
1 Pendahuluan
Kontrol Model Prediksi biasanya dikenal dengan nama Model Predictive Control (MPC). MPC merupakan metode pengontrolan yang menggunakan model proses untuk menentukan sinyal kontrol dengan cara meminimalkan fungsi kinerja.
Di dalam strategi kontrol ini sangat diperlukan adanya metode optimisasi. Hal ini dikarenakan optimisasi merupakan bagian penting untuk mendapatkan sinyal kontrol optimal. Metode yang digunakan pada tugas akhir ini adalah optimisasi robas. Metode optimisasi ini diterapkan dalam menentukan besar sinyal kontrol sehingga meminimalkan fungsi objektif pengontrolan yakni fungsi kinerja MPC. Keungulan optimisasi robas mampu menangani ketidakpastian data. Ketidakpastian dalam hal ini berarti bahwa data suatu masalah optimisasi tidak diketahui secara pasti pada saat solusi optimalnya akan ditentukan.
Untuk melihat implementasi MPC dengan optimisasi robas di industri, maka digunakanlah sistem Waste Heat Boiler (WHB) sebagai sistem yang akan dikontrol.
2 Waste Heat Boiler
2.1 Sistem Waste Heat Boiler
PT.Petrokimia Gresik memiliki boiler bertipe waste heat boiler (WHB). Waste heat boiler adalah pembangkit uap yang memanfaatkan gas panas sisa dari generator turbin gas.
Gambar 1 Sistem waste heat boiler
2.2 Identifikasi Sistem WHB
Identifikasi dilakukan dengan pendekatan black box yaitu sistem dimodelkan dengan menggunakan data masukan dan data keluaran dari data pengukuran, tanpa memperhatikan proses didalamnya.
| Masukan | Keluaran | |||
|---|---|---|---|---|
| u1 | Fuel flow, N m3/hr | y1 | Steam pressure, kg/cm2G | |
| u2 | Boiler feedwater to HP drum, ton/hr | y2 | Furnace temperature, 0C | |
| u3 | Boiler feedwater to superheater, ton/hr | y3 | HP drum level, % of high | |
| Ganggugan Terukur | y4 | Steam flow, ton/hr | ||
| d1 | Exhaust gas temperature, 0C | y5 | Steam temperature, 0C | |
Tabel 1 Masukan dan keluaran WHB
Model yang digunakan untuk identifikasi sistem pada tugas akhir in adalah model ARX. Struktur model ARX merepresentasikan hubungan masukan keluaran dalam bentuk persamaan diferensi sebagai berikut
\[A(q^{-1})y(t) = B(q^{-1})u(t) + e(t)\] atau dapat ditulis sebagai
\[(1+a_1q^{-1}+...+a_{na}q^{-na})y(t) = (b_1q^{-1}+...+b_{nb}q^{-nb})u(t)+e(t)\]
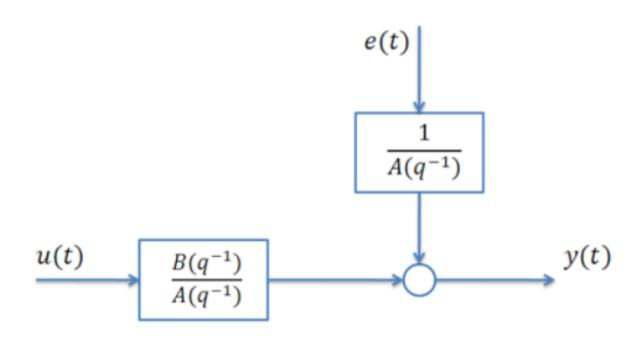
Gambar 2 Diagram blok struktur model ARX
Pendekatan pada sistem WHB dilakukan dengan pendekatan MJKJ pada model ARX, dengan memanfaatkan perangkat lunak Matlab. Struktur model yang dipilih dalam identifikasi adalah model multivariable ARX, dengan orde-orde polynomial:
na = 1, mere presentasikan jumlah pole dari masukan
nb = 1, me representasikan (jumlah zero + 1) dari masukan dengan nilai orde di atas, sesuai dengan persamaan , hasil identifikasi WHB dengan menggunakan perangkat lunak Matlab, diperoleh parameter polynomial A dan B sebagai berikut:
\[A = \begin{bmatrix} -0.9520 & -0.0011 & 0.0013 & -0.0100 & -0.0076 \\ 0.4095 & -0.9936 & -0.0111 & 0.0103 & -0.0624 \\ 0.01017 & 0.0083 & -0.9953 & 0.0199 & -0.0261 \\ 0.0807 & 0.0063 & -0.0208 & -0.9446 & 0.0067 \\ 0.0728 & -0.0118 & 0.0074 & -0.0455 & -0.9932 \end{bmatrix}\]
\[B = \begin{bmatrix} -0.0002 & -0.0043 & -0.0073 & -0.0018 \\ 0.0001 & 0.0094 & 0.0453 & 0.0015 \\ -0.0001 & 0.0077 & 0.1721 & -0.0001 \\ 0.0012 & 0.0139 & -0.1093 & 0.0082 \\ 0.0000 & 0.0109 & -0.3415 & 0.0007 \end{bmatrix}\]
3 Kontrol Model Prediksi
3.1 Dasar - dasar MPC
Model yang digunakan pada MPC adalah bentuk ruang keadaan diskrit
\[x(k+1) = A_p x(k) + B_p u(k) + B_d d(k)\]\[y(k) = C_p x(k)\]\[z(k) = C_z x(k)\]
\(A_p, B_p, B_d\) merupakan matriks masukan, \(C_p\) merupakan matriks keluaran teramati dari system, dan \(C_z\) merupakan matriks keluaran terkontrol dari sistem. Kita dapat memprediksikan himpunan output dari proses berdasarkan iterasi model berikut
\[\begin{bmatrix} \hat{z}(k+1\,|\,k) \\ \hat{z}(k+2\,|\,k) \\ \vdots \\ \hat{z}(k+H_z\,|\,k) \end{bmatrix} = \begin{bmatrix} C_v A_v \\ C_v A_v^Z \\ \vdots \\ C_v A_v^{H_v} \end{bmatrix} x(k) + \begin{bmatrix} C_v B_v & 0 & \cdots & 0 \\ C_v A_v B_v & C_v B_v & \vdots \\ \vdots & \ddots & \vdots \\ C_v A_v^{H_v-2} B_v & \cdots & C_v B_v \end{bmatrix} \begin{bmatrix} \hat{u}(k\,|\,k) \\ \hat{u}(k+1\,|\,k) \\ \vdots \\ \hat{u}(k+H_v-1\,|\,k) \end{bmatrix} + \\ \begin{bmatrix} C_v B_v & 0 & \cdots & 0 \\ C_v A_v B_v & C_v B_v & \vdots \\ \vdots & \ddots & \vdots \\ \vdots & \ddots & \vdots \\ C_v A_v^{H_v-1} B_v & C_v A_v^{H_v-2} B_v & \cdots & C_v B_v \end{bmatrix} \begin{bmatrix} \hat{d}(k\,|\,k) \\ \hat{d}(k+1\,|\,k) \\ \vdots \\ \hat{d}(k+1\,|\,k) \end{bmatrix}\]
Prediksi masukan \(u(k+i \mid k)\) dapat diekspresikan dalam prediksi perubahan masukan sebagai berikut:
\[\begin{bmatrix} \hat{u}(k \mid k) \\ \hat{u}(k+1 \mid k) \\ \vdots \\ \hat{u}(k+H_z-1 \mid k) \end{bmatrix} = \begin{bmatrix} u(k-1) \\ u(k-1) \\ \vdots \\ u(k-1) \end{bmatrix} + \begin{bmatrix} I & 0 & \cdots & 0 \\ I & I & & \vdots \\ \vdots & & \ddots & \vdots \\ I & I & \cdots & I \end{bmatrix} \begin{bmatrix} \Delta \hat{u}(k \mid k) \\ \Delta \hat{u}(k+1 \mid k) \\ \Delta \hat{u}(k+H_v-1 \mid k) \end{bmatrix}\]
Representasi persamaan ruang keadaan menjadi model prediksi yang hanya mengandung \(\Delta U\).
\[\begin{bmatrix} x(k+1) \\ u(k) \end{bmatrix} = \begin{bmatrix} A_v & B_v \\ 0 & I \end{bmatrix} \begin{bmatrix} x(k) \\ u(k-1) \end{bmatrix} + \begin{bmatrix} B_v \\ I \end{bmatrix} \Delta u(k) + \begin{bmatrix} B_d \\ 0 \end{bmatrix} d(k)\]
Persamaan ruang keadaan ini dapat direpresentasikan dengan
\[\xi(k+1) = A\xi(k) + B\Delta u + B_m d(k)\]
\[y(k) = C\xi(k)\]
Maka persamaan prediksi menjadi
\[\begin{bmatrix} \hat{y}(k+1 \mid k) \\ \hat{y}(k+2 \mid k) \\ \vdots \\ \hat{y}(k+H_{v} \mid k) \end{bmatrix} = \begin{bmatrix} CA \\ CA^{2} \\ \vdots \\ CA^{H_{B}} \end{bmatrix} \xi(k) + \begin{bmatrix} CB & 0 & \dots & 0 \\ CAB & CB & \vdots \\ \vdots & \ddots & \vdots \\ CA^{H_{B}-2}B & CA^{H_{B}-2}B & \dots & CA^{H_{B}-H_{u}}B \end{bmatrix} \begin{bmatrix} \Delta u(k)k) \\ \Delta \hat{u}(k+1)k) \\ \vdots \\ \Delta \hat{u}(k+H_{u}-1)k) \end{bmatrix} + \begin{bmatrix} CB_{m} & 0 & \dots & 0 \\ CAB_{m} & CB_{m} & \vdots \\ CAB_{m} & CA^{H_{v}-2}B_{m} & \dots & CB_{m} \end{bmatrix} \begin{bmatrix} d(k \mid k) \\ d(k+1 \mid k) \\ \vdots \\ d(k+H_{v}-1 \mid k) \end{bmatrix}\]
Atau
\[\hat{Y} = \underbrace{\phi \xi(k)}_{masa \ lampau \ masa \ akan \ datang} + \underbrace{L\hat{D} + \mathcal{G}\Delta\hat{U}}_{akan \ datang}\]
3.2 Fungsi kinerja MPC
Fungsi kinerja diberikan oleh:
\[J_{MPC} = \sum_{i=M_{v}}^{n_{v}} \left\| \hat{y}(k+i \mid k) - r(k+i) \right\|_{\sigma(i)}^{2} + \sum_{i=0}^{M_{v}-2} \left\| \Delta \hat{u}(k+1 \mid k) \right\|_{R(i)}^{2}\] dengan matriks pembobot
\[Q = \begin{bmatrix} Q(H_u) & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & Q(H_v) \end{bmatrix} \qquad \qquad R = \begin{bmatrix} R(0) & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & R(H_u) \end{bmatrix}\]
\[R = \begin{bmatrix} R(0) & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & R(H_u) \end{bmatrix}\]
Disederhanakan menjadi
\[J_{MPC} = \left\| \hat{Y} - J \right\|_{O}^{2} + \left\| \Delta \hat{U} \right\|_{R}^{2}\]
Penjejakan
\[\varepsilon(k) = J(k) - \phi \xi(k) - L\hat{D}\]
Dimana \(\mathcal{T}(k)\) merupakan himpunan penjejakan referensi \(\hat{r}(k+i\,|\,k)\) dan didefinisikan sebagai
\[r(k+1|k) = w(k+1) - e^{-TS/Tref} \{w(k) - y(k)\}\]
Fungsi kinerja menjadi
\[J_{mpc} = \left\| 9\Delta \hat{U} - \varepsilon \right\|_{Q}^{2} + \left\| \Delta \hat{U} \right\|_{R}^{2}\]
\[J_{mpc} = \text{konstanta} - \Delta \hat{U}^T \mathbf{G} + \Delta \hat{U}^T H \Delta \hat{U}\]
\[G = 2\vartheta^T O\varepsilon\]
\[H = \mathcal{G}^T O \mathcal{G} + R\]
Sehingga untuk meminimumkan fungsi kerja sebanding dengan meminimumkan fungsi kuadratik \(\Delta \hat{U}^T H \Delta \hat{U} - \Delta U^T G\). Fungsi kuadratik tersebut dapat diubah menjadi \(\Delta \hat{U}^T H \Delta \hat{U} - G^T \Delta \hat{U}\), karena matriks H adalah matriks Hessian. Kendala sistem tersebut dapat dituliskan dalam persamaan matematis, yaitu:
\[\Delta u_{\min} \leq \Delta \hat{u}(k+i \mid k) \leq \Delta u_{\max}\]
\[u_{\min} \le \hat{u}(k+i \mid k) \le \Delta u_{\max}\]
\[x_{\min} \le \hat{x}(k+i \mid k) \le x_{\max}\]
\[y_{\min} \le \hat{y}(k+i \mid k) \le y_{\max}\]
Persamaan diatas dapat dituliskan dalam bentuk umum
\[\Omega \Delta \hat{U} \leq \beta + Fu(k-1) + M\xi(k) + Xid(k)\] dan dapat disederhanakan menjadi
\[\Omega \hat{\mathcal{M}} \leq \omega\]
4 Optimisasi Robas
4.1 Optimisasi dengan Ketidakpastian
Permasalahan optimisasi diberikan dalam bentuk:
\[\min_{x} \{ f_o(x, \zeta) : f_i(x, \zeta) \le 0, i = 1, \dots, m \}\]
Dimana \(f_o(x,\zeta)\) merupakan fungsi objektif dari permasalahan optimisasi dan \(f_i(x,\zeta)\) dengan \(i=1,\ldots,m\), adalah fungsi kendala. Fungsi ini tergantung kepada vector x dan \(\zeta\), dimana \(x\in R^n\) adalah vector variable keputusan dan \(\zeta\in R^N\) adalah vector yang berisi data masalah. Sebagai contoh dalam permasalahan optimisasi linier pada umumnya
\[\min \left\{ C^T x : Ax = b, x \ge 0 \right\},\,\]
\(\zeta\) merupakan tiga variable (c,A,b) dimana \(c \in R^N\) adalah vector objektif, A adalah matriks kendala \(m \times n\) dan \(b \in R^m\) adalah vector sisi kanan pada kendala yang diberikan.
Untuk menangani ketidakpastian digunakan metoda robast counterpart, sehingga diasumsikan \(\zeta\) merupakan anggota himpunan ketidakpastian u. Dengan demikian permasalahan optimisasi dapat diekspresikan sebagai
\[\min\{f_o(x,\zeta):f_i(x,\zeta)\leq 0, i=1,\ldots,m\}, \quad \zeta\in U\]
Dari persamaan diatas, ketidakpastian dapat dikeluarkan dari fungsi objektif dari persamaan optimisasi dengan cara menggantinya dengan masalah yang ekivalen
\[\min\{t: f_o(x,\zeta) \le t, f_i(x,\zeta) \le 0, i=1,...,m\} \quad \zeta \in U\]
Sehingga RC memiliki solusi dari dengan meminimumkan \(^{t}\) diberikan oleh
\[\{(t,x): f_o(x,\zeta) \le t, \quad f_i(x,\zeta) \le 0, \quad i=1,\dots,m, \quad \forall \zeta \in u\}\]
Maka RC dari permasalahan ketidakpastian yang meminimumkan <sup>t</sup> menjadi
\[\min\{t: f_0(x,\zeta) \le t, f_i(x,\zeta) \le 0, i=1,...,m, \forall \zeta \in u\}\]
4.2 Optimisasi Konik
Bentuk umum dari permasalahan optimisasi konik adalah:
\[\min_{x \in \mathbb{R}^h} \{ \mathbf{C}^T x : Ax - b \in \mathbf{k} \}\]
Fungsi objektif dari persamaan diatas adalah \(C^T x\), dimana vector objektif \(C \in R^n\). Ax-b merepresentasikan fungsi affine dari \(R^n\) ke \(R^m\), k menunjukan convex cone pada \(R^m\) dan matriks kendala A berukuran \(m \times n\).
Jika diasumsikan ketidakpastian u diberikan sebagai bidang affine dari himpunan batas \(z = \{\zeta\} \cup R^n\), dan z diberikan oleh fungsi kendala:
- 1. Kendala linier, yaitu system dengan pertidaksamaan linier
- 2. \(P\zeta \leq P\)
- 3. Kendala kuadratik konik, yaitu system dengan pertidaksamaan kuadratik konik
- 4. \(||P_i\zeta + p_i|| \le q_i^T x r_i, i = 1,...,m\)
Kendala linier tersebut ekivalen dengan linier cone, begitu pun dengan kendala kuadratik konik sebanding dengan second-order cone. Dengan demikian dapat dibentuk dalam second-order cone programming dengan fungsi kendala linier, yaitu:
\(\min b^{\tau} x\)
s.t \[-A^{\tau}x + c \ge 0\]
\(\left\|A_i^{\tau}x + c_i\right\| \le q_i^{\tau}x - r_{1,i} = 1,...,m\)
4.3 Robust Counterpart pada MPC dengan Ketidakpastian
MPC dengan Optimisasi Robas dalam mengatasi ketidakpastian memerlukan metoda Robust Counterpart yang diusulkan oleh Ben-Tal dan Nemirovskii. masalah pokok dalam metoda ini adalah perumusan RO dari masalah ketidakpastian sebagai sebuah masalah optimisasi dapat dikerjakan dengan mudah atau sebaliknya. Oleh karena itu, Ben-Tal dan Nemirovskii mengusulkan memodelkan ketidakpastian ke dalam bentuk khusus yang disebut dengan ketidakpastian berbentuk elips. Pendekatan ini menghasilkan keuntungan, karena pemodelan RC akan menghasilkan permasalahan khusus dari CO seperti permasalahan optimisasi linier (LO), optimisasi kuadratik konik (CQO) atau optimisasi semidefinite (SDO), yang dapat dengan mudah dipecahkan oleh metoda interior point. Ketidakpastian berbentuk elips dengan variasi parameter dilakukan dengan maksud mencari parameter ukuran elips yang dapat mendekati ketidakpastian sebenarnya dan memberikan RO dengan solusi yang lebih optimal.
\[\min_{0} \left\{ \left( \Delta \hat{U}^{T} H \Delta \hat{U} - \mathbf{G}^{T} \Delta \hat{U} \right) : \Omega \Delta \hat{U} \leq \omega, \, \mathbf{G} \in U \right\}\] \[\min_{0} t\] \[\mathrm{s.t.} \quad t \geq \Delta \hat{U}^{T} H \Delta \hat{U} - \mathbf{G}^{T} \Delta \hat{U}\] \[\Omega \Delta \hat{U} \leq \omega\] \[\mathbf{G} \in U\] \[U = \left\{ \mathbf{G}^{n} + (rQ) w, \forall w, \|w\| \leq 1 \right\}, \, r \geq 0\] \[\min_{0} t\] \[\mathrm{s.t.} \quad -t + \Delta \hat{U}^{T} H \Delta \hat{U} - \left( \mathbf{G}^{n} \right)^{T} \Delta \hat{U} + \delta = 0\] \[\|zr^{-1}\| \leq \delta\] \[\Omega^{T} \Delta \hat{U} - zr^{-1} = 0\] \[\Omega \Delta \hat{U} \leq \omega\]
H dapat disusun sebagai \(H = S^T S\), sehingga \(\Delta \hat{U}^T H \Delta \hat{U} = \left\| S \Delta \hat{U} \right\|\) dan diasumsikan \(\left\| S \Delta \hat{U} \right\| \leq \beta\). Sehingga persamaan permasalahan RC-MPC dapat dirumuskan sebagai berikut:
min t
s.t \[-t + \beta - (G^n)^T \Delta \hat{U} + \delta = 0\]
\(||zr^{-1}|| \le \delta\)
\(||S\Delta \hat{U}|| \le \delta\)
\(\Omega^T \Delta \hat{U} - zr^{-1} = 0\)
\(\Omega \wedge \hat{V} \le \omega\)
5 Mpc Dengan Optimisasi Robas Pada Sistem Whb
5.1 Pemodelan Sistem
Model sistem yang digunakan adalah model persamaan ruang keadaan dari Waste Heat Boiler (WHB). Seperti yang telah dibahas pada bab 2, persamaan ruang keadaan sistem diskrit dapat ditulis berdasarkan struktur model ARX dengan waktu cuplik 1 menit sebagai berikut:
\[x(k+1) = Ax(k) + Bu(k) + Bd d(k)\]\[y(k) = Cx(k) + Du(k)\]
Dimana kinerja matriks A,B,C dan D adalah
\[A = \begin{bmatrix} 0.9792 & 0.0038 & 0.1790 & 0.0104 & 0.0564 \\ -0.0374 & 1.0072 & -0.4013 & -0.0028 & 0.0189 \\ -0.0009 & 0.0021 & 0.9441 & -0.0024 & 0.0013 \\ -0.0007 & -0.0002 & 0.0125 & 0.9922 & -0.0024 \\ -0.0154 & -0.0048 & 0.0216 & 0.0057 & 0.9559 \end{bmatrix}\]
\[B = \begin{bmatrix} -0.0006 & -0.0064 & -0.2594 & 0 \\ 0.0000 & 0.0114 & -0.1127 & 0 \\ -0.0001 & -0.0052 & 0.0488 & 0 \\ -0.0000 & -0.0102 & 0.0408 & 0 \\ 0.0011 & 0.0107 & -0.2405 & 0 \end{bmatrix}\]
\[Bd = \begin{bmatrix} 0 & 0 & 0 & 0 & -0.0046 \\ 0 & 0 & 0 & 0 & 0.0007 \\ 0 & 0 & 0 & 0 & -0.0014 \\ 0 & 0 & 0 & 0 & -0.0005 \\ 0 & 0 & 0 & 0 & 0.0073 \end{bmatrix}\]
\[C = \begin{bmatrix} 0.1532 & 0.0549 & 0.9353 & 0.0703 & 0.0172 \\ -0.4027 & 0.8607 & -0.3751 & -0.2889 & -0.1846 \\ -0.4587 & 0.0044 & -0.0860 & 0.8187 & -0.3791 \\ -0.4140 & 0.0507 & -0.0329 & -0.1453 & 0.8458 \\ 0.6180 & 0.5322 & -0.2510 & -0.4545 & 0.3082 \end{bmatrix}\]
Dan sistem ini merupakan sistem MJMK dengan gangguan terukur pada masukan.
5.2 Pengujian dan Analisis Pengontrol
Parameter untuk pengontrol MPC dengan optimisasi robas diberikan sebagai berikut:
Horizon kontrol = 3
Horizon prediksi = 5
Horizon minimum = 1
Matriks pembobot keluar kedepan
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Matriks pembobot sinyal keluaran
\[R = \begin{bmatrix} 0.5 & 0 & 0 & 0 & & & 0 \\ 0 & 0.0005 & 0 & 0 & & & 0 \\ 0 & 0 & 0.005 & 0 & & & 0 \\ 0 & 0 & 0 & 0.5 & & & 0 \\ 0 & 0 & 0 & 0 & \ddots & & 0 \\ 0 & 0 & 0 & 0 & 0 & \ddots & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0.005 \end{bmatrix}\]
Kendala sistem:
\[u1_{\min} = 0,\] \(u2_{\min} = 0,\) \(u3_{\min} = 0,\) \(d_{\min} = 349\)
\(u1_{\max} = 4643,\) \(u2_{\max} = 108,\) \(u3_{\max} = 12.9,\) \(d_{\max} = 575\)
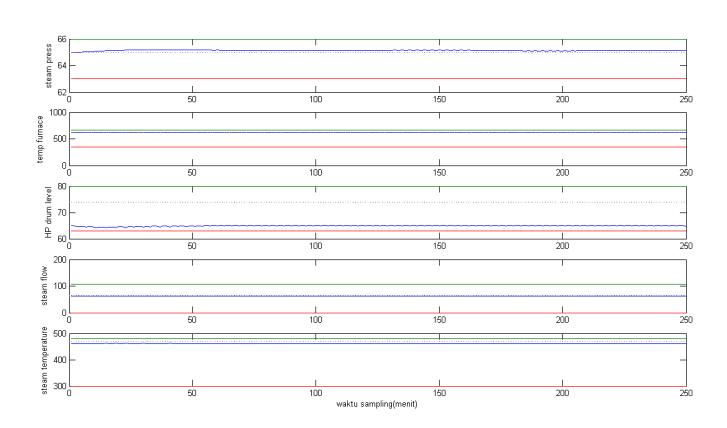
\(y1_{\min} = 0,\) \(y2_{\min} = 0,\) \(y3_{\min} = 0,\) \(y4_{\min} = 0,\) \(y5_{\min} = 0\)
\(y1_{\max} = 66\) \(y2_{\max} = 670\) \(y3_{\max} = 80\) \(y4_{\max} = 108\) \(y5_{\max} = 480\)
Ketidakpastian pada optimisasi robas
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Dengan selang parameter dimensi dari ketidakpastian adalah 0 < r < 2. Parameter ketidakpastian dipilih dengan uji dan coba. Pemilihan nilai diagonal Q semakin mengecil dan diatas rata-rata nilai mutlak rata-rata masukan. Hal ini bertujuan agar perubahan masukan yang dihasilkan akan semakin mengecil. Parameter dimensi elips akan dirubah dengan rentang \(0.1 \le 0 \le 2\). Sedangkan parameter untuk LQR adalah:
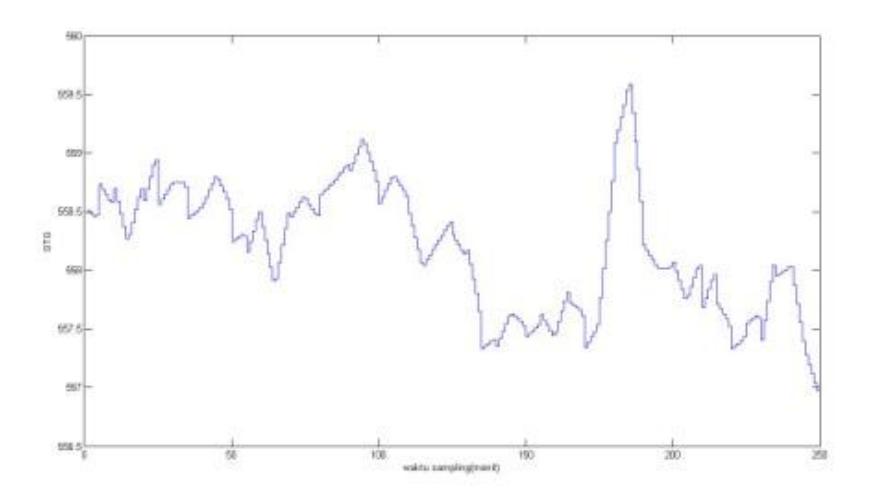
Gambar 3 Gangguan terukur dari panas sisa generator turbin
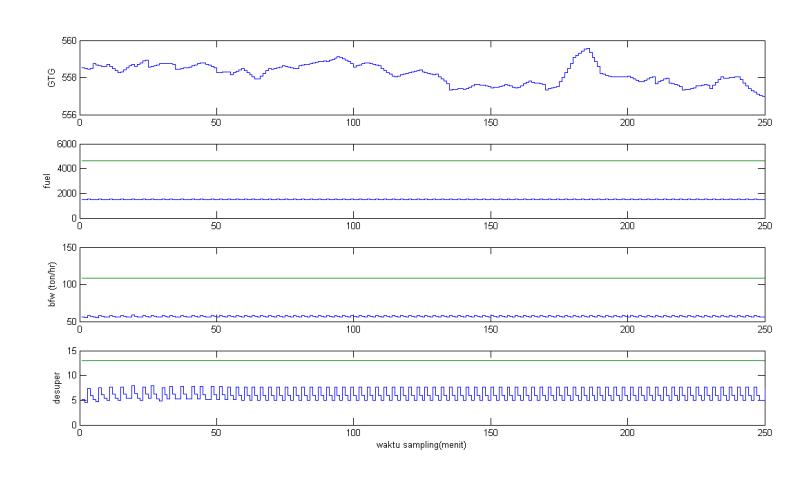
Gambar 4 Masukan terkontrol
Gambar 5 Nilai masukan sistem WHB dengan pengontrol MPC dan optimisasi robas
Tabel 2 Perbandingan MPC optimisasi robas dan data pabrik
| karakteristik | MPC dengan | Data |
| Optimisasi Robas | pabrik | |
| RMSE 1 | 0.1327 | 0.5474 |
| RMSE 2 | 1.3808 | 2.7610 |
| RMSE 3 | 9.0878 | 2.9364 |
| RMSE 4 | 1.7132 | 2.3603 |
| RMSE 5 | 8.9758 | 9.9719 |
| IAE 1 | 32.1710 | 119.3452 |
| IAE 2 | 341.5004 | 573.5380 |
| IAE 3 | 2.2713e+003 | 730.2716 |
| IAE 4 | 427.1013 | 549.4128 |
| IAE 5 | 2.2424e+003 | .4868e+003 |
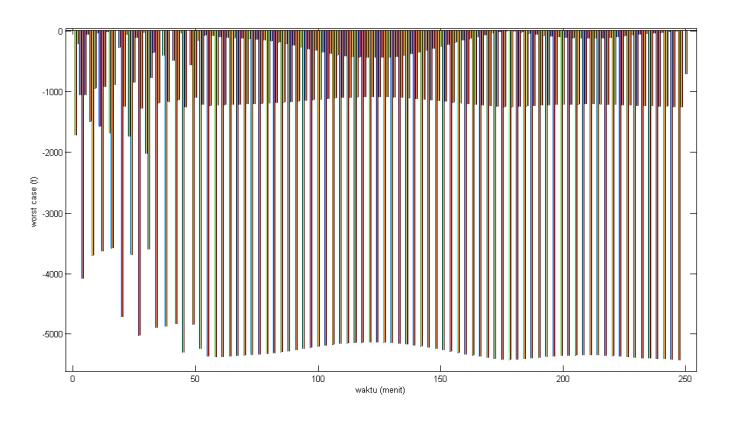
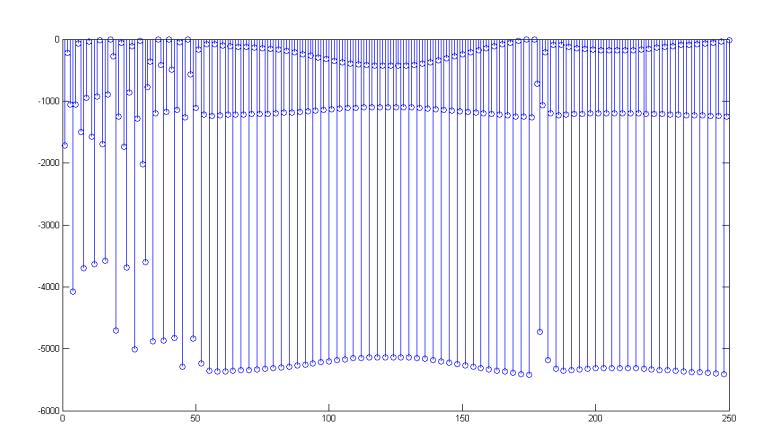
Gambar 6 Grafik batang dari nilai kasus terburuk untuk semua parameter
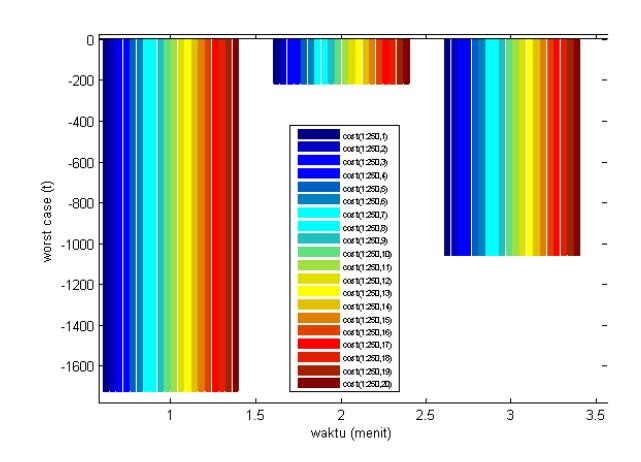
Gambar 7 Perbesaran grafik batang dari nilai kasus terburuk untuk semua parameter
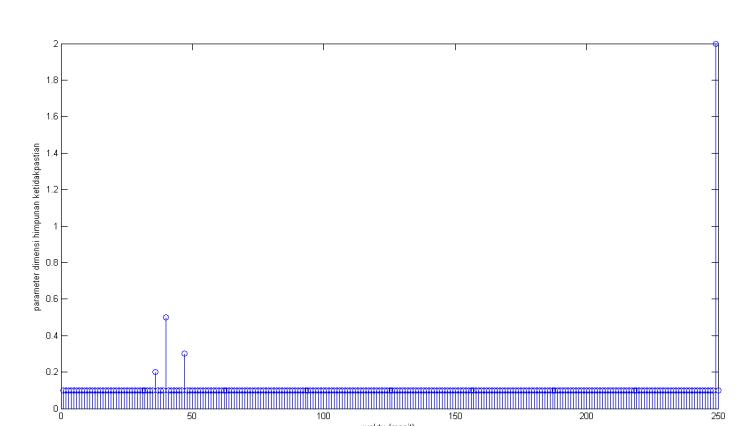
Gambar 8 Nilai parameter yang paling meminimumkan pada setiap waktu cacah
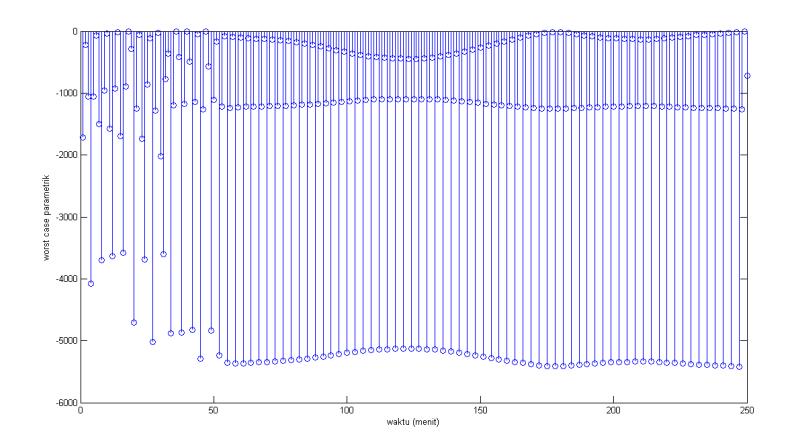
Gambar 9 Nilai kasus terburuk pada setiap waktu cacah untuk ketidakpastian elips parametrik
Jika kita bandingkan nilai kasus terburuk dari ketidakpastian elips parametrik dengan ketidakpastian elips dengan nilai pertubasi sama dan parameter dimensinya bernilai 1, akan memiliki perbedaan seperti pada gambar berikut:
Gambar 10 Nilai kasus terburuk pada setiap waktu cacah untuk ketidakpastian elips parametrik
Gambar 9 dan Gambar 10 menunjukan bahwa nilai kasus terburuk pada ketidakpastian elips parametrik lebih minimum jika dibandingkan dengan ketidakpastian elips.
6 Kesimpulan Dan Saran
6.1 Kesimpulan
- 1. Optimisasi robas dengan ketidakpastian elips parametrik dapat digunakan pada MPC
- 2. Pengontrol MPC dengan optimisasi robas dapat menjaga sistem tetap stabil terhadap gangguan dan ketidakpastian.
- 3. Pengontrol MPC dengan optimisasi robas lebih baik jika dibandingkan dengan pengontrol yang diaplikasikan pada plant saat ini.
- 4. Dengan kondisi awal tunak pada seluruh keluaran yang mempengaruhi kualitas uap didapat:
Tekanan uap
RMSE 1 = 0.1327 IAE 1 = 32.1710
Flow uap
RMSE 4 = 1.7132 IAE 4 = 2.3603
Temperatur uap
RMSE 5 = 8.9758 IAE5 = 2242.4
Dan nilai RMSE dan IAE ini lebih baik jika dibandingkan dengan proses pada plant saat ini. Sehingga dapat disimpulkan pengontrol MPC sengan optimisasi robas lebih optimal dibandingkan dengan pengontrol yang diaplikasikan saat ini
6.2 Saran
Berdasarkan pengalaman pada pelaksanaan tugas akhir ini dapat dikemukakan saran untuk pengembangan pengontrol MPC kedepannya, yaitu metoda pemilihan ketidakpastian pada optimisasi robas untuk MPC.
7 Daftar Pustaka
- [1] R. I. Simangunsong, Kontrol Model Prediksi dengan Optimisasi Robas : Studi Kasus Double Rotary Inverted Pendulum , Tugas Akhir Teknik Fisika, ITB, Oktober 2008.
- [2] J. M. Maciejowski, Predictive Control with Constraints, England: Prentice Hall, 2000.
- [3] K. V. Ling, "Introduction to Model Predictive Control," course notes, Bandung Institute of Technology, May 2008.
- [4] K. V. Ling and B.F. Wu, "Embedded Model Predictive Control," Proceedings of EEE The AUN/SEED-net Fieldwise Seminar on Control Engineering, 2007, pp. EL-2 – EL-6.
- [5] W. S. Lu, Use SeDuMi to Solve LP, SDP, SCOP Problems : Remarks and Examples, Departement of Electrical and Computer Engineering, University of Victoria, 2007.
- [6] Ben-Tal and A. Nemirovski, "Robust Optimization Methodology and Applications", Mathematical Programming, 2002, vol. 92, no. 3 Seri B, pp. 453-480.
- [7] D. Chaerani, Modelling Robust Design Problems via Conic Optimization, PhD. Thesis, Technische Universiteit Delft, 2006.
- [8] PT. Petrokimia Gresik, Standard Fasel-Lenjes Instrument List, 1993.