
1 Introduction
Until now, qualitative properties (stability, boundedness, global existence, convergence, etc.) of scalar and vector differential and integro-differential equations of the first and second order are investigated and still discussed in the literature by researchers; for related works one can refer to Ahmad and Rama Mohana Rao [1], Bellman [2], Burton [3], Graef and Tunç [4], Hale [5], Hara and Yoneyama [6], Hsu [7], Huang and Yu [8], Kato [9], Kolmanovskii and Myshkis [10], Krasovskii [11], Lyapunov [12], Mustafa and Rogovchenko [13], Napoles Valdes [14], Qian [15], Sugie [16], Tunç [17-21], Tunç and Sevli [22], Tunç and Dinç [23], Tunç and Tunç [24-25], Yang [26], Yoshizawa [27], Zhou and Liu [28], Wiandt [29] and the references cited in these sources.
However, to the best of our information from the literature, the global existence and boundedness of solutions of integro-vector differential equations of the second order have not yet been discussed in the literature.
In this article, we study the global existence and boundedness of solutions to the second order nonlinear integro-vector differential equation
\[(r(t)X')' + A(t)F(t,X,X')X' + B(t)H(X) = \int_{0}^{t} C(t,s)X'(s)ds\] (1)
in which \(t \in \mathbb{R}^+\), \(\mathbb{R}^+ = [0, \infty)\), \(X \in \mathbb{R}^n\); r is a positive and continuously differentiable increasing function on \(\mathbb{R}^+\); A, B and F are \(n \times n\)-symmetric continuous matrix functions; \(H: \mathbb{R}^n \to \mathbb{R}^n\) is continuous, H is also differentiable with H(0) = 0. Also C(t,s) is an \(n \times n\)-continuous matrix function for \(0 \le t \le s < \infty\).
Instead of Eq. (1), we consider the equivalent differential systems
\[X' = Y\]
\[Y' = \frac{1}{r(t)} \int_{0}^{t} C(t, s) Y(s) ds - \frac{r'(t)}{r(t)} Y - \frac{1}{r(t)} A(t) F(t, X, Y) Y\]\[-\frac{1}{r(t)} B(t) H(X), \tag{2}\] which were obtained from Eq. (1).
Let \(J_H(X)\) denote the Jacobian matrix corresponding to the function H(X), that is,
\[J_H(X) = (\frac{\partial h_i}{\partial x_j}), (i, j = 1, 2, ..., n),\] where \((x_1,x_2,...,x_n)\) and \((h_1,h_2,...,h_n)\) are the components of X and H, respectively. Otherwise, it is supposed that the derivative \(\frac{d}{dt}B(t)=B'(t)\) and \(J_H(X)\) exist and are continuous. We also assume that all matrices given in the pairs A(t), F(t,X,Y); B(t), \(J_H(X)\); and B'(t), \(J_H(X)\) are symmetric and commute with each other. In addition, we assume that \(\langle X,Y\rangle=\sum\limits_{i=1}^n x_iy_i\); thus, \(\langle X,X\rangle=\left\|X\right\|^2\), and also \(\lambda_i(\psi)\) (i=1,2,...n), are the eigenvalues of the \(n\times n-\) matrix \(\psi\).
Our motivation comes from the papers of Napoles Valdes [15], Tunç [18] and those registered in the references. The aim of this paper is to give sufficient conditions to verify that all solutions of Eq. (1) are globally existent and bounded, based on Lyapunov's direct method. This paper is also a new attempt to discuss the global existence and boundedness of solutions of integro-vector differential equations of the second order, and it is a new improvement and has a contribution to the subject in the literature. In addition, the paper may be useful for researchers working on the qualitative behaviors of solutions.
In addition to the basic assumptions imposed on A, F, B, and H that appear in Eq. (1), we assume that there exist some positive constants \(k_1\), \(k_2\), \(k_3\) and \(k_4\) such that the following conditions hold:
- (A1) The matrices A, B and B' are symmetric, also \(\lambda_i(A(t)) \ge k_1\), \(\lambda_i(B(t)) \ge k_2\) and \(\lambda_i(B'(t)) \le 0\) for all \(t \in [0, \infty)\), (i = 1, 2, ..., n),
- (A2) F(t, X, Y) is an \(n \times n\)-symmetric matrix function and \(\lambda_i(F(t, X, Y)) \ge k_3\) for all \(t \in [0, \infty)\), and \(X, Y \in \mathbb{R}^n\), (i = 1, 2, ..., n),
- (A3) \(J_H(X)\) is symmetric and \(\lambda_i(J_H(X)) \ge k_4\) for all \(X \in \mathfrak{R}^n\), (i=1,2,...,n),
\[(A4) \quad \frac{1}{r(t)} \le 1,\]
(A5) \[\int_{0}^{t} ||C(t,s)|| ds + \int_{t}^{\infty} ||C(u,t)|| du \le R,\]
\[(A6) \quad R - \frac{r'(t)}{r(t)} \le 0.\]
2 Preliminaries
Before stating our main result, we give some well-known preliminary results that are required in the proof of our main result.
Consider the non-autonomous differential system
\[\frac{dx}{dt} = F(t, x),\tag{3}\] where x is an n- vector, \(t \in [0,\infty)\). Suppose that F(t,x) is continuous in (t,x) on D, where D is a connected open set in \(\Re \times \Re^n\).
Theorem 2.1 Let \(F \in C(D)\) and \(|F| \le M\) on D. Suppose that \(\varphi\) is a solution of Eq. (3) on the interval \(J = (\alpha, \beta)\) such that the following conditions hold:
- (i) The two limits \(\lim_{t \to \alpha^+} \varphi(t) = \varphi(\alpha^+)\) and \(\lim_{t \to \beta^-} \varphi(t) = \varphi(\beta^-)\) exist,
- (ii) \((\alpha, \varphi(\alpha^+))\) (respectively, \((\beta, \varphi(\beta^-))\)) is in D.
Then the solution \(\varphi\) can be continued to the left past the point \(t = \alpha\) (respectively, to the right past the point \(t = \beta\)).
Proof. See Hsu [7].
Lemma 2.1 Let A be a real symmetric \(n \times n\) matrix and \(\bar{a} \ge \lambda_i(A) \ge a > 0\), (i = 1, 2, ..., n)
where \(\bar{a}\) and a are constants. Then
\[\overline{a}\langle X, X \rangle \ge \langle AX, X \rangle \ge a\langle X, X \rangle\] and
\[\overline{a}^2\langle X, X \rangle \ge \langle AX, AX \rangle \ge a^2\langle X, X \rangle.\]
Proof. See Mirsky [30].
Lemma 2.2 Let Q,D be any two real \(n \times n\) commuting symmetric matrices. Then, the eigenvalues \(\lambda_i(QD)\), (i=1,2,...,n), of the product matrix QD are real and satisfy
\[\max_{1 \le j,k \le n} \lambda_j(Q) \lambda_k(D) \ge \lambda_i(QD) \ge \min_{1 \le j,k \le n} \lambda_j(Q) \lambda_k(D),\] where \(\lambda_i(Q)\) and \(\lambda_i(D)\) are, respectively, the eigenvalues Q and D.
Proof. See Mirsky [30].
3 Main Result
Theorem 3.1 Suppose that conditions (A1)-(A6) hold. Then every solution of System Eq. (2) are continuable and bounded.
Proof. We define the continuously differentiable Lyapunov functional V(t) = V(t, X, Y) by:
\[V(t) = \frac{1}{2} \langle Y, Y \rangle + \frac{1}{r(t)} \int_{0}^{1} \langle B(t)H(\sigma X), X \rangle d\sigma + \int_{0}^{t} \int_{0}^{\infty} \left\| C(u, s) \right\| \left\| Y(s) \right\|^{2} du ds.\] (4)
We can see that V(t, 0, 0) = 0.
Since \[H(0) = 0\], \(\frac{\partial}{\partial \sigma} H(\sigma X) = J_H(\sigma X) X\), then \[H(X) = \int_0^1 J_H(\sigma X) X d\sigma.\]
Hence, in view of the assumptions of Theorem 3.1 and by the use of some elementary operations, it is clear that
\[\int_{0}^{1} \langle B(t)H(\sigma X), X \rangle d\sigma = \int_{0}^{1} \int_{0}^{1} \langle \sigma_{1}B(t)J_{H}(\sigma_{1}\sigma_{2}X)X, X \rangle d\sigma_{2}d\sigma_{1}\] \[\geq \int_{0}^{1} \int_{0}^{1} \langle \sigma_{1}k_{2}k_{4}X, X \rangle d\sigma_{2}d\sigma_{1} = \frac{k_{2}k_{4}}{2} ||X||^{2}, \tag{5}\] and
\[\frac{d}{dt} \int_{0}^{1} \langle B(t)H(\sigma X), X \rangle d\sigma = \int_{0}^{1} \sigma \langle B(t)J_{H}(\sigma X)Y, X \rangle d\sigma + \int_{0}^{1} \langle B(t)H(\sigma X), Y \rangle d\sigma\] \[+ \int_{0}^{1} \langle B'(t)H(\sigma X), X \rangle d\sigma\] \[= \int_{0}^{1} \sigma \frac{\partial}{\partial \sigma} \langle B(t)H(\sigma X), Y \rangle d\sigma + \int_{0}^{1} \langle B(t)H(\sigma X), Y \rangle d\sigma + \int_{0}^{1} \langle B'(t)H(\sigma X), X \rangle d\sigma\] \[= \sigma \langle B(t)H(\sigma X), Y \rangle \Big|_{0}^{1} + \int_{0}^{1} \langle B'(t)H(\sigma X), X \rangle d\sigma\] \[= \langle B(t)H(X), Y \rangle + \int_{0}^{1} \langle B'(t)H(\sigma X), X \rangle d\sigma.\]
In view of Eq. (4) and Eq. (5) together, it follows that
\[V(t) \ge \frac{1}{2} \|Y\|^2 + \frac{k_2 k_4}{2r(t)} \|X\|^2.\] (6)
Thus, the functional V(t) defined by expression Eq. (4) is positive definite. Calculating the derivative of the functional V(t) along any solution (X(t), T(t)) of System Eq. (2), we find that
\[V'(t) = \frac{1}{r(t)} \int_{0}^{t} \langle Y(t), C(t, s)Y(s) \rangle ds - \frac{r'(t)}{r(t)} \langle Y(t), Y(t) \rangle - \frac{1}{r(t)} \langle Y(t), A(t)F(t, X, Y)Y(t) \rangle\] \[- \frac{r'(t)}{r^{2}(t)} \int_{0}^{t} \langle B(t)H(\sigma X), X \rangle d\sigma + \frac{1}{r(t)} \int_{0}^{t} \langle B'(t)H(\sigma X), X \rangle d\sigma + \|Y(t)\|^{2} \int_{t}^{\infty} \|C(u, t)\| du\] \[- \int_{0}^{t} \|C(t, s)\| \|Y(s)\|^{2} ds.\]
By assumptions (A1)-(A6), Lemma 2.1, Lemma 2.2 and the inequalities \(\langle U,V\rangle \leq \|UV\| \leq \|U\|\|V\| \leq \frac{1}{2}(\|U\|^2 + \|V\|^2)\), the validity of the following estimates can be verified:
\[\frac{1}{r(t)} \int_{0}^{t} \langle Y(t), C(t, s)Y(s) \rangle ds\] \[\leq \int_{0}^{t} ||Y(t), C(t, s)Y(s)|| ds\] \[\leq \int_{0}^{t} ||C(t, s)|| ||Y(t)|| ||Y(s)|| ds\] \[\leq ||Y(t)||^{2} \int_{0}^{t} ||C(t, s)|| ds + \int_{0}^{t} ||C(t, s)|| ||Y(s)||^{2} ds,\] \[\frac{r'(t)}{r(t)} \langle Y(t), Y(t) \rangle \geq 0,\] \[\frac{1}{r(t)} \langle Y(t), A(t)F(t, X, Y)Y(t) \rangle \geq \frac{k_{1}k_{3}}{r(t)} ||Y||^{2} \geq 0,\] \[\frac{r'(t)}{r^{2}(t)} \int_{0}^{1} \langle B(t)H(\sigma X), X \rangle d\sigma \geq \frac{r'(t)k_{2}k_{4}}{2r^{2}(t)} ||X||^{2} \geq 0\] and
\[\frac{1}{r(t)} \int_{0}^{1} \langle B'(t)H(\sigma X), X \rangle d\sigma \leq 0.\]
From the above estimates and assumptions (A5) and (A6) we conclude that
\[V'(t) \le \left(\int_{0}^{t} \|C(t,s)\| ds + \int_{t}^{\infty} \|C(u,t)\| du\right) \|Y(t)\|^{2} - \frac{r'(t)}{r(t)} \|Y(t)\|^{2}\]
\[\leq \left(R - \frac{r'(t)}{r(t)}\right) \leq 0.\]
This implies that Lyapunov functional V(t) is decreasing along the trajectories of System Eq. (2).
On the other hand, the continuity of all functions appearing in Eq. (1) guarantees that there exists at least one solution of Eq. (1) defined on \([t_0, t_0 + \delta)\) for some \(\delta > 0\).
Now we must show that the solution can be extended to the entire interval \([t_0, \infty)\).
Let us assume on the contrary that there is a first time \(T < \infty\) such that the solution exists on \([t_0, T)\) and
\[\lim_{t\to T^-} (\|X\| + \|Y\|) = \infty.\]
Let (X(t), Y(t)) be such a solution of System Eq. (2) with initial condition \((X_0, Y_0)\). Since V(t) is a positive definite and decreasing functional along the orbits of System Eq. (2), from Eq. (6), we can obtain that
\[\frac{1}{2} \|Y(T)\|^2 + \frac{k_2 k_4}{2r(T)} \|X(T)\|^2 \le V_0,\] where \(V_{0=}V(t_0,X_0,Y_0)\). From the last estimate, we can say that there exists a positive constant M such \(||X(t)|| \le M\) and \(||Y(t)|| \le M\) as \(t \to T^-\). Hence, we conclude that \(T < \infty\) is not possible, therefore we must have \(T = \infty\). This completes the proof of Theorem 3.1.
Example. Let n = 2. As a special case of Eq. (1), we consider the following differential system:
\[\left(e^{2t}\begin{bmatrix} x_{1}' \\ x_{2}' \end{bmatrix}\right)' + \begin{bmatrix} 2+t^{2} & 1 \\ 1 & 2+t^{2} \end{bmatrix} \begin{bmatrix} tx_{1}^{2} + ty_{1}^{2} + 3 & 2 \\ 2 & tx_{1}^{2} + ty_{1}^{2} + 3 \end{bmatrix} \begin{bmatrix} x_{1}' \\ x_{2}' \end{bmatrix} + \begin{bmatrix} 2+e^{-t} & 0 \\ 0 & 2+e^{-t} \end{bmatrix} \begin{bmatrix} x_{1}^{3} + x_{1} \\ x_{2}^{3} + x_{2} \end{bmatrix} = \int_{0}^{t} \frac{\sqrt{2}t}{(t^{2} + 4)^{2}} \begin{bmatrix} x_{1}'(s) \\ 0 & \frac{\sqrt{2}t}{(t^{2} + 4)^{2}} \end{bmatrix} \begin{bmatrix} x_{1}'(s) \\ x_{2}'(s) \end{bmatrix} ds, \quad (7)\] where
\[r(t) = e^{2t},\] \[A(t) = \begin{bmatrix} 2+t^2 & 1\\ 1 & 2+t^2 \end{bmatrix}, F(t, X, Y) = \begin{bmatrix} tx_1^2 + ty_1^2 + 3 & 2\\ 2 & tx_1^2 + ty_1^2 + 3 \end{bmatrix},\] \[B(t) = \begin{bmatrix} 2+e^{-t} & 0\\ 0 & 2+e^{-t} \end{bmatrix}, H(X) = \begin{bmatrix} x_1^3 + x_1\\ x_2^3 + x_2 \end{bmatrix}\] and
\[C(t,s) = \begin{bmatrix} \frac{\sqrt{2}t}{(t^2+4)^2} & 0\\ 0 & \frac{\sqrt{2}t}{(t^2+4)^2} \end{bmatrix}.\]
It is obvious that
\[\frac{1}{r(t)} = \frac{1}{e^{2t}} \le 1\] and \(\frac{r'(t)}{r(t)} = \frac{2e^{2t}}{e^{2t}} = 2\).
Clearly, A(t) and F(t, X, Y) are symmetric matrices and commute with each other. Hence, by elementary calculation we can easily find the eigenvalues of the matrices A(t) and F(t, X, Y) as
\[\lambda_1(A(t)) = t^2 + 1, \ \lambda_2(A(t)) = t^2 + 3\] and
\[\lambda_1(F(t,X,Y)) = tx_1^2 + ty_1^2 + 1, \ \lambda_2(F(t,X,Y)) = tx_1^2 + ty_1^2 + 5,\] so that
\[\lambda_i(A(t)) \ge 1 = k_1 \text{ and } \lambda_i(F(t, X, Y)) \ge 1 = k_3, (i = 1, 2).\]
Besides, the Jacobian matrix of H(X) is given by
\[J_H(X) = \begin{bmatrix} 3x_1^2 + 1 & 0 \\ 0 & 3x_2^2 + 1 \end{bmatrix}.\]
Now, it can be easily seen that \(J_H(X)\) and B(t) are symmetric matrices and commute with each other. We can obtain the eigenvalues of the matrices \(J_H(X)\), B(t) and B'(t) as follows:
\[\lambda_1(J_H(X)) = 3x_1^2 + 1, \ \lambda_2(J_H(X)) = 3x_2^2 + 1\] and
\[\lambda_1(B(t)) = \lambda_2(B(t)) = e^{-t} + 2, \ \lambda_1(B'(t)) = \lambda_2(B'(t)) = -e^{-t}.\]
It is now clear that
\[\lambda_i(J_H(X)) \ge 1 = k_4, \ \lambda_i(B(t)) \ge 2 = k_2 \text{ and } \lambda_i(B'(t)) \le 0, \ (i = 1, 2).\]
Further, it follows that
\[\int_{0}^{t} \|C(t,s)\| ds + \int_{t}^{\infty} \|C(u,t)\| du\] \[= \int_{0}^{t} \frac{2t}{(t^{2}+4)^{2}} ds + \int_{t}^{\infty} \frac{2u}{(u^{2}+4)^{2}} du = \frac{3t^{2}+4}{(t^{2}+4)^{2}} \le \frac{9}{32} = R.\]
Thus, all the assumptions of Theorem 3.1 are satisfied. Hence, we can conclude that all solutions of Eq. (7) are continuable and bounded.
The trajectories of the solutions of Eq. (7) are shown in Figure 1.
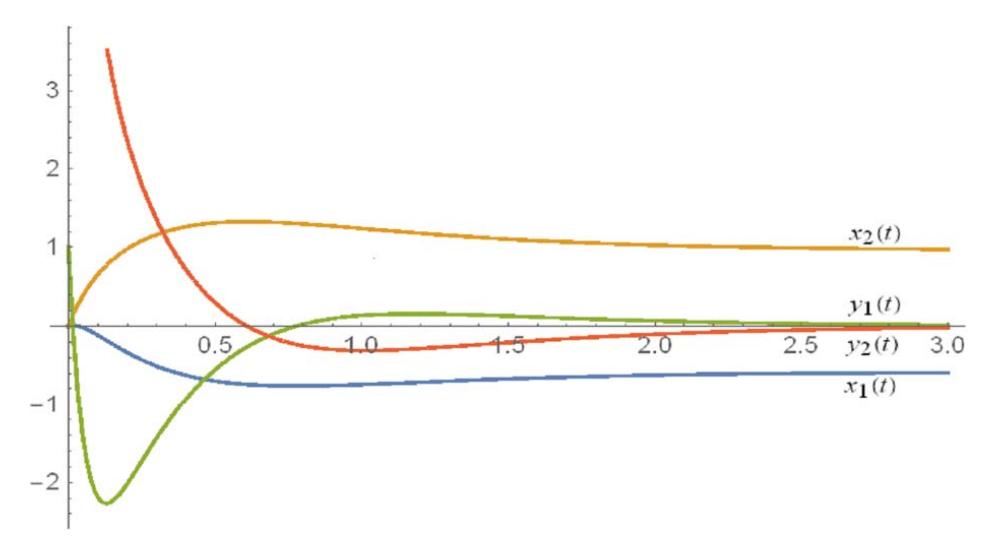
Figure 1 Time evolution of the states X(t) and Y(t) of Eq. (8).
4 Conclusion
A nonlinear integro-vector differential equation of the second order was considered. Sufficient conditions were obtained that guarantee the global existence and boundedness of the solutions of the equation considered. Our analysis is based on the successful definition of a suitable Lyapunov functional. In this particular case, we gave an example and employed MATLAB-Simulink to display the behaviors of the orbits of the equation considered. The result of this paper is new and correct, and it improves and complements that found in literature.
Acknowledgements
The author thanks the main editor and anonymous referees for their valuable comments and suggestions leading to improvement of this paper.