
1 Pendahuluan
Gelombang ultrasonik adalah gelombang akustik dengan frekuensi di atas 20 kHz. Ultrasonik memiliki panjang gelombang yang pendek, sehingga dapat dipantulkan pada benda dengan luas permukaan yang sangat sempit. Selain itu gelombang ultrasonik merambat dengan baik di dalam medium cair dan berbagai media padat. Saat ini berbagai aplikasi ultrasonik telah berkembang dengan pesat seperti aplikasi untuk pengukuran besaran fisika di industri, uji tak merusak bahan untuk mengetahui apakah terdapat cacat dan kualitas bahan tersebut hingga aplikasi di bidang kedokteran seperti pencitraan ultrasonik untuk memandu jarum suntik dan sebagainya [1][2][3].
Salah satu pemanfaatan gelombang ultrasonik adalah pada akustik di dalam air (underwater acoustics), khususnya di dalam air laut. Gelombang ultrasonik merambat di dalam air laut dengan kecepatan (speed of sound) yang tergantung kepada beberapa parameter seperti temperatur, salinitas, kedalaman dan garis lintang (latitude) [4][5]. Oleh karena itu gelombang ultrasonik dapat dimanfaatkan pada berbagai aplikasi seperti pemetaan kontur dasar laut, deteksi dan pencarian objek yang tenggelam di laut dan aplikasi lainnya
Makalah ini membahas suatu studi empirik pengukuran gelombang ultrasonik di dalam air laut. Studi dilakukan pada perangkat simulator di laboratorium yang dikembangkan untuk keperluan studi penerapan gelombang ultrasonik atau akustik pada umumnya di dalam air laut. Perangkat yang digunakan menggunakan air laut sebagai media dan menggunakan
pasir laut sebagai dasar laut. Pengukuran ultrasonik dilakukan untuk mendapatkan kedalaman air laut, kontur dasar laut dan deteksi objek pada dasar air laut.
2 Gelombang Ultrasonik di Dalam Air
Gelombang ultrasonik merupakan gelombang mekanik, sehingga memerlukan medium yang elastis untuk merambat. Gelombang ultrasonik lebih mudah merambat di dalam air dibandingkan di udara, dan kecepatan propagasi gelombang akustik di dalam air dapat mencapai empat hingga lima kali kecepatannya di udara. Selain itu atenuasi di dalam air juga lebih kecil, sehingga gelombang ultrasonik dapat berpropagasi pada jarak yang relatif jauh. Gelombang ultrasonik mengalami atenuasi selama berpropagasi pada jarak tertentu. Atenuasi adalah pengurangan intensitas gelombang terhadap jarak tempuh yang disebabkan oleh adanya absorpsi energi oleh medium perambatan. Semakin tinggi frekuensi gelombang, semakin besar atenuasi yang terjadi.
Pola radiasi gelombang ultrasonik dibagi atas medan suara dan sudut penyebaran berkas gelombang. Transduser ultrasonik memiliki daerah dengan nilai amplitudo gelombang yang fluktuatif, yang disebut medan dekat seperti ditunjukkan pada Gambar 1.a. Medan dekat (N) bergantung kepada diameter kristal piezoelektrik (D) dan panjang gelombang yang dihasilkan transduser (). Daerah di luar medan dekat disebut medan jauh, yang memiliki nilai amplitudo yang lebih stabil. Dalam pengukuran, objek sebaiknya diletakkan pada daerah medan jauh agar hasil yang diperoleh lebih akurat.
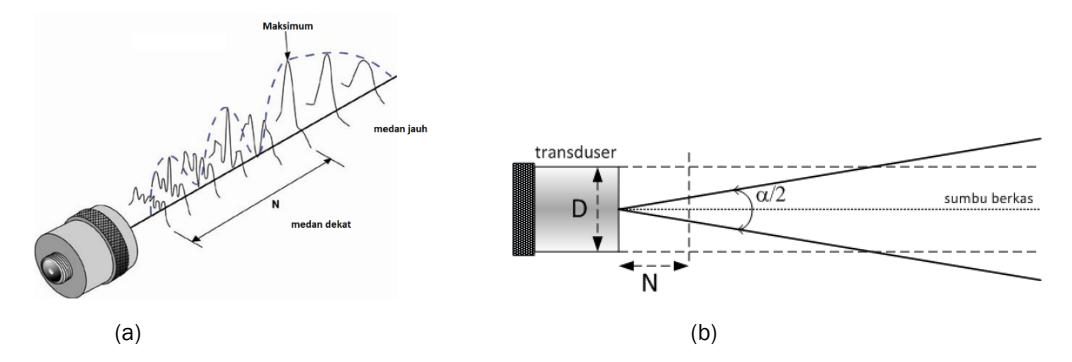
Gambar 1. Medan dekat transduser dan sudut penyebaran gelombang
Sudut penyebaran berkas gelombang ditunjukkan pada Gambar 1.b dan Persamaan 1, dengan \(\alpha\) adalah sudut penyebaran.
\[\sin\left(\frac{\alpha}{2}\right) = 1,22\frac{\lambda}{D} \tag{1}\]
Secara empiris, Coppens [4] telah menurunkan persamaan untuk menghitung kecepatan propagasi gelombang akustik dalam air. Rentang validitas dari persamaan tersebut yaitu untuk temperatur 0° - 35°C, salinitas 0 – 45 ppt, dan kedalaman 0 – 4000 meter [4]. Persamaan Coppens dituliskan sebagai berikut,
\[c(h,S,t) = c(0,S,t) + (16,23+0,253t)h + (0,213-0,1t)h^{2} + [0,016+0,0002(S-35)](S-35)th\] \[c(0,S,t) = 1449,05+45,7t-5,2t^{2}+0,23t^{3}+(1,333-0,126t+0,009t^{2})\] \[(S-35)\] (1)
Keterangan: t = T/10, dengan T=temperatur (°C)
S = salinitas (ppt atau part per thousand)
h = jarak kedalaman (m)
Transduser yang digunakan pada pengukuran di dalam air adalah jenis immersed transducer atau transduser yang diletakkan di dalam air. Tranduser pengirim mentransmisikan gelombang akustik yang dipantulkan dasar laut dan diterima kembali oleh transduser penerima yang ditunjukkan pada Gambar 2. Metode bistatik menggunakan dua transduser, masing-masing sebagai transmitter dan receiver. Persamaan 2 digunakan dalam menghitung kedalaman air atau letak kedalam suatu objek
Gambar 2. Pengukuran dengan transduser ultrasonik
\[h = s\cos\theta = \frac{a/2}{\tan\theta} \tag{2}\]
dimana, a = jarak antar transduser (m)
\(\theta\) = sudut datang gelombang (°)
x = jarak tempuh gelombang (m)
3 Eksperimen
3.1 Perangkat Eksperimen
Untuk melakukan eksperimen pengukuran di dalam air digunakan perangkat dengan konfigurasi sistem seperti ditunjukkan pada Gambar 3. Sistem pengukuran terdiri atas pulser, transduser pengirim dan transduser penerima, atenuator, osiloskop dan komputer. Pulser mengirim sinyal berupa pulsa ke transduser pengirim untuk membangkitkan gelombang ultrasonik yang akan dirambatkan melalui objek. Pulser atau generator sinyal yang digunakan adalah Krautkramer-Branson USIP12 dengan tegangan pembangkit sebesar 220V. Selanjutnya gelombang ultrasonik dideteksi oleh transduser penerima. Kedua sinyal baik dari transduser pengirim dan transducer penerima diamati pada osiloskop dan dikirim ke komputer untuk diolah lebih lanjut.
Untuk mensimulasikan pengukuran kondisi di dalam air laut, digunakan wadah seperti pada Gambar 4. Wadah berukuran 0,35 m x 0,22 m x 0,25 m, yang akan diisi dengan pasir laut pada dasar dan air laut hingga ketinggian tertentu. Pada bagian atas diletakkan dua transduser berbentuk silinder, model Sonatest IMG 2550 jenis immersion dengan ukuran diameter 6,35 mm dan frekuensi gelombang ultrasonik 5 MHz, yang satu difungsikan sebagai transduser pengirim dan satu lainnya sebagai transduser penerima. Kedua transduser tersebut dapat digerakkan dalam bidang 2-dimensi atau dalam bidang xy.
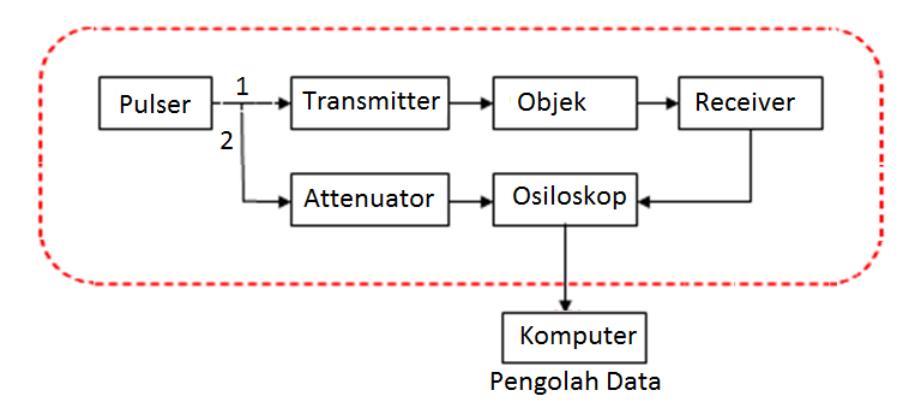
Gambar 3. Konfigurasi umum sistem pengukuran
Pada studi eksperimen ini, percobaan pertama yang dilakukan adalah pengukuran kedalaman air dengan menampilkan informasi berupa kedalaman air dan gambar kontur permukaan dasar air. Percobaan kedua adalah mendeteksi keberadaan suatu objek di permukaan dasar air. Sebelum kedua percobaan dilakukan, perlu dilakukan pengujian transduser atau kalibrasi transduser untuk mendapatkan referensi kecepatan gelombang ultrasonik di dalam air.
Gambar 4. Wadah untuk percobaan pengukuran akustik dalam air
3.2 Pengujian Transduser
Pengujian transduser atau kalibrasi ditunjukkan pada Gambar 5. Pada pengujian ini digunakan wadah uji yang merupakan balok akrilik dengan ukuran 16,6 cm x 4,5 cm x 4,0 cm. Transduser diletakkan pada jarak 11 cm dan wadah uji diisi air agar gelombang ultrasonik merambat dari transmitter ke receiver seperti kondisi pada saat penggunaan. Pengukuran dilakukan 20 kali dan dilanjutkan dengan pengolahan sinyal sehingga diperoleh 20 nilai time of flight (t). Dari pengukuran yang dilakukan diperoleh bahwa nilai kecepatan referensi secara empirik sebesar 1479 m/s.
Gambar 5. Wadah uji pengujian transduser
3.3. Pengukuran Kedalaman Air dan Kontur Permukaan Dasar
Perangkat percobaan berupa wadah dengan rel penggerak transduser ditunjukkan pada Gambar 6.a. Untuk pengukuran kedalaman air, wadah uji diisi air bersuhu 25o C dengan kedalaman 14,6 m dan dibuat kontur pasir yang memiliki bentuk bukit dan lembah. Sudut transduser θ sebesar 20° dan jarak antar muka transduser a sebesar 6 cm. Gambar 6.b. menunjukkan ilustrasi pola perambatan gelombang ultrasonik yang dirambatkan dari transmitter dengan sudut 20o. Kondisi permukaan dasar air untuk percobaan ini ditunjukkan pada Gambar 6.c.
Untuk pemetaan permukaan dasar air atau kontur dasar air, transduser diletakkan pada posisi-posisi pada bidang x-y seperti pada Gambar 7. Transduser penerima dan transduser pengirim diletakkan pada posisi, dengan skala sumbu-x dari 1 hingga 29 dan skala sumbu y dari 1 hingga 14. Dengan jarak antara transduser pengirim dan transduser penerima sebesar 6 cm, diperoleh bahwa posisi transduser penerima berada pada titik x+11 untuk suatu posisi transduser pengirim. Dengan demikian posisi maksimum transduser pengirim pada sumbu-X adalah pada x= 18 dimana posisi maksimum transduser penerima adalah x = 29.
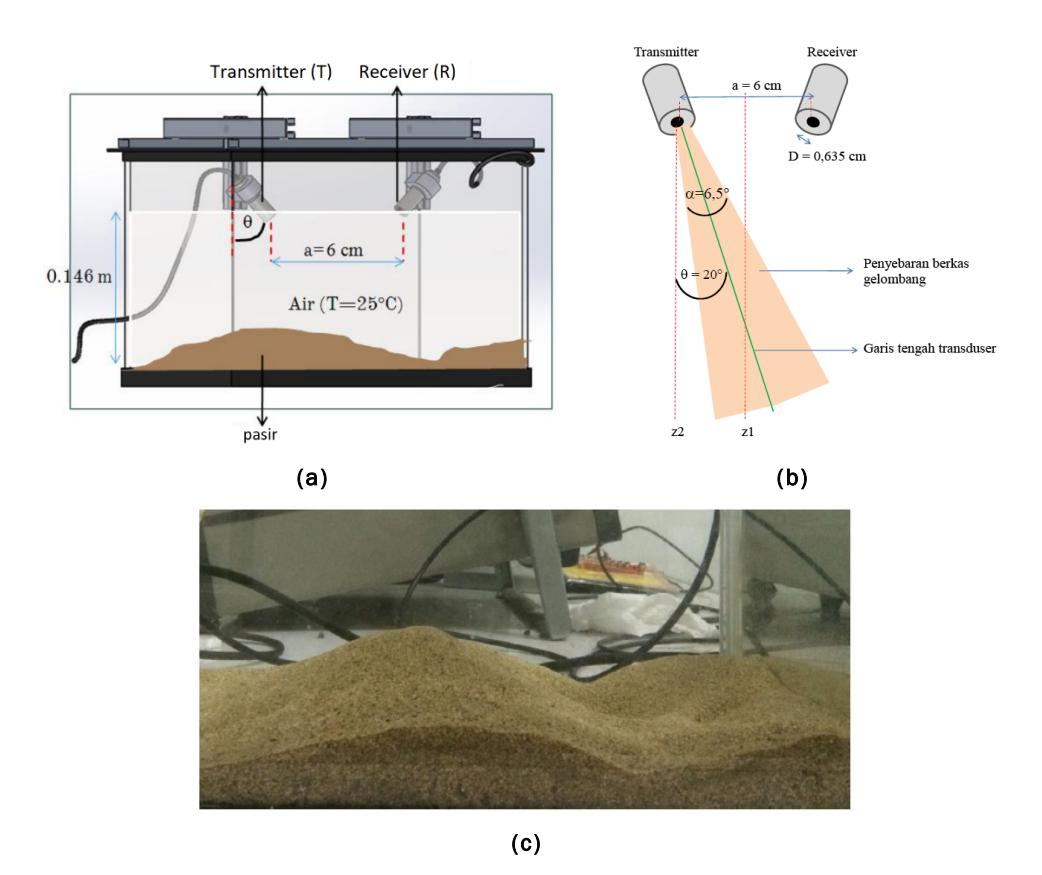
Gambar 6. Perangkat pengukuran kedalaman air dan kontur permukaan dasar air
Gambar 7. Posisi transduser pada pemetaan kontur
3.4. Deteksi Objek
Pada pendeteksian objek dalam air, kontur pasir diratakan dan diatasnya diletakkan objek uji seperti pada Gambar 8. Pengukuran dilakukan pada ketinggian ℎ!. Selanjutnya dicari nilai amplitudo tegangan karakteristik pada transduser penerima untuk setiap objek uji (pelat baja, pelat aluminium, dan kabel plastik) untuk ketinggian h1, h2 dan h3 (h1=15,3 cm; h2=14,3 cm; h3=13,3 cm), seperti yang ditunjukkan Gambar 8. Posisi peletakkan objek diperlihatkan pada Gambar 9. Rentang amplitudo tegangan transduser penerima untuk masing-masing objek dijadikan referensi untuk pemetaan berbagai macam objek.
Gambar 8. Perangkat percobaan pendeteksian objek
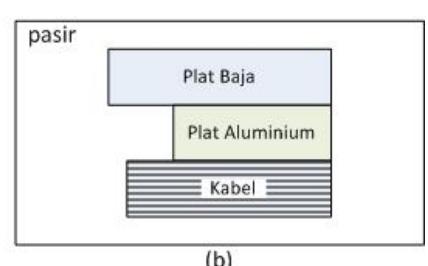
Gambar 9. Peletakkan objek, (a) pelat baja, (b) semua objek uji
4 Hasil dan Analisis
Sebagai referensi, kecepatan ultrasonik di dalam air yang diperoleh dari kalibrasi adalah 1479 m/s. Pada hasil pengujian transduser tersebut terdapat perbedaan nilai kecepatan teoretis dengan kecepatan hasil eksperimen sebesar 13 m/s. Selisih nilai tersebut dikarenakan pada perhitungan Cteoritis yang menggunakan penyederhanaan persamaan Coppens dan asumsi nilai salinitas air sama dengan nol. Kesalahan (error) pada nilai pengukuran memang tidak dapat dihindari, karena kondisi eksperimen pada saat penurunan persamaan teoretis tidak sama dengan kondisi pada saat pengujian transduser.
Sedangkan pengukuran kedalaman air dengan menggunakan penggaris sebagai referensi diperoleh hasil untuk 54 titik pengukuran dengan kedalaman maksimum atau terdalam sebesar 10,6 cm dan kedalaman minimum atau terdangkal 6,8 cm. Dari pengukuran yang dilakukan, kedalaman air di dalam wadah ditampilkan dalam bentuk citra 2-dimensi dan citra 3-dimensi pada Gambar 10.
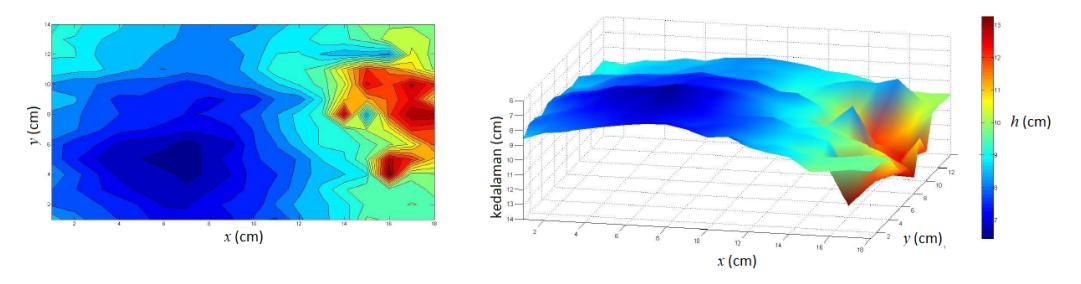
Gambar 10. Hasil pemetaan kontur permukaan pasir, (a) pemetaan 3D, (b) pemetaan 2D
Pada pengukuran kedalaman air, nilai waktu tempuh gelombang dari hasil pemrograman menggunakan asumsi bahwa waktu tempuh gelombang sebagai waktu bolak-balik gelombang dari transduser ke objek. Dengan mempertimbangkan sudut penyebaran berkas gelombang (α) 6,5, asumsi nilai θ=20°, dan a=6 cm, diperoleh bahwa nilai h yang dapat terdeteksi oleh perangkat ukur adalah 6,7 – 10 cm. Masih terdapat beberapa nilai yang berada di luar rentang tersebut. Hal ini disebabkan adanya faktor asumsi dan faktor mekanis, yaitu sudut datang gelombang diasumsikan konstan dan terjadi perubahan sudut
transduser selama pengukuran. Meskipun demikian, perbandingan hasil pemrograman kontur permukaan pasir dengan kontur pasir yang sebenarnya menunjukkan kemiripan berupa adanya bentuk bukit dan lembah.
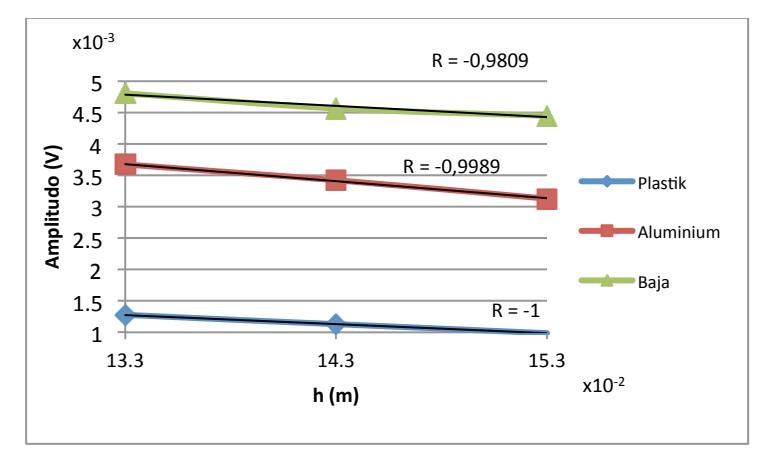
Untuk percobaan pendeteksian objek, dilakukan dengan pengukuran amplitudo tegangan maksimum pada target objek. Hasil pengukuran amplitudo tegangan untuk setiap target objek ditunjukkan pada Tabel 1. Hubungan antara variabel kedalaman (h) dan amplitudo (A) ditunjukkan pada grafik pada Gambar 11.
Dari pengukuran diperoleh adanya perbedaan yang signifikan pada nilai amplitudo tegangan untuk target objek berupa pasir dan baja. Setelah dicitrakan, objek baja dan pasir dapat dibedakan dengan jelas. Dari hasil pengukuran diketahui bahwa amplitudo tegangan maksimum sinyal pantul merupakan parameter yang berpengaruh dalam pendeteksian objek menggunakan ultrasonik. Selain dapat mendeteksi objek, pencitraan objek bawah air menggunakan gelombang ultrasonik ternyata dapat memperkirakan dimensi dari objek. Dimensi lebar pelat baja dapat diperkirakan dari citra tersebut, yaitu sekitar 4,5 cm (nilai sebenarnya adalah 4,7 cm). Dari hasil pengukuran dapat diketahui bahwa terdapat hubungan antara variabel h dan A, yaitu ℎ ∝ ! ! .
Rentang amplitudo karakteristik (!) tegangan pada target objek pelat baja, pelat aluminium, dan kabel plastik pada h=13,3 cm yang diperoleh dari hasil pengukuran adalah:
- pelat baja : (4,27 s/d 5,04) x 10-3 V, dengan nilai rata-rata dengan standar deviasi (4,73±0,408) x 10-3 V
- pelat aluminium: (3,55 s/d 4,26) x 10-3 V, dengan nilai rata-rata dengan standar deviasi (3,85±0,370) x 10-3 V
- kabel plastik adalah (1,04 s/d 1,36) x 10-3 V, dengan nilai rata-rata dengan standar deviasi (1,22±0,163) x 10-3 V
Tabel 1. Data perhitungan amplitudo maksimum objek
| x10-2 h (m) | Amplitudo x10-3 (V) | ||
|---|---|---|---|
| Plastik | Aluminium | Baja | |
| 13,3 | 1,22 | 3,85 | 4,73 |
| 14,3 | 1,13 | 3,42 | 4,56 |
| 15,3 | 0,99 | 3,13 | 4,45 |
Dengan referensi rentang amplitudo tegangan untuk suatu target objek uji yang telah diperoleh, pencitraan berbagai macam objek dilakukan dan hasilnya ditunjukkan pada Gambar 13.
Grafik pada Gambar 12 menunjukkan hubungan variabel h dan A yang linier. Data pada Tabel 1 digunakan sebagai referensi rentang amplitudo karakteristik tegangan untuk
target objek pada skala eksperimen. Hasil pemetaan pada Gambar 13 cukup merepresentasikan letak objek yang sebenarnya. Dari hasil yang diperoleh, diketahui bahwa rentang amplitudo tegangan pada suatu target objek dapat digunakan dalam pemetaan berbagai jenis material.
Gambar 12. Grafik perhitungan amplitudo maksimum objek
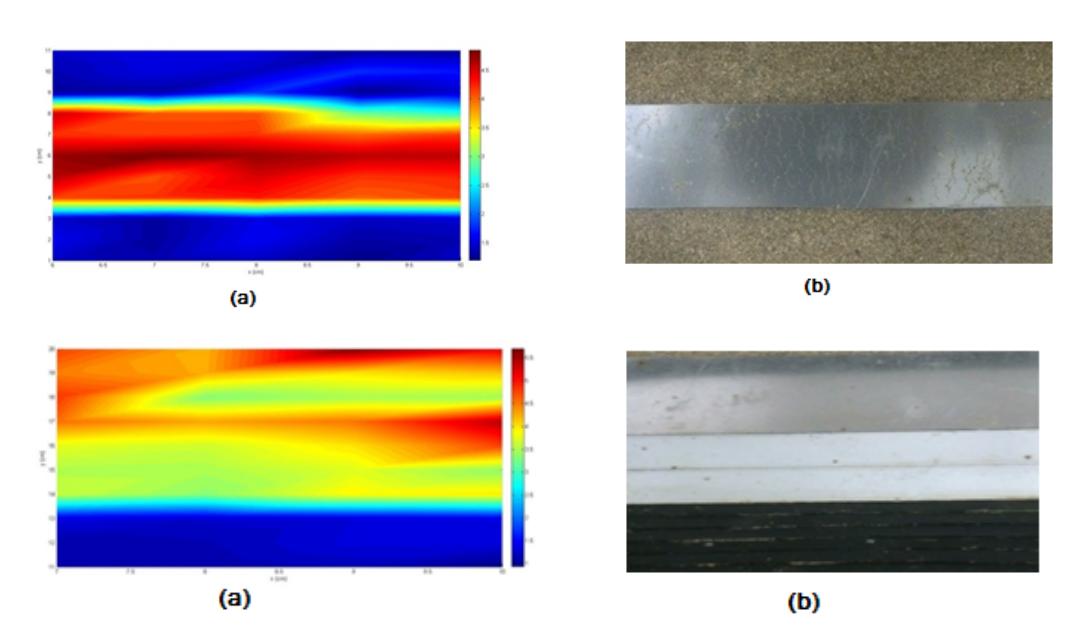
Gambar 13. Citra objek, (a) objek plat baja , (b) objek plat baja, aluminium & plastik
5 Kesimpulan
Dari studi yang dilakukan, terdapat beberapa kesimpulan sebagai berikut,
- 1. Berdasarkan percobaan, pengukuran kedalaman air dan pendeteksian objek dalam air dengan menggunakan transduser ultrasonik dipengaruhi oleh parameter sudut penyebaran berkas gelombang ultrasonik yang dihasilkan oleh transmitter dan jarak antar transduser.
- 2. Pada pendeteksian objek dalam air, objek-objek yang memiliki perbedaan massa jenis memantulkan gelombang dengan nilai amplitudo tegangan maksimum yang berbeda.
- 3. Nilai rentang amplitudo tegangan karakteristik suatu target objek dapat digunakan untuk mendeteksi sekaligus memetakan keberadaan objek yang berbeda dalam air.
- 4. Hasil percobaan sudah sesuai dengan teori, yaitu ℎ ∝ ! !! pada pendeteksian objek dengan kedalaman berbeda.
- 5. Pengambilan data pada dengan metode average acquisition menghasilkan nilai pengukuran yang lebih baik yaitu hubungan antara kedalaman objek dan amplitudo tegangan maksimum receiver objek lebih linier.
6 Daftar Pustaka
- [1] K. Amri, E Juliastuti & D Kurniadi, Asymmetric flow velocity profile measurement using multipath ultrasonic meter with neural network technique, the 5th International Conference on Instrumentation, Control and Automation (ICA), 2017.
- [2] E. Juliastuti, E. W. Tanogono & D. Kurniadi, Detection of water content in lubricating oil using ultrasonics, the 5th International Conference on Instrumentation, Control and Automation (ICA), 2017.
- [3] H. Susanti, Suprijanto &D. Kurniadi, Two-dimensional mapping of needle visibility with linear and curved array for ultrasound-guided interventional procedure, AIP Conference Proceedings vol. 1933, 2018
- [4] A. B. Coppens, Simple equations for the speed of sound in Neptunian waters, J. Acoust. Soc. Am. 69, 862-863, 1981
- [5] C.C. Leroy, S. P. Robinson & M. J. Goldsmith, A new equation for the accurate calculation of sound speed in all oceans, J. Acoust. Soc. Am., 124 (5), 2774/2782, 2008
- [6] T. G. Leighton & R. C. P. Evans, The Detection by sonar of difficult targets (Including centimetre-scale plastic objects and optical fibres) buried in saturated sediment, Applied Acoustics 69, p. 438/463, 2008
- [7] X. Lurton, An Introduction to Underwater Acoustics: Principles and Applications. Chichester: Praxis Publishing Ltd, 2002.
- [8] J. D. N. Cheeke, Fundamental and Applications of Ultrasonic Waves. Boca Raton: CRC Press LLC, 2002.
- [9] L. E. Kinsler, A. R Frey, A. B. Coppens & J. V. Sanders Fundamentals of Acoustics. John Wiley & Sons, Inc., 2000.
- [10] Scmerr Jr., Lester W., Ultrasonic Nondestructive Evaluation System : Models and Measurements, New York: Springer, 2007.