
1 Introduction
Nowadays, many video editing tools are available to manipulate video. Attackers can use them to tamper with video content and falsify facts. However, the authenticity of video content is difficult to guarantee and requires extra attention if it is used as primary evidence. Video backgrounds contain both static and dynamic scenes. A static scene is characterized by the absence of moving objects or the presence of a static background, whereas a dynamic scene is characterized by moving objects. Although surveillance video often has static scene frames, attackers can exploit it to hide information and the tampering cannot be detected with the human eye.
Video forgeries have two categories: (i) intra-frame forgeries, which occur in the spatial domain, such as the removal of an object from a frame; and (ii) inter-frame forgeries, as shown in Figure 1, which occur in the temporal domain. A common inter-frame forgery consists of frame duplication, insertion, and deletion. This work concerns the identification of inter-frame forgery, which is the easiest type of forgery to carry out. For example, it is easy to delete a person entering a room in a surveillance video by deleting the part of the video where the person appears.
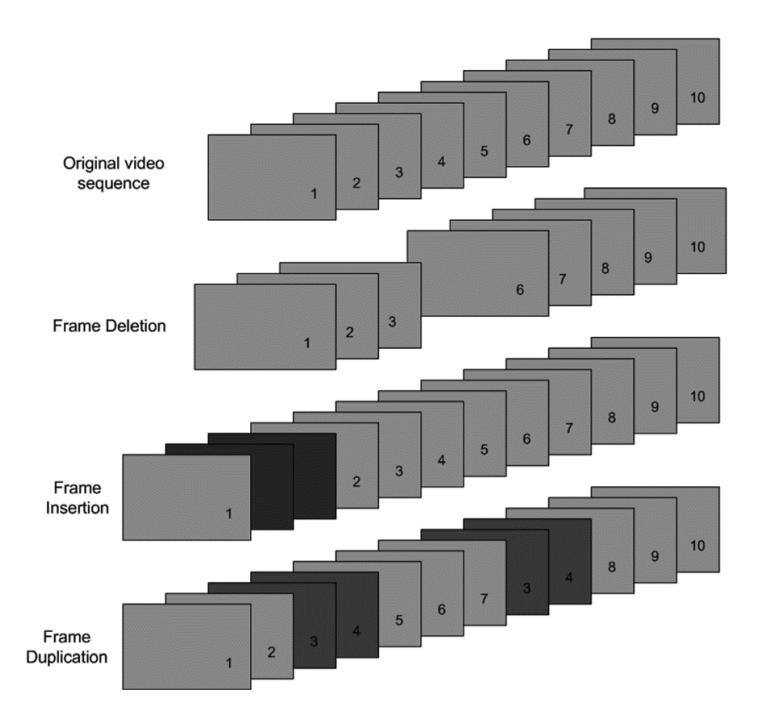
Figure 1 Illustration inter-frame video forgery.
Many researchers have developed forensic systems to expose inter-frame forgery. Fadl, et al., in [1], Yang, et al., in [2], and Wang, et al., in [3], only identified duplication forgery. Fadl, et al., in [4], Zheng, et al., in [5], Wang, et al., in [6], and Fadl, et al., in [7], identified duplication, frame insertion and deletion forgery. Furthermore, Fadl, et al., in [7], also developed a method to detect shuffling forgery. However, the limitations of these techniques make detecting inter-frame forgery in static scenes difficult.
Our idea is to segment video scenes into static scenes and dynamic scenes, which is our contribution to this field. Based on our observations, static scenes have small changes that are relatively close to zero, while dynamic scenes are characterized by large changes. Outliers in a static scene has small changes in frame deletion, while outliers in a dynamic scene has large changes in tampered videos. Based on the characteristics of each class of scene, our scheme performs forgery identification. It is also capable of detecting forgeries when they occur during class changes. In order to identify various scenes, optical flow is adopted because this method can extract motion features that effectively represent frame conditions.
The rest of this paper is organized as follows. In Section 2, we present several related techniques that are used to explore and enhance forgery detection. Section
3 highlights our main contribution, which is the construction of a scene segmentation algorithm. By developing this algorithm, both static and dynamic segments can be correctly identified. We present the experimental results in Section 4 and conclude this paper in Section 5.
2 Related Works
Fadl, et al., in [1], proposed duplication forgery detection by calculating the standard deviation and similarity between all pairs of feature vectors for subsequential windows and then evaluating the entropy of the Discrete Cosine Transform (DCT) coefficients for each selected residual frame. Yang, et al., in [2], developed an efficient two-stage approach for detecting frame duplication based on similarity analysis.
Wang and Farid, in [3], proposed duplication forgery detection by computing the spatial and temporal correlations among sequential video frames. The method is unsuitable for detecting the duplication forgery in static scenes. Fadl, et al., in [4], computed the differential energy of the residual between frames. The method detects inter-frame forgery (deletion, insertion, and duplication). However, this method requires an original video to identify the forgeries and fails to detect deletion forgery in static scenes. Zheng, et al., in [5], utilized the block-wise brightness variance descriptor (BBVD) for identifying inter-frame deletion and insertion. If forgery occurs, their approach detects inconsistencies in the BBVD ratio at equal time intervals. However, it has a low precision rate for the localization of forgeries.
Wang, et al., in [6], used optical flow and anomaly detection to detect inter-frame forgery (i.e., frame deletion, insertion, and duplication). Their method marks discontinuity points in the optical flow variation sequence depending on the type of forgery. However, it fails to detect forgeries in static frames. Fadl, et al., in [7], proposed Histogram of Oriented Gradients (HOG) features to detect insertion and deletion forgery. In addition, they calculate the Motion Energy Image (MEI) of edge images to detect duplication and shuffling forgery. However, their method fails to detect frame deletion in static scenes because the frame correlations are high in these scenes.
3 Proposed Method
Some existing works failed to detect forgery in static scenes. We observed that the methods were developed without considering the characteristics of the scenes. A common forgery (shown as a red point in Figure 2) occurs in both static and dynamic scenes. Static scenes show small changes in optical flow, close to zero, while dynamic scenes have larger changes. Based on this observation, we
hypothesized that if we classify the scenes into static and dynamic ones, and then perform forgery detection based on the characteristics of the scene, the process could more effective.
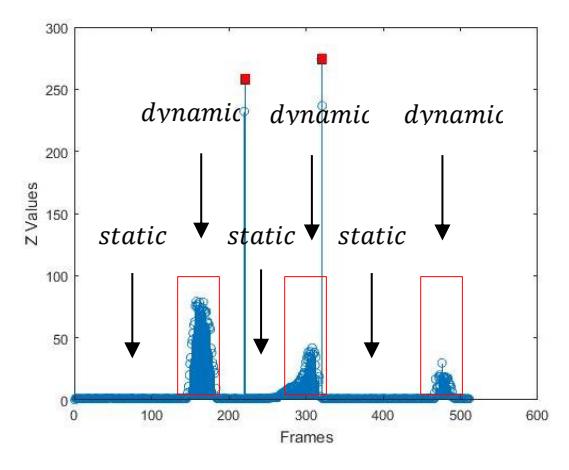
Figure 2 Illustration of static and dynamic scenes in a forgery video.
A block diagram of our system is shown in Figure 3. A questioned video is extracted into sequential frames f (x, y, t), which denote intensity location (x, y) and time t. It is converted into grayscale to reduce color space and resized to 50% of the original image size to reduce computational time. The system consists of two main stages: motion estimation and forgery identification. The following subsections discuss the stages.
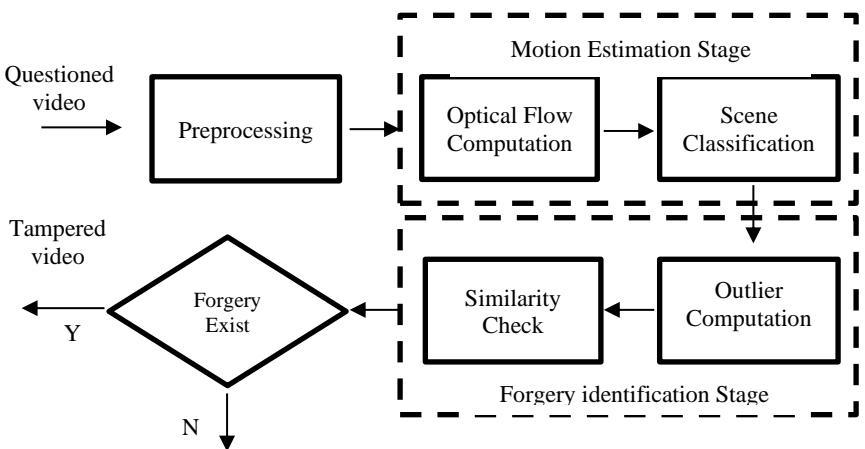
Figure 3 General scheme of video forgery identification.
3.1 Motion Estimation
3.1.1 Optical Flow Computation
The concept of optical flow is widely used for determining the instantaneous velocity of pixel movement of spatially moving objects on the observation imaging plane. To compute the optical flow between two images, the following optical flow constraint equation must be solved:
\[I_{\mathcal{X}}u + I_{\mathcal{Y}}v + I_{\mathcal{T}} = 0 \tag{1}\] where Ix , Iy , and It are the spatiotemporal image brightness derivatives, u is the horizontal optical flow, and v is the vertical optical flow. To solve Eq. (1), Lucas-Kanade in [8] performed a weighted least-square fit to combine information from several nearby pixels and assumed a constant velocity in the local neighborhood of the pixel. The method achieves this fit by minimizing Eq. (2):
\[\sum_{x \in \Omega} W^2 \left[ I_{\chi} u + I_{y} v + I_{t} \right]^2 \tag{2}\] where W is a window function for each section Ω.
For frame k and k + 1, we calculate the optical flow velocity (u, v) at location (x, y) using magnitude MAG denoted by:
\[MAG = \sqrt{(u^2 + v^2)} \tag{3}\] where MAG is the magnitude of u and v in Ω. In the velocity of optical flow (u, v), u denotes the horizontal optical flow and v denotes the vertical optical flow. Let frame contain the following magnitudes (Eq. (4)):
\[F_{k} = \begin{bmatrix} MAG_{1,1} & MAG_{1,2} & \dots & MAG_{1,n} \\ \vdots & \vdots & & \vdots \\ MAG_{m,1} & MAG_{m,2} & \dots & MAG_{m,n} \end{bmatrix}\](4)
First, compute the difference value of the magnitude of each frame (Eq. (5)):
\[diff_k = |F_k - F_{k+1}|, \ k \in [1, L-1]\] (5)
where L is the number of frames .
\[Z_k = \sum_{m} \sum_{n} dif f_{m,n,k} \qquad , k \in [1, L-1]\] (6)
where Z is the set of sums of the different magnitudes.
3.1.2 Scene Segmentation
Scene segmentation is applied to classify scenes into static and dynamic categories. We define a threshold to classify static and dynamic scenes by Eq. (7):
\[\tau_Z = \mu_Z + \alpha \sigma_Z \tag{7}\]
\[\mu_Z = \frac{1}{M} \sum_{k=1}^M Z_k \tag{8}\]
\[\sigma_Z = \sqrt{\frac{\sum_{k=1}^{M} (Z_k - \mu_Z)^2}{M}}\] (9)
where \(\mu_Z\) and \(\sigma_Z\) are mean and standard deviation of the different magnitudes in a frame sequence in a video; \(\alpha\) is a tolerance factor; M is the number of different magnitudes Z, and Z is the set of the sums of the different magnitudes, which is expressed in Eq. (6). If the tolerance factor \(\alpha\) is larger, static scene segments will have a larger interval than dynamic scene segments. Otherwise, a dynamic scene has a larger interval than a static scene. After that, each scene is detected as static if a frame (difference magnitude) is less than the threshold, otherwise it is dynamic. We discriminate each scene by using the threshold \(\tau_Z\) in Eq. (7) and each scene is detected as:
\[\operatorname{pred}(Z_k) = \begin{cases} static, \ Z_k < \tau_Z \\ dynamic, \ Z_k \ge \tau_Z \end{cases}\] (10)
Now, we have \(S = \{s_1, s_2, s_3, ..., s_N\}\), where S is the set of static and dynamic scenes, and N is the number of scenes. The scene segmentation algorithm used is given in Figure 4.
Pseudocode 1 Procedure of Scene Classification
1:
\mu_Z = mean of magnitude differences Z (Eq. 7)
\sigma_{\rm Z} = standard deviation of magnitude difference Z (Eq. 8)
2:
3:
\tau_Z = threshold of scene classification (Eq. 9)
M = number of different magnitudes Z
5:
n = minimum scene segment length (10)
m = difference between adjacent frame index
8:
for k from 1 to M do
9:
build SP_k = pred(Z_k) (Eq. 10)
10:
11:
for i from 1 to |SP| - 1 do
12:
13:
build\ a = \{i{+}1\mid SP_i \neq SP_{i+1}\}
14:
15:
16:
for i from 1 to |a| - 1 do
17:
m = y - x \mid x, y \in a
18:
If m \le n
build S = \{s(x:y) = s(w) \mid w = x - 1\}
19:
20:
21:
for i from 1 to |S| - 1 do
22:
23:
build b = \{i \mid S_i \neq S_{i+1}\}
24:
end for
Figure 4 Pseudocode for procedure for scene classification.
In Figure 5, frame duplication forgery (b) has frames with low values (1-70, 110- 190, 225-400, 430-450) based on the threshold that represents static scenes. Static scenes have a lower magnitude (MAG) value than dynamic scenes. It denotes two abnormal points (71-110, 400-439). Frame insertion forgery (c) represents a static scene in the ranges 1-150, 183-299, and 322-472. It represents two abnormal points (221-320), where another frame from a different video is taken and inserted at the abnormal point. Frame deletion forgery (d) indicates static scene intervals 1-316 and 338-361 and has only one abnormal point at 140 because the scene is deleted from 140 to 190.
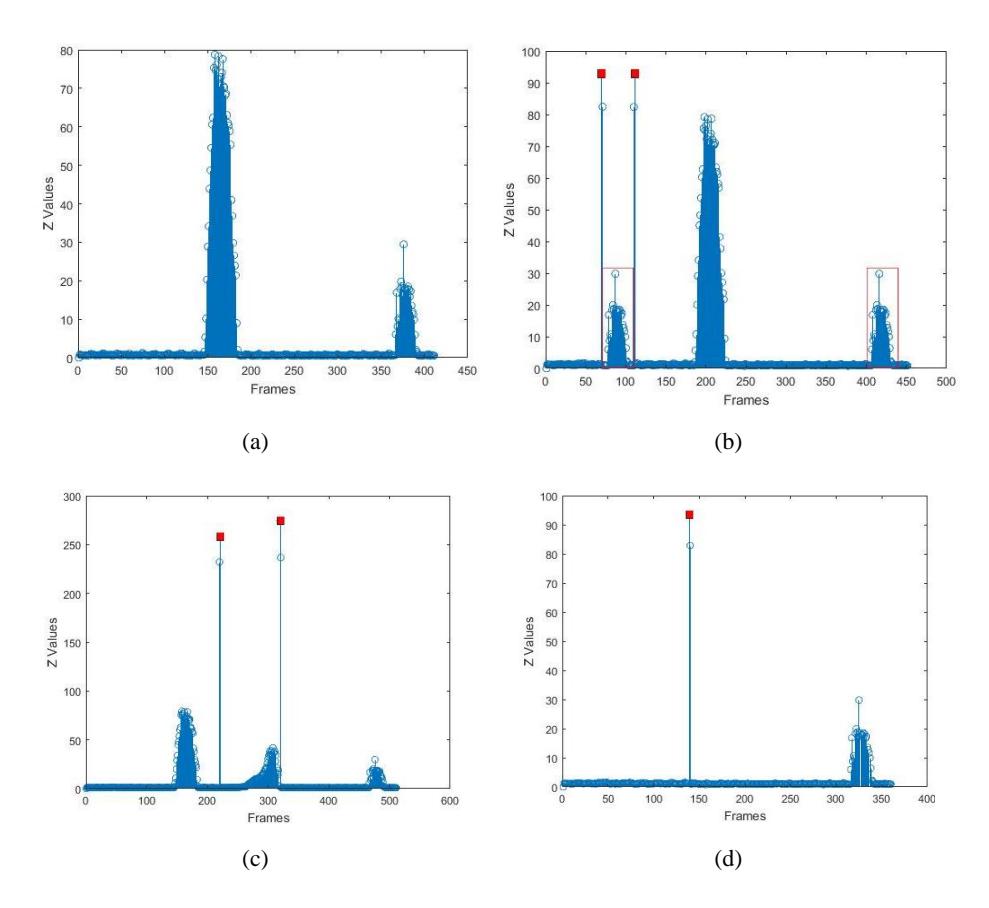
Figure 5 Different of optical flow magnitudes: (a) original video; (b) frame duplication; (c) frame insertion; (d) frame deletion.
3.2 Forgery Identification
3.2.1 Outlier Detection
An outlier in an inter-frame forgery case indicates potential discontinuity points in the optical flow sequence. Hence, we consider an outlier detection scheme to be applied to each scene. Wang, et al., in [6], introduced a variation factor to reveal the relative changes in optical flow sequences. When the range j of scene frame \(fs_j = [1...n]\), with \(fs_j \in s_i\), and i = [1...N], then the variation factor \(vf_i\) of a dynamic scene is:
\[vf_i = \frac{c \times fs_j}{fs_{i-1} + fs_{i+1}} \tag{11}\] where \(fs_{j-1}\), \(fs_j\), and \(fs_{j+1}\) are adjacent frames in a scene and based on observation we define c=2. Static scenes tend to have smaller changes in optical flow than dynamic scenes. Therefore, we developed a variation factor in Eq. (11) to represent optical flow changes in static scenes:
\[vf_i = \frac{c \times fs_j}{fs_{j-2} + fs_{j-1} + fs_{j+1} + fs_{j+2}}\] (12)
Next, we calculate the G test statistic of vf in \(S_i\), which requires the mean \(\mu_{vf}\) and standard deviation \(\sigma_{vf}\) of data set vf.
\[G_i = \frac{|vf_j - \mu_i|}{\sigma_i} \tag{13}\] where \(G_i\) is the G test statistics of vf in \(S_i\); vf is the variation factor per frame in a scene; \(\mu_i\) and \(\sigma_i\) are the mean and standard deviation respectively for each scene.
However, first we define the forgery threshold T as follows: \(T_{\text{dup}} = 4.5\); \(T_{\text{ins}} = 7\) and \(T_{\text{del}} = 4\). If the \(G_{\text{i}}\) value is greater than the threshold, accept the point as an outlier. An outlier denotes a forgery candidate in each scene.
\[Outlier = \begin{cases} no, G < T \\ yes, G \ge T \end{cases}\] (14)
3.2.2 Forgery Classification
To identify forgery types such as duplication, insertion, and deletion forgery, we apply a correlation coefficient to compute the similarity in each outlier scene:
\[C_{ij} = \frac{\sum_{i=1}^{n} (fs_i - \mu_{fs})(fs_j - \mu_{fs})}{\sqrt{\sum_{i=1}^{n} (fs_i - \mu_{fs})^2 \sum_{j=1}^{n} (fs_j - \mu_{fs})^2}}\](15)
where \(fs_i\) and \(fs_j\) are two compared frames \(F_k\) and \(\mu_{fs}\) is the mean of the frames in each scene. The detailed pseudocode description is given in Figure 6.
Pseudocode 2 Procedure of Forgery Identification
1:
vf<sub>i</sub> = variation factor per scene i (Eq. 12 and 13)
\mu_{vf} = mean of variation factor per scene i
2:
3:
\sigma_{vf} = standard deviation of variation factor per scene i
4.
5:
for i from 1 to |S| do
6:
build G_i = \{abs (vf_i - \mu_{vf}) / \sigma_{vf} \}
7:
8:
9:
stage 1
build DP_{ins} = \{i \mid G_i > T_{ins}\}
10:
11:
if |DP_{\rm ins}| \geq 2
do foreach pair \langle i,j \rangle in DP_{ins}
12.
13:
C_{i-1} = \operatorname{corr2}(fs_i, fs_{i-1})
14:
C_{i+1} = \operatorname{corr2}(fs_i, fs_{i+1})
if (C_{i-1} < C_{i+1} \& C_{i-1} < 0.1)
15:
16:
insertion at i
17:
18:
C_{j-1} = \operatorname{corr2}(fs_j, fs_{j-1})
C_{j+1} = corr2(fs_j, fs_{j+1})
19.
if (C_{i-1} > C_{i+1} & C_{i+1} > 0.1)
20:
21:
insertion at j
22:
23:
stage 2
24:
build DP_{del} = \{i \mid G_i > T_{del}\}
25:
if |DP_{\text{del}}| \geq 1
for i from 1 to |DP_{del}| do
26:
2.7:
C_{i-1} = \operatorname{corr2}(fs_i, fs_{i-1})
C_{i+1} = \operatorname{corr2}(fs_i, fs_{i+1})
28:
29:
if (C_{i-1} < C_{i+1} \& C_{i-1} < 0.65)
30:
deletion at i
31:
32:
stage 3
build DP_{\text{dup}} = \{i \mid G_i > T_{dup}\}
33:
34:
if |DP_{\text{dup}}| \ge 2
do foreach pair <i,j> in DP<sub>dup</sub>
35:
36:
do build S_{ij} = \{fs(k) | k \in [i, j]\}
do for
each fs(k) in S_{ij} and f_l in S_{ij}'
37.
38:
C = \operatorname{corr2}(f s_k, f_l)
if (C > 0.98)
39.
40:
duplication at i,j
Figure 6 Pseudocode for the forgery classification procedure.
In the first stage, we define a set of discontinuity points \(DP_{dup}\) if \(G_i\) is greater than \(T_{dup} = 4.5\). We construct a set subsequence \(S_{ij}\) from the pair point in \(DP_{dup}\) that will be compared to other frames in \(S'_{ij}\). We compute their similarity and classify a duplication forgery if the result greater than 0.98. We define for frame insertion \(DP_{ins}\), \(G_i\) is greater than \(T_{ins} = 7\) and deletion \(DP_{del}\) if \(G_i\) is greater than
\(T_{del} = 4.5\). The correlation coefficient is computed for each pair point in \(DP_{ins}\) and \(DP_{del}\) by comparing the current frame \(fs_i\) (i.e., outlier point) to the previous frame \(fs_{i-1}\) and the current frame \(fs_i\) to the next frame \(fs_{i+1}\). The detailed procedure for forgery identification is given in Figure 6.
4 Experimental Results
4.1 Dataset
This research used the dataset from TDTVD (Temporal Domain Tampered Video Dataset) [8], and we selected 68 videos consisting of 8 original videos, 20 frame deletion videos, 20 frame insertion videos, and 20 frame duplication videos. The videos ranged in length from 6 to 18 seconds and had a resolution of 320 x 240 px.
4.2 Parameter Setting
The algorithm was configured as follows: to classify various scenes, we used a tolerance factor \(\alpha = 1.5\); for short interval minimum scene segment length n = 10; the discontinuity point thresholds were \(T_{dup} = 4.5\); \(T_{ins} = 7\); and \(T_{del} = 4.5\); the similarity thresholds were \(C_{dup} = 0.98\); \(C_{ins} = 1.5\); \(C_{del} = 0.65\).
4.3 Performance Analysis
Identification performance was measured using a confusion matrix, i.e., Precision (P) and Recall (R), which are given by the following formulas:
\[Precision = \frac{TP}{TP + FP} \tag{15}\]
\[Recall = \frac{TP}{TP + FN} \tag{16}\] where the true positive (TP) rates (i.e., forged is detected as forged with the correct position), false positives (FP) (i.e., authentic is detected as forged), and false negatives (FN) (i.e., forged is detected as authentic). The F1 score is the harmonic mean of the scores for Precision and Recall. It goes from 0% to 100%, and a greater F1 score indicates a classifier of higher quality. The F1 score is derived from the following mathematical definitions of the Precision and Recall scores:
\[F1 Score = \frac{2 \times Precision \times Recall}{Precision + Recall}\] (17)
Table 1 demonstrates that our proposed method is effective for identifying interframe forgery. In the case of frame deletion, we obtained one false negative because there was no detected outlier, the Precision was 100% free of false
positives and Recall was 0.9375, meaning our method could identify frame deletion efficiently in various scenes. For frame insertion detection there was one false positive, because an outlier was detected as a frame deletion that was below the insertion threshold (). However, Recall was 100% free of false negatives, and Precision was 0.95. For frame duplication detection, which operates based on correlation matching on interval outliers, we obtained Precision 100% free of false positives and Recall 100% free of false negatives. Furthermore, for all forgery cases, we efficiently identified the location of the forgery.
| Predicted Class | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Video Type | Original | Deletion | Insertion | Duplication | ||||||
| Original | 100% (7/7) | - | - | - | ||||||
| Actual | Deletion | 6.25% (1/16) | 93.75% (15/16) | - | - | |||||
| Class | Insertion | - | 5% (1/20) | 95% (19/20) | - | |||||
| Duplication | - | - | - | 100% (15/15) | ||||||
Table 1 Confusion matrix of dataset.
To assess the proposed method's frame-level forgery detection (localization) efficiency, we performed experiments with varying numbers of frame duplications ranging from 25 to 164, frame insertions ranging from 30 to 180, and frame deletions ranging from 31 to 211.
4.4 Comparison with Existing Methods
To evaluate the robustness and performance of our system, the proposed method was compared with similar previous methods in Wang, et al., in [6], and Fadl, et al. in [7], as given in Table 2.
| Video Type | Deletion | Insertion | Duplication | ||||||
|---|---|---|---|---|---|---|---|---|---|
| P | R | F1 | P | R | F1 | P | R | F1 | |
| Score | Score | Score | |||||||
| Wang et al. [6] | 1 | 0.562 | 0.720 | 1 | 0.95 | 0.974 | 0.857 | 0.429 | 0.572 |
| Fadl et al. [7] | 0.7 | 0.438 | 0.539 | 0.864 | 0.95 | 0.905 | 0.833 | 1 | 0.909 |
| Our method | 1 | 0.938 | 0.968 | 0.95 | 1 | 0.974 | 1 | 1 | 1 |
Table 2 Precision, Recall and F1 Score for all forgeries among methods.
From Table 2, the F1 score varied in the range [0.95, 1] for all cases. This proves that the proposed method is efficient for inter-frame forgery identification. In terms of Precision, Recall and F1 Score, the proposed technique can detect forgery in a static scene for deletion forgery better than the other techniques because it discriminates different types of scenes and perform different variation
factors for each scene segment to detect outliers. In the case of duplication and insertion forgery, the Precision of all methods was almost free of false positives, while in the duplication forgery case, the Recall of Wang, et al. [6] was lower than the others because of false negatives in some forged videos with forgery in various scenes. We also observe that the forgeries probably had an outlier value lower than others, hence, Wang, et al. [6] failed to detect the forgeries since they defined deletion and insertion forgeries by the largest value. As a result, we perform similarity checks on outliers from different scenes in order to detect correlations between adjacent outliers.
5 Conclusion
We have shown that our proposed method is an efficient method for common inter-frame forgery (frame duplication, insertion, and deletion) detection, varying between 0.94 and 1 of Precision and Recall. We introduce scene segmentation to detect anomalies in different scenes. The experimental result was satisfactory for identifying forgeries, although sometimes false positives can occur with objects moving and localized as forged frames or false negatives with forgeries in a static scene.
In future work, we will consider detecting not only single forgeries in a video, but also more than one forgery.