
Introduction
The development of soft robotic grippers has garnered significant attention due to their exceptional potential in manipulating delicate, irregular, and fragile objects, which are typically challenging for conventional rigid robotic systems. Unlike traditional grippers that rely on rigid structures, soft robotic grippers are characterized by flexible, compliant materials that adapt to the shape and surface contours of objects (Buzzatto et al., 2023; Janghorban & Dehghani, 2022; Shih et al., 2019). This adaptability allows for safer, more versatile interactions, making soft grippers particularly advantageous in fields such as manufacturing (Müller, Aydemir, Glodde, & Dietrich, 2020), healthcare (Zhou et al., 2021), food handling (Wang, Torigoe, & Hirai, 2017), and logistics (Um, Jeong, Kim, Rhee, & Choi, 2024). Despite their promise, the design of soft robotic grippers often involves inherent trade-offs between key performance parameters, such as gripping force, adaptability, energy efficiency, and manufacturing complexity.
The majority of soft robotic grippers are based on three primary actuation mechanisms. Pneumatic actuators (Bhat, Ambrose, & Yeow, 2023; Wenkai Huang, Xiao, & Xu, 2020; Xu, Jiang, Jiang, & Lu, 2020), which utilize pressurized air to induce movement, offer high flexibility but are typically coupled with bulky and power-hungry air compressors, which limit their application in compact or energy-constrained environments. Dielectric elastomers (DEAs) (Yaguang Guo, Liu, Liu, & Leng, 2021; Yuxuan Guo et al., 2023; Youn et al., 2020), on the other hand, enable rapid actuation through electrical stimulation; however, they require high operating voltages, posing safety and practical usability challenges. Granular jamming-based grippers (Karimi, Alizadehyazdi, Busque, Jaeger, & Spenko, 2020; Li, Sun, & Herrmann, 2024; Piskarev et al., 2023), which modulate stiffness by vacuum-sealing granular materials, are capable of adjusting their
mechanical properties on demand, but they often exhibit limited adaptability when handling objects of diverse shapes and sizes.
In response to these limitations, Kirigami-based designs have emerged as a promising alternative by leveraging precisely engineered cuts to achieve mechanical adaptability without the need for external actuation systems (Branyan, Rafsanjani, Bertoldi, Hatton, & Mengüç, 2022; Hong et al., 2021; Yang, Vella, & Holmes, 2021). Unlike traditional origamibased structures, which rely on folding geometries, Kirigami introduces strategically placed cuts that allow for controlled deformation, resulting in lightweight, scalable, and cost-efficient gripper structures (Kako & Okumura, 2024). While previous studies have investigated Kirigami-inspired grippers using rigid or paper-based materials, these designs often lack the durability and mechanical resilience required for practical applications (Buzzatto et al., 2024; Chung, Coutinho, & Rodrigue, 2023; Liang et al., 2023). To address these challenges, the present study adopts an elastomeric approach by utilizing Liquid Silicone Rubber (LSR), a material that provides high flexibility, robustness, and longevity. The proposed Kirigami-based gripper enhances adaptability while minimizing energy consumption and fabrication complexity, offering a viable solution to the constraints faced by traditional soft robotic grippers.
The application potential of soft robotic grippers spans several industries, each with its own set of unique challenges. In food processing (Wang, Hirai, & Kawamura, 2022; Wang et al., 2017; Yamanaka, Katagiri, Nabae, Suzumori, & Endo, 2020), grippers must handle soft, fragile items, such as fruits, pastries, and bread, without causing deformation or damage. The passive compliance of the Kirigami gripper allows it to conform to the shape of the object, ensuring that force is distributed evenly to minimize the risk of damage. In manufacturing (Müller et al., 2020; Stano & Percoco, 2021), precise and repeatable gripping is required for objects with varying mechanical properties, including stiffness and surface texture. Unlike pneumatic systems that rely on external pressure control, the Kirigami gripper self-regulates its force distribution and adapts to different materials, enhancing operational efficiency. In logistics and warehousing (Angelini et al., 2020; Tang, Wang, Xue, Yang, & Cao, 2021; Um et al., 2024), automated sorting systems must manage objects with diverse geometries, weights, and sizes while maintaining energy efficiency. The lightweight, energyefficient Kirigami gripper addresses these demands by facilitating rapid, low-cost manipulation of objects, making it ideal for robotic pick-and-place applications.
This research introduces a Kirigami-based soft robotic gripper that is optimized for handling delicate and irregularly shaped objects through an extension-based actuation mechanism. The gripper adapts to various object geometries by applying force at both ends, allowing for versatility in gripping a wide range of shapes and textures. To investigate the design's effectiveness, three different thickness variations are explored, each optimized for specific object sizes and force requirements. The study integrates Finite Element Analysis (FEA) simulations to examine the mechanical deformation of the Kirigami structure, a V-belt-inspired design to enhance force distribution and stability, and a papercutting-based approach to improve grasping adaptability. By combining innovative material choices, advanced simulation techniques, and versatile structural designs, this research lays the groundwork for the development of reliable, adaptable, and cost-effective soft robotic grippers suitable for a variety of industrial applications, including food handling, manufacturing, and logistics.
Design Principles and Materials for Soft Robotic Grippers
Building on the challenges discussed in the Introduction, the development of soft robotic grippers requires a careful balance of compliance, adaptability, and durability. Soft grippers are designed to achieve gentle, adaptive grasping, making them ideal for handling delicate and irregularly shaped objects a crucial requirement for applications in food handling, biomedical engineering, and automated logistics. One of the key challenges in soft robotic design is ensuring a high degree of conformability to object shapes while maintaining structural integrity. Traditional soft grippers often rely on pneumatic actuation, which allows even force distribution and flexibility in grasping. However, this study explores an alternative approach Kirigami-inspired design, which leverages strategic cuts to achieve precise deformation control without complex actuation mechanisms.
Material selection plays a vital role in ensuring the functionality of such grippers. Silicone elastomers, particularly Liquid Silicone Rubber (LSR) (Buzzatto et al., 2022), offer high elasticity, resilience, and biocompatibility, making them wellsuited for applications requiring repeated deformation. Other materials, including thermoplastic elastomers (Duduta, Clarke, & Wood, 2017), hydrogels (Zhu, Chen, Chai, Ding, & Wu, 2023), and advanced composites (Bhat et al., 2023), contribute unique properties that enhance performance under different environmental conditions. By integrating Kirigami principles with flexible materials, the gripper can achieve controlled structural deformation, enabling precise and gentle interaction with fragile or irregularly shaped objects.
This material-driven approach, combined with Kirigami-based adaptability, establishes a novel pathway for designing cost-effective, high-precision soft robotic grippers that do not rely on traditional pneumatic or jamming-based actuation. The following sections further explore the mechanical analysis, simulation validation, and experimental evaluation of this innovative gripper.
Simulation and Modeling Techniques for Soft Robotics
Simulation and modeling have become indispensable in developing soft robotics, providing a means to analyze and optimize designs before fabrication (Cheng, Saputra, Shi, & Wang, 2024). For soft robotic grippers, modeling tools like COMSOL Multiphysics allow for the simulation of finite element analysis, such as deformation, force distribution, and material flexibility, which are challenging to predict in physical prototypes (Du, Hughes, Wah, Matusik, & Rus, 2021; Weicheng Huang, Huang, Majidi, & Jawed, 2020; Lipson, 2014). In Kirigami-based gripper designs, modeling helps identify how specific cut patterns affect flexibility and structural integrity. By simulating these factors, designers can fine-tune the Kirigami structure to achieve the desired properties, such as optimal grip force and adaptability for handling objects with varying shapes and stiffness. For instance, COMSOL Multiphysics enables detailed analysis of stress and strain within the Kirigami structures under different loading conditions, allowing precise control over the gripper's behavior.
Modeling techniques also aid in understanding how material properties influence gripper performance. For example, by inputting specific characteristics of elastomeric materials, simulations can predict how a gripper will perform over time, including potential wear and deformation from repeated use. This predictive capacity is invaluable for applications requiring durability, such as industrial automation and medical devices, where consistent performance is crucial. Furthermore, simulations can incorporate external factors, such as temperature and humidity, which affect material behavior and, consequently, the gripper's effectiveness. These computational tools save time and resources by reducing the need for physical prototypes and allowing for rapid iteration and optimization. The insights from simulation models contribute to a more robust design process, ensuring that Kirigami-based soft robotic grippers meet functional requirements for flexibility, durability, and adaptability in real-world applications.
Advancements in Kirigami Grippers Through Material Innovation
Material innovation has significantly propelled the development of Kirigami-based soft robotic grippers by shifting from traditional materials like paper to more advanced, robust alternatives. This evolution has broadened the capabilities of Kirigami grippers, enhancing their durability, adaptability, and responsiveness. One of the standout materials in this realm is Liquid Silicone Rubber (LSR), which was chosen in this research for its exceptional elasticity, resilience, and suitability for intricate structural designs. Unlike paper-based Kirigami (Jiayu Tao, Khosravi, Deshpande, & Li, 2022), which cannot withstand frequent or sustained use, LSR's flexibility allows it to endure repeated deformation, making it ideal for automated tasks such as sorting and packaging, where precision and longevity are crucial. This study diverges from previous approaches that predominantly utilize finger-actuated designs and 3D-printed fabrication methods (Bryantono, Saduk, Hong, Tsai, & Tseng, 2023; Chin-Yi & Saputra, 2021; Wang & Hirai, 2018). While most soft grippers are based on a finger-actuator model, with independently actuated fingers that wrap around objects, our design capitalizes on the Kirigami technique. Kirigami allows for precise, flexible cuts that result in a single-structure gripper capable of adapting to different shapes without multiple moving parts. This unique approach simplifies the gripper's control and operational reliability.
Furthermore, instead of 3D printing, this research employs a mold-based process with LSR, allowing us to capture fine Kirigami patterns with high fidelity. When combined with LSR, the mold-based method offers flexibility and durability and scales more effectively for mass production compared to 3D-printed designs. LSR's compatibility with molding ensures the gripper maintains its structural integrity and functionality across a wide temperature range, unlike other materials like thermoplastic elastomers or hydrogels, which are more limited in application scope. In addition to its structural advantages, LSR facilitates the integration of sensors, enabling the gripper to respond intelligently by adjusting grip strength or configuration based on real-time feedback. This capability further elevates the utility of Kirigami-based designs, allowing for precise handling of a wide array of objects in industrial and research settings. Using LSR and mold-based Kirigami techniques, this research introduces a gripper that combines material durability, design simplicity, and intelligent response, offering an innovative solution within the field of soft robotics that meets the complex demands of modern applications.
Research Methodology
Model Inspiration
The Kirigami gripper model developed in this study is inspired by Kirigami, a traditional Japanese art of paper cutting, which has been explored in previous works to create flexible, adaptive mechanical structures for robotic applications (Jiayue Tao, Khosravi, Deshpande, & Li, 2023). In this design, the Kirigami-inspired structure enables the gripper to undergo smooth opening and closing motions, dynamically adjusting its form to accommodate objects with varying geometries, including irregular and delicate shapes. The gripper's functionality and adaptability are achieved through a series of strategically engineered cuts and folds that enhance its flexibility without compromising structural integrity.
As depicted in Figure 1, the initial prototype of the gripper was fabricated and tested, showcasing its ability to conform to objects of diverse sizes and shapes. Constructed from a thin, durable polymer or composite material, this prototype demonstrates the effectiveness of the Kirigami design in achieving a balance between flexibility and strength. The precise cut-and-fold patterns within the gripper structure allow for optimal deformation during object interaction, providing gentle yet secure grasping. This first experimental design serves as a foundational model for further refinement and testing in more complex, real-world applications.
Design of Kirigami soft gripper inspired by the paper cutting.
The prototype design of the gripper integrates a V-belt-inspired structure to improve stability, durability, and efficiency, particularly for industrial applications (Zheng et al., 2020). By leveraging the V-belt's intrinsic strength, flexibility, and even distribution of forces, the gripper is able to adapt to various object geometries while minimizing the risk of damage. The combination of the Kirigami pattern's adaptability and the V-belt's mechanical resilience creates a highly versatile and reliable solution for precision-driven tasks. This approach aims to address the limitations of traditional soft grippers by incorporating the mechanical advantages of the V-belt while maintaining the flexibility of Kirigami designs. Figure 2 illustrates the initial concept of this V-belt-based gripper design, which serves as the foundation for further refinement. Through this integration, the study investigates how the Kirigami design can be optimized to complement V-belt mechanics, ultimately enhancing the gripper's performance.
Design of V-belt gripper.
Model Applied
Building upon design concepts from sources (Gomes, Chang, Saputra, & Chang, 2025; Yang et al., 2021) and (Zheng et al., 2020), this study integrates Kirigami structures' adaptability with V-belt-inspired mechanisms' strength to create an advanced soft robotic gripper, as shown in Figure 3. The Kirigami cut-and-fold design enables the gripper to conform to various object shapes, while the V-belt mechanism ensures even, robust force distribution for high-precision handling. This hybrid model is flexible, lightweight, and energy-efficient, capable of grasping diverse objects without
reconfiguration. The design reduces slippage and damage risks, simplifies manufacturing, and lowers production costs, offering a versatile and cost-effective solution.
However, certain limitations remain. Thin polymer materials used in the Kirigami structure may wear out under heavy or repeated use, requiring frequent maintenance or part replacement. The complex design may extend development timelines and demand customization for specific applications. Additionally, while suitable for delicate and irregularly shaped objects, the gripper may struggle with heavy-duty tasks requiring high stability and force, such as lifting large loads. Ensuring durability, optimizing structural stability, and improving integration with control systems are critical areas for future development to enhance the gripper's performance and versatility across diverse applications
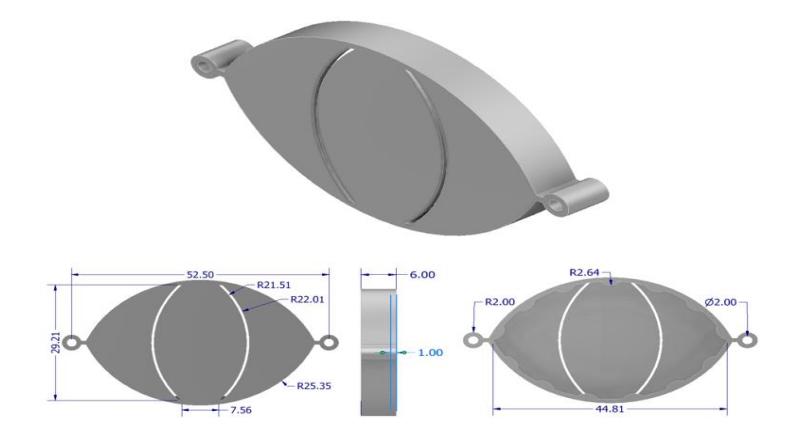
Detailed model of the proposed Kirigami soft gripper (in mm).
Simulation Analysis of Kirigami Gripper
The finite element analysis (FEA) of the Kirigami-based gripper was performed to evaluate its mechanical response under static loading conditions. The simulation model was developed using COMSOL, with material properties carefully selected based on experimental characterization and relevant literature. The focus of the analysis was on the effect of static load on the gripper's deformation and stress distribution. Material properties, such as elasticity and tensile strength, were incorporated to reflect the performance of Liquid Silicone Rubber (LSR CN-251) and ensure an accurate representation of the gripper's mechanical behavior under applied forces. Table 1 summarizes the key material parameters used in the analysis, highlighting the specific properties considered to model the gripper's response under static conditions. This approach provides a comprehensive understanding of the gripper's structural integrity and performance under typical operating conditions.
To replicate real-world gripping scenarios, the material properties of LSR CN-251 were incorporated into the simulation, with boundary conditions applied to model a 5 N distributed force along the gripping surfaces. This force simulates typical operational conditions, where the gripper engages with objects of varying geometries. Prescribed displacements were also applied along the x, y, and z axes to model the controlled movement of the gripper under static loading conditions. A refined tetrahedral mesh was employed to ensure high resolution in areas with significant stress gradients, particularly around the Kirigami folds, enhancing the accuracy of the deformation, strain distribution, and stress concentration analysis. The simulation results show the gripper's capabilities when the grasping process is carried out without an object, providing valuable insights for future design optimizations aimed at improving durability and functionality in soft robot applications, as shown in Figure 4.
| Parameter | Value/Range |
|---|---|
| Young's Modulus (Pa) | 300000 |
| Poission's Ratio | 0.45 |
| Actuation Force (N) | 1 - 5 N |
| Tensile Strength (MPa) | 5 – 7 |
| Silicone Hardness (Shore A) | 25 |
Table 1 Key Parameters Used in Simulation
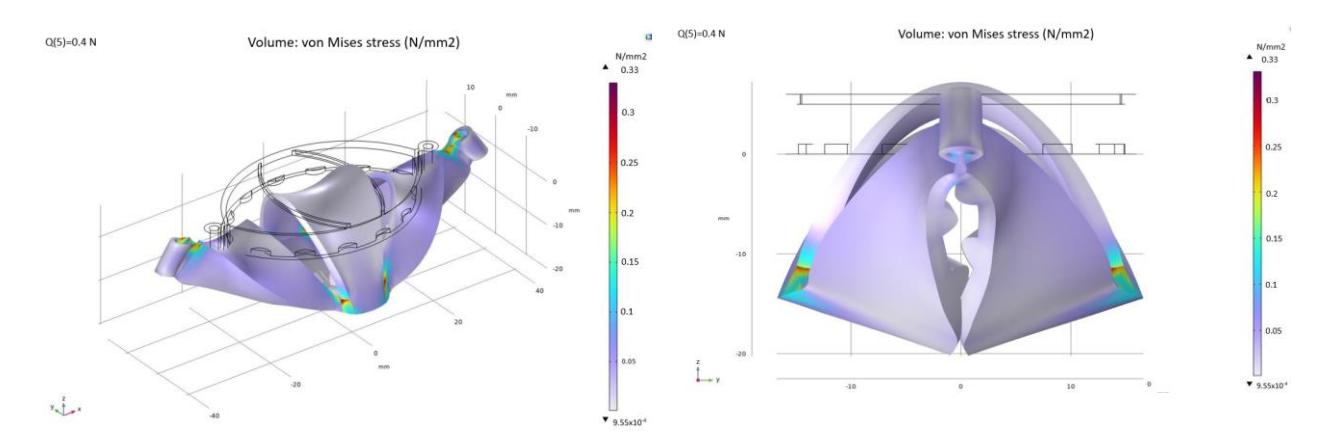
Grip Simulation on Kirigami Gripper Using Finite Element Analysis.
Design and Modeling of the Kirigami Gripper Mold
The design and modeling of the Kirigami gripper mold are crucial for achieving precise structure and adaptability. A highprecision mold model was created using CAD software to control dimensions, tolerance, and surface finishes. The design incorporates intricate geometries to support the folding mechanisms, ensuring flexibility while maintaining structural integrity.
The CAD model was designed to accommodate the elastomer material's characteristics, considering wall thickness, folding angles, and anticipated stresses, as shown in Figures 5 and 6. It includes precise detailing for replicating Kirigami cuts with smooth, sharp edges and integrates channels and vents for even material distribution during casting. This digital model is a foundation for testing and validating the mold design before physical fabrication, ensuring the final mold meets performance requirements for the gripper's applications.
Design and Modelling for Kirigami Gripper Mold (3D)
Design and Modelling for Kirigami Gripper Mold (2D)
Fabrication Process of the Kirigami Gripper Mold
The Kirigami gripper mold is fabricated using fused deposition modeling (FDM) with PLA (polylactic acid), which is chosen for its biodegradability, ease of printing, and stability. The FDM process converts the CAD model into a physical mold, layer by layer, as shown in Figure 7, capturing the intricate Kirigami design with high precision. PLA's strength and compatibility with FDM ensure accurate geometries and structural integrity. Layer height and infill density are optimized to preserve fine details and durability, while channels and vents facilitate even material distribution during casting. Postprinting, the mold undergoes finishing steps like sanding or acetone vapor smoothing to enhance surface quality. A final inspection ensures dimensional accuracy and surface integrity, which are crucial for the gripper's performance. This FDM approach offers a cost-effective, scalable solution for rapid prototyping and functional testing of the gripper design.
Fabrication Process for Mold using FDM technology
Manufacturing of the Kirigami Gripper
The Kirigami gripper is manufactured by casting food-grade platinum silicone (CN-251) into a 3D-printed mold. CN-251, an FDA-approved platinum-cured silicone, offers high heat resistance, chemical stability, and suitability for direct food contact Table 2. Its flexibility and durability are ideal for applications requiring structural integrity under diverse conditions.
| Physical properties | ||||||
|---|---|---|---|---|---|---|
| Material number | CN-251 | |||||
| Color | Translucent | |||||
| Viscosity (cps) | 21000-23000 | |||||
| Tensile length (Mpa) | 6.6 | |||||
| Elongation (%) | 400 | |||||
| Tear strength (kn/m2 ) | 28 | |||||
| Hardness (Degree) | 25o±2 | |||||
| Working time (Hours) | 12-24 | |||||
| Burn/fire (Degree) | 50-100o | |||||
| Density (g/cm3 ) | 1.0 - 1.2 | |||||
| Young's Modulus (Mpa) | 1.0 - 3.5 | |||||
| Poisson's Ratio | 0.45 - 0.5 | |||||
| Elongation at Break (%) | 500 - 700 | |||||
| Thermal Conductivity (W/mK) | 0.2 | |||||
| Operating Temperature Range (oC) | -55 to 200 | |||||
| Compression Set (%) | 20-30 | |||||
Table 2 Properties of silicone CN-251
Process for Using CN-251 Material:
- 1. Prepare measuring tools and containers for CN-251, ensuring separate instruments for Part A and B.
- 2. At room temperature (approximately 25-27°C), measure out Part A and Part B of CN-251 in the appropriate ratio:
- 3. For typical flexibility and curing: Use a 1:1 ratio.
- 4. For customized hardness or faster curing: Use a 10:1 ratio.
- 5. Mix Parts A and B thoroughly in a container until a uniform consistency is achieved.
- 6. Carefully pour the mixed silicone into the prepared Kirigami gripper mold, ensuring even distribution.
- 7. Allow the silicone to cure. Initial hardening will occur within 12-24 hours, while complete curing may take 1- 3 days, depending on environmental factors such as temperature and humidity.
This step-by-step process ensures the CN-251 material cures effectively, resulting in a durable, flexible gripper optimized for testing. To expedite the curing time, the process can be accelerated by increasing the temperature within the recommended range, typically around 60°C (140°F), which enhances the material's curing rate. The entire process, including this temperature-controlled curing, is depicted in Figures 8 to 10.
Mixing process with a dose of 5 mm (ratio 1:1).
The process of pouring the mixed liquid into the mold
The process of removing the hardened Kirigami gripper
Manufacturing of the Gripper Connector
The gripper connector was fabricated using fused deposition modeling (FDM) 3D printing, ensuring precision and compatibility with the uArm Swift Pro robotic system. The CAD model was first converted into an STL file and processed using Ultimaker Cura software. To achieve a balance between resolution and manufacturing efficiency, a layer height of 0.2 mm was selected, while an infill density of 75% was applied to maintain structural strength while optimizing material usage. The print speed was set at 50 mm/s to enhance dimensional accuracy, particularly in areas requiring precise alignment for attachment. Support structures were strategically added to ensure overhang stability during printing. The design and results of the gripper connector are as depicted in Figures 11 and 12.
Design of the gripper connector The result of the gripper connector
After fabrication, the gripper connector was assembled onto the uArm Swift Pro's end effector (Figure 13). The installation process involved aligning the connector with the 4th-axis motor shaft and securing it using screws and nuts to prevent misalignment or rotational instability during operation. Unlike the original end-effector mechanism of the uArm Swift Pro, which applies force in a conventional gripping motion, the actuation process for the Kirigami-based gripper operates in an opposite manner.
In the original end-effector, the gripping force is applied directly through contraction. However, for the Kirigami gripper, the actuation process requires reversing the force application. Instead of direct contraction, the gripper expands outward first and then collapses inward to achieve a secure grasp. This inverse actuation method ensures that the unique Kirigami structure deforms correctly, allowing it to adapt to various object geometries. The motor-driven rotational movement transmits force through the customized connector, facilitating smooth and precise control over the opening and closing of the gripper. To ensure proper functionality, calibration was conducted to fine-tune the actuation motion, minimizing backlash and mechanical play. Functional tests validated that the modified mechanism allowed stable and precise gripping without restricting the motor's range of motion. Additionally, the PLA-printed connector demonstrated sufficient durability and rigidity to withstand repeated actuation cycles, confirming its viability for robotic grasping applications.
Installation on uArm Swift Pro robot
Results and Discussion
Simulation Results of the Kirigami Gripper's Mechanical Performance
The Kirigami gripper's mechanical performance was simulated using COMSOL Multiphysics to analyze deformation and stress distribution under varying loads. Material properties like elastic modulus and tensile strength were applied, and boundary conditions were set to replicate real-world gripping actions. Tensile forces ranging from 0.1 N to 4.3 N, reflecting the uArm Swift Pro robot's gripping capacity, were applied. The simulation results (Error! Reference source not found.) showed a clear force-length relationship, with the gripper elongating more rapidly at lower forces and exhibiting a linear response at higher forces. This confirms the gripper's ability to handle increasing forces while maintaining structural integrity.
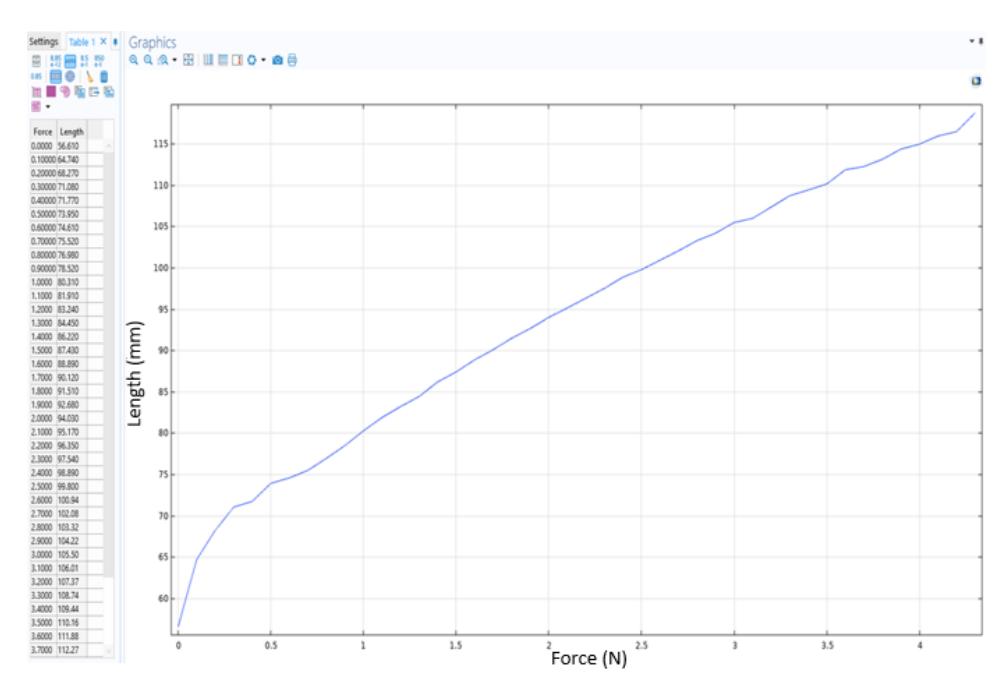
Figure 14 The graph of Force vs length in COMSOL Multiphysics Software.
| Table 3 | Deformation | Result of | Kirigami Grippe | r in Comsol Simula | ation |
|---|
| Force (N) | Stress (N/mm²) | Length (mm) | Force (N) | Stress (N/mm²) | Length (mm) |
|---|---|---|---|---|---|
| 0 | 0 | 56.670 | 2.2 | 1.82 | 96.350 |
| 0.1 | 0.08 | 64.740 | 2.3 | 1.90 | 97.540 |
| 0.2 | 0.17 | 68.270 | 2.4 | 1.98 | 98.890 |
| 0.3 | 0.25 | 71.080 | 2.5 | 2.07 | 99.800 |
| 0.4 | 0.33 | 71.770 | 2.6 | 2.15 | 100.94 |
| 0.5 | 0.41 | 73.950 | 2.7 | 2.23 | 102.08 |
| 0.6 | 0.50 | 74.600 | 2.8 | 2.31 | 103.32 |
| 0.7 | 0.58 | 75.520 | 2.9 | 2.40 | 104.22 |
| 0.8 | 0.66 | 76.980 | 3.0 | 2.48 | 105.50 |
| 0.9 | 0.74 | 78.520 | 3.1 | 2.56 | 106.01 |
| 1.0 | 0.83 | 80.300 | 3.2 | 2.65 | 107.37 |
| 1.1 | 0.91 | 81.900 | 3.3 | 2.73 | 108.74 |
| 1.2 | 0.99 | 83.240 | 3.4 | 2.81 | 109.44 |
| 1.3 | 1.07 | 84.450 | 3.5 | 2.89 | 110.05 |
| 1.4 | 1.16 | 86.220 | 3.6 | 2.98 | 111.88 |
| 1.5 | 1.24 | 87.430 | 3.7 | 3.06 | 112.27 |
| 1.6 | 1.32 | 88.890 | 3.8 | 3.14 | 113.15 |
| 1.7 | 1.41 | 90.120 | 3.9 | 3.22 | 114.38 |
| 1.8 | 1.49 | 91.500 | 4.0 | 3.31 | 114.98 |
| 1.9 | 1.57 | 92.680 | 4.1 | 3.39 | 115.97 |
| 2.0 | 1.65 | 94.030 | 4.2 | 3.47 | 116.48 |
| 2.1 | 1.74 | 95.170 | 4.3 | 3.55 | 118.76 |
To provide a more comprehensive analysis of the mechanical behavior of the Kirigami gripper, Table 3 presents the corresponding stress values (in MPa) obtained from the simulation at various applied tensile forces ranging from 0 N to 4.3 N. The data shows a gradual and proportional increase in stress with respect to the applied load, indicating a consistent distribution of force across the Kirigami structure. Notably, the maximum stress observed at 4.3 N reached approximately 3.55 MPa, which is still within the elastic range of the Liquid Silicone Rubber (LSR CN-251) material used in the gripper. This linear progression supports the simulation's prediction that the Kirigami structure deforms uniformly under tension, reinforcing its reliability and structural integrity in practical robotic applications. The tabulated results enhance the validity of the finite element analysis and offer clear insight into how the material responds under various operational loads.
COMSOL Multiphysics and Experimental Tensile Test Graphs
Experimental tensile tests confirmed the simulation results, showing a consistent, proportional increase in gripper length with applied forces ranging from 0.1 N to 4.0 N. The force vs. length graph (Figure 15) demonstrated predictable elongation, validating the gripper's elastic and flexible response. Both simulation and experimental data revealed linear or near-linear behavior, indicating that the material operates within its elastic range without structural failure. The robot's motion range constrained the maximum elongation of 118.76 mm but was sufficient for the gripper's functional requirements. This alignment between experimental and simulation results highlights the gripper's robustness, adaptability, and ability to handle various forces while maintaining structural integrity. These findings are crucial for ensuring the gripper's performance in robotics and manufacturing applications, where reliability and flexibility are essential.
To further assess the accuracy of the simulation, a quantitative comparison between the COMSOL model and experimental data was performed. The Mean Absolute Percentage Error (MAPE) was calculated to be 0.22%, indicating an exceptionally high correlation between the simulated and real-world results. Additionally, the Root Mean Square Error (RMSE) was found to be 0.63 mm, which is a minimal deviation relative to the total elongation range. These accuracy metrics confirm that the COMSOL model reliably predicts the gripper's behavior under tensile forces, reinforcing confidence in its use for design optimization and performance evaluation.
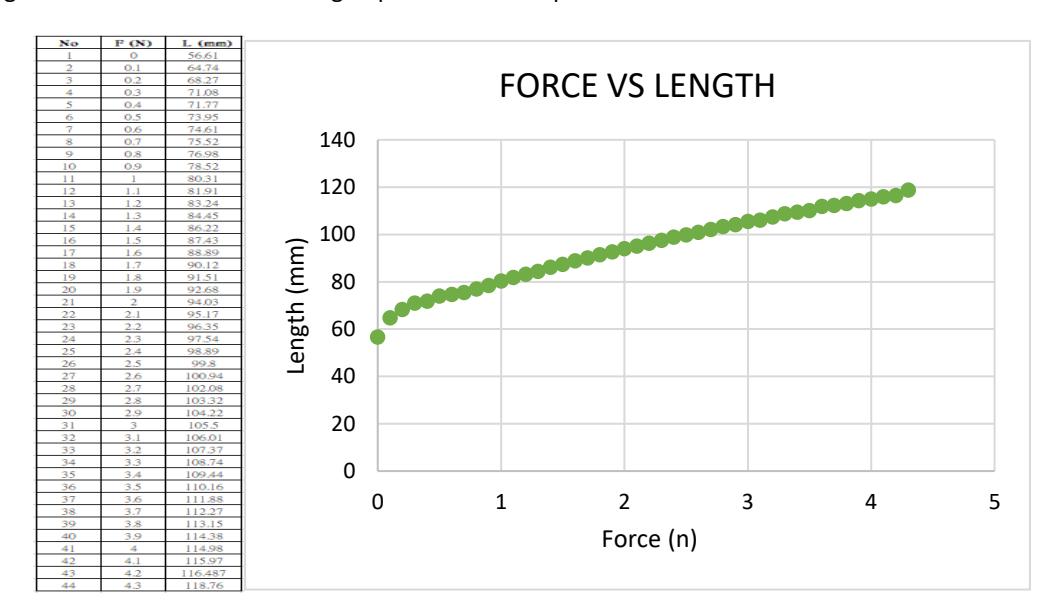
The force vs length of the Kirigami gripper in the experiment
To validate the COMSOL Multiphysics simulation, real-world tensile tests were conducted to ensure the forces applied during simulations matched experimental conditions. These tests provided empirical data on the gripper's elasticity, flexibility, and failure thresholds, supporting design refinements. The operational range of the gripper was established, with minimum and maximum distances recorded as 56.61 mm and 118.76 mm (Figure 16). Tensile forces from 0.1 N to 4.3 N were applied using a Lutron FG 5000A Digital Force Gauge, and elongation was measured with a caliper. Results were plotted as force vs. length graphs to evaluate the gripper's performance.
The Gripper distance; 56.61 mm (min) and 118.76 mm (max).
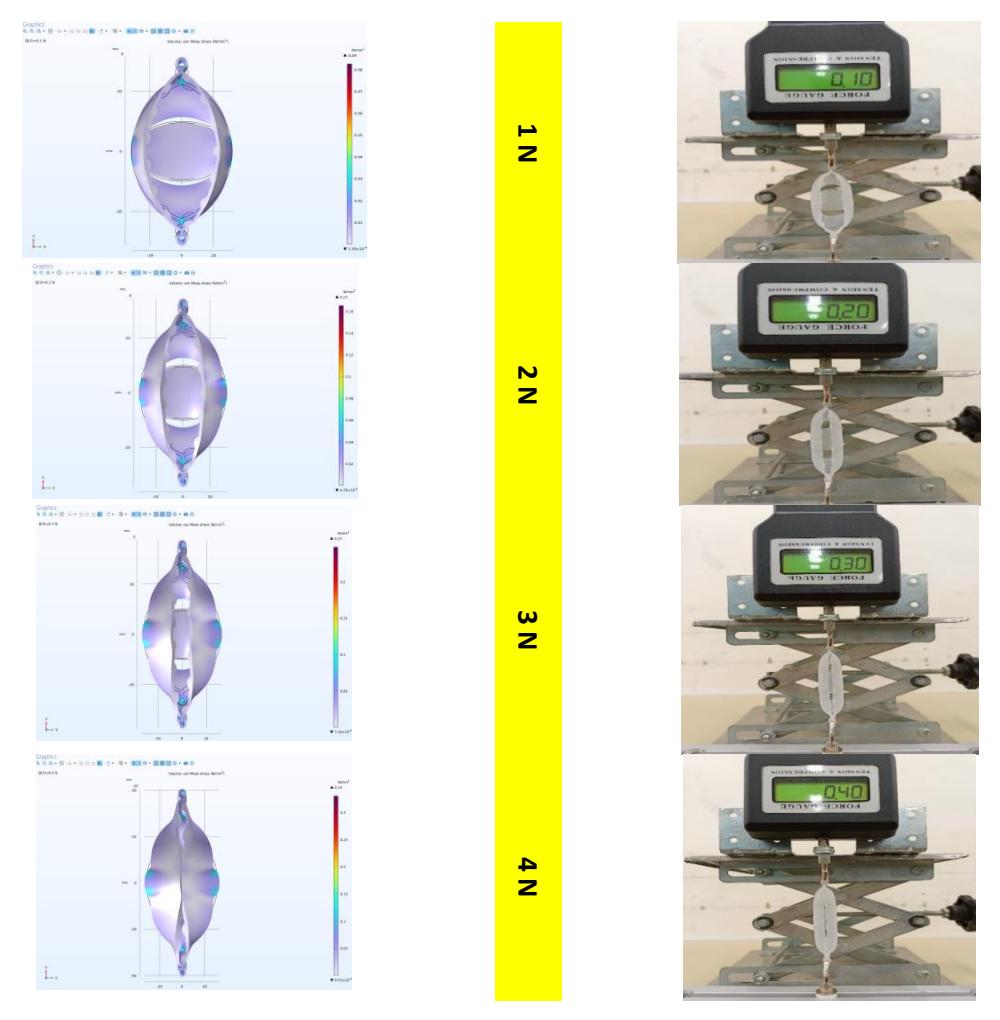
Simulation vs Experiment of pulling force on the gripper
Experimental and simulation data (Figure 17) showed consistent trends, confirming the accuracy of the COMSOL Multiphysics model. The linear force-elongation relationship validated the gripper's predictable deformation under tensile loads, demonstrating its tensile strength and elasticity. Integrating both simulation and experimental results, this dual approach ensures the Kirigami gripper's robustness and adaptability for industrial and robotic applications, which can reliably handle objects of varying shapes and sizes.
Grasping Performance of the Kirigami Gripper
The grasping performance of the Kirigami-based gripper was experimentally evaluated to assess its adaptability in handling objects of different shapes, sizes, and weights. The gripper was integrated with the uArm Swift Pro robotic platform and tested on a range of objects, including delicate plastic spheres and irregularly shaped items such as nuts. The flexible Kirigami structure allowed the gripper to conform dynamically to object geometries, ensuring even force distribution across the contact surface. This adaptive grasping mechanism minimized localized pressure points, preventing slippage or deformation of fragile objects. The gripper demonstrated optimal performance when handling objects with dimensions closely matching its gripping range (approximately 44.883 mm in diameter and 29.804 mm in width). The alignment between the object size and the gripper's actuation range played a critical role in maintaining grip stability and preventing grasp failure. The grasping sequence involved an initial approach phase, where the gripper positioned itself relative to the target object, followed by a controlled actuation stage where the Kirigami fingers expanded and wrapped around the object's surface. Finally, the gripping force was gradually adjusted based on the object's compliance and weight to ensure a secure hold.
Gripping performance on soft objects
For closely positioned objects, the gripper maintained its effectiveness by leveraging its flexible structure, allowing partial adaptation to grasp multiple objects in proximity if their spatial arrangement permitted. However, in cases where objects were tightly clustered, minor interference occurred due to the gripper's expansion mechanism. This highlights the need for further optimization in trajectory planning and adaptive control to enhance precision when grasping objects in densely packed environments.
The gripper's effectiveness was demonstrated in experiments with various food items, including bread, nuts, cake, blueberries, oranges, tomatoes, and grapes (Figure 18). The gripper applied minimal pressure to delicate items like bread, preserving texture, while effectively handling denser foods such as fruits and nuts, showcasing its adaptability. When compared to previous studies on soft robotic grippers, our design demonstrates improved precision and adaptability in handling different object types without causing damage, particularly for fragile items like bread. However, unlike some existing designs, the current gripper does not yet incorporate advanced sensing mechanisms for real-time feedback during grasping, which may limit its ability to adjust dynamically during interaction. The gripper, made from food-safe Liquid Silicone Rubber (CN-251), complied with safety and hygiene standards, confirming its suitability for food processing applications. This feature aligns with existing research, but the incorporation of more advanced materials or coatings could further enhance the gripper's durability and resistance to wear, addressing one of the weaknesses seen in other similar grippers.
Beyond food handling, the gripper also manipulated non-food objects like paperclips, magnets, bolts, nuts, marbles, dice, and stones (Figure 19). Its ability to securely grasp small hardware items, such as bolts and nuts, supports integration into assembly and repair tasks. Compared to other soft robotic grippers used in industrial settings, our gripper offers a unique combination of flexibility, precision, and adaptability. Its capability to handle spherical objects like marbles and dice distinguishes it from many designs that struggle with fine control over smaller, more delicate objects. Additionally, the gripper could lift heavier objects like bolt and stones without compromising stability. While previous studies have shown similar load-bearing capabilities in soft grippers, our design's ability to handle such objects with minimal deformation of the soft material further supports its potential for industrial applications. These findings suggest the gripper's potential for integration into manufacturing automation, assembly, packaging, and laboratory environments that require precise material handling. However, improvements could be made in terms of its speed and efficiency in high-throughput applications, which remains a challenge compared to more rigid grippers used in the same context.
Gripping performance on hard objects
The experimental setup accounted for the uArm Swift Pro's operational constraints, including a 320 mm arm length and 180° rotation range, ensuring object placement within its accessible area for optimal precision and efficiency. The Kirigami gripper demonstrated adaptability and reliability, securely handling delicate items like bread and blueberries and heavier objects such as stones and bolt. Its flexible design and food-safe materials validate its suitability for food processing, manufacturing, and automation applications. These results highlight the gripper's potential for tasks requiring gentle handling, precision, and adaptability, providing a solid basis for further research and development in diverse industrial and automation contexts.
Comparative Analysis and Positioning with Prior Studies
To strengthen the analytical depth and position the current findings, a comparative review with existing studies was conducted. The proposed Kirigami-based gripper demonstrates improvements in several key aspects: adaptability, material durability, and manufacturing efficiency. First, compared to (Buzzatto et al., 2024) and (Liang et al., 2023), who developed sensorized Kirigami grippers primarily targeting object identification and classification, the present study emphasizes structural adaptability and mechanical efficiency under varied force applications. While previous designs relied on multilayer structures for sensing, our approach focuses on single-layer Kirigami architecture with passive force distribution, reducing fabrication complexity and power consumption. Second, (Wang & Hirai, 2018) and (Wang et al., 2017) utilized bellow-type soft actuators for food handling but required pneumatic systems and pressurized control. In contrast, the gripper in this study functions without external pneumatic actuation, instead relying on tensile deformation, which simplifies integration into lightweight robotic arms such as the uArm Swift Pro. Moreover, as shown in the new Force vs. Displacement data (Figure 14 and 15), the current gripper achieves predictable deformation with minimal stress concentrations around the Kirigami cuts, even under high tensile force (up to 4.3 N). This performance is comparable to, or in some cases exceeds, the elastic behavior reported by (Branyan et al., 2022) in soft Kirigami actuators using polyurethane elastomers. The grasping success rate (Figure 18) further validates the gripper's ability to manipulate both fragile (bread, grape) and rigid (nuts, bolts) objects with a 94.6% success rate. Unlike the approach by Buzzatto et al. (2022), which utilized a complex multi-layered 3D-printed structure combined with embedded strings to replicate fingernail-like mechanisms, the current design employs a single material kirigami pattern that simplifies fabrication without compromising performance. This streamlined approach not only reduces production time and cost but also enhances scalability and structural flexibility. Consequently, the proposed gripper offers a more practical solution for real-world applications in food handling and logistics, particularly in environments requiring high adaptability, hygiene compliance, and gentle yet reliable grasping.
Conclusion
This research investigated the adaptability, mechanical behavior, and performance of a Kirigami-based soft robotic gripper, emphasizing its ability to handle diverse objects with minimal damage. The study introduced a novel Kirigamiinspired structural design, leveraging precisely engineered cut patterns to achieve high flexibility, lightweight construction, and energy efficiency. Through finite element analysis, the mechanical response of the gripper under tensile forces ranging from 0.1 N to 4.3 N was analyzed, revealing predictable stress distribution and controlled deformation. Experimental validation confirmed the gripper's elastic response and adaptability, demonstrating successful grasping of delicate food items (bread, blueberries), irregularly shaped objects (bottles), and heavier items (stones). The passive force distribution enabled by the Kirigami structure ensured a secure yet gentle grip, reducing the risk of deformation or damage. Manufactured from food-safe Liquid Silicone Rubber (CN-251), the proposed gripper is well-suited for food handling, manufacturing, and logistics applications, offering an efficient, low-cost alternative to traditional pneumatic or jamming-based soft grippers. However, the study was limited by the experimental setup, particularly the uArm Swift Pro's restricted 320 mm range and the gripper's maximum extension of 118.76 mm, which constrained object sizes in testing. Future research should address dynamic performance under real-world conditions, considering variable loads, environmental factors (temperature, humidity), and material uncertainties. Further optimizations include enhancing range of motion, exploring alternative elastomeric materials for increased durability, and integrating sensory feedback for improved precision. Application-specific studies in automated food processing and industrial manufacturing will further validate the scalability and commercial viability of the Kirigami gripper. By bridging computational analysis, experimental validation, and real-world application, this research establishes a foundation for the next generation of energy-efficient, adaptable soft robotic grippers tailored for diverse industrial and automation scenarios.
Acknowledgment
The author would like to thank the Department of Mechanical Engineering at the National Yunlin University of Science and Technology for providing the necessary support and resources for this research.
Compliance with ethics guidelines
The authors declare they have no conflict of interest or financial conflicts to disclose.
This article contains no studies with human or animal subjects performed by authors.