
Introduction
Situated at the intersection of three major tectonic plates, existing buildings throughout the vast area of Indonesia are at risk of experiencing damaging events from both shallow crustal and subduction earthquakes. Each region has a distinctive seismic hazard situation with varying contributions from different source types: megathrust, Benioff, and shallow crustal (Irsyam et al., 2020). In regions where multiple seismic sources can contribute to hazard, it is important to ensure that the number of ground motion data representing each source type in the set is proportional with contribution ratio from hazard deaggregation for each source since it can affect collapse performance evaluation of buildings based on studies by Chandramohan et al. (2017). Subduction motions are known to have longer duration with higher damaging effects when compared to shallow crustal motions with similar response spectral acceleration (Raghunandan & Liel, 2013).
SNI 9273: 2024 is the applicable standard for seismic evaluation and retrofit of existing buildings in Indonesia, primarily adopted from the United States (US) standard, ASCE 41-17. The standard requires development of hazard-consistent ground motion set using the procedure described in ASCE 7-16, which involves a complex process of selecting and modifying a minimum of 11 ground motion time series for each set, requiring knowledge of probabilistic seismic hazard analysis (PSHA) results. Currently, worldwide ground motion records with corrected acceleration time series are available for public access via two separate portals, PEER NGA-West2 portal database for records from shallow crustal zones (Ancheta et al., 2014) and NGA-Sub for subduction zones (Kishida et al., 2017).
2National Center for Earthquake Studies, Jalan Turangga No. 3-5, Bandung 40263, Indonesia
3Davy Sukamta and Partners, Jalan Ciputat Raya Blok A / 18, South Jakarta 12310, Indonesia
4National Institute of Science and Technology, Jalan Moch. Kahfi II No. 30, South Jakarta 12630, Indonesia
In the conterminous US, presence of multiple "types" of seismic sources contributing to hazard is only relevant in a small area of the country such as the state of Washington and Oregon due to presence of Cascadia subduction zone (Atwater et al., 1995) and is not a prevalent condition in other areas. In contrast, with numerous subduction zones spreading throughout Indonesia (Irsyam et al., 2020), multiple sources contributing to hazard occurs in almost all areas of Indonesia, which can be confirmed from hazard contribution ratio map for megathrust source shown in Figure 1. Multiple seismic source contribution to hazard further complicates the process of developing a hazard-consistent ground motion set (Baker & Lew, 2017) while a public platform that can supply accurate ground motion set considering multiple seismic sources for evaluation and retrofit of existing building in Indonesia was not yet available.
The research presented in the paper is hinged on exploring the viability of developing such tool. Completion of the platform substantiated with test case results verified that such tool can be developed by incorporating several basic ingredients discussed in the paper. The platform has been officially launched for public access by the Indonesian Ministry of Public Works for the purpose of enhancing efficiency and accuracy of seismic evaluation and retrofit of existing buildings.
Current Ground Motion Selection and Modification Procedure
The procedure for developing a ground motion set for assessments of buildings is outlined by ASCE (2016) and ASCE (2017), adopted into SNI (2019) and SNI (2024). Design examples for this procedure are available in Zimmerman et al. (2017) and some of the main points that have relevance to the research are summarized below.
The hazard demand for a design case is characterized by a target response spectrum, which can be chosen as a single uniform hazard spectrum (UHS) or multiple conditional mean spectra (CMS). The two-period points code-defined spectrum is a simplified version of the UHS. For design condition with multiple source hazard contribution, the hazard is also characterized by earthquake magnitude, site-to-source distance, and contribution ratio from hazard deaggregation for each source type.
Candidate ground motion records are screened from PEER NGA-West2 (Ancheta et al., 2014) and NGA-Sub database (Kishida et al., 2017), for shallow crustal and subduction zone earthquakes, respectively. The screening process is performed using reasonable ranges of relevant parameters, including earthquake magnitude, source-to-site distance, average shear wave velocity in top 30 m layer (Vs30), longest usable period, and structural period range of interest to obtain an adequate number of candidate ground motions. Additionally, significant duration, D5-95, defined as the duration between 5% and 95% of an earthquake's accumulated energy, is a screening parameter often used in practice to obtain hazard-consistent collapse performance evaluation as recommended by Chandramohan et al. (2017).
The final selection of ground motions requires expert judgment based on various criteria, such as hazard contribution ratio for each source, compatibility of spectral shape, the number of records from a single event, scale factor limit, and size of screening range for relevant parameters. Judgment applied can affect target-match of ground motion set. For sites where multiple seismic source contribution is present it is important to ensure that the final selection of motions in the set is proportionally consistent with the hazard deaggregation data, particularly the contribution ratio for each source type (i.e. megathrust, Benioff, shallow crustal). Judgment regarding spectral-compatibility is aided by the quantitative parameter - mean squared error (MSE) to handpick ground motion data considered to have the best match with the target. The MSE of a particular ground motion data is computed in terms of the difference in the natural logarithm of spectral acceleration for that record and the target as described by PEER (2010):
\[MSE_{record} = \frac{1}{n} \sum_{k=1}^{p} \left\{ ln \left[ Sa_{target}(T_k) \right] - ln \left[ f \times Sa_{record}(T_k) \right] \right\}^2\] (1)
where \(Sa_{target}(T_k)\) denotes response spectral acceleration, Sa of the target at period \(T_k\), \(Sa_{record}(T_k)\) denotes response spectral acceleration, Sa of the record at period \(T_k\), and p denotes the number of period points within the period range of interest. The scale factor f is, computed as follows:
\[ln[f] = \frac{1}{n} \sum_{k=1}^{p} ln \left( \frac{Sa_{target}(T_k)}{Sa_{record}(T_k)} \right)\] (2)
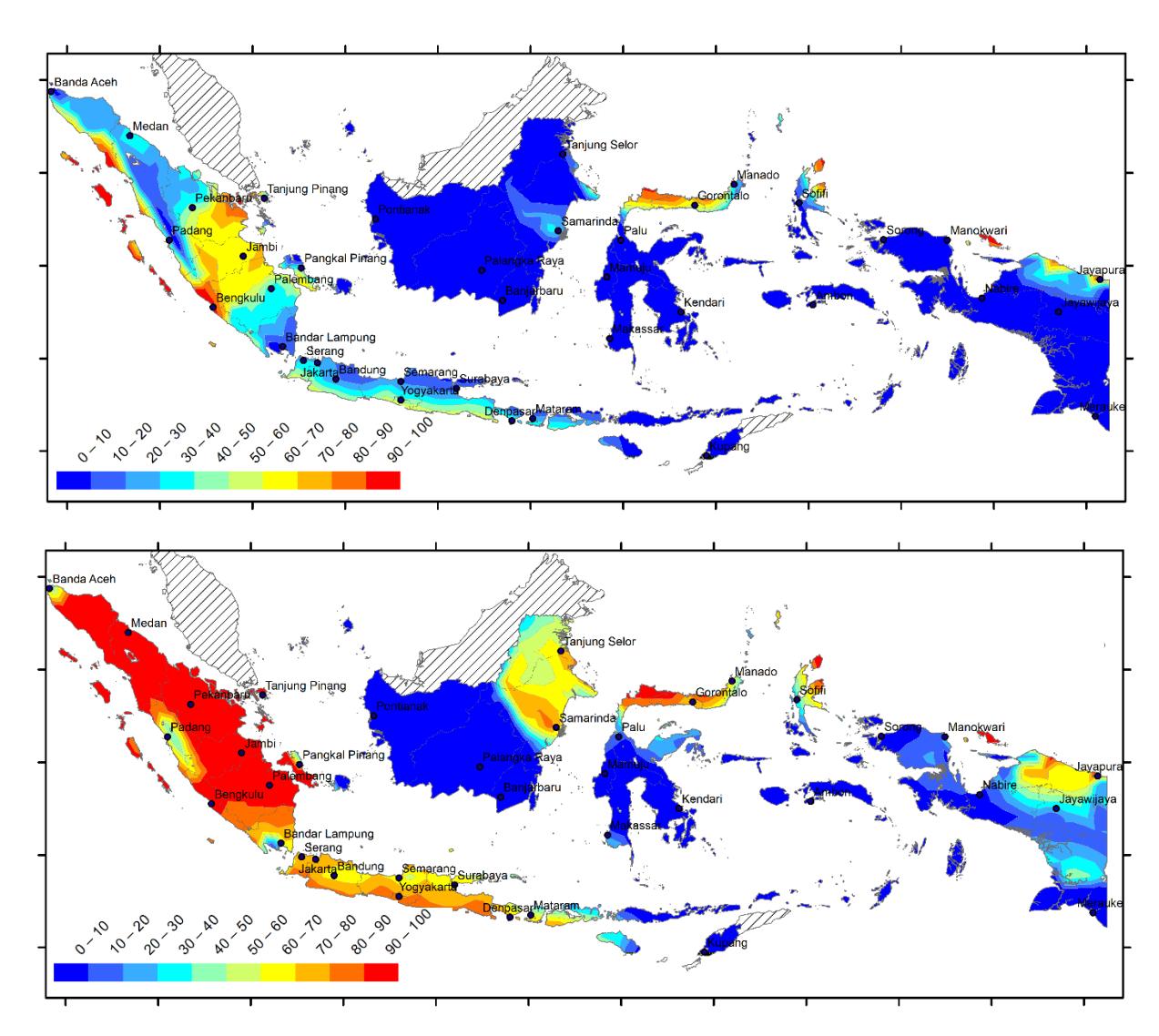
Megathrust contribution (%) map of Indonesia for 975-year earthquake at Sa of 0.2 s (top) and 1.0 s (bottom).
When a sufficient number of ground motion data cannot be acquired, the selection process needs to be reverted back to the screening step with a more relaxed search range. Once adequate ground motion data is attained in the set, each individual data can be modified using scaling or spectral-matching technique to achieve spectral average fit within period range of interest. It can be noted from the above discussion that the current practice of developing ground motion sets for seismic assessments is a semi-manual process requiring expert judgment.
Process Automation for a Specific Purpose of Application
The main objective of the research is to produce a tool useable by practicing engineers, including those who lack knowledge about PSHA or hazard deaggregation. Thus, the platform needs to have the following characteristics: (1) full automation, requiring minimal interaction with engineers; (2) capability of considering multiple seismic source contributions from shallow crustal and subduction zones; and (3) high accuracy, obtaining a ground motion set with a good match between the average and target spectrum.
Integration of relevant data into the platform is a fundamental aspect of automation. In order to increase useability and automate a complex process with multiple possible choices, the platform need to be customized to one specific application with a scope of implementation compatible with availability of relevant data. Availability of seismic hazard deaggregation data for Indonesia is currently limited to site coordinates with 0.1-degree latitude and longitude grid spacing (i.e. 11.1 km) and at four period points: peak ground acceleration (PGA), 0.2, 1.0, and 3.0 s. The data are also available for 975- and 225-year earthquake return periods. With this data set, the platform was specifically developed for the seismic evaluation of existing buildings with a fundamental period not greater than 2 s (i.e., upper bound
structural period of 3 s) for all cities of Indonesia not located on near-fault sites. To automate the process, this platform uses direct scaling with applicable scale factor limit for modifying the ground motion records as permitted by ASCE (2016). To simplify input parameters supplied by engineers, the target spectrum is limited to two-period point Uniform Hazard Risk (UHS) spectrum for 975- and 225-year earthquake return periods per SNI 9273: 2024.
Per ASCE 7-16, a site is classified as near-fault if it is located within 15 km or 10 km from surface projection of an active fault capable of producing events not less than Mw7 or Mw6, respectively. Thus, ground motion set development for near-fault sites requires additional data including site-specific hazard deaggregation data at the exact site coordinate of interest and detailed information about fault geometry and mechanism nearby. For such cases, Hayden et al. (2014) developed a method based on statistical studies of ground motions at near-fault sites where pulse-like motions are incorporated into the ground motion set with proportions determined as a function of ground motion intensity and source-to-site distance. The platform is not capable of facilitating this special case but it can still be resourceful in producing ground motion sets for other sites.
Figure 2 illustrates the anatomy of the platform comprising several essential data components and a programming algorithm that can automatically run various processes to generate a user-requested ground motion set. Each important aspect of the automated platform will be discussed in the following sections.
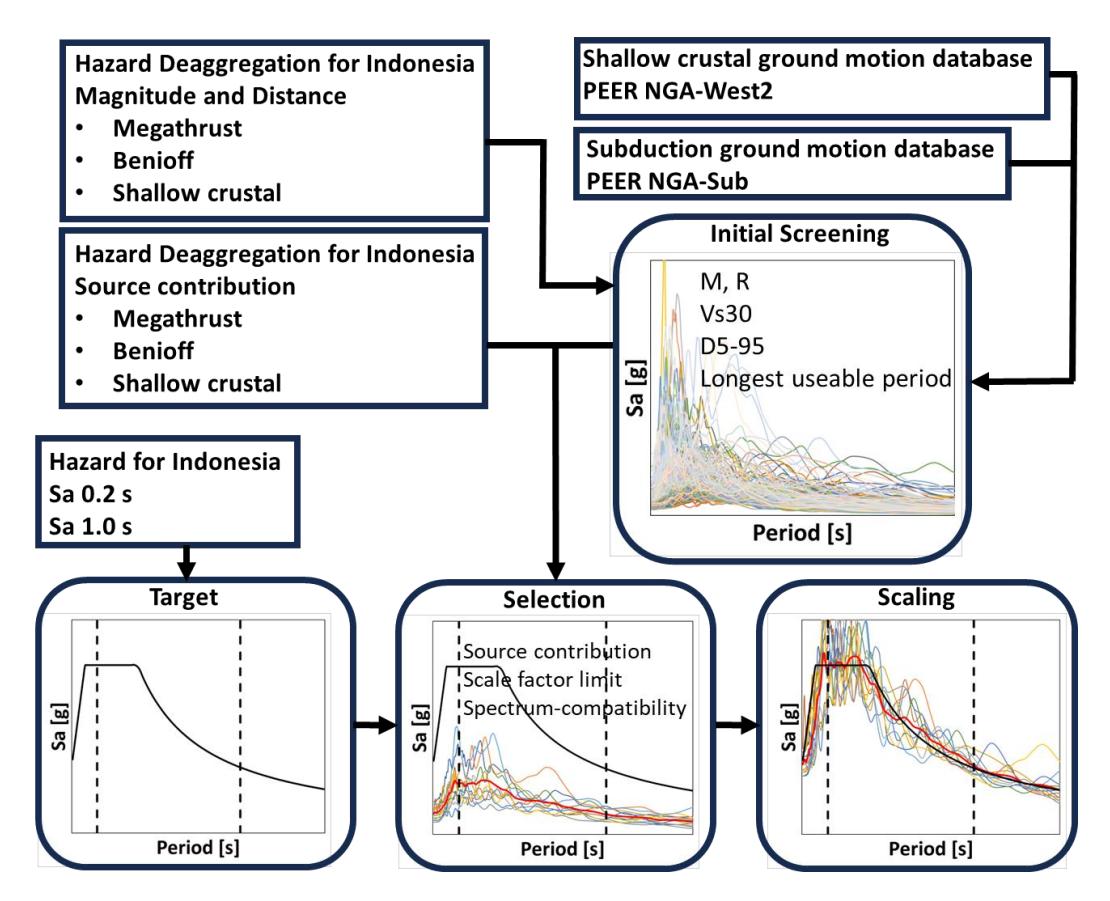
Schematic diagram describing data components and processes within the automated ground motion selection and scaling platform
Basic Data Components and Processes considering Multiple Seismic Source
The basic data components in the platform include (1) ground motion record flat-file databases published by PEER NGA-West2 and NGA-Sub and (2) a nationwide seismic hazard flat-file database containing post-processed seismic hazard and deaggregation data for Indonesia published by The National Center for Earthquake Studies (PuSGeN). These data components are a fundamental part of the platform for the purpose of considering multiple source hazard contribution.
There are approximately 20,000 data in the PEER NGA-West2 database from shallow crustal zone (Ancheta et al., 2014) and 70,000 in the PEER NGA-Sub database from subduction zone (Kishida et al., 2017). Each record in the database contains relevant metadata for selection purposes including source type, earthquake magnitude, source-to-site
distance, Vs30, significant duration, longest useable period related to time series correction, and spectral response acceleration, Sa, as defined in the SNI 9273: 2024. Corrected (readily-useable) acceleration time series are also available for each record in the respective PEER NGA databases.
Seismic hazard deaggregation data, specifically earthquake magnitude, source-to-site distance, and contribution ratio, are also available for 975- and 225-year earthquakes at four period points—PGA, 0.2, 1.0, and 3.0 s— for three source types—megathrust and Benioff from subduction zones and shallow crustal— as published by PuSGeN (2022).
Coupled with these data components, programming algorithms were developed to automate several processes: development of target spectrum, initial screening, final selection and scaling.
The target spectrum for selection and modification is based on SNI 9273: 2024, which is a two-point (i.e. Sa at 0.2 and 1.0 s) code-defined UHS based on PSHA by PuSGeN (2021) for 975- and 225-year earthquake return period, defined as Basic Safety Earthquake: BSE-2E and BSE-1E, respectively in the standard.
Initial screening is a process where reasonable ranges of relevant parameters, including earthquake magnitude, distance, significant duration, Vs30, longest usable period associated with the site, and structural period range of interest, are applied to screen candidate ground motions from the overall database. Screening criteria incorporated in the platform are summarized in Table 1. The screening algorithm applied for this process starts with Tier 1 screening criteria. If Tier 1 screening criteria do not yield an adequate number of ground motion with distribution proportional to source type contribution, the more relaxed Tier 2 screening criteria will be used. The targeted selection parameters for each source type are determined as follows:
\[M_{ave}^{target} = \frac{1}{p} \sum_{k=1}^{p} M^{deaggregation}(T_k)\] (3)
\[R_{ave}^{target} = \frac{1}{p} \sum_{k=1}^{p} R^{deaggregation}(T_k)\] (4)
\[D_{5-95\,ave}^{target} = f\left(M_{ave}^{target}, R_{ave}^{target}\right) \tag{5}\] where \(M_{ave}^{target}\) and \(R_{ave}^{target}\) denote the targeted selection parameter value for each source type computed as the average of the deaggregation data, \(M^{deaggregation}(T_k)\) and \(R^{deaggregation}(T_k)\), respectively, over the period range of interest. Linear interpolation is proposed to estimate values at period points between current nationwide deaggregation data, available at four period points: PGA, 0.2, 1.0, and 3.0 s. The parameter \(D_{5-95~ave}^{target}\) denotes the targeted significant duration for each source type, computed as a function of magnitude and distance and is estimated based on the model developed by Bahrampouri et al. (2021).
Multiple seismic source contribution is an essential and unique aspect of hazard condition in Indonesian cities. For hazard consistency, the proportion of source type within each ground motion set is determined based on the results of deaggregation analysis by PuSGeN (2022) available. The targeted contribution ratio for each source type \(CR_{ave}^{target}\) is computed as the average of the contribution ratio data from deaggregation \(CR^{deaggregation}(T_k)\) over the period range of interest as follows:
\[CR_{ave}^{target} = \frac{1}{p} \sum_{k=1}^{p} CR^{deaggregation}(T_k)\] (6)
Similar to other deaggregation parameters, linear interpolation is proposed to estimate values at period points between current national deaggregation data points.
The next important process—the selection—comprises of spectral compatibility assessment of every record in the initially-screened database. Records determined to have the best match for the ground motion set are then incrementally added to the ground motion set. The selection algorithm used for the platform is not based on the conventional approach using individual ground motion \(MSE_{record}\) values (Eq. (1)) but using a more robust optimization approach that was introduced by Jayaram et al. (2011). Details of this approach are discussed in the following section. Additional selection criteria are also incorporated in the algorithm to obtain ground motion set composition proportional to the contribution for each source type (Table 2).
Table 1 Initial screening criteria.
| Parameter | Screening Criteria | ||
|---|---|---|---|
| Magnitude | \[\begin{split} M_{min} &= M_{ave}^{target} - 0.15 \times M_{ave}^{target} \\ M_{max} &= M_{ave}^{target} + 0.15 \times M_{ave}^{target} \end{split}\] | (7) (8) | |
| Source-to-site distance | \[R_{min} = \begin{cases} max \ (0, R_{ave}^{target} - 0.25 \times R_{ave}^{target}) \\ max \ (0, R_{ave}^{target} - 0.50 \times R_{ave}^{target}) \end{cases}\] | Tier 1 Tier 2 | (9) |
| Source-to-site distance | \[R_{max} = \begin{cases} R_{ave}^{target} + 0.25 \times R_{ave}^{target} \\ R_{ave}^{target} + 0.50 \times R_{ave}^{target} \end{cases}\] | Tier 1 Tier 2 | (10) |
| Cincificant direction | \[D_{5-95min}^{target} = D_{5-95ave}^{target} - 0.5 \times D_{5-95ave}^{target}\] | (11) | |
| Significant duration | \[D_{5-95\;max}^{target} = D_{5-95\;ave}^{target} + 0.5 \times D_{5-95\;ave}^{target}\] | (12) | |
| Soil site class | \[Vs30 = \begin{cases} \geq 350 & \text{site class } B \\ 175 \text{ to } 1500 & \text{site class } C \\ \leq 750 & \text{site class } D \\ \leq 350 & \text{site class } E \end{cases}\] | (13) |
Table 2 Selection criteria.
| Parameter | Selection Criteria | |||||
|---|---|---|---|---|---|---|
| Scale factor limit | \[SF = \begin{cases} 0.25 \text{ to } 4.0\\ 0.25 \text{ to } 5.5 \end{cases}\] | Crustal Benioff or Megathrust | (14) | |||
| Number of ground motions for each contributing source type | \[\begin{cases} N_{crustal} \leq CR_{ave}^{crustal} \\ N_{interface} \leq CR_{ave}^{interface} \\ N_{interslab} \leq CR_{ave}^{interslab} \end{cases}\] | \(\begin{array}{c} N_{total} \ N_{total} \ N_{total} \ \end{array}\) | (15) | |||
| Maximum number of selected ground motions from a single event | \(\begin{align*} N_{crustal,max}^{event} &= min \ N_{megathrust,max}^{event} &= min \ N_{benioff,max}^{event} &= min \ \end{array}\) | \(n(0.5 * N_{crustal}, 3)\) \(n(0.5 * N_{megathrust}, 3)\) \(n(0.5 * N_{benioff}, 3)\) | (16) | |||
| Total number of ground motion | \(N_{total} \le 11\) | (17) | ||||
In the final process—scaling—, the algorithm determines a unique scale factor for each seed motion to achieve compatibility with the target. A minimum scale factor limit of 0.25 and maximum scale factor limits of 4.0 and 5.5 for crustal motions and subduction motions, respectively are incorporated in the algorithm. The maximum scale factor for subduction motions is relaxed to obtain a reasonable number of compatible data as discussed by Zimmerman et al. (2017). Watson-Lamprey and Abrahamson (2006) have also confirmed that the use of large scale factor —even greater than 10— can still provide accurate estimates of the mean response. To achieve reasonable record-to-record variability, the number of records from a single event for each source type is limited to the lesser of three or half of the required number of ground motions for each respective source type. The ground motions are then further scaled up so that the ratio of average of spectra in the set to target spectrum is not less than 0.9 within the period range of interest, as required by SNI (2019).
Ground Motion Selection Optimization Algorithm to Improve Accuracy
The PEER NGA-West2 and NGA-Sub database portals are able to assist selection process by providing \(MSE_{record}\) of each ground motion computed independently associated to a given target spectrum and period range. Record with the lowest \(MSE_{record}\) have the best spectral compatibility with the target. Engineer can then manually select 11 records to be incorporated into the ground motion set. This semi-manual approach does not allow any control of global spectral compatibility measured based on the spectral average of the entire ground motion set and can often result in a poor or unacceptable match between the average of a ground motion set and the target (Figure 6). The spectral average of a particular ground motion set \(Sa_{set}(T_k)\) at period \(T_k\) can be computed as follows:
\[Sa_{set}(T_k) = \frac{1}{n} \left( \sum_{j=1}^n f \times Sa_{record,j}(T_k) \right)\] (18)
Consequently, the MSE of the ground motion set \(MSE_{set}\) can be computed as:
\[MSE_{set} = \frac{1}{p} \sum_{k=1}^{p} \left\{ ln \left[ Sa_{target}(T_k) \right] - ln \left[ Sa_{set}(T_k) \right] \right\}^2\] \[\tag{19}\]
The direct use of \(MSE_{set}\) for the entire ground motion set for selection purposes is problematic because its computation requires all ground motion to have already been selected. However, \(MSE_{set}\) can be computed gradually and cumulatively at each increment to systematically direct the ground motion selection at every increment toward improving the target spectral match for the entire ground motion set. Jayaram, et al. (2011) introduced an optimization approach to improve global spectral match compatibility at every increment. To incrementally develop a ground motion set from an empty set, Jayaram, et al. proposed an alternate ground motion selection algorithm incorporating this optimization approach, where the first ground motion to be added to the set is randomly chosen to be the first available ground motion from the database. The proposed technique was very effective for limited test cases considering shallow crustal ground motions only.
The algorithm used in this platform adopts a similar approach to that introduced by Jayaram with some modification. To develop a ground motion set from an empty set, instead of randomly selecting the first available ground motion in the database, the algorithm incorporated in the platform chooses a ground motion record with the minimum \(MSE_{record}\) in the screened database as the first data in the set. In the algorithm described above, the average spectrum MSE of the ground motion set \(MSE_{set}\) (Eq. (19)) is gradually and cumulatively computed and minimized at each selection increment. This approach results in a significant improvement in the global level accuracy between average and target spectrum. The extensive case study discussed in the subsequent section suggests that this algorithm consistently produces a ground motion set with an average spectral compatibility surpassing that using the conventional method.
Results
To demonstrate the effectiveness of the developed fully automated platform and algorithm, this study selected five cities with four distinctive design cases per city, resulting in 40 sets of ground motions applicable for sites not classified as near-fault. Among these cities, two are the most populated cities in Indonesia, namely Jakarta and Surabaya, located in Java and Medan in Sumatra, respectively. The remaining cities were selected to provide insight on results for sites outside Java, namely Makassar in Sulawesi and Balikpapan in Kalimantan. The level of seismic hazard selected was the 975-year (i.e., BSE-2E) and 225-year earthquakes (BSE-1E). These cities have varying degrees of seismic hazard intensities and varying source types contributing to hazards on the site (Figures 3 and 4). Makassar and Balikpapan have lower ground motion intensities and are more dominated by shallow crustal earthquakes, while Jakarta, Surabaya, and Medan have much higher ground motion intensities and are dominated by subduction earthquakes.
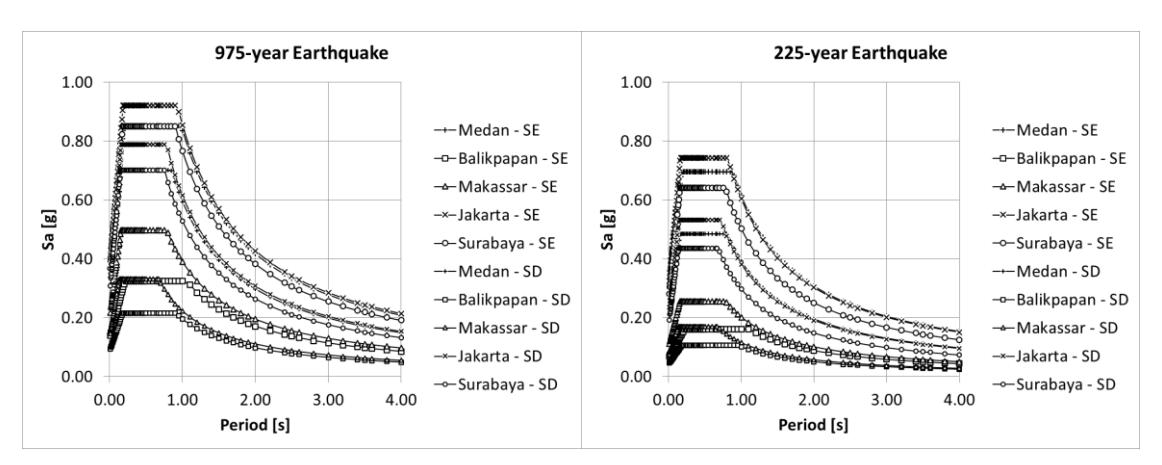
Figure 3 Target spectra for the selected cities for 975-year (left) and 225-year (right) earthquakes.
The design cases for site classes SD and SE per SNI 1726: 2019, were selected because of the high relevance of the two site classifications with cities in Indonesia. This is consistent with nationwide Vs30 maps developed by Irsyam et al. (2017). Two period ranges were selected to represent a majority of real design cases with varying structural dynamic characteristics of existing buildings. The period range of 0.1 to 1.0 s is selected to represent design case of low-rise existing buildings and the period range of 0.3 to 3.0 s for multi-story buildings or performance-enhanced base-isolated buildings. These two cases result in differing source type proportioning within the set (Figure 5).
Forty hazard-consistent ground motion sets for five cities in Indonesia were successfully generated using the automated ground motion selection platform. The proportioning of each source type for each set is consistent with the nationwide deaggregation results published by PuSGeN for the period range of interest (Figures 4 and 5). For period range involving longer periods (i.e. 0.3 to 3.0 s), consistently, more subduction ground motions are required in all sites. In contrast, for period range involving shorter periods (i.e. 0.1 to 1.0 s), more shallow-crustal ground motions need to be incorporated on all sites. The results demonstrate that the ground motion selection platform can automatically consider multiple source type contribution in conformance with nationwide deaggregation data.
Another vital feature employed in the automated platform is the modified greedy optimization algorithm, which significantly improved the computational accuracy of the resulting average spectrum of the selected and scaled ground motions with respect to the target spectrum, surpassing what is achievable using the conventional method. Figure 6 shows an example of one design case for Jakarta with a reduction in the mean absolute error (MAE) from 13.4 % using the conventional method to 4.9% using the modified greedy method. A comparative study was also applied to all 40 ground motion sets (Figure 7) with an original MAE ranging from 3.0% to 13.4% using the conventional method reduced to 1.6% to 6.2% using the modified greedy method. In every case, the MAE of the ground motion set average spectrum obtained using the modified greedy method is less than that obtained using the conventional method, demonstrating significant improvement of accuracy when modified greedy algorithm is used.
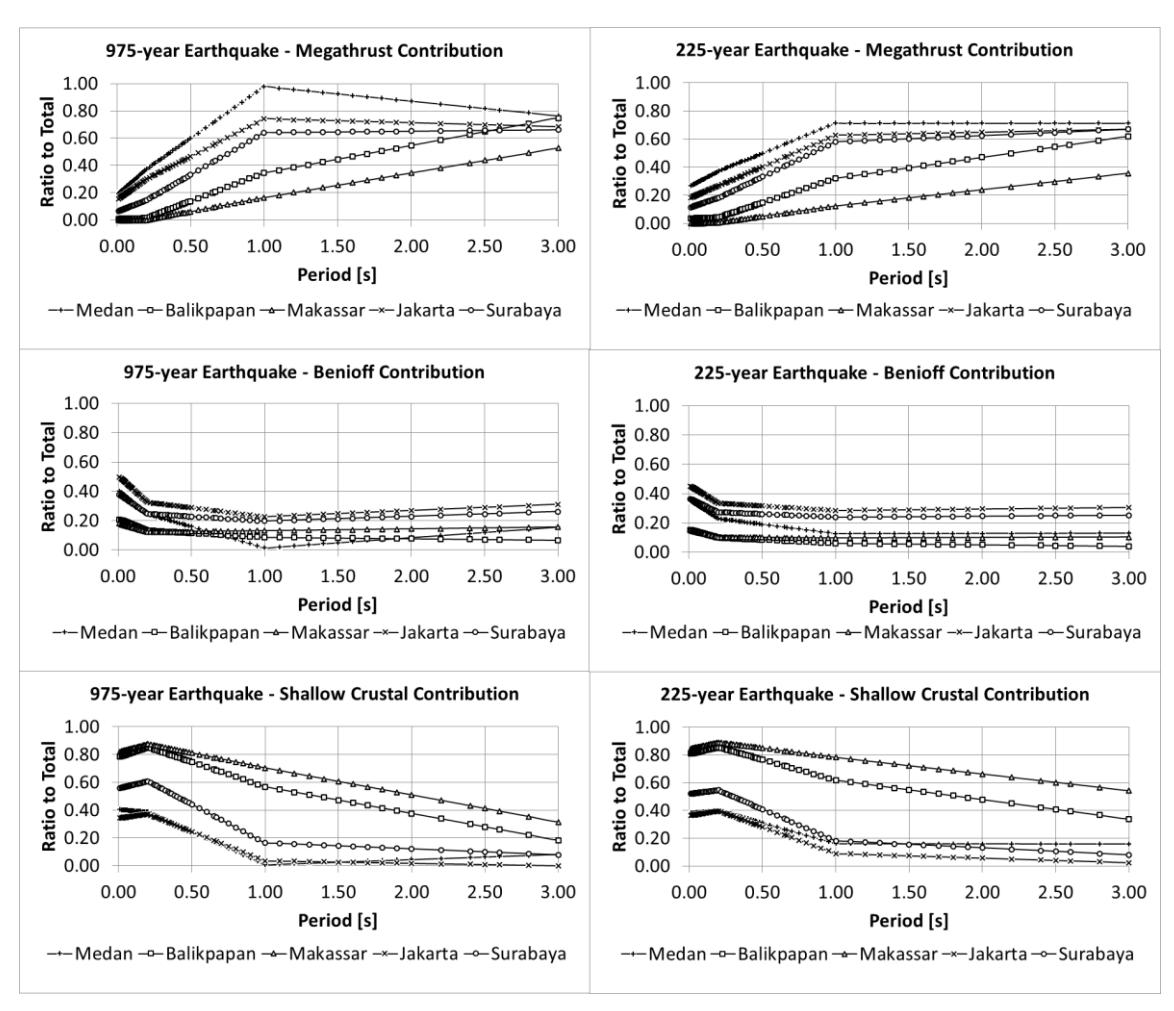
Hazard contribution from each source type.
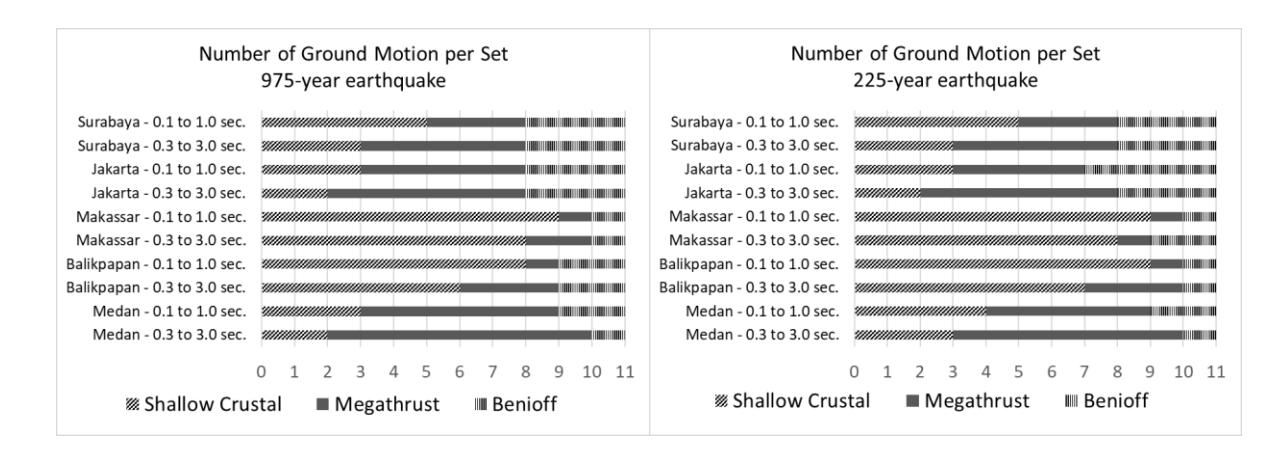
Number of interface (megathrust), intraslab (Benioff), and shallow-crustal ground motion for each design case.
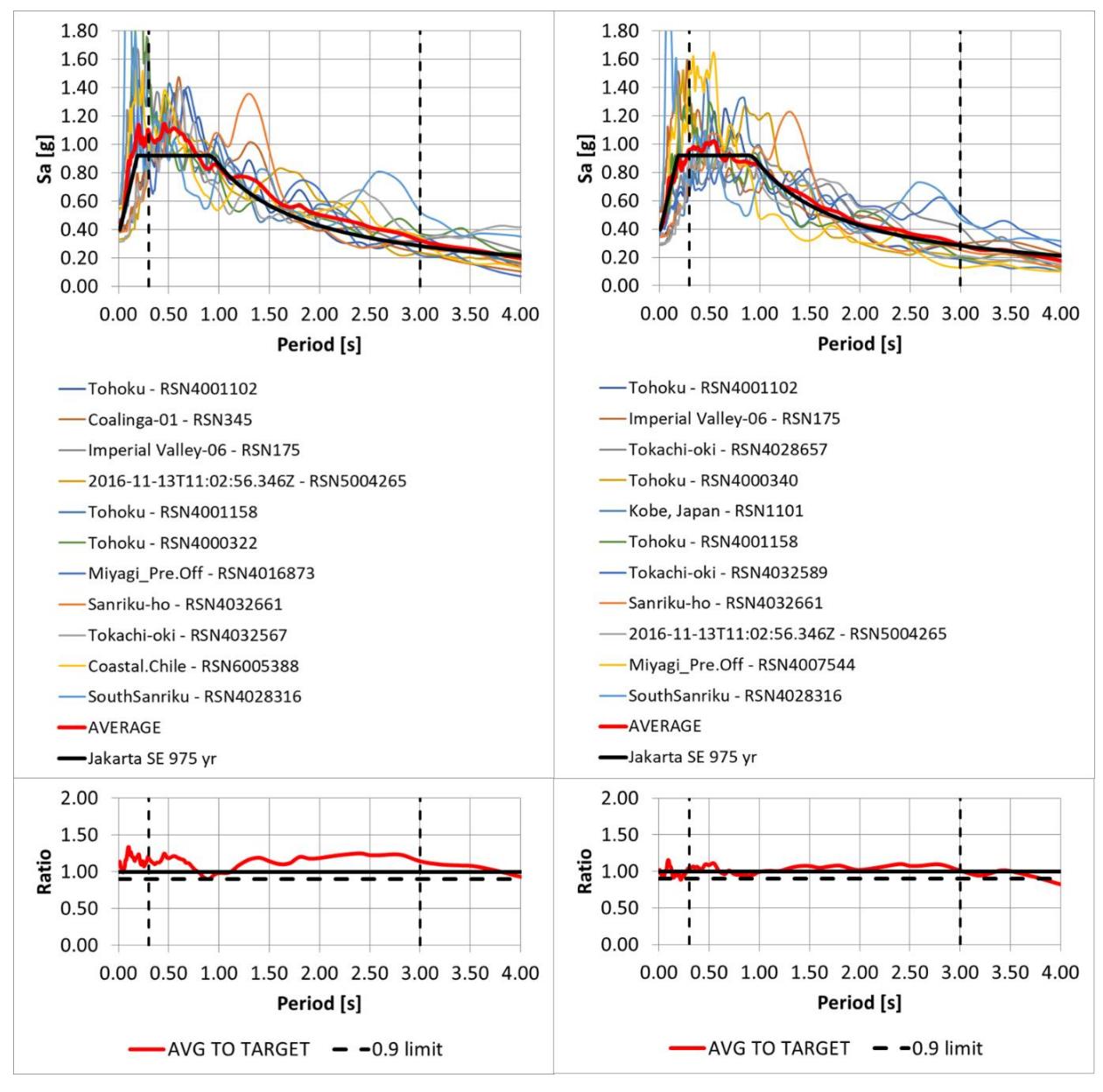
Ground motion set for Jakarta using the conventional method (left) and modified greedy optimization technique (right).
| GM ID | RSN | EQ Name | Year | Mw | Rrup [km] | Network | Station Name | Vs30 [m/s] | Source Type | Longest Useable Period [s] | Scale Factor | D 5-95 [s] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 4001102 | Tohoku | 2011 | 9.12 | 169 | K-NET | KANOSE | 228 | Subduction-interface | 65 | 3.91 | 112 |
| 2 | 175 | Imperial Valley-06 | 1979 | 6.53 | 32 | USGS | El Centro Array #12 | 197 | Crustal-non-pulse | 11 | 3.43 | 20 |
| 3 | 4028657 | Tokachi-oki | 2003 | 8.29 | 183 | K-NET | SAPPORO | 130 | Subduction-interface | 71 | 3.95 | 82 |
| 4 | 4000340 | Tohoku | 2011 | 9.12 | 138 | KiK-net | SHINGOU | 226 | Subduction-interface | 101 | 2.2 | 111 |
| 5 | 1101 | Kobe, Japan | 1995 | 6.9 | 39 | CEOR | Amagasaki | 256 | Crustal-non-pulse | 8 | 1.05 | 19 |
| 6 | 4001158 | Tohoku | 2011 | 9.12 | 214 | K-NET | FUJINOMIYA | 318 | Subduction-interface | 163 | 5.2 | 83 |
| 7 | 4032589 | Tokachi-oki | 1968 | 8.26 | 149 | PARI | aomori-s | 186 | Subduction-interface | 13 | 1.52 | 81 |
| 8 | 4032661 | Sanriku-ho | 1994 | 7.76 | 132 | PARI | Aomori-G | 186 | Subduction-interface | 92 | 2 | 57 |
| 9 | 5004265 | 2016-11-13T11:02:56.346Z | 2016 | 7.85 | 109 | -999 | INGS | 270 | Subduction-intraslab | 20 | 5.26 | 82 |
| 10 | 4007544 | Miyagi_Pre.Off | 2011 | 7.15 | 132 | KiK-net | YAMAGATA | 279 | Subduction-intraslab | 26 | 3.75 | 42 |
| 11 | 4028316 | SouthSanriku | 2003 | 7.03 | 104 | K-NET | NARUKO | 347 | Subduction-intraslab | 8 | 2.69 | 47 |
Table 3 Ground motion set for BSE-2E (975-y) earthquake Jakarta site class SE with a period range of 0.3 to 3.0 s.
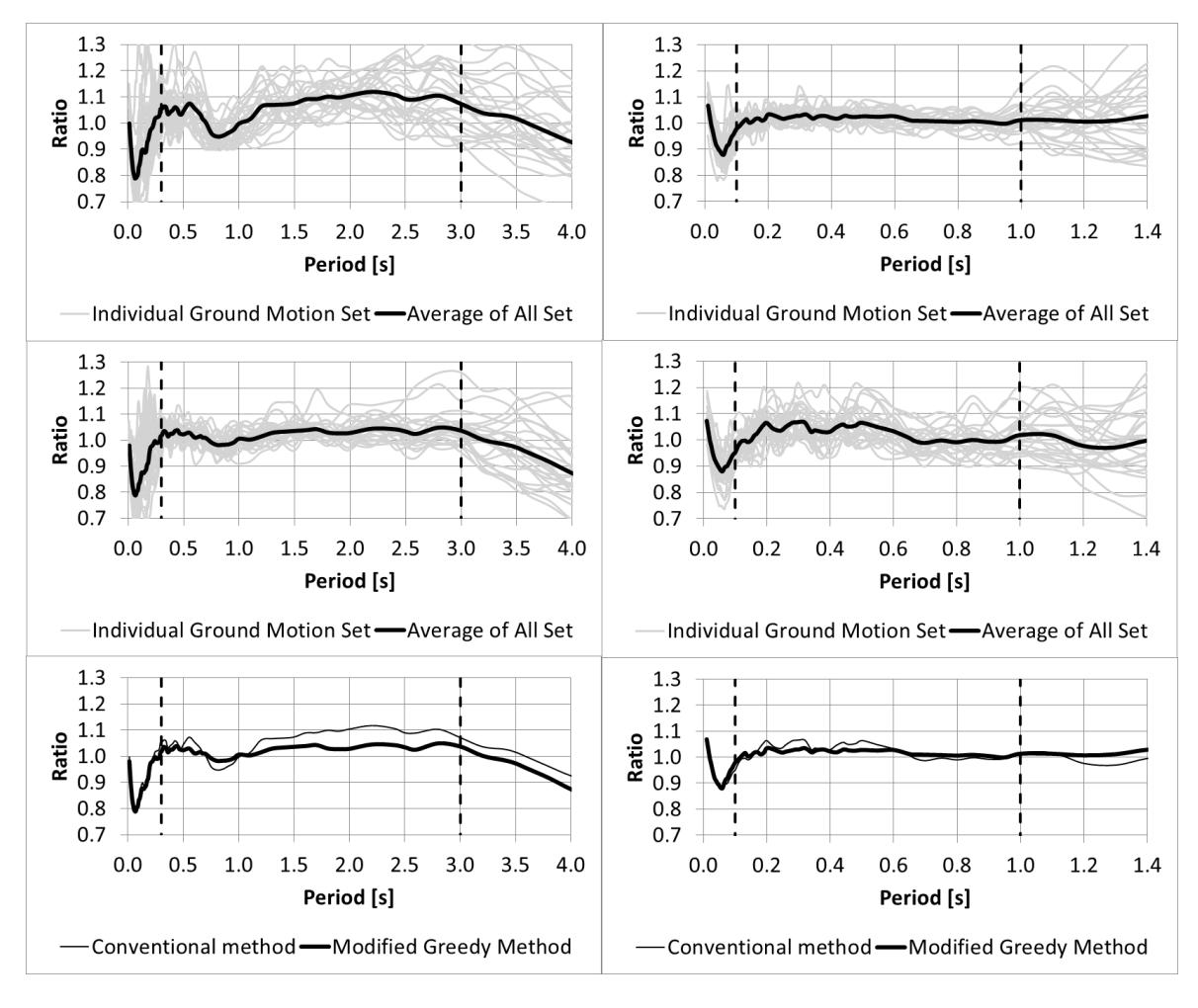
Figure 7 Average-to-target ratio using conventional method (top), modified greedy method (middle), and comparison between both methods (bottom) for different period range of interest
Discussion
Results of the test case studies validate that a fully-automated engineering tool capable of producing hazard-consistent ground motion set considering multiple source type with good target-match accuracy can be developed by incorporating three key components.
First, a specifically-defined scope of application manageable through full-automation must be determined and incorporated into the platform. The developed platform is not a general-purpose type that can respond to almost any type of user queries, such as the PEER NGA-West2 and NGA-Sub. General-purpose selection platform requires input data derived from expert judgment beforehand and thus is a semi-manual process. In contrast, the developed platform is a special-purpose type, designed to be highly specific and focused on one particular use. The primary advantage of this type of platform is it allows full-automation and thus can be useful to wider range of users. The platform was specifically developed to assist engineers who prefer full-automation for determining ground motion set to assess seismic-resistance of existing buildings. Data components and algorithm within the platform must be customized to a particular set of prescribed requirements in one specific standard, which in this case is SNI 9273: 2024 and hence must be updated accordingly to accommodate revisions in future editions.
In order to achieve a fully automated platform, limitations of use are inevitable. The platform is not capable of accommodating near-fault sites since such case requires site-specific data supported by expert engineering judgment and knowledge on nearby faults geometry and mechanism as discussed by Hayden et al. (2014). The platform is also not suitable to evaluate structures with upper bound period range above 3 s (i.e. very tall structures) since such condition will require a special type of modification technique to achieve reasonable accuracy as discussed by Alexander et al. (2022). Another limitation of the platform is that it is not suitable for other types of structures –other than existing buildings—since different set of prescribed requirements associated with different design standard will apply. Modifications need to be applied to the system, data, and algorithm to develop other platforms specifically suited for other types of structures. Despite the limitations of use, the platform will still be useful for seismic assessment of the majority of existing buildings.
The second key component to incorporate into the platform is the capability to automatically consider multiple source types. This can be achieved by preparing (1) a nationwide hazard deaggregation database for three types of seismic source: megathrust, Benioff, and shallow-crustal encompassing relevant structural periods of interest; and (2) ground motion database from subduction zones and shallow-crustal zones with spectral response data consistent with specific standard of reference. A proper selection algorithm is also needed to automate development of ground motion set with proportion of motions for each source type consistent with hazard deaggregation data.
The third key component that the platform require is an optimization algorithm that can improve accuracy of the ground motion set. This can be accomplished using the modified greedy selection algorithm initially introduced by Jayaram et al. (2011). This algorithm is capable of improving target-match at every selection increment to obtain a globally optimal ground motion set and hence is the key component in creating a platform with good accuracy and thereby reduce potential over-conservatism in seismic assessments. Modified greedy algorithm can only be employed if platform automation is implemented and if the required number of ground motion in the set is established beforehand (i.e. the desired output is a finalized ground motion set instead of an initially-screened set of ground motion data).
This platform has been officially launched by the Indonesian Ministry of Public Works and is publicly-accessible via the following link: https://rsa.ciptakarya.pu.go.id/gm2024/. Given a site coordinate, earthquake return period, site class, and period range of interest, the platform automatically provides a set of 11 ground motion data in the form of response spectrum plot (Figure 7) and tabulated metadata of selected records, including PEER record sequence number (RSN), source type, and corresponding scale factor for each record (Table 3). Equipped with this information, engineers can download the unscaled acceleration time series for both horizontal directions from PEER NGA-West2 (https://ngawest2.berkeley.edu/) and NGA-Sub portal (https://www.risksciences.ucla.edu/nhr3/ngasubduction/gmportal). The scale factor for each seed motion needs to be applied appropriately to the analysis model with the same scale factor applied for both horizontal directions of each individual record. Response plot showing compliance of the developed ground motion set with respect to target per standard requirements is also provided by the web platform. A more comprehensive manual for the public web platform is available in the manual by PuSGeN (2024).
Conclusion
The research presented in this paper confirms that an efficient engineering tool for seismic assessments of buildings in Indonesia –a fully-automated ground motion selection and scaling platform that can produce ground motion set with good target-match accuracy considering multiple seismic source contribution— can be developed. The paper explains about the specific purpose of the platform with its limitations, anatomy of the platform, the characteristics of the data components, and programming algorithm incorporated in the automated platform. The effectiveness of the fully automated ground motion selection platform was evaluated and verified using extensive test cases representative of anticipated seismic assessment conditions of existing buildings in Indonesia. The paper also discusses the conditions required to develop the platform: (1) specifically-defined scope of application; (2) comprehensive data integration to consider multiple seismic source contribution; (3) modified greedy selection algorithm to enhance target-match accuracy.
This platform has been validated by an appointed verification team and officially launched by the Indonesian Ministry of Public Works to enhance the efficiency and accuracy of seismic assessments with the broader goal of improving seismic safety and is publicly-accessible via the following link: https://rsa.ciptakarya.pu.go.id/gm2024/.
This platform still has limitations of use because it was designed specifically for seismic assessments of buildings not located on near-fault sites based on SNI 9273: 2024. The research findings obtained during development of the platform is expected to serve as the basis for future research in the field. Modification and upgrades of the database and automation algorithm can be studied further to (1) accommodate future editions of the associated Indonesian standards; (2) develop different platforms for other specific applications, for example, to produce ground motion sets for seismic design and assessment of bridges in Indonesia; (3) accommodate more complex design situations, including near-fault sites; and (4) improve the platform's accuracy via expansion of worldwide ground motion database.
Acknowledgment
The authors acknowledge the research facility provided by Bandung Institute of Technology (ITB) and The National Center for Earthquake Studies (PuSGeN).
Compliance with ethics guidelines
The authors declare they have no conflict of interest or financial conflicts to disclose.
This article contains no studies with human or animal subjects performed by authors.