
1 Introduction
VANETs are an essential technology to support the linking of users, pathways and vehicles in intelligent transport systems (ITS) via Global Positioning System (GPS), Geographic Information System (GIS), sensors, and so on. The purposes of ITS are separated into three categories: pathway privacy, traffic efficacy, and information facility [1-2]. These networks deal with real-time transfers via vehicle-to-vehicle (V2V) transfer and vehicle-to-roadside (V2R) transfer for such purposes. Also, V2V transfer only requires on-board units (OBUs), whereas roadside units (RSUs) are necessary for V2R transfer, which are extremely costly; thus, building administrations are inclined to limit their quantity, particularly in the surroundings [3-4]. Furthermore, V2V is ideal in crisis conditions where traditional broadcasting structures and RSUs are colliding. Thus, V2V is more flexible compared to V2I in execution.
Information created for such purposes can cause traffic congestion, data leakage, and end-to-end latency. The system information is partitioned into normal and time-critical EMs that ought to be handled with the least latency to the destination. When crisis measures exist, the EMs should be delivered to the destination vehicle before a specified time limit. The amount of multimedia data transferred between the rule administration support and emergency case units is significant. Consequently, the major difficulty in using VANETs is broadcasting EMs that help other vehicles to prevent disaster environments and traffic congestion [5].
To develop an efficient system, the following requirements should be fulfilled: i) the communication region must be adequate to give an appropriate warning time for potential vehicles; ii) the system must have high transfer consistency so that each vehicle receives the EMs guaranteeing their confidentiality; and iii) the system must minimize the hop count needed for broadcasting EMs. For this reason, routing mechanisms are suggested to effectively distribute EMs within the shortest possible interval.
Many routing mechanisms have been recommended for V2V communication [6]. For large-scale VANETs with changing architecture, these techniques are ineffective. As a result, TMED was developed [7], in which request spiders and authenticated spiders are broadcast to determine the communication route between the source vehicle and the target vehicles with the highest EM DDR. Further, an adaptive multi-priority information queue control was incorporated with a constricted greedy transfer mechanism depending on locality estimation to establish the broadcasting of EMs. However, the adjacent vehicle choice in this mechanism is dependent only on the DDR of the route created by adjacent vehicles. Whether or not all adjacent vehicles trust each other is not guaranteed.
Therefore, in this study, an adaptive restricted greedy forwarding scheme is proposed for adjacent vehicle allocation with the help of trust computation in TMED. It focuses on trusted adjacent vehicles by considering the required data about each vehicle, i.e., vehicle position, velocity, direction, and density. Each vehicle can broadcast a traffic warning or emergency data to estimate the trust and reputation score value of each adjacent vehicle. Once computation of the trust and reputation scores is completed, the reputation score values are compared with a threshold to identify the adjacent vehicles that are trustworthy and make the decision to accept the EMs broadcast by them. Then, the Euclidean distance between any two vehicles is computed. Also, each vehicle's position, velocity and density values are determined. Further, these estimated values are fed to the FL scheme to select the most trusted adjacent node as the forwarding node for broadcasting the EMs to the destination vehicle.
The remaining sections of this paper are organized as follows: Section 2 discusses the previous research associated with this study. Section 3 describes the methodology of the TMED-IRGF model, and Section 4 illustrates its performance efficiency. Section 5 concludes this work and suggests future enhancements.
2 Literature Survey
The Reliability-aware Intelligent Data Dissemination (ReIDD) algorithm [8] was developed to broadcast EMs to successive targets via deciding an optimal trustworthy path. A coalition game is formulated between the vehicles. Each vehicle has an initial payoff based on the transmission region, memory requirement, and computational cost. Based on this, different coalitions or groups are formulated between vehicles. Then, the EM is unicast via the vehicles to the resultant destination. However, this method has high computational time and packet loss occurs when the players' mean speed is low.
The Appropriate Vehicular Emergency Dissemination (AVED) protocol [9] was designed with a robust factor to compute the network's reliability. The primary goal of this protocol is to directly transfer EMs after recognizing the effect signal through the vehicle's crash sensor. Additionally, an accurate pause time is decided for the various sources utilizing a backoff task to accomplish the broadcast of the EMs. However, most of the retransfers were irrelevant and ineffective.
An improved location-based method [10] was designed for broadcasting EMs through large-scale VANETs. This method has the aim of transferring EMs to their attention region so that vehicles involved in the EMs can receive them. Thus, irrelevant transfers are avoided, and the channel resources are utilized adequately. Additionally, the EMs are received by adapting the transmission condition with less latency and fewer collisions. Further, it is completely shared, so that the vehicles are separately allocated to either received EMs or not. However, this method has high computational complexity.
The activated CCHI multichannel MAC algorithm [11] permits a vehicle to initiate the control channel interval (CCHI) by completing the service channel interval (SCHI). Additionally, system performance is enhanced by minimizing resource utilization and latency because of the fixed CCHI and SCHI. Moreover, a virtual TDMA beaconing process is executed to ensure the reception of periodic status information. However, it has low DDRs.
Multi-hop routing [12] was designed with selection of the best data disseminator and the most trustworthy forwarder. Ring splitting is performed to decide the most trustworthy forwarder by isolating the vehicles into rings depending on the coverage region. Every split is decided with the most trustworthy forwarder, which reduces the hop count. Also, efficient video broadcasting upon client request was added, which offers video delivery between traveling vehicles with the least latency due to the choice of enhanced quality channels. Moreover, video broadcasting is prioritized and transferred according to the frame types and the channel quality, accordingly. However, its reliability and DDR are not efficient.
The Adaptive Quantum Logic Gate (AQLG)-based network coding in VANETs [13] was developed to achieve reliable and effective multicasting. In this scheme, trust-based graph optimization is executed by the Cuckoo search algorithm, which selects robust relay nodes. However, its throughput is not effective since it needs many parameters for the optimization problem.
The Energy-Efficient Fast Message Distribution Routing Protocol (EE-FMDRP) [14] was developed using the cooperative attributes of moment- and directionoriented routing frameworks. It is used to disseminate emergency data between a source vehicle and target vehicles. In this protocol, locations of suitable vehicles are analyzed by a vector-angle-oriented categorization framework. Also, the optimum set of adjacent forwarding vehicles is chosen to disseminate the information with the shortest data delivery period. Moreover, the optimal path is framed with the selected forwarders. However, its average throughput and DDR are not effective.
The Effective EM Dissemination Scheme (EEMDS) [15] was developed for urban VANETs depending on mobility parameters to prevent transmission overhead and sustain a robust cluster design. All vehicles consider their direction angle and path loss to select an appropriate cluster head. Also, predicted link stability is used to select appropriate forwarding vehicles, which minimizes the number of retransmissions and transmission congestion in the network. However, this technique is not suitable for sparse networks because of the restricted communication range.
Optimization of the Adhoc Multihop Broadcast (OAMB) protocol [16] was developed for the distribution of data (i.e. EMs) in VANETs. The major objective of this protocol is to minimize network traffic when optimizing the broadcast period and ensuring high EM reliability. However, it does not consider the vehicle's trust values, which may influence the broadcast efficiency. Table 1 compares TMED-IRGF with the techniques discussed above.
Table 1 Differences between TMED-IRGF and other techniques.
| Ref.No. | Techniques | Mechanism | Keypoints | ||
|---|---|---|---|---|---|
| [8] | ReIDD | Formulating a coalition game among players (vehicles) so that EM dissemination decisions can be taken according to the players' payoff data. | High computational time and packet loss when the players' mean speed is low. | ||
| [9] | AVED | Estimating stability function based on distance and relative velocity between sending and receiving vehicles to choose the most reliable forwarder. | Most of the retransfers are irrelevant and ineffective. | ||
| [10] | Improved location-based method | Broadcasting a message in its region of-interest, so that vehicles who are interested in the message can receive it and decrease unnecessary broadcasting. | High computation burden. | ||
| [11] | An activated CCHI multichannel MAC algorithm | Enabling vehicles to switch to CCHI Still low DDR. whenever an EM message arrives and ensuring exchange of status messages among adjacent vehicles based on a virtual TDMA. | |||
| [12] | Multi-hop routing | Partitioning the network and choosing the best forwarder based on the weighted sums of each vehicle to create a path between an origin vehicle and a target vehicle. | Reliability and DDR not sufficient. | ||
| [13] | AQLG | Determining the nodes' trust values and choosing the relay nodes by the Cuckoo search algorithm. | Throughput not effective since it needs many parameters for the optimization problem. | ||
| [14] | EE-FMDRP | Evaluating the proper locations of the vehicles using vector-angle oriented classification and choosing the best forwarders according to vehicle direction within a certain transmission range to reduce the message delivery period. | Average throughput and DDR not effective. | ||
| [15] | EEMDS | Considering vehicle direction angle Not suitable in sparse networks and path loss to choose the cluster because of the restricted head. Also, chooses appropriate communication range. forwarders based on the estimated link stability to decrease the number of rebroadcasts. | |||
| [16] | OAMB protocol | Selecting the relay node based on the optimization of road and traffic conditions. | Does not consider the vehicles' trust values, which may influence broadcast efficiency. | ||
| Proposed | TMED-IRGF | Selecting the most trusted adjacent (forwarder) vehicles by considering trust, reputation score, vehicle position, velocity, direction, and density. Thus, the number of rebroadcasts is reduced significantly. | Data dissemination efficiency is influenced by frequent rebroadcasting of messages. | ||
3 Proposed Methodology
In this section, the TMED-IRGF model is described in brief. In this model, a vehicle receives an EM from every other vehicle. First, the V2V network is constructed, and the origin vehicle finds its position, the target vehicle's position, and the path structure with GIS and GPS [7]. These data are analyzed to discover each available path's intersections with the source vehicle and the target vehicles. The source vehicle broadcasts request spiders to the target. Also, the target vehicles broadcast authenticated spiders along with the actual route reverse to the source upon accepting the request spiders.
In TMED, the source vehicle chooses a suitable route with minimum latency. Among two neighboring junctions, an IRGF scheme is proposed to select the forwarding nodes for EM broadcasting. The IRGF consists of two phases, i.e., EM receiving decisions based on reputation estimation, and broadcasting decisions based on the FL scheme. In the first phase, the reputation of a neighboring vehicle is measured and compared to a threshold value for determining whether the source vehicle of the EM is trusted or not. If the source vehicle is trusted, then the EM transmitted by it is accepted properly; otherwise, the messages are discarded. Thus, the security of the system is effectively improved. In the second phase, the source vehicle computes vehicle distance, position, speed, direction, and density, which are fed to the FL scheme, which selects highly stable and trusted vehicles as forwarding nodes during EM broadcasting. Then, every vehicle processes the EM with the adaptive multipriority queue control scheme depending on the priority flag in the packet's header. Figure 1 depicts a block diagram of the TMED-IRGF model.
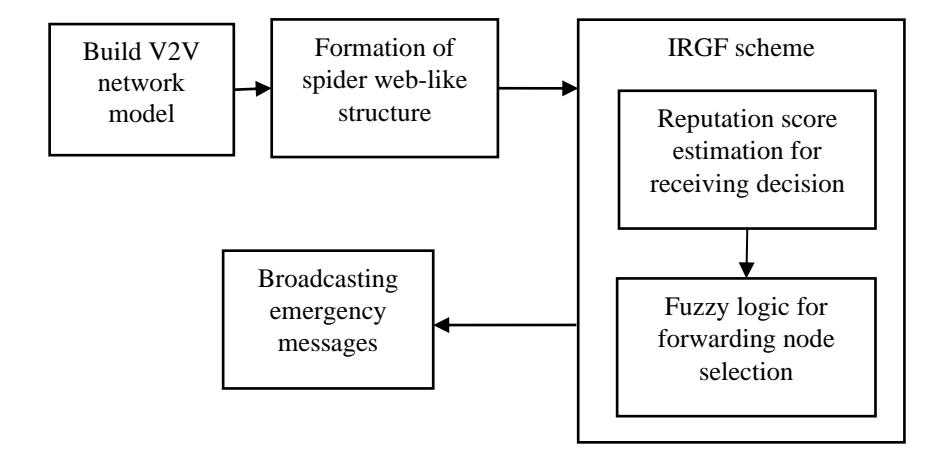
Figure 1 Block diagram of TMED-IRGF model.
The IRGF scheme consists of the following major processes:
- 1. Estimation of trust and reputation scores
- 2. Receiving decision
3. Broadcasting decision
3.1 Estimation of Trust and Reputation Score
Consider a vehicle \((v_i)\) with ID \((ID_i)\) that broadcasts an EM \((M_E)\) as referred to in Eq. (1) during event \(E_x\), where x is an event category. If \(v_i\) identifies the incident, then it transfers the EM along with the trust ranges of adjacent vehicles. When \(v_i\) accepts an EM from another vehicle, it can collect the EM along with the trust ranges from adjacent vehicles. If \(v_j\) gathers event information from \(v_i\), then it discovers the category and position of the incident. The EM \((M_E)\) is defined by
\[M_E = (ID_i, t, P_E, p_i) \tag{1}\]
In Eq. (1), \(ID_i\) is the ID of \(v_i\), t is the period of creating a message, \(P_E\) is the position of \(E_x\), and \(p_i\) is the position of \(v_i\) at time t. Additionally, every vehicle regularly broadcasts a beacon message, represented as \(M_B = (ID_i, t_i, p_i, s_i)\), where \(t_i\) is the beacon creation interval, and \(s_i\) is the velocity of \(v_i\).
Let \(\theta_i\) be the trust-telling probability of \(v_i\). It is defined as the fraction of the number of true events reported by \(v_i\) and the overall number of events reported by \(v_i\) over a certain time period. Assume that m is the overall number of true events reported by \(v_i\) and n is the overall number of incidents accounted by \(v_i\) until the present interval. Then, \(\theta_i\) is:
\[\theta_i = \frac{m}{n} \tag{2}\]
\(\theta_i = 1\) in Eq. (2) denotes trustworthy activities of the related vehicle, while \(\theta_i = 0\) denotes a high tendency towards providing false information. If an incident happens, then the adjacent vehicles disseminate an EM that includes additional information such as the IDs and \(\theta_i\) of other vehicles. A reputation score matrix is computed according to the EM from the adjacent vehicles, where \(\theta_{ij}\) is the computation of \(\theta_i\) by \(v_i\).
The reputation score matrix controls \(\theta_i\) of every adjacent vehicle from the perspective of the other vehicles. This reputation score is defined by the authorities and is accomplished based on the traffic load or density in the place where every vehicle is situated. Consider that every vehicle sets \(\theta_i\) to 1. When the reputation score matrix is created, the collective confidence range of \(v_i\) is computed from the reputation score matrix as:
\[\hat{\theta}_i = \frac{1}{n} \sum_{j=1}^n \theta_{ij} \tag{3}\]
In Eq. (3), \(\hat{\theta}_i\) denotes the predictor for \(\theta_i\) of \(v_i\).
3.2 Receiving Decision
After computing the reputation score matrix, an EM receiving decision is made by comparing the values of the reputation score matrix with a threshold (). If the reputation matrix score value is higher than , then the source vehicle of is considered to be a trusted vehicle and the EM is received successfully. Else, the source vehicle of is considered a non-trusted vehicle and the EM transmitted by it is discarded.
3.3 Broadcasting Decision
In EM broadcasting decisions, a source vehicle computes the distances to each of the adjacent vehicles, the vehicles' current position, speed, direction and density. The distance between and is determined by using Euclidean distance as follows:
\[Dis(v_i, v_j) = \sqrt{(x_i - x_j)^2 + (y_i - y_j)^2 - (z_i - z_j)^2}\](4)
In Eq. (4), ( , , ) are the 3D coordinates or position of the current vehicle for which the resultant adjacent list is being obtained. Also, ( , , ) are the 3D coordinates or location of each . The direction of is denoted as 0 (opposite) or 1 (same direction). The density of is referred to as the number of vehicles over a particular distance and is computed as follows:
\[Den(v_i) = \frac{Number\ of\ adjacent\ vehicles\ (v_j)\ for\ v_i}{Dis(v_i,v_j)} \tag{5}\]
Additionally, the speed of vehicle is computed as follows:
\[s_i = \frac{\text{Distance travelled by } v_i}{\text{Time taken}} \tag{6}\]
After computing the distance between each vehicle with their position, speed, density and direction, these parameters are given to the FL scheme to select the most appropriate trusted forwarding node.
The FL scheme encompasses fuzzification, fuzzy inference, and defuzzification. In fuzzification, the input measures are fuzzified in terms of low, medium, high, positive, and negative depending on the fuzzy membership functions. The output of this system is a set of forwarding nodes to broadcast EMs between a source vehicle and target vehicles. Fuzzy inference generates fuzzy rules in the form of an IF-THEN configuration. Then, a defuzzifier is used to choose the most appropriate forwarding nodes. Here, the triangular membership function is considered for both the entry and outcome parameters. It is defined as follows:
Fuzzy membership function \[\mu_A(x) = \begin{cases} 0, & x \le a \\ \frac{x-a}{b-a}, & a < x \le b \\ \frac{c-x}{c-b}, & b < x \le c \end{cases}\] (7)
In Eq. (7), x denotes the input or the output variable: distance or speed or vehicle density or reputation score, or chance as a forwarding node. The direction of the vehicle is taken as a binary value, i.e., either the same (1) or opposite (0). Thus, fuzzification is done except for the direction. Figure 2 shows an example of a fuzzy membership function, wherein x denotes either the input or the output variable.
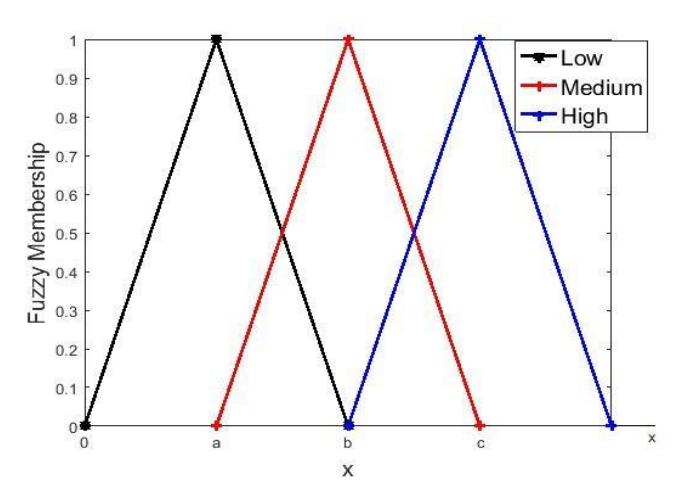
Figure 2 Example of triangular fuzzy membership function.
Fuzzification example:
Distance (x) = 45m, a = 20, b = 50, c = 70
\[\mu_A(x) = \begin{cases} \frac{45 - 20}{50 - 20}, & 20 < 45 \le 50 \end{cases}\]
\[\mu_A(x) = \frac{25}{30} = 0.83\]
Speed (x) = 200 km/hr, a = 50, b = 120, c = 220
\[\mu_A(x) = \begin{cases} \frac{220 - 200}{220 - 120}, & 120 < 200 \le 220 \end{cases}\]
\[\mu_A(x) = \frac{20}{100} = 0.2\]
Vehicle density (x) = 150, a = 70, b = 120, c = 210
\[\mu_A(x) = \begin{cases} \frac{210 - 150}{210 - 120}, & 120 < 150 \le 210 \end{cases}\]
\[\mu_A(x) = \frac{60}{90} = 0.67\]
Reputation score (x) = 35, a = 55, b = 104, c = 160
\[\mu_A(x) = \{0, 35 \le 55 = 0\}\]
If the direction is the same, then its fuzzy value is 1, i.e., its corresponding binary value. Table 2 gives some examples of fuzzy rules for deciding the most appropriate trusted forwarding nodes during EMs broadcasting.
Table 2 Some examples of fuzzy rules.
| Distance | Direction | Speed | Vehicle density | Reputation score | Chance as forwarding node |
|---|---|---|---|---|---|
| L | S | L | L | Н | Н |
| L | S | M | M | H | Н |
| M | O | M | Н | L | L |
| M | S | L | M | H | M |
| H | O | H | Н | L | L |
| L | O | H | M | H | M |
| M | S | L | L | Н | Н |
*Note: L-Low, M-Medium, H-High, S-Same, O-Opposite
If the distance (0.83) is high, direction (1) is the same, speed (0.2) is low, vehicle density (0.67) is medium and reputation score (0) is low, then the chance of the node forwarding is low. According to these fuzzy rules, the most trusted forwarding vehicles are selected effectively to broadcast the EM between the source vehicle and the destination vehicles with reduced latency and maximum DDR.
Algorithm: Adjacent vehicle selection
Input: Number of vehicles
Output: Highly trusted and least distance adjacent vehicles
Begin
Initialize the source and destination vehicle;
Transfer the beacon messages as defined in Eq. (1) between each vehicle;
(ℎ )
Calculate their using Eq. (2);
Compute the reputation score matrix using Eq. (3);
Compare the reputation score matrix with ;
Find the trusted vehicle and receive the EM;
Determine the distance between and using Eq. (4);
Select the forwarding trusted vehicle;
Apply the FL using Eq. (7);
Broadcast the EM between the source vehicle and the target vehicles;
End
4 Simulation Results
The TMED-IRGF model was implemented using Network Simulator, version 2.34 (NS2.34) and its performance was analyzed with ReIDD [8], AVED [9], and TMED [7] models in terms of average transmission delay (ATD), DDR, routing overhead (RO), and accuracy of trusted adjacent vehicle selection. The modeling parameters are listed in Table 3.
Table 3 Simulation parameters.
| Parameters | Range | ||
|---|---|---|---|
| Simulation region | 1500 × 1500m2 | ||
| Number of vehicles | 150 | ||
| Mobility model | RandomTrip | ||
| Beacon message size | 20 bytes | ||
| Beacon interval | 5s | ||
| MAC protocol | IEEE MAC 802.11p | ||
| Interface queue | NewPriQueue | ||
| Queue size | 20 | ||
| Packet category | Constant Bit Rate (CBR) | ||
| Packet size | 5Kbyes | ||
| Packet generation speed | 1-10 (packets/s) | ||
| Channel capacity | 2 Mbps | ||
| Simulation time | 600s | ||
4.1 ATD
ATD is defined as the mean amount of time needed for broadcasting an EM between the source vehicle and the destination vehicles. Figure 3 shows the ATD
(in seconds) values of ReIDD, AVED, TMED and TMED-IRGF models under a varied number of vehicles. This indicates that the ATD of TMED-IRGF using 30 vehicles was 36.95% lower than that of ReIDD, 28.19% lower than that of AVED, and 12.26% lower than that of TMED model. For 60 vehicles, the ATD of TMED-IRGF was 28.88% lower than that of ReIDD, 19.08% lower than that of AVED, and 10.89% lower than that of TMED model.
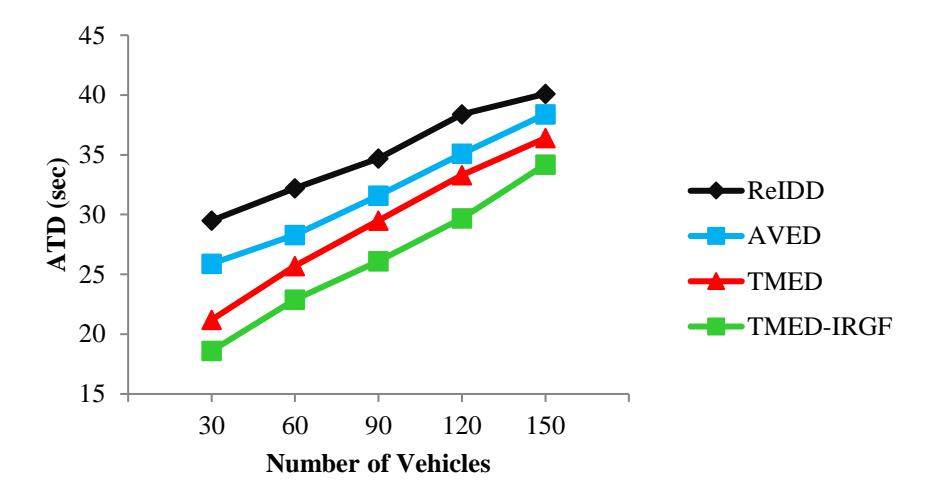
Figure 3 ATD vs number of vehicles.
For 90 vehicles, the ATD of TMED-IRGF was 24.78% lower than that of ReIDD, 17.41% lower than that of AVED, and 11.53% lower than that of TMED model. For 120 vehicles, the ATD of TMED-IRGF was 22.66% lower than that of ReIDD, 15.38% lower than that of AVED, and 10.81% lower than that of TMED model. For 150 vehicles, the ATD of TMED-IRGF was 14.71% lower than that of ReIDD, 10.94% lower than that of AVED, and 6.04% lower than that of TMED model. To summarize this analysis, the average ATD of TMED-IRGF was 25.2%, significantly lower than that of all other models because it chooses the least-distance trustworthy adjacent vehicles for broadcasting an EM.
4.2 DDR
DDR is defined as the amount of successfully delivered messages to the destination vehicle within a given time. Figure 4 portrays the DDR (in %) values of the ReIDD, AVED, TMED, and TMED-IRGF models under different amounts of vehicles. This indicates that the DDR of TMED-IRGF with 30 vehicles was 7.68% higher than that of ReIDD, 4.92% higher than that of AVED, and 1.95% higher than that of TMED. For 60 vehicles, the DDR of TMED-IRGF was 8.13% higher than that of ReIDD, 5.48% higher than that of AVED, and 2.15% higher than that of TMED.
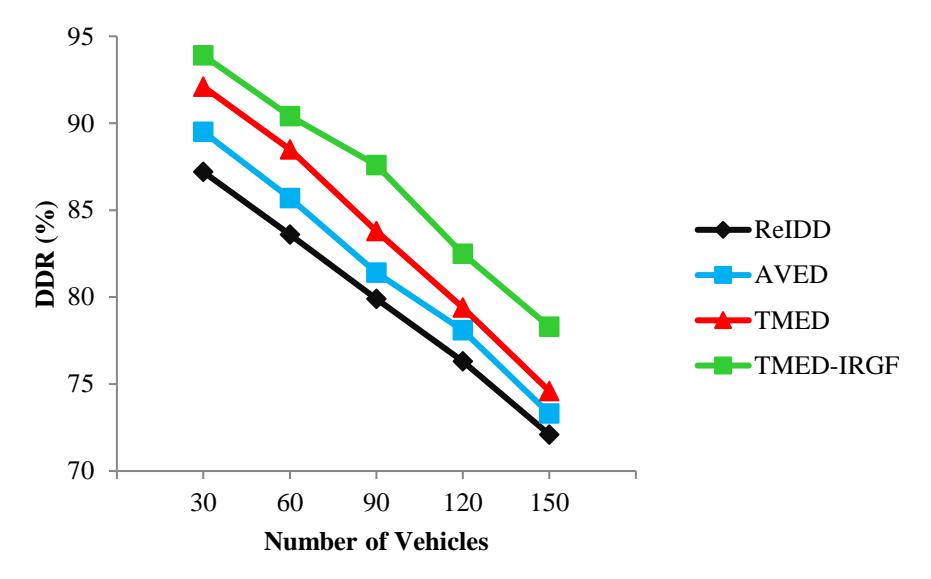
Figure 4 DDR vs number of vehicles.
For 90 vehicles, the DDR of TMED-IRGF was 9.64% higher than that of ReIDD, 7.62% higher than that of AVED, and 4.53% higher than that of TMED. For 120 vehicles, the DDR of TMED-IRGF was 8.13% higher than that of ReIDD, 5.63% higher than that of AVED, and 3.9% higher than that of TMED. For 150 vehicles, the DDR of TMED-IRGF was 8.6% higher than that of ReIDD, 6.82% higher than that of AVED, and 4.96% higher than that of TMED. To summarize this analysis, the average DDR of TMED-IRGF was 10.01% higher than that of all other models. Thus, TMED-IRGF avoided packet loss and so the DDR was maximized efficiently because of selecting highly trusted adjacent vehicles using their trust and reputation scores.
4.3 RO
RO is the fraction of the overall number of bytes of control messages, i.e., HELLO and sink packets to the collective number of bytes of EMs received by the target vehicle. Figure 5 shows the RO (in %) values of the ReIDD, AVED, TMED and TMED-IRGF models under a varying number of vehicles in the network. This indicates that the RO of TMED-IRGF with 30 vehicles was 8.55% lower than that of ReIDD, 6.56% lower than that of AVED, and 3.32% lower than that of TMED. For 60 vehicles, the RO of TMED-IRGF was 8.11% lower than that of ReIDD, 5.56% lower than that of AVED, and 2.86% lower than that of TMED.
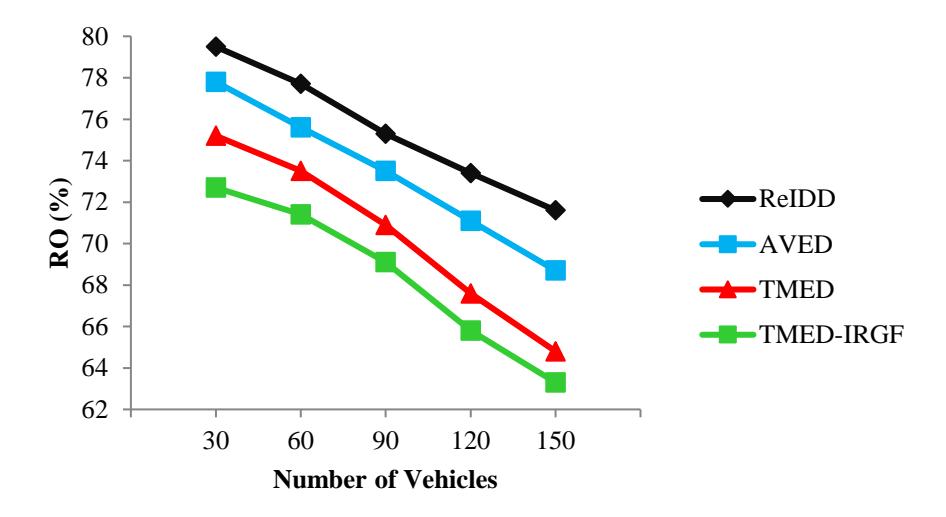
Figure 5 RO vs number of vehicles.
For 90 vehicles, the RO of TMED-IRGF was 8.23% lower than that of ReIDD, 5.99% lower than that of AVED, and 2.54% lower than that of TMED. For 120 vehicles, the RO of TMED-IRGF was 10.35% lower than that of ReIDD, 7.45% lower than that of AVED, and 2.66% lower than that of TMED. For 150 vehicles, the RO of TMED-IRGF was 11.59% lower than that of ReIDD, 7.86% lower than that of AVED, and 2.31% lower than that of TMED. To summarize this analysis, the average RO of TMED-IRGF was 3.19% lower than that of all other models due to the use of IRGF, which adjusts the number of beacon messages.
4.4 Accuracy of Trusted Adjacent Selection
This is the fraction of the overall amount of correctly selected adjacent vehicles to the number of cycles executed. Figure 6 depicts the accuracy of selecting trusted vehicles (in %) using the ReIDD, AVED, TMED and TMED-IRGF models under different numbers of vehicles. This indicates that the accuracy of TMED-IRGF for 150 vehicles with 5% of distrusted vehicles was 2.73% higher than that of ReIDD, 1.73% higher than that of AVED, and 0.75% higher than that of TMED. For 150 vehicles with 10% of distrusted vehicles, the accuracy of TMED-IRGF was 4% higher than that of ReIDD, 2.63% higher than that of AVED, and 1.19% higher than that of TMED. For 150 vehicles with 15% of distrusted vehicles, the accuracy of TMED-IRGF was 5.07% higher than that of ReIDD, 3.33% higher than that of AVED and 1.53% higher than that of TMED.
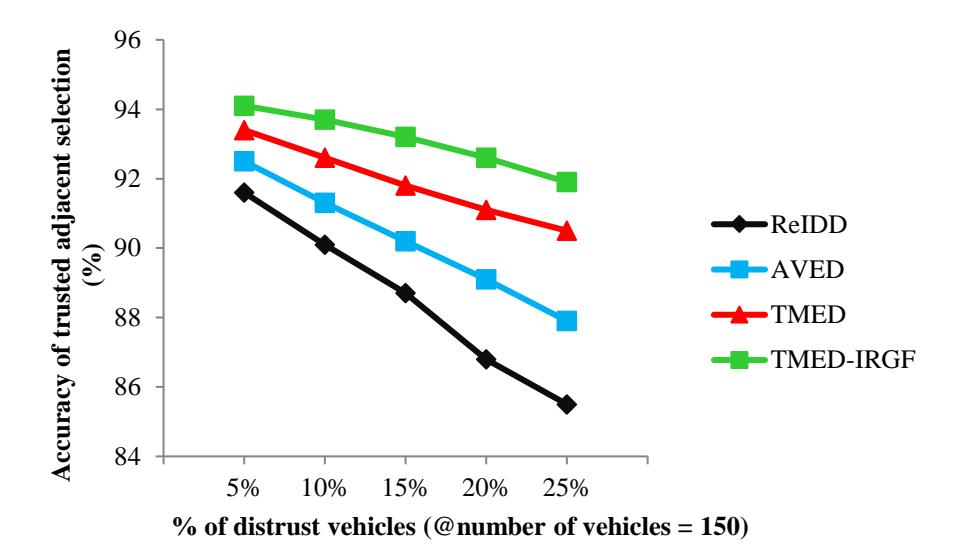
Figure 6 Accuracy vs. % of distrust vehicles.
For 150 vehicles with 20% of distrusted vehicles, the accuracy of TMED-IRGF was 6.68% higher than that of ReIDD, 3.93% higher than that of AVED, and 1.65% higher than that of TMED. For 150 vehicles with 25% of distrusted vehicles, the accuracy of TMED-IRGF was 7.49% higher than that of ReIDD, 4.55% higher than that of AVED, and 1.55% higher than that of TMED. To summarize this analysis, the average accuracy of trusted adjacent vehicles was 3.21% higher than that of all other models. This, it can be concluded that the TMED-IRGF model could successfully select the most trustworthy vehicles at the least distance to the source vehicle for EM broadcasting with minimum endto-end delay.
Additionally, the time complexity of this TMED-IRGF is (log ), whereas the ReIDD and TMED techniques have a time complexity of ((n + log )) and ( log2 ). This indicates that the presented TMED-IRGF has less time complexity compared to the existing techniques.
5 Conclusion
In this paper, an adaptive restricted greedy forwarding scheme was proposed for adjacent vehicle allocation with the help of trust computation in TMED. It focuses on trusted adjacent vehicles by considering required data about each vehicle in the network. Each vehicle can broadcast a traffic warning or emergency message to estimate the trust and reputation score of each adjacent vehicle. Then, the estimated values are compared with a threshold to determine whether a vehicle is trusted or not trusted. If the vehicle is trusted, then EMs broadcast by it are accepted. Otherwise, the messages are rejected, thus enhancing the network's security. Then, the Euclidean distance between any two vehicles, the vehicle location, density, direction, and speed are computed and fed to the FL scheme to select the forwarding nodes for broadcasting EMs to the target vehicles. To conclude, the simulation outcomes proved that the TMED-IRGF model achieved an average ATD of 26.3 sec, an average DDR of 86.54%, and an RO of 68.46% compared to existing models. Also, TMED-IRGF attained an average accuracy of 93.1% in selecting the trusted adjacent vehicles compared to the other models. Although it reduces delay and RO, the rebroadcasting of messages can affect the data distribution efficiency. For this reason, a future extension of this work will focus on effectively avoiding the rebroadcasting of messages.