
Introduction
Rice is the staple food of Indonesian society, so that rice cultivation is the main livelihood of farmers as an activity to ensure food security. Several researchers have made various efforts to increase rice productivity and minimize crop failure. One of them is controlling pests and diseases in rice plants. Insect pests and diseases take nutrients from rice plants starting from leaves and other plant tissues to reproduce. This causes rice plants to be damaged so that over time they do not develop and will die. Insect pests that attack rice plants include Chlorops sp., Oxya sp., Recilia sp., Dolycorus sp., Cnaphalocrocis sp., Cofana spectra, Stenodema sp., Phyllotreta sp., Anacridium sp., Nephotettix sp., Scotinophara sp., Orseolia sp., Leptocorisa sp., Chilo sp., Paraecosmetus sp., Parnara sp. (Lengkong et al., 2024). Chemical pest control methods commonly used by farmers are pesticides and insecticides because of their low cost, high efficiency and simple application. The long-term use of chemical pesticides and insecticides has significant negative impacts, including adverse effects on human health, environmental pollution, and the emergence of resistant pest species. Organic pesticides have begun to be developed in controlling insect pests and diseases. Natural pesticides derived from lemongrass have been shown to reduce populations of insect pests in rice plants, including brown planthoppers, grasshoppers, lady beetles, aphids, and others (Telaumbanua et al., 2021). The use of these natural pesticides must be applied periodically to obtain optimal results.
Public awareness is increasing about the side effects of using pesticides and chemical insecticides, thus giving rise to other alternative controls such as biological, physical and mechanical. Biological control of plant pests is a safe
Copyright ©2025 Published by IRCS - ITB J. Eng. Technol. Sci. Vol. 57, No. 4, 2025, 492-504 ISSN: 2337-5779 DOI: 10.5614/j.eng.technol.sci.2025.57.4.5
method by utilizing natural enemies or pest predators but requires a long period of time so it is less effective (Ilham et al., 2018). Physical control of insect pests aims to limit pest access to plants by changing behavior, killing insects, damaging the physiological functions of the pest's body and changing the environment to be intolerable to insects. Some physical control methods include heat or cold treatment, irradiation, light and sound regulation (Vincent et al., 2003; Yadav et al., 2020). Mechanical control aims to control insect pests, change the environmental habitat and limit development carried out using devices and machines (Omkar, 2018). Some mechanical control methods are by hand control, insect suction devices, traps, insect collection equipment, crushing, grinding, and other mechanical methods (Reddy et al., 2010).
Insect pest traps are a popular insect control method for controlling insect pests on various plants. Several types of insect pest traps include pheromone traps, bait traps, suction traps, and others. Diurnal insects are generally attracted to light sources at night, however, artificial lighting is less efficient and effective for pest control during daytime due to the high intensity of sunlight (Shimoda et al., 2013). Light traps represent one of the techniques commonly employed to attract insects (Gonzales et al., 2016). Various light trap models have been engineered using either incandescent or UV lamps (Gaglio et al., 2017), and more recently, light-emitting diodes (LEDs) (Silva et al., 2016). Insects can detect and respond to light wavelengths ranging from 300 to 650 nm, covering the ultraviolet to red portions of the light spectrum. Pheromone traps are able to monitor, capture and control several insect pests such as pink cottonworms, gypsy moths, gray cotton beetles, pine beetles and fruit flies. In addition, the attraction of insects to different colors is utilized by using adhesive color traps (Ranamukhaarachchi & Wickramarachchi, 2007). The use of yellow sticky traps is an effective method for managing populations of leafhoppers, aphids, whiteflies, thrips, and leaf miner flies on a variety of plants (Esker et al., 2004; Mainali & Lim, 2010).
Technological advances have developed from manual traps to automatic insect traps using intelligent microcontroller systems with various sensors. Research on automatic insect pest traps has been developed on various plants. Automatic insect traps equipped with E18-D50NK infrared sensors and attractants demonstrated a capture accuracy of 82.74% and reduced the use of spray pesticides by 20–50% in cocoa plantations (Telaumbanua et al., 2021). Automatic insect pest trap technology on cucumber plants using solar power, yellow LED bait and E18-D50NK infrared sensors has an effectiveness of catching insect pests of 80.87% (Telaumbanua et al., 2022). The types of insect pests differ in various plants so that different traps and designs are also needed. Controlling insect pests on rice plants requires various combinations of traps such as yellow adhesives, pheromones, ultraviolet lights, white lights so that insect pests are attracted to the trap both day and night with a wider range of insect pest types. This system has low operational costs by using solar panels as an energy source so that the trap can work for 24 hours in rice fields. The objective of this study is to develop an automatic insect pest trap for rice cultivation that is effective, efficient, affordable, durable, safe, environmentally friendly (zero emissions), and low in operational cost.
Materials and Methods
Time and Place of Research
This study was carried out from May to August 2024 at the Agricultural Machinery and Equipment Laboratory, Department of Agricultural Engineering, Faculty of Agriculture, University of Lampung and Sukoharjo 1 (-5.318260, 104.967173) Pringsewu Regency, Lampung Province.
Tools and Materials
This study employed various tools and equipment, such as AutoCAD, Arduino software, laptop, drill, welding machine, grinder, soldering iron, glue gun, and hacksaw. The materials utilized in this study include a solar panel, battery, solar charge controller, inverter, Arduino Mega 2560 and its shield, relay, E18-D50NK infrared sensor, Real Time Clock (RTC), Liquid Crystal Display (LCD), white and yellow LEDs, fan, pheromone, cables, glue, acrylic sheet, aluminum, angle iron, and iron poles.
Design and Mechanism
This study was conducted to test the tool and the results of the effectiveness of the tool. Testing of insect traps includes the stability and accuracy of the automatic insect trap. Testing the effectiveness of the tool on the number of insect catches using a variety of baits consisting of pheromones, yellow LEDs, white LEDs, and complete traps. The sizes of the insects observed were 0.1 cm, 0.5 cm and 1 cm. This rice plant pest insect trap is designed to be able to attract, catch, count, and dispose of insects automatically. Trapped insects will die in the insect collection box containing detergent water and will circulate automatically every morning. The power used comes from solar panels. This trap is able to catch pest insects on rice plants such as stem borers, planthoppers, whiteflies, stink bugs, and other rice pest insects in large numbers. The insect pest trap framework comprises multiple elements, such as the insect collection box, main trap frame, control unit housing, power supply box, solar panel holder, support structure, water channel, and storage tank. Each part of this insect trap tool is installed based on the structural and functional design plan. The control system is in the form of a tool that functions to automatically control the insect trap by integrating a microcontroller with nine infrared sensors (Figure 1). The sensor serves to detect the presence of insect pests. In addition, the microcontroller functions to send commands to the relay in order to activate actuators such as the fan and water pump. The fan functions to direct insects into the collection box, while the water pump circulates water within the insect collection box. The insect bait used was white LED, yellow LED, ultraviolet, and automatic pheromone. The lamp used had a lighting range of 1000-2100 lumens with a wavelength of 450-500 nanometers. The lighting period was 14 hours from 16.00-06.00 with a light distance from the base of the plant of around 1.2 m and a light distance from the field of around 1.85 m. The pheromones used are Fero-GER to attract the arrival of yellow rice stem borers and Fero-Grayak to attract the arrival of armyworm larvae. The design of the structural circuit of the pest trap can be seen in (Figure 2).
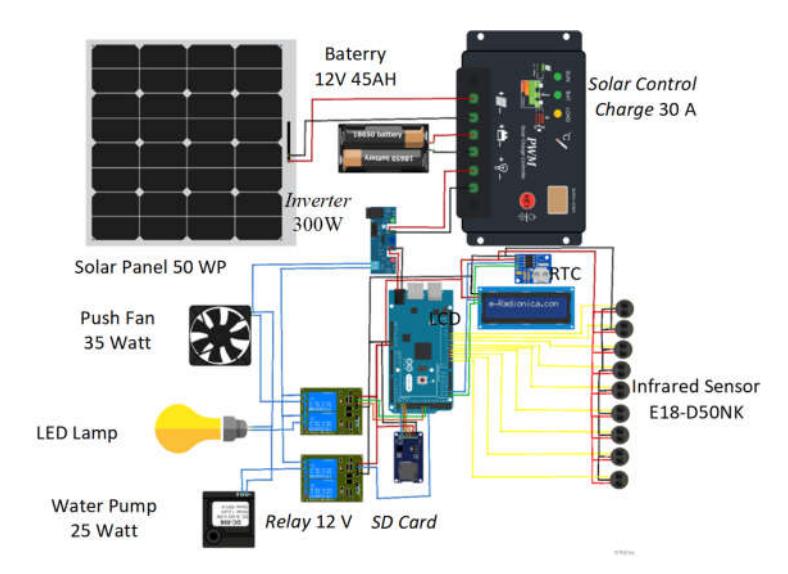
Schematic design of the control and power supply system.
The microcontroller activates the relay system to automatically operate the attractants, which include ultraviolet lights, white lights, yellow adhesive surfaces, and pheromones. The system functions continuously over a 24-hour period, with the lights operating between 16:00 and 06:00, whereas the yellow adhesive, ultraviolet light, and pheromone attractants remain active during daylight hours. Insects that are responsive to light, yellow adhesive surfaces, and pheromones are drawn toward the trap, allowing them to be detected by the E18-D50NK infrared sensor. The microcontroller triggers the relay to activate the fan, thereby directing the insects into the collection box. Insects enter through the cone-shaped trap channel, which prevents them from escaping. The trapped insects are directed into the collection box, which contains water. Between 07:15 and 07:30, the microcontroller activates the relay to operate the water pump, filling the collection box with water. Insects that have been trapped will be removed automatically by the filtering system. After reaching the set point, the microcontroller disables the relay, thereby halting the water pump's operation. The number of insects captured by the trap will be monitored and recorded.
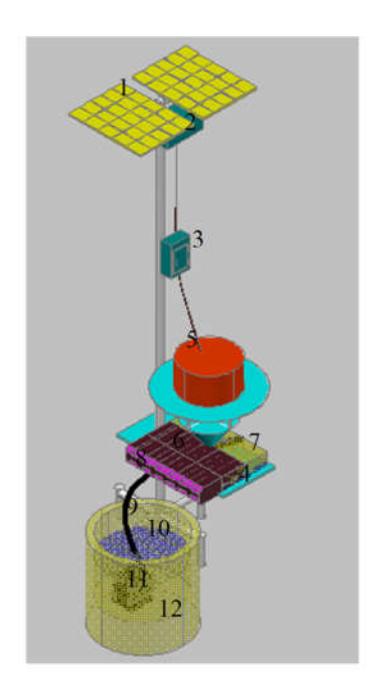
- 1. Solar Panel
- 2. Power Supply Box
- 3. Automatic Control Box
- Bottom Infrared Sensor Main Tran Halden
- 5. Main Trap Holder
- Support Pole Insect Collector Box
- 8. Filter Cloth
- 9. Water Hose
- 10. Detergent Water
- 11. Water Pump
- 12. Water Tank
- 13. Push Fan
- 14. Top Infrared Sensor
- 15. Yellow LED
- 16. Pheromone
- 17. White LED
- 18. Collector Water
Figure 2 Design of a rice plant pest insect trap.
Observation Parameters
Observations were conducted for 30 days in rice fields by measuring several parameters consisting of types of rice plant insects trapped in automatic pest traps, insect attraction to different lures, average insect dropping time, stability and effectiveness of insect capture:
1. Insect Capture Effectiveness
The calculation of the effectiveness of insect capture aims to determine the percentage value of the effectiveness of insect capture. This calculation is done by counting insects that come to the insect pest trap and insects that die in the insect collection box. The calculation method uses Eq. (1).
\[Ep = \frac{So}{Si} \times 100\% \tag{1}\]
Ep refers to the effectiveness of insect capture, expressed as a percentage. So denotes the number of dead insects counted manually, while Si represents the number of insects arriving as recorded by the sensor.
2. Average Time of Insect Drop
The average insect fall time indicates the responsiveness and efficiency of the device in detecting and managing the presence of insects. This analysis aims to determine the time required by the pest trap system to drop insects into the insect collection box.
\[RWP = \frac{\sum_{i=1}^{n} (Aon\ i + Delay)}{n}\] (2)
RWP refers to the average insect dropping time, measured in minutes. Aon i denotes the actuator on time for the i-th instance, also measured in minutes. Delay represents the waiting time in minutes, and n indicates the number of data points.
3. The Determination Coefficient (R²) is obtained from a scatter graph of observation values and predicted values in Microsoft Excel 2010. The graph is added with a treadline and then the linear regression type is selected so that it displays the value (R²).
RMSE = \[[n^{-1}\sum_{i=1}^{n}(x_i - y_i)^2]^{\frac{1}{2}}\] (3)
RRMSE = \[\frac{\left[n^{-1}\sum_{i=1}^{n} (x_i - y_i)^2\right]^{\frac{1}{2}}}{\sum_{i=1}^{n} y_i^2} \times 100\%\] (4)
N represents the number of data points. X denotes the i-th observation value, while Y refers to the i-th predicted value.
In this study, data on rice pest insect catches were calculated every day. The data analysis results are based on the evaluation of the coefficient of determination (R<sup>2</sup>), the correlation coefficient, and the Relative Root Mean Square Error (RRMSE). The data obtained will be processed in Microsoft Excel 2010 and displayed in graphical form.
Results
Tool Design
The insect pest trap system is composed of three primary components, the power supply system, the control system, and the main structure of the pest trap (Figure 3). The power supply system comprises components that serve as energy sources for operating the pest trap. The power supply section includes a battery, an inverter, and a solar charge controller. The energy used to operate the trap is sourced from solar panels. The control system comprises components responsible for managing and regulating the operation of the device. The control system comprises a 3A adapter, SD card reader, 12V relay, Liquid Crystal Display (LCD), Real Time Clock (RTC), Arduino Mega shield, and Arduino Mega 2560 microcontroller. The control box is installed 2.5 meters above the ground to ensure proper system operation and protection. The main structure of the pest trap serves to capture and eliminate insects that have been attracted and drawn into the device. This primary component of the pest trap includes nine E18-D50NK infrared sensors, actuating devices such as fans and water pumps, along with attractants consisting of LED lighting, yellow sticky traps, and pheromone lures. The pest trap component is installed 1 meter off the ground.
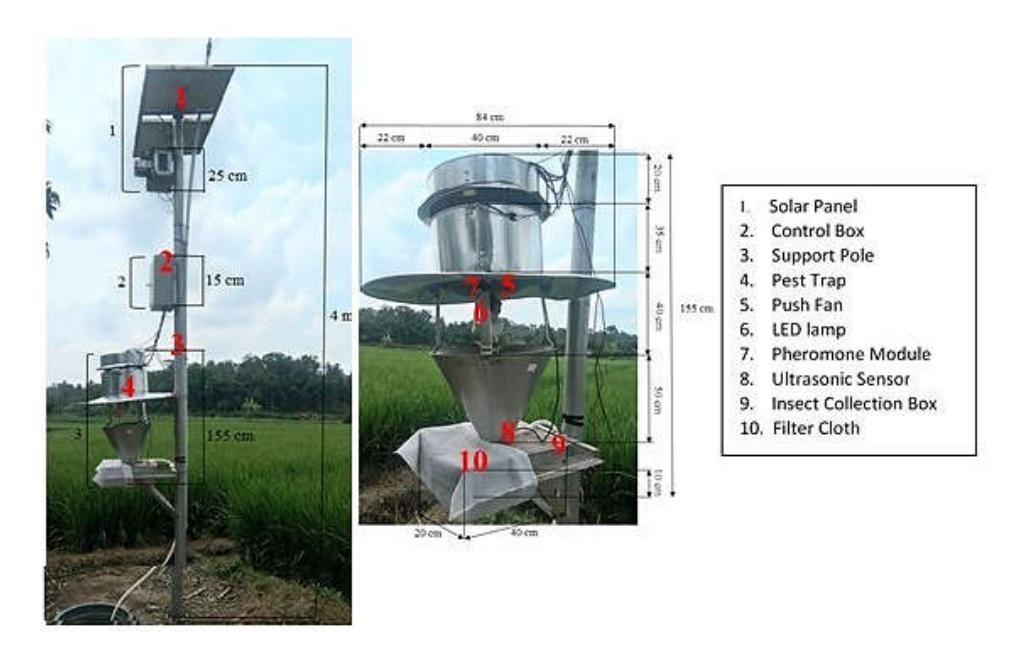
Figure 3 Automatic insect trapping system.
Percentage and Types of Insects Caught
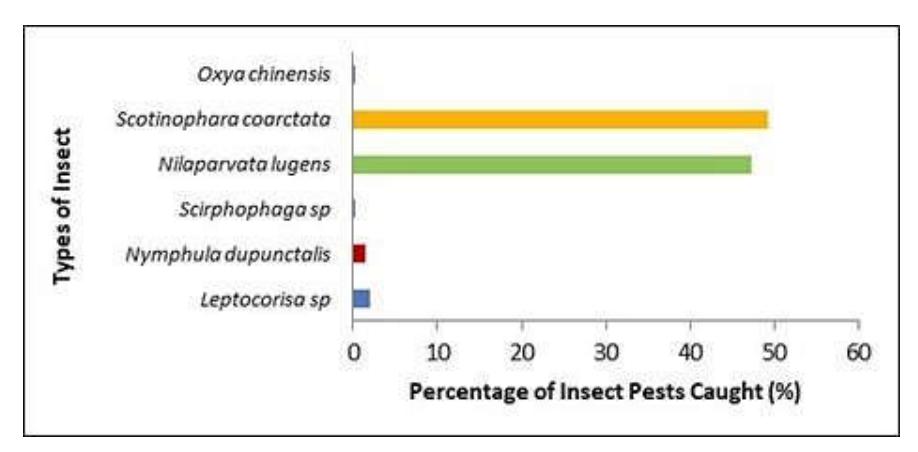
Insects found on rice plants are grouped into 2 types, namely pest insects and predator insects. Some of the largest pest insects that attack rice plants at the research location of Sukoharjo I Village, Pringsewu, Lampung are Oxya chinensis, Sctinophara coarctata, Nilaparvata lugens, Scirpophaga sp, Nymphula depunctalis and Leptocoriza
sp. Figure 4 presents the number of pest insects captured using the automatic pest trap. In addition to pest insects, several other insects were also found that act as predator insects (Figure 5). These pest and predator insects are attracted to automatic insect traps equipped with white LED, yellow LEDs and pheromones. The number of insects for 30 days or 1 month caught using automatic traps was 19,449. The trap captured 10,908 pest insects and 6,906 beneficial predatory insects. While insects that are not included in pests and predators are 1,640.
Percentage of insect types on rice plants.

Insects caught in automatic traps.
Accuracy of Traps Against Number of Detections and Number Caught
The automatic pest trap installed in the rice field for a duration of 30 days recorded data as follows, 24,458 insects were detected approaching the trap by the sensor, 20,104 insects were recorded entering the trap, and 19,449 dead insects were counted manually (Figure 6). Automatic insect traps with lights were able to attract 4,746 incoming insects, while 3,632 insects entered and 3,792 insects died. Automatic insect traps with pheromones were able to attract 1,293 incoming insects, while 1,357 insects entered and 1,053 insects died.
The graph in Figure 7 (a) shows that the determination value (R2 ) in the regression equation of the incoming insect sensor reading and the incoming insect sensor is 0.9155. Meanwhile, the correlation coefficient value in the regression equation is 0.78. This shows that the correlation between variable X and variable Y has a high correlation. The graph in Figure 7 (b) shows that the determination value (R2 ) of the regression equation between the readings of the incoming insect sensor and the dead insects is 0.9733. The RRMSE value obtained from the observation data is 17.6%. The RRMSE value indicates that there is a low average error between the number of insects detected by the incoming sensor and the number of dead insects.
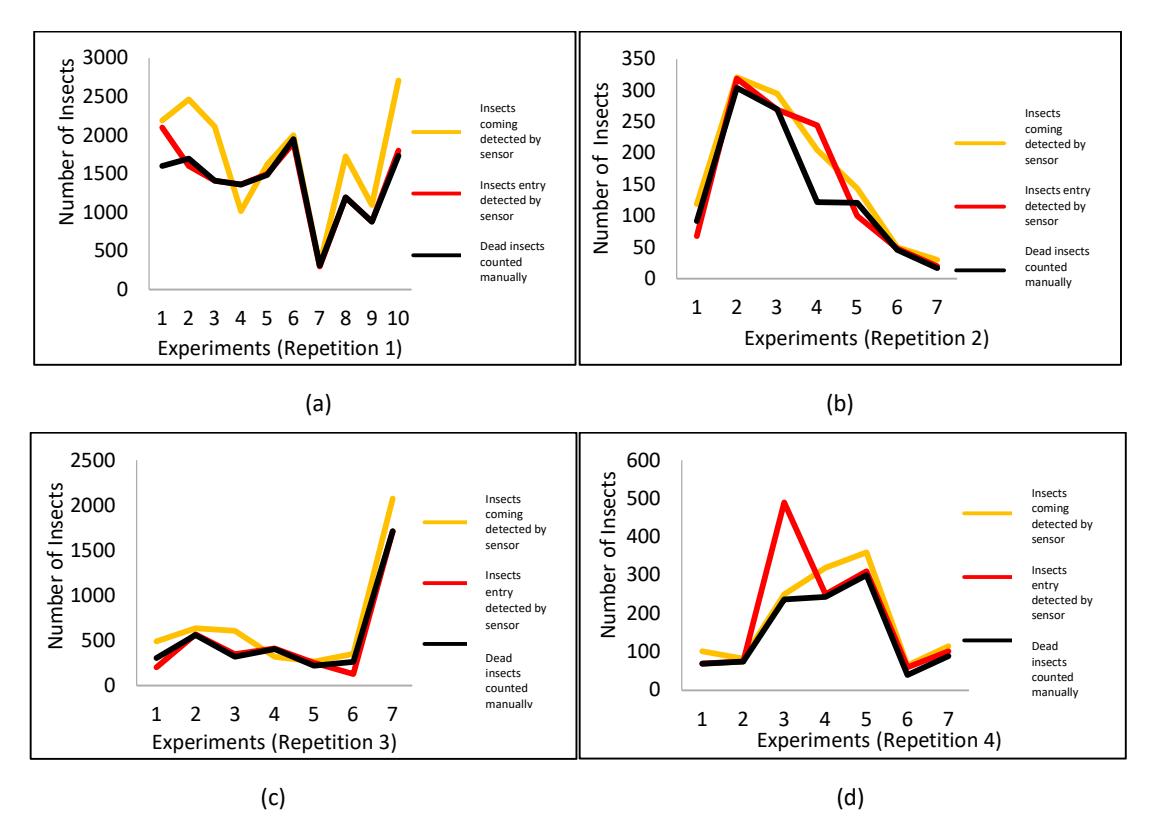
Figure 6 Observation of insects on rice plants using a complete automatic insect trap (a), yellow LED (b), white LED (c) and pheromone (d).
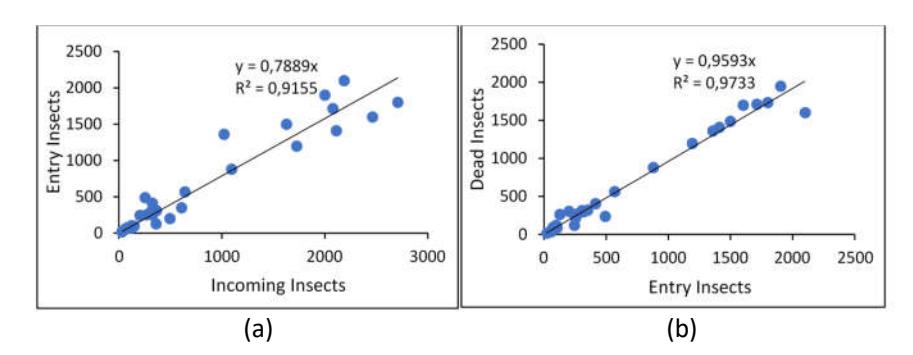
Figure 7 Regression equation of incoming insect sensor reading and insect entry sensor reading (a) and regression equation of incoming insects and dead insects (b).
Average Time of Insect Drop
Diurnal pest insects are active in the morning to find food, find hosts and mates and reproduce. Observation of the average time of insect drop aims to determine the speed of incoming insect drop, so that the length of time required by the device to drop insects into the insect collection box can be determined. This analysis was carried out using data on the time of insect arrival and data on the time of insect entry that had been stored in the micro SD. From the calculation results, the average speed of insect falling was 1 minute 4 seconds.
Stability
Stability refers to the device's capability to deliver consistent performance over an extended period. The performance of the insect pest control device is to determine the reading of incoming insects and drop them into the insect collection box. The performance of the device in dropping these insects makes the device suitable for use. If the performance of the device is in a stable condition, then the detected incoming insect pests will be pushed into the insect collection box by the fan on the upper insect trap. Figure 8 indicates that the number of insect pests detected by the sensor exceeds the number of insects successfully trapped.

Stability of tool performance.
Insect Capture Effectiveness
Analysis of the effectiveness of the tool on the number of insects captured aims to determine the effectiveness value of the tool in handling insects that are attracted. The effectiveness of insect pest capture is assessed by comparing the number of insects detected by the infrared sensor with the number of dead insects recorded. Insect readings by the infrared sensor will be displayed on the Liquid Crystal Display (LCD). The observation of captured insect pests on rice plants is conducted in the morning, following the completion of water circulation by the pump in the insect collection box. Based on Figure 9, insect catching using automatic traps with yellow LED was carried out for seven days with a capture effectiveness of 79.39%.
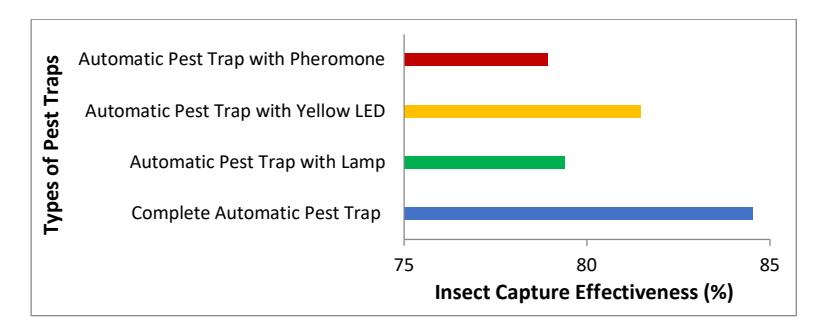
Effectiveness of insect capture in automatic pest traps.
Discussion
Pest insects start to attack rice plants in the vegetative phase to the growth phase, but if control is not good, it has the potential to reduce rice plant productivity (Litsinger et al., 2013). There are two types of pest insects with the largest population, each reaching almost 50%, namely brown planthoppers (Nilaparvata lugens) and rice black bug (Scotinophara coarctata). Both types of insects are caught using automatic pest insect traps that are installed for 30 days in rice fields. Brown planthoppers (Nilaparvata lugens) attack rice plants by sucking fluids and damaging the stems of rice plants so that the stems wilt and then dry out. The ability to spread this insect pest is high so that it can cause a decrease in harvest production to crop failure. Adult brown planthoppers are attracted to light at night and pheromones (Hani & Santoso, 2018). This attraction is a phototactic property of insects. This pest is very attracted to white light (Pinandita, 2014). Rice black bug (Scotinophara coarcata) are pest insects that suck the sap of rice plants so that when the rice plants are badly attacked, they will change color to yellow-brown and then die, causing symptoms of aphid burn. This pest attacking rice plant especially during generative phase. These insects are light-attracted and predominantly active during nighttime hours (Leena et al., 2024). Yellow rice stem borer (Scirphopaga sp.) can reduce quantity and quality of paddy production. This pest attacks rice plant in vegetative phase causing deadhearts symptons with characterized by dead tillers and generative phase until one month after harvest causing whiteheads with characterized by empty or unfilled grain. The average rice stem borer larvae tend to be in the base of the rice stem (Anwar et al., 2024). This insect pest is attracted to night light and pheromones. Slender rice bug (Leptocorisa sp.) is a pest that feeds on developing rice grains, starting from the flowering phase when the panicle opens from the base to the end of the ripening phase, which makes it susceptible to indirect yield losses (Ponijan et al., 2023). Rice caseworm (Nymphula depunctalis) attack rice plants in the vegetative phase. The larvae will eat rice leaves and cut the leaves to wrap themselves on the leaf blade. This causes leaf damage so that growth is inhibited and then the plant dies (Patel et al., 2024). Rice grasshopper (Oxya chinensis) is an insect pest that eats rice plant leaves, reducing the leaf surface area and disrupting physiological functions. Grasshoppers are attracted to light from a distance so they will fly closer to the light source. According to Leksono et al. (2022), Oxya sp is among the insect pests that damage rice plants throughout both the wet and dry seasons.
Insect eyes have photoreceptor cells that are sensitive to light at a certain wavelength spectrum up to ultraviolet. Insects can respond to light ranges with wavelengths of 350-700nm (Shimoda & Honda, 2013). Phototactic behavior in insects can be utilized in designing light traps (Kim et al, 2019). The white light source functions as a substitute for sunlight at night so that insects are more attracted to the light lure in automatic pest insect traps than yellow LEDs. Automatic insect traps with yellow LEDs were able to attract 1,164 incoming insects, while 1,068 insects entered and 972 insects died. Light-emitting diodes (LEDs) are characterized by high luminous efficiency, low energy consumption, long lifespan, lightweight design, environmental friendliness, and safety for plant growth (Zhang et al., 2020). Specific wavelengths and light intensities emitted by LEDs have the ability to attract particular insect species (Gao et al., 2017). Yellow LEDs have a wavelength of 565-590 nm (Bruno & Svoronos, 2005). Research Santi et al., (2023) shows that leafhoppers are attracted to yellow, red and green colors. Different leafhopper species have varying color preferences in the wavelength spectrum and RGB values.
Pheromones are chemicals that can modify insect behavior, especially sex pheromones in pest control (Tewari et al., 2014). Synthetic sex pheromones can reduce the number of male insects so that reproduction is disrupted and the population decreases (Suckling et al., 2015; Nahar et al., 2024). Controlling insect pests using pheromones can control Lepidoptera, Coleoptera and Diptera species (Witzgall et al., 2010). Automatic insect traps with complete lures in the form of white LED, yellow LEDs and pheromones can attract more insects to come, totaling 17,253, while 14,047 insects entered and 13,632 insects died. This combination of various insect lures has been widely developed as an effort to control environmentally friendly insects effectively. Different types of insects can be attracted to each different lure so that the number of insects that come is higher. Research Reddy et al. (2011) used a combination of pheromones and brown lures to control the population of Rhabdoscelus obscurus pests on sugar cane, coconut and ornamental palms.
This automatic insect pest trap for rice plants is equipped with various sensors. The E18-D50NK infrared sensors are positioned at both the upper and lower sections of the insect pest trap to detect insects approaching the device and those entering the insect collection box. The E18-D80NK infrared sensor embedded in the automatic pest trap can detect insect pests measuring 0.5cm-1 cm with an accuracy of 93-100% (Telaumbanua et al., 2022). This sensor provides digital output when the sensor detects something within a certain distance (Pranata, 2016). This study used three different sizes, namely 1 cm, 0.5 cm, and 0.1 cm. The selection of this variation size refers to the size of the insect which can reach 1 cm and the minimum limit of the E18-D50NK infrared sensor reading is 0.09 cm. The highest infrared sensor reading effectiveness is 100% when the insect size of 1 cm is passed through the sensor. When an object measuring 0.1 cm is passed through the E18-D50NK infrared sensor, the effectiveness of the sensor reading is still low at 44.44%. The larger the size of the insect that passes through the infrared sensor, the greater the effectiveness of the sensor reading. The reading of insect observation values aims to determine the number of insects that come to the trap, enter the insect collection box, and dead insects (Figure 6).
The coefficient of determination in the tool has a very strong relationship (Figure 7a). An R² value is considered satisfactory when it is close to 1, indicating that the predicted values closely align with the observed measurement data (Telaumbanua et al., 2024; Dwicahyo et al., 2017). The RRMSE value obtained is 44.09%. The RRMSE value between the sensor reading of incoming insects and the actual entries indicates a relatively high average error. The cause of the large error value between the reading sensor and the incoming insects is because not all insects that come will enter the tool. The number of trapped insects recorded by the sensor is higher than that detected by the detection sensor, as insects typically arrive in swarms and are therefore only registered as a group rather than individually (Telaumbanua et al., 2021). Based on the graph 7b, there is only a minor discrepancy between the readings obtained from the incoming insect sensor (variable X) and the manually recorded number of dead insects (variable Y). The data indicate that the readings from the incoming insect sensor exhibit a low error margin. The correlation coefficient is 0.96, which signifies a strong correlation and is nearly equivalent to a perfect correlation value of 1 (Irawan et al., 2020). The number of dead insects is lower than the number detected by the sensor due to the sensor's high sensitivity, which allows it to detect even very small-sized insects. In addition, the presence of insects that make nests around the incoming sensor such as spiders, causes the incoming sensor to detect insects.
The stability of performance parameters plays a crucial role in evaluating control systems, as it helps determine whether the equipment's performance remains consistent over an extended period (Telaumbanua et al., 2024). The results of the insect sensor readings and the performance of the automatic insect trap in dropping insects can be said to be stable. This is because the sensor reading results reach or exceed the setting point (Mufidat et al., 2023). The more insects that come are detected but not all of them can be dropped in the insect collection box. The automatic insect pest trap on each lure is more stable than the complete lure. Sensor stability refers to the sensor's ability to maintain accurate performance, with any variations in the results generally attributed to external factors such as temperature, air conditions, and humidity (Puspasari et al., 2020). This discrepancy is attributed to the fact that some insects do not fall into the collection box but manage to escape the trap, and their ability to evade capture varies due to differences in flight power and maneuverability (Telaumbanua et al., 2022). These insects require high light intensity when active at 08.00-11.00 am. Observation data obtained were calculated using the equation according to Pranata (2016) with the total time the actuator was on and the waiting time was 7748 seconds and the number of data (n) was 88. The average speed of insect falling in this study was faster than the average time for insects to fall into pest traps with yellow LEDs, which was 1 minute 40 seconds (Telaumbanua et al., 2022).
The results of the effectiveness of this tool are close to the study Telaumbanua et al. (2022) using automatic pest traps using yellow LED lures of 80.87%. This trap system is assembled using yellow LEDs with E18D50NK infrared sensor integration and a fan using a microcontroller. Insect catching using automatic traps with light lures was carried out for seven days with a capture effectiveness of 81.48%. Meanwhile, insect catching using automatic traps with pheromone lures was carried out for seven days with a capture effectiveness of 78.90%. The use of one type of lure in an automatic trap can only attract insects that are sensitive to the lures attached to the tool so that fewer insects will be caught. Insect catching using automatic traps with complete lures was carried out for ten days and had a capture effectiveness of 84.47%. The use of three types of lures simultaneously in an automatic trap causes more insects to be caught because insects that are sensitive to light, pheromone lures, and yellow will approach the tool. In addition, weather conditions also affect insect catching. Insects fly actively during cloudy and sunny weather, while in rainy weather insects are not very active in flying because rainwater causes insect wings to get wet and even damages the wings (Morshed et al., 2023).
Conclusion
Automatic insect pest trap for rice plants has been designed based on structural and functional design. The design result of automatic insect pest trap for rice plants has components such as E18-D50NK sensor, fan, water pump, and insect lure (white LED, yellow LED, and pheromone). The structural frame of the pest trap has an overall height of 155 cm, with the collection chamber measuring 40 cm in both diameter and height. The types of insect pests that are most often caught are Scotinophara coarctata and Nilaparvata lugens. The automatic pest trap deployed in the rice field for a period of 30 days recorded data indicating that the number of incoming insects detected by the sensor was 24,458, the number of insects entering the trap detected by the sensor was 20,104, and the number of dead insects manually counted totaled 19,449. The average duration for an insect to fall into the collection chamber is approximately 1 minute and 4 seconds. The device demonstrates stable performance, as indicated by the linear correlation between the number of incoming insects and the number of dead insects shown in the graph. The effectiveness of automatic pest trap insect catching with complete lures is the highest at 84.47%.
Acknowledgment
The author would like to thank the University of Lampung, especially the Department of Agricultural Engineering, Faculty of Agriculture, which has provided support in completing the research.
Compliance with ethics guidelines
The authors declare they have no conflict of interest or financial conflicts to disclose. This article contains no studies with human or animal subjects performed by authors