
1 Pendahuluan
Stroke yang istilah medisnya disebut dengan Cerebrovascular Accident merupakan salah satu penyakit yang menyerang sistem syaraf manusia. Pada penyakit ini terjadi kerusakan sel-sel syaraf pada otak akibat terganggunya pasokan darah pada otak. Di Indonesia stroke sendiri merupakan penyebab utama kematian dengan prevalensi berdasarkan riset kesehatan dasar tahun 2007 adalah 8 kasus per 1000 jiwa[1]. Dari seluruh pasien stroke di Indonesia, 2,5 % nya berakhir pada kematian sedangkan sisanya mengalami gangguan atau cacat ringan maupun berat. Semua pasien yang mengalami gangguan sel motorik akan menjadi bergantung pada bantuan orang lain dalam menjalankan aktivitasnya, seperti makan, minum dan sebagainya. Serangan stroke yang yang diderita juga akan membawa kelainan neurologis seperti berkurangnya kemampuan motorik anggota tubuh dan otot, kognitif, visual dan koordinasi secara signifikan[2]. Rehabilitasi merupakan salah satu jalan untuk meningkatkan kualitas hidup dari penderita stroke. Dalam dunia medis, tujuan utama rehabilitasi adalah mengembalikan sebagian atau keseluruhan kapabiltas fisik, sensorik atau mental pasien yang berkurang atau hilang akibat suatu penyakit atau cedera[2]. Dengan rehabiltasi ini diharapkan tingkat kemandirian dapat meningkat seiring berjalannya waktu, sehingga kualitas hidup penderita stroke juga dapat meningkat.
Selain mengkonsumsi obat, latihan fisik merupakan cara rehabilitasi yang cukup ampuh bagi penderita stroke. Latihan terapi fisik yang secara rutin dijalankan oleh pasien berhasil menunjukkan hasil positif berupa peningkatan kemampuan anggota gerak bawah,
mobilitas fungsional dan kualitas hidup[3]. Terkhusus untuk bagian tubuh bagian atas, latihan fisik sangat diperlukan mengingat disfungsi bagian tubuh atas akan sangat berpengaruh terhadap kapasitas mereka untuk melakukan kegiatan sehari-hari.
Kunci keberhasilan dari rehabiltasi adalah intensitas dan durasi latihan terapi fisik[4]. Terapi fisik ini biasanya dipimpin oleh seorang terapis yang dilakukan secara berkelanjutan. Karena keterbatasan waktu dari terapis membuat latihan rutin dari pasien menjadi terhambat. Sehingga untuk mengurangi ketergantungan dengan terapis, maka pasien perlu diberikan suatu alternatif agar pasien dapat berlatih dimanapun dan kapanpun tanpa tergantung dari jadwal terapis. Atas dasar itulah rehabilitasi berbasis teknologi sangat dibutuhkan pada saat ini.
Salah satu teknologi yang digunakan dalam proses rehabilitasi ini adalah robot. Robot dianggap sebagai salah satu solusi yang paling menjanjikan dalam bidang rehabiltasi. Dengan robot rehabilitasi yang interaktif, intensitas tinggi dan repetitif dapat diwujudkan tanpa adanya terapis. Dengan adanya robot ini membuat anggaran untuk terapis dapat dipangkas. Dengan adanya robot ini pula masalah kekurangan tenaga terapis di beberapa negara seperti Indonesia dapat diatasi. Sehingga para peneliti dibidang robotika sedang berlomba-lomba untuk mengembangkan robot yang membantu pasien dalam proses rehabilitasi.
Rigid robot adalah salah satu teknologi yang dikembangkan untuk membantu pasien dalam tahap pemulihan lumpuh. Salah satu masalah yang dihadapi robot adalah pemposisian robot itu sendiri. Dalam robot arm pada umumnya, peletakan motor dipasang seri, yang membuat beban berlebih pada salah satu joint. Dengan permasalahan ini membuat pengontrolan menjadi lebih sulit untuk diperhalus (terjadi getaran pada end effector). Selain itu masalah ini juga membuat motor pada joint 2 menjadi lebih cepat rusak, karena harus bekerja dengan torsi maksimal. Untuk menghindari hal tersebut pada joint ke 2 pada umumnya diberi motor dengan torsi yang lebih tinggi dari pada joint yang lainnya. Sehingga menjadi lebih tinggi harga pengadaan dari robot tersebut. Beberapa teknologi dan model robot mulai dikembangkan untuk meningkatkan pergerakan, meningkatkan efektifitas dan menekan serendah mungkin harga agar teknologi ini dapat dinikmati masyarakat luas.
Pengontrolan robot arm ini sangat pesat perkembangannya. Beberapa strategi kontrol telah dikembangkan dalam beberapa tahun terutama untuk mengatasi masalah posisi dari end effector itu sendiri[5-10]. Selain perkembangan kontrol untuk robot arm, perkembangan teknologi rehabilitasi pun telah banyak dilakukan diantaranya yaitu J.Hammel dkk, melakukan penelitian robot asisten pada klinik [11], kemudian C.A Stranger memperbaiki prioritas task pada robot asisiten[12]. C.G Burgar mengembangkan robot rehabilitasi berbasis platform dari standford[13]. Ditahun 1998 H.I Krebs mengembangkan robot rehabilitasi yang disebut dengan neuro-rehabilitation[14].
Tujuan dari makalah ini adalah untuk mendesain kontrol posisi dari 3 dof robot lengan, dengan desain mekanik yang berbeda dengan robot lengan pada umumnya, yaitu menggabungkan antara joint kedua dengan joint ketiga pada posisi paralel. Hal ini dimakasudkan agar joint ke dua tidak terlalu terbebani dengan berat lengan dan motor. Hasil pengontrolan akan dilakukan pada matlab, dengan konversi ke dalam mekanik robot lengan yang dilakukan sebelumnya untuk memudahkan analisa. Untuk menjelaskan tujuan tersebut, makalah ini terdiri dari pendahuluan, metode yang berisi pemodelan dan desain robot, algoritma pengontrolan posisi robot. Pada paper ini digunakan matlab untuk mensimulasikan kontrol PID pada robot yang akan dibuat.
2 Metode
2.1 Model Robot
Pada robot rehabilitasi ini yang dikembangkan adalah sistem robot dengan 3 derajat kebebasan (DOF). Dimana tangan pasien akan dikaitkan dengan end effector dari robot. Sistem robot yang akan digunakan dapat dilihat pada gambar 1. Untuk dimensi dari robot yang akan digunakan dapat dilihat pada tabel 1.
Tabel 1 Dimensi robot
| No | Bagian | Dimensi(cm) | |
|---|---|---|---|
| 1 | Roda utama | 30 | |
| 2 | Roda base | 55 | |
| 3 | Lengan a (L2) | 50 | |
| 4 | Lengan b (L3) 50 | ||
| 5 | Lengan c | 65 | |
Pada penelitan ini akan digunakan model robot yang dapat dilhat pada gambar 1(a). Terdapat tiga motor penggerak yaitu 1 pada base, dan 2 pada roda utama. Karena motor 3 diletakkan sejajar dengan motor 2, maka beban dari motor 2 dapat diminimalisir. Apabila menggunakan model 1(a) maka DH-Parameter akan membingungkan untuk ditentukan, sehingga dibuatlah model robot yang ekuivalen dengan model robot pada gambar 1(a). Sehinga robot dapat dikonversi menjadi model yang lebih sederhana pada gambar 1(b). Secara prosedur pengontrolan, baik robot a maupun robot b adalah sama. Yang berperan sebagai link 1 pada robot a adalah tiang penyangga roda utama yaitu sepanjang jari-jari roda utama yaitu 15 cm. Jari-jari roda utama ini berperan pada resolusi pergerakan dari joint ke 3 , semakin panjang jari-jari maka resolusi pergerakan akan semakin besar. Untuk link 2 pada robot a adalah lengan a yaitu sepanjang 50 cm. Kemudian untuk link 3 adalah lengan b dengan panjang sama dengan lengan a yaitu 50 cm. Ukuran ini disesuaikan dengan kondisi fisik masyarakat Indonesia pada umumnya dengan rata-rata panjang rentang tangan sepanjang 1 meter. Sehingga diharapkan dengan total panjang link 1 meter, keseluruhan gerak dari tangan pasien dapat dijangkau. Untuk diameter roda base, kurang berperan penting dalam pengontrolan robot ini.
Gambar 1 Model dari robot. (a) Desain robot yang akan digunakan (b) Hasil konversi kedalam bentuk umum untuk memudahkan analisa.
model robot arm pada gambar 1b, kemudian dicari matriks mentransformasikan koordinat dari end effector ke dalam koordinat frame. Untuk mendapatkan matriks homogen dari setiap link manipulator yang berdekatan, maka digunakanlah teknik yang disebut konversi -DH. Teknik ini diberi nama sama dengan penemunya yakni Denavit-Hartenberg yang mengusulkan metode ini pada tahun 1955 [15]. Teknik ini banyak diimplementasikan pada robot manipulator yang mempunyai rantai kinematik terbuka. Setiap sendi dari manipulator ini mempunyai derajat kebebabasan yang disebut DOF yang dapat bergerak secara rotasi maupun translasi. Sebelum mendapatkan nilai transformasi dari koordinat base(frame) ke koordinat end effector, maka yang perlu dilakukan adalah menentukan parameter-parameter DH yang terkandung dalam sistem robot tersebut. Secara lebih jelasnya parameter DH dapat dilihat pada tabel 2
Tabel 2 DH-Parameter.
| i | αi-1 | a⊦1 | di | θί |
|---|---|---|---|---|
| 1 | 0 | 0 | L1 | Θ1 |
| 2 | 90 | 0 | 0 | Θ2 |
| 3 | 0 | L2 | 0 | Θ3 |
| 4 | 0 | L3 | 0 | 0 |
Kemudian secara keseluruhan nilai matrix transformasi untuk manipulator dari link 1 ke link 3 dapat dilihat pada persamaan 1 dan 2
\[{}_{4}^{0}T = {}_{1}^{0}T {}_{2}^{1}T {}_{3}^{2}T {}_{4}^{3}T \tag{1}\]
\[{}^{0}_{4}T = \begin{bmatrix} C_{123} - C_{1}S_{23} & -C_{12}S_{3} - C_{13}S_{2} & S_{1} & C_{1}(L_{3}(C_{23} - S_{23}) + L_{2}C_{2}) \\ S_{1}C_{23} - S_{123} & -S_{13}C_{2} - S_{12}C_{3} & -C_{1} & S_{1}(L_{3}(C_{23} - S_{23}) + L_{2}C_{2}) \\ S_{2}C_{3} + C_{2}S_{3} & -S_{23} + C_{23} & 0 & L_{3}(S_{2}C_{3} + C_{2}S_{3}) + L_{2}S_{2} + L_{1} \\ 0 & 0 & 1 \end{bmatrix}\] \[(2)\]
Dari matrix pada persamaan 2 akan didapatkan persamaan untuk menentukan koordinat dari end effector, yaitu kolom ke-4 dari matrix transformasi. Koordinat end effector ini akan berkorespondensi dengan koordinat pada base. Dengan mengetahuin besarnya sudut pada setiap sendinya, maka akan didapatkan koordinat end effector. Forward kinematics dari 3-dof manipulator dapat dilihat pada persamaan 3.
\[\begin{bmatrix} x \\ y \\ z \end{bmatrix} = \begin{bmatrix} \cos \theta_1 (L_3 (\cos \theta_2 \cos \theta_3 - \sin \theta_2 \sin \theta_3) + L_2 \cos \theta_2) \\ \sin \theta_1 (L_3 (\cos \theta_2 \cos \theta_3 - \sin \theta_2 \sin \theta_3) + L_2 \cos \theta_2) \\ L_3 (\sin \theta_2 \cos \theta_3 + \cos \theta_2 \sin \theta_3) + L_2 \sin \theta_2 + L_1 \end{bmatrix}\] (3)
dan
\[\overset{\bullet}{X} = J(\theta)\overset{\bullet}{\theta} \tag{4}\]
dimana \(J(\theta) \in R^{nxn}\) adalah matrix Jacobian yang berisi sebagai berikut:
\[J(\theta) = \begin{bmatrix} -S_1(L_3(C_{23} - S_{23}) + L_2C_2) & C_1(L_3(-S_2C_3 - C_2S_3) - L_2S_2) & L_3C_1(-C_2S_3 - S_2C_3) \\ C_1(L_3(C_{23} - S_{23}) + L_2C_2) & S_1(L_3(-S_2C_3 - C_2S_3) - L_2S_2) & L_3S_1(-C_2S_3 - S_2C_3) \\ 0 & L_3(C_{23} - S_{23}) + L_2C_2 & L_3(-S_{23} + C_{23}) \end{bmatrix}\] (5)
Sehingga untuk mencari perubahan sudut pada setiap pergerakan dapat dicari dengan persamaan 6
\[\overset{\bullet}{\theta} = J(\theta)^{-1} \overset{\bullet}{X} \tag{6}\]
Pada penelitian ini pergerakan dari setiap motor diabatasi untuk mengurangi pergerakan yang dirasa tidak perlu dan tidak mungkin dilakukan oleh pasien. Batasan pergerakan ini dapat dilihat pada tabel 3
Tabel 3 Range pergerakan robot
| axis | Range sudut |
|---|---|
| 1 | 180° |
| 2 | 135° |
| 3 | 900 |
2.2 Kontrol Posisi
Pada pengontrolan ini yang digunakan adalah kontrol PID, dengan sebuah plant berupa motor de vang diletakkan pada masing-masing sendi. Algoritma dilakukan dengan memberikan nilai trayektori yang diinginkan, kemudian didaptlah nilai selisih antara nilai trayektori dengan nilai koordinat sebenarnya yang diperoleh melalui tahapan forward kinematic dari sudut-sudut masing motor yang diset secara default ketika robot baru dijalankan. Untuk lebih jelasnya dat dilihat pada gambar 2.
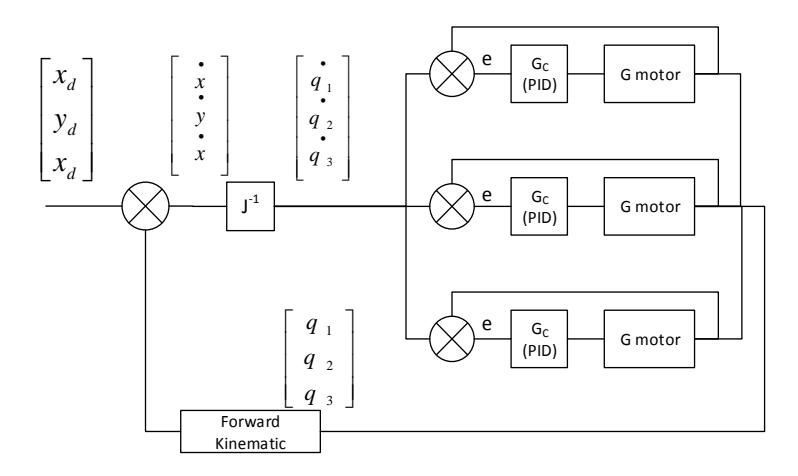
Gambar 2 Diagram blok pengontrolan posisi sudut pada setiap joint
Kemudian selisih ini digunakan untuk mencari selisih sudut dengan cara mengalikan seleisih koordinat dengan inverse dari matrix Jacobian. Nilai selisih sudut ini yang nantinya dijadikan sebagai set point dari kontroller pada setiap motor. Pada blok kontrol, yang digunakan adalah kontroller PID untuk mengatur posisi dari motor menyesuaikan set point yang telah diberikan, yakni dg. Kemudian setelah eror dari masing-masing motor sudah memenuhi batas yang telah ditentukan, nilai posisi ini akan ditransformasi kembali kedalam bentuk koordinat kartesian dengan teknik forward kinematic. Jika selisih antara koordinat sebenarnya dengan koordinat yang diinginkan masih belum mencapai batas yang ditentukan, maka akan terjadi proses looping. Ketika selisih sudah mencapai batas yang telah ditentukan, maka koordinat trayektori akan berpindah hingga akhirnya membentuk suatu setengah lingkaran, setengah persegi atau trayektori lain yang diinginkan.
Untuk penetuan parameter PID pada penelitian ini masih digunakan metode trial and error yakni memasukan nilai parameter dengan mencoba beberapa nilai terlebih dahulu. Dari nilai-nila tersebut didapatkan respon dari plant terhadap sinyal input. Sehingga dengan teknik ini didapatkan nilai Kp, Ki dan Kd yang sesuai dengan plant.
3 Hasil Simulasi
Pada bagian ini akan diujikan dua pilihan trayektori yaitu trayektori setengah lingkaran dan trayektori setengah persegi. Hal ini dipilih karena pada setengah lingkaran semua persendian pada lengan dapat bergerak secara maksimal. Sedangkan trayektori setengah persegi digunakan untuk melatih persendian lengan untuk mencapai sudut-sudut sempit.
Pada masing-masing pengujian akan diberikan nilai gain control yang berbeda untuk mendapatkan pengaruh penambahan gain terhadap kinerja robot.
3.1 Trayektori setengah lingkaran
Pada trayektori ini jari-jari yang digunakan adalah sebesar 50 cm. Hal ini dilakukan karena panjang tangan masyarakat di Indonesia kisaran 50 hingga 60 cm. Sehingga dengan pergerakan setengan melingkar sebesar 50 cm latihan fisik pada tangan dapat dilakukan secara menyeluruh. Untuk hasil simulasi dapat dilihat pada gambar 3 . Pada gambar 3, dapat dilihat pergerakan sistem pada detik ke-4 dan detik ke -8. Untuk dapat melakukan gerakan setengah lingkaran dangan jari-jari 50 cm, robot ini memerlukan waktu selama 16 detik, dengan kondisi seperti pada gambar 3c.
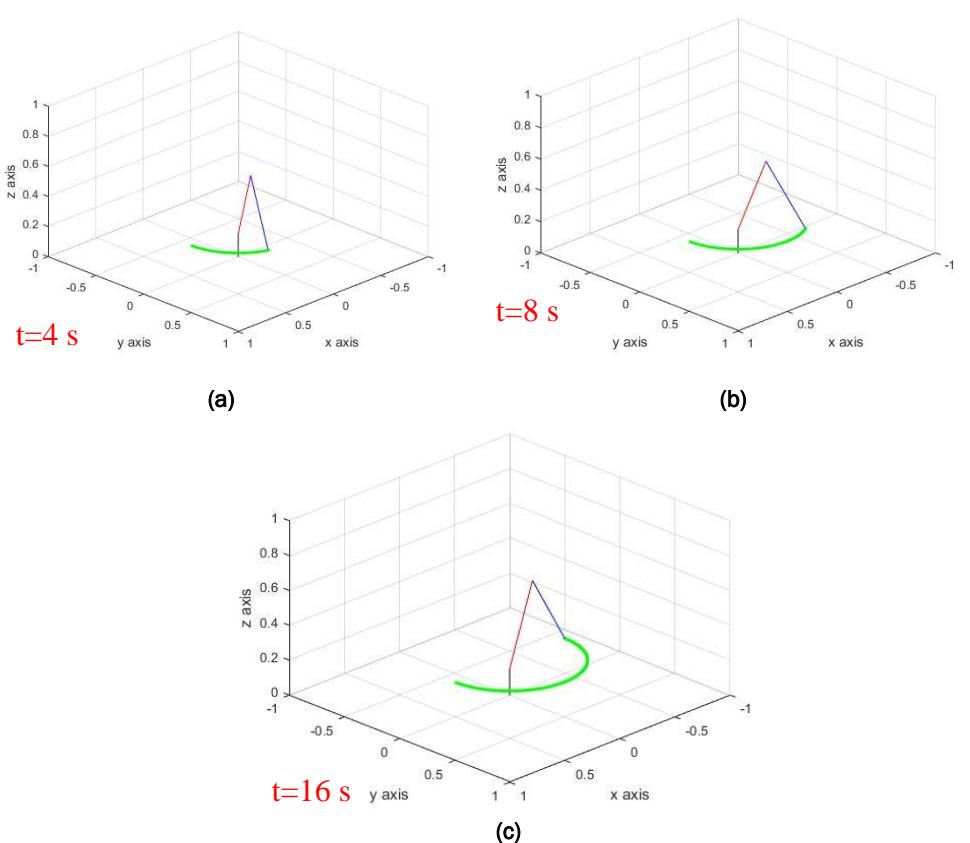
Gambar 3 Simulasi model robot dengan trayektori setengah lingkaran (Kp = 1, Ti=100, Td=2) (a) simulasi pada detik ke 4 (b) simulasi pada detik ke-8 (c) simulasi pada keseluruhan trayektori
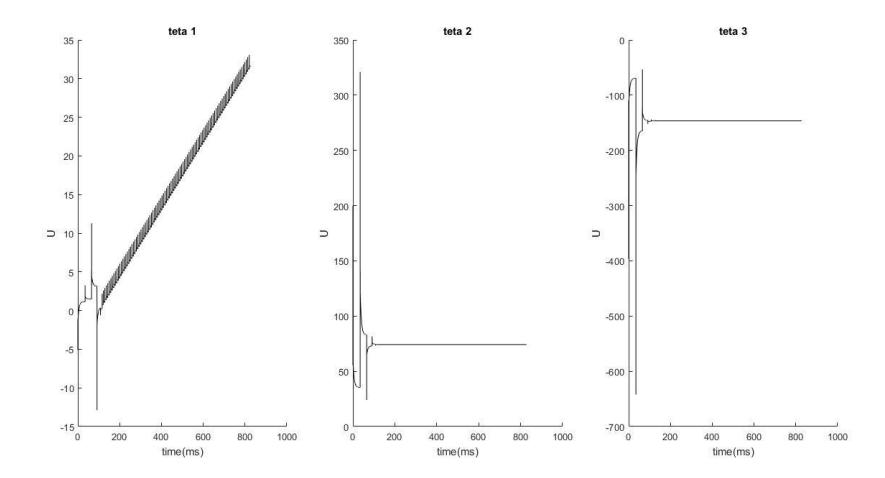
Pengontrolan pada robot ini menggunakan kontroller PID dengan nilai kp=1, ti= 100 dan td=2. Dari parameter tersebut didapatkan hasil pada gambar 4. Pada simulasi pengontrolan ini, parameter dari motor yang digunakan belum sesuai dengan parameter motor sesungguhnya. Tetapi dengan kondisi ini cukup mewakili sinyal kontrol yang akan diberikan pada kondisi nyata. Dari gambar 4 dapat dilihat bahwa tidak terdapat overshoot maupun osilasi yang cukup berarti pada plant. Hal ini sebenarnya tergantung pada trayektori yang diberikan, semakin halus perpindahan dari posisi awal ke posisi berikutnya
maka semakin halus pula sinyal kontrol yang diberikan. Tetapi dapat dilihat pada t=0.01 ms hingga t=0.25ms terjadi overshoot yang cukup tinggi. Hal ini disebabkan karena robot masih dalam proses penyesuaian dari posisi default ke posisi awal trayektori. Dari sinyal kontrol yang cukup tinggi ini menyebabkan perubahan koordinat yang cukup besar pada plant. Dapat dilihat pada gambar 5 dari t=0.01 ms hingga t=0.25ms. Hal ini cukup berbahaya jika diaplikasikan pada plant sebenarnya.
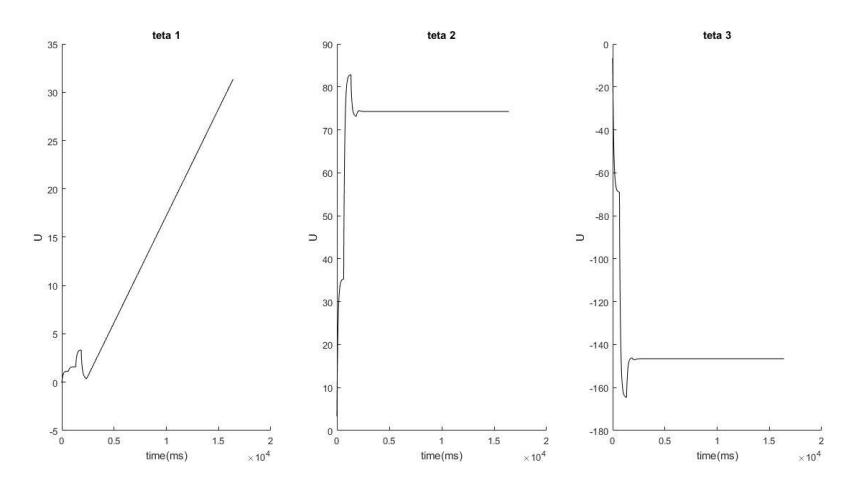
Gambar 4 Sinyal kontrol pada masing-masing motor selama satu periode trayektori (Kp = 1, Ti=100,Td=2)
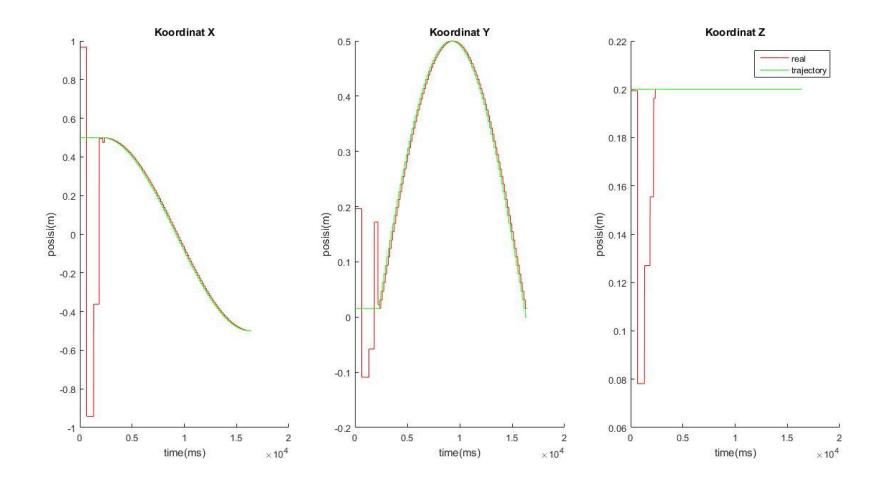
Gambar 5 Koordinat end effector selama satu periode trayektori (Kp = 1, Ti=100, Td=2)
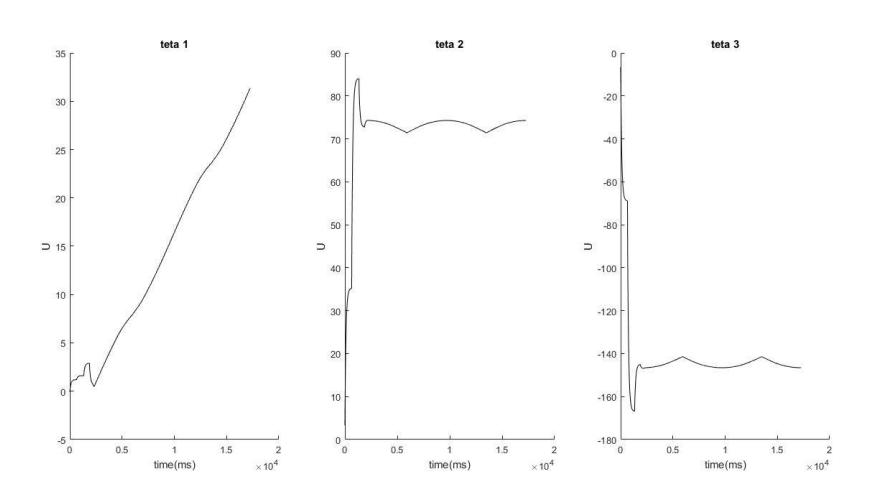
Karena pada pengujian ini menggunakan nilai default dari sudut sebesar 0.2 rad pada teta 1, 0.2 rad pada teta 2 dan -0.3 pada teta 3 yang dapat dilihat pada gambar 6 maka dengan menggunakan teknik forward kinematic, didapatkan koordinat end effector sebesar 0.89 pada sumbu x, 0.2 pada sumbu y dan 0.2 pada sumbu z. Sedangkan pada trayektori nilai koordinat yang diinginkan adalah 0.5 pada sumbu x, 0.02 pada sumbu y dan 0.2 pada sumbu z. Walaupun hanya terjadi sesaat, tetapi masalah ini perlu diatasi dengan skema kontrol lebih lanjut agar tidak membahayakan pasien. Pada t=0.25 ms dapat dilihat bahwa plant mulai dapat mengikuti trayektori dengan baik.
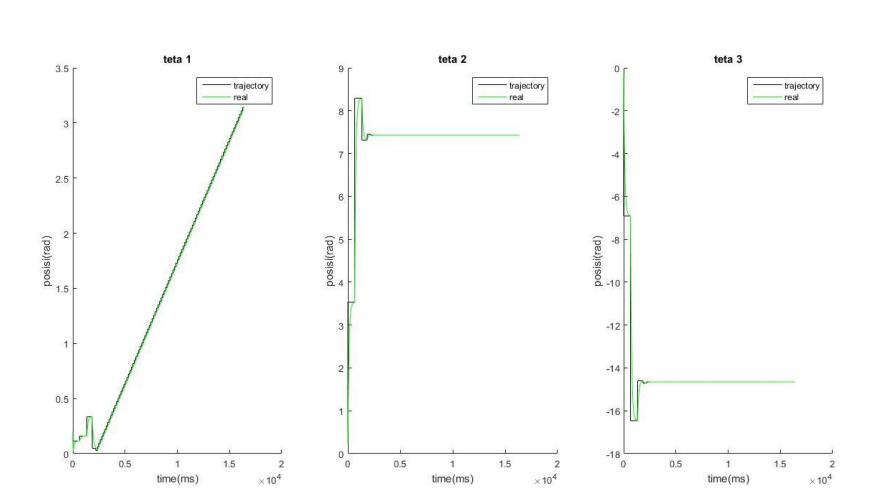
Gambar 6 Posisi kontrol pada masing-masing motor selama satu periode trayektori (Kp = 1, Ti=100, Td=2)
Kemudian pada trayektori ini diberikan gain control yang besarnya 20 kali dari besar gain control sebelumnya. Dapat dilihat pada gambar 7, terdapat overshoot yang cukup tinggi pada teta 1, teta 2 dan teta3. Hal ini dikarenakan nilai set point pada teta 6 selalu berubah. Berbeda dengan sinyal kontroller pada percobaan sebelumnya. Pada percobaan ini overshoot berlebihan hanya terjadi ketika posisi robot beranjak dari posisi awal ke posisi trayektori. Sedangkan ketika sudah mencapai titik trayektori yang masih terjadi overshoot hanya pada teta1. Overshoot ini tentunya akan berpengaruh pada pergerakan robot, yang membuat robot cenderung menjadi begertar. Tetapi karena overshoot terjadi dalam waktu yang sangat singkat, dapat dilihat pada gambar 8, pada end effector tidak terjadi getaran yang cukup berarti, tentunya hal ini akan dangat dipengaruhi oleh hardware yang digunakan nantinya.Dengan penambahan gain dapat dilihat bahwa waktu diperlukan robot untuk menjalankan satu periode trayektori menjadi lebih cepat, yakni 0.8 s (800ms). Dengan kecepatan ini, secara sertamerta mebuat torsi dari motor akan meningkat.
Gambar 7 Sinyal kontrol pada masing-masing motor selama satu periode trayektori (Kp = 20, Ti=100, Td=2)
Gambar 8 Koordinat end effector selama satu periode trayektori (Kp = 20, Ti=100, Td=2)
3.2 Trayektori setengah persegi
Pada pengujian ini digunakan trayektori panjang 1 meter dengan lebar 0.5 meter dengan ketinggian (sumbu z) sama dengan ketinggian pada pengujian sebelumnya, yakni 20 cm (0,2 m) dari base. Hasil pengujian dapat dilihat pada gambar 9. Pada pengujian ini waktu yang diperlukan untuk mejalankan satu periode trayektori adalah 18 s. Dari gambar 7 dapat dilihat bahwa garis hitam merepresentasikan link 1, garis merah merepresentasikan link 2, garis biru merepresentasikan link 3 dan garis hijau merepresentasikan trayektori yang harus dilewati. Ditinjau dari sinyal kontrolnya yang diberikan pada pada (gambar 10) pada trayektori persegi panjang ini, terjadi perubahan setpoint yang bervariasi sehingga mengakibatkan perubahan sinyal kontrol yang bervariasi juga. Sama halnya dengan pengujian trayektori stengah lingkaran, pada pengujian ini pada saat t=0.01 ms hingga t=0.25 ms terjadi perubahan yang cukup besar. Hal ini dikarenakan perubahan yang cukup besar dari titik default ke titik awal dari trayektori.
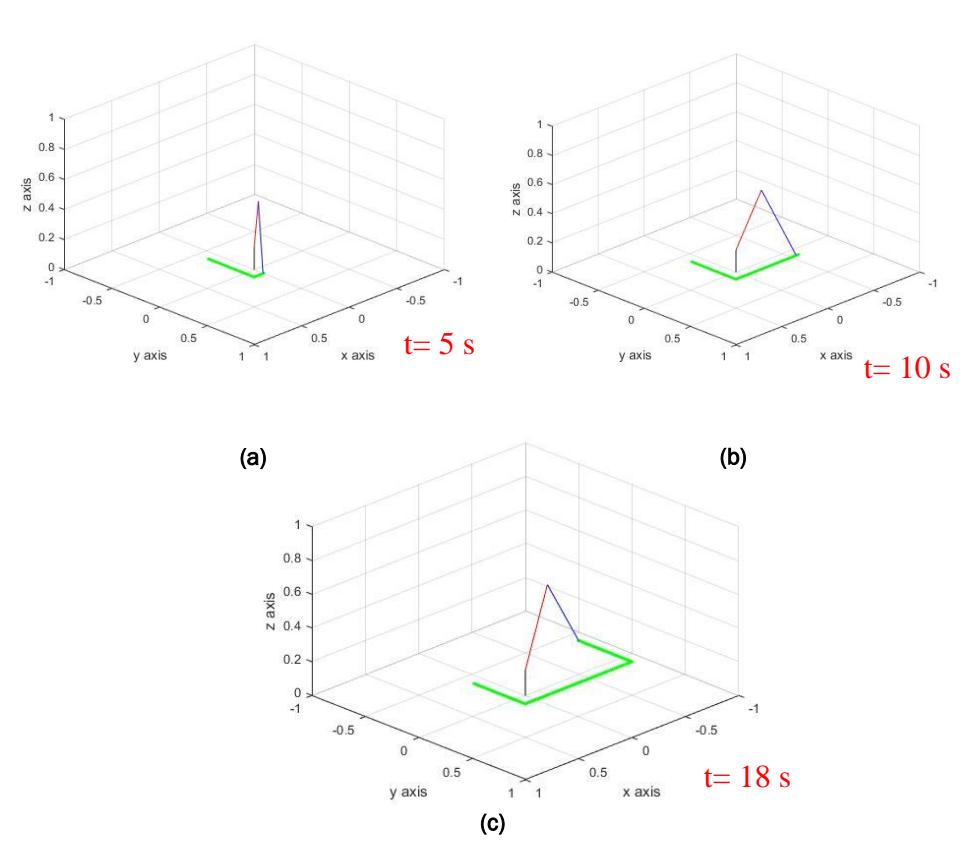
Gambar 9 Simulasi model robot full trayektori dengan trayektori setengah persegi panjang (Kp = 1, Ti=100, Td=2) (a) simulasi pada detik ke 5 (b) simulasi pada detik ke-10 (c) simulasi pada keseluruhan trayektori
Gambar 10 Sinyal kontrol pada masing-masing motor selama satu periode trayektori (Kp = 1, Ti=100, Td=2)
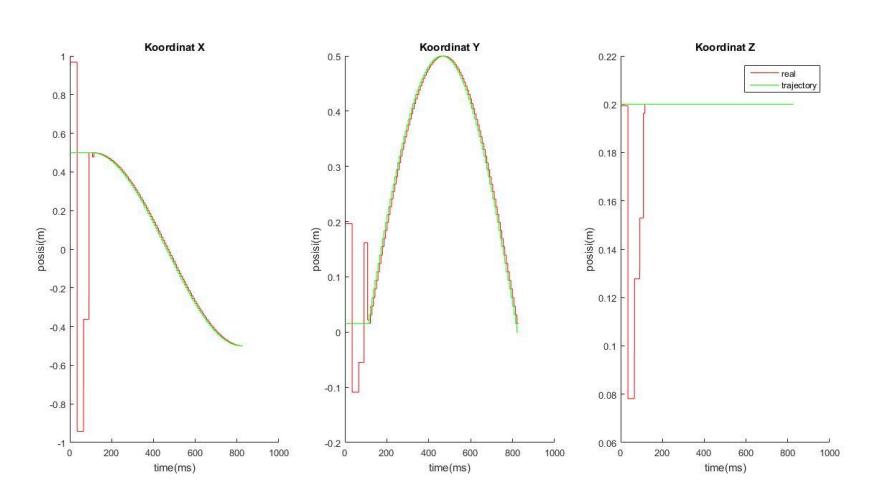
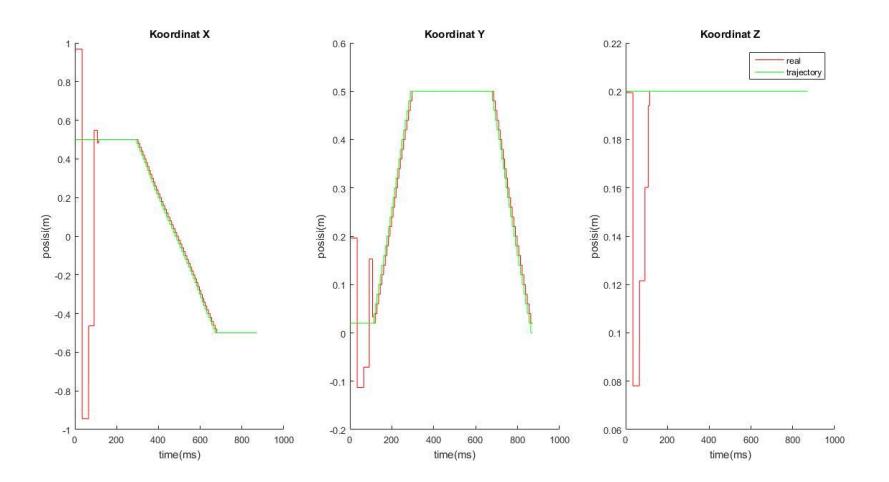
Dari sinyal kontrol yang diberikan, dihasilkankan posisi end effectror yang dapat dilihat pada gambar 11. Dapat dilihat bahwa end effector mulai mengikuti trayektori yang diinginkan ketika t=0.25. Meskipun pergerakannya masih tergolong kasar, tapi dengan torsi motor yang tidak terlalu besar dan batas eror dari kontroller diperkecil akan membuat pergerakan menjadi robot semakin halus. Tetapi dengan memperkecil batasan eror pada kontroller membuat robot berosilasi (bergetar) sehingga perlu ditetapkan batas nilai eror yang sesuai dengan kondisi motor dan beban yang akan digunakan. Untuk posisi sudut pada masing-masing motor dapat dilihat pada gambar 12. Dari gambar dapat dilihat bahwa nilai sebenarnya diwakilkan oleh garis hitam dan trayektori diwakilkan oleh garis hijau. Dapat dilihat pula bahwa dengan menggunakan trayektori persegi panjang nilai setpoint untuk kontroller memang fluktuatif, tetapi kontroller masih mampu mengikuti setpoint dengan baik.
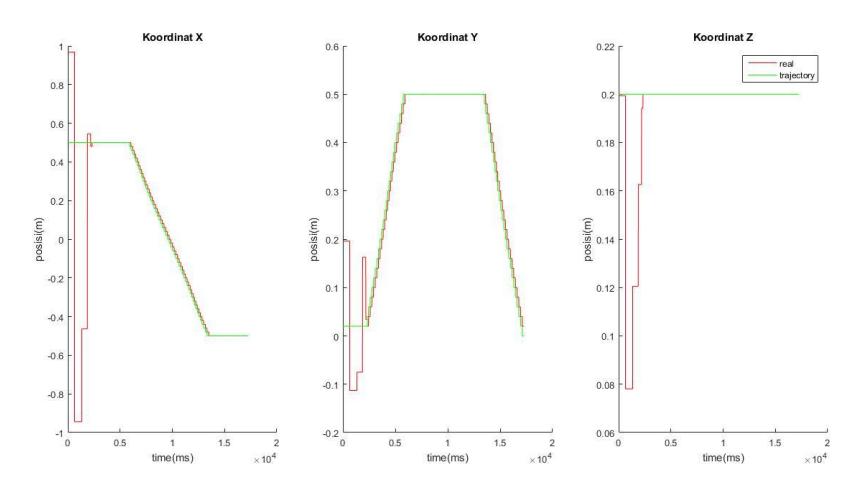
Gambar 11 Koordinat end effector selama satu siklus trayektori (Kp = 1, Ti=100, Td=2)
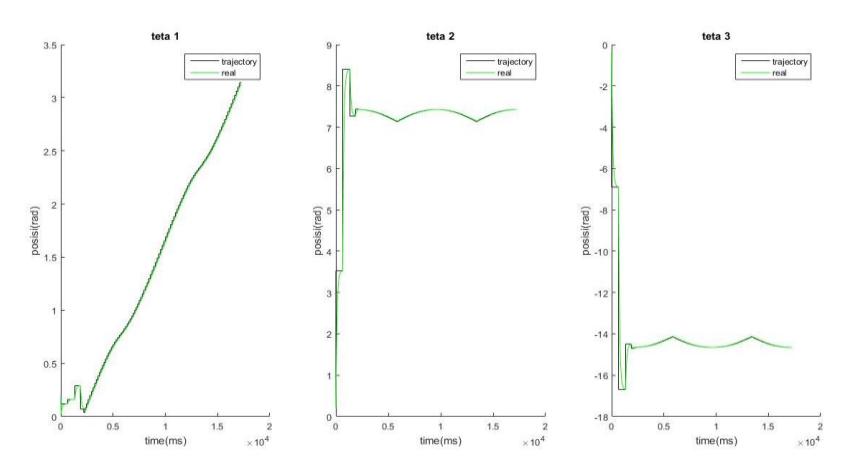
Gambar 12 Posisi kontrol pada masing-masing motor selama satu siklus trayektori (Kp = 1, Ti=100, Td=2)
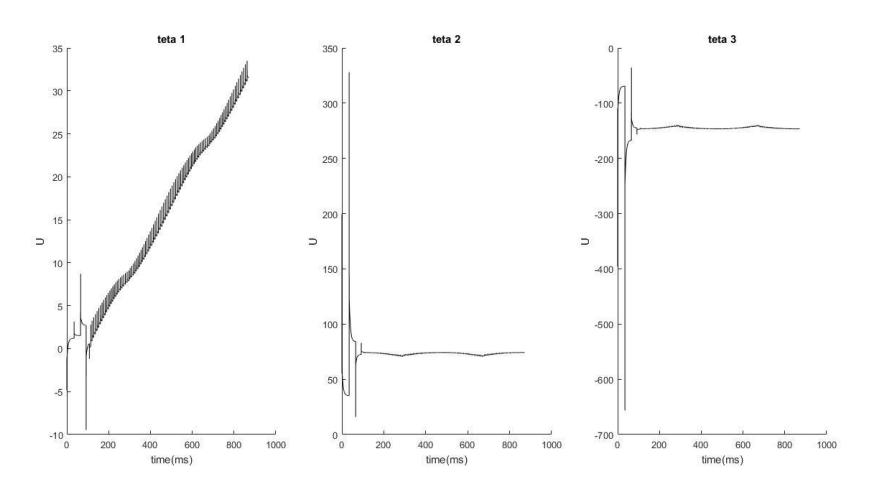
Dengan prosedur yang sama dengan pengujian 3.1, gain controller dinaikkan menjadi 20 kali lipat. Dan didapatkan hasil seperti pada gambar 13. Terlihat bahwa terdapat overshoot yang sangat tinggi, baik pada teta 1, teta 2 maupun teta 3. Fenomena ini yang disebut dengan proportional kick. Hal ini terjadi karena adanya perubahan setpoint yang begitu besar dalam waktu yang sangat cepat. Pada suatu plant, fenomena seperti ini harusnya dihindari karena dapat menyebabkan kerusakan pada sistem jika terjadi secara terus menerus. Ada beberapa teknik yang dapat digunakan untuk mengatasi hal ini, yaitu dapat dengan cara menaikkan komponen integral, atau dengan mengubah skema kontroller menjadi kontroller IPD.
Dengan ditambahkannya gain control ini pula dapat dilihat pada gambar 14, bahwa waktu yang diperlukan robot untuk menyelesaikan trayektorinya menjadi lebih cepat. Yaitu dari 18 s menjadi 0,9 s. Peningkatan ini juga berpengaruh pada torsi yang dkeluarkan motor. semakin besar sinyal kontrol yang diberikan maka torsi motor juga akan menjadi semakin besar, sehingga apabila pasien berada disekitar robot ketika robot menyesuaikan diri dari posisi default ke posisi trayektori akan menjadi sangat berbahaya.
Gambar 13 Sinyal kontrol pada masing-masing motor selama satu periode trayektori (Kp = 20, Ti=100, Td=2)
Gambar 14 Koordinat end effector selama satu periode trayektori (Kp = 20, Ti=100, Td=2)
4 Kesimpulan
Dari beberapa pengujian diatas dapat disimpulkan bahwa robot dengan kontroller PID sederhana mampu mengikuti trayektori stengah lingkaran dan setengah persegi dengan rentang 0.5 meter dan ketinggian 0.2 meter. Dengan menggunakan trayektori setengah lingkaran, waktu yang dibutuhkan adalah selama 16 s. Sedangkan waktu yang dibutuhkan robot untuk menyelesakan trayektori setengah persegi adalah 18 s. Hal ini dikarenakan pada trayektori setengah lingkaran set point dari kontroller terus berubah-ubah sehingga membuat kontroller memerlukan waktu yang lebih lama untuk menyelesaikan trayektori. Kemudian dengan mengubah gain kontrollernya didapatkan waktu yang lebih cepat yaitu dari 16 s menjadi 0.8 s pada setengah lingkaran dan dari 18 s menjadi 0.9 s. Tetapi dengan penambahan gain ini berakibat terjadinya proportional kick, terlebih pada taryektori setengah persegi. Penambahan gain ini perlu dilakukan ketika syaraf-syaraf dari pasien sudah mulai berfungsi, sehingga dapat ditingkatkan kecepatan maupun gayanya. Dari beberapa percobaan yang pernah dilakukan, waktu ketika robot dari posisi default ke posisi trayektori perlu dilakukan skema pengkontrolan khusus. Kaena pada waktu ini, robot bergerak dengan torsi maksimal untuk mencapai trayektorinya dalam waktu yang singkat.
5 Referensi
- [1] Sedyaningsih, E.R., Stroke penyebab utama kematian di Indonesia. Sambutan Menkes pada Peringatan Hari Stroke Sedunia. 2011.
- [2] Hariandja, Johanna R.O. Identifikasi Kebutuhan akan sistem rehabilitasi berbasis teknologi terjangkau untuk penderita stroke diIndonesia. LPPM Universitas Katolik Parahyangan, No: III/LPPM/2013-03/15-P. 2013
- [3] Dalgas, U., Stenager, E., Ingemann-Hansen, T., Multiple sclerosis and physical exercise: recommendations for the application of resistance-, endurance- and combined-training. Multiple Sclerosis, 14 (1): 35-53, 2008.
- [4] Kwakkel, G., Wagenaar, R. C., Twisk, J. W., Lankhorst, G. J., dan Koetsier, J. C., Intensity of leg and arm training after primary middle-cerebral-artery stroke: a randomized trial. The Lancet, 354 (9174): 191-196,1999.
- [5] Siciliano, B. and O. Khatib. Springer Handbook of Robotics. Springer Berlin Heidelberg, ISBN: 978-3-540-23957-4, pp: 1611, 2008
- [6] Fu, K.S., R.C. Gonzalez and C.S. Lee. Robotics: Control, Sensing, Vision and Intelligence. 1st Edn., McGraw-Hill, New York, ISBN 10: 0070226253, pp: 58, 1987
- [7] Ferrell, W.R. and T.B. Sheridan. Supervisory control of remote manipulators. IEEE Spect., 4: 81-88, 1967.
- [8] Patarinski, S.P and R. Botev. Robot force control: A review. Mechatronics, 3: 377-398, 1993.
- [9] Zheng, G. and A. Hemami. An overview of robot force control. Robotica, 15: 473-482. 1997.
- [10]De Schutter, J., H. Bruyninckx, W.H. Zhu and M.W. Spong,. Force Control: A Bird's Eye View. In: Control Problems in Robotics and Automation, Siciliano and Valavanis (Eds.). Springer, London UK, pp: 295,1998.
- [11]J. Hammel, K. Hall, D. Lees, L. Leifer, H. F. M. van de Loos, I. Perkash, R. Crigler, Clinical evaluation of a desktop robotic assistant. Journal of Rehabilitation Research & Development pp.1-16,1989.
- [12]C. A. Stanger, C. Anglin, W.S. Harwin, et al. Devices for assisting manipulation: A summary of user task priorities. IEEE Transactions on Rehabilitation Engineering, pp. 256-65, 1994.
- [13]Burgar CG, Lum PS, Shor PC, and Machiel Van der Loos HF. Development of robots for rehabilitation therapy: the Palo Alto VA/Stanford experience. Journal of Rehabilitation Research & Development 37: 663-736, 2000.
- [14]Krebs HI, Hogan N, Aisen ML, and Volpe BT. Robot-aided neurorehabilitation. Rehabilitation Engineering, IEEE Transactions on [see also IEEE Trans on Neural Systems and Rehabilitation] 6: 75-87, 1998.
- [15]Gaber, A.N.A.E, Sohair F. Rezeka, H.A.El Gamal. Design and position control arm manipulator; exeprimently and in MATLAB SimMechanics. International Journal of Engineering Research. vol. 5 no.8, pp: 352-359, 2016