
1 Pendahuluan
Saat ini, kebutuhan akan alat-alat kesehatan (alkes) di Indonesia sudah menjadi sangat tinggi. Akan tetapi, perkembangan alat-alat kesehatan di dalam negeri ternyata tidak serta merta terdorong dengan baik [1]. Menurut data dari [2] diketahui bahwa jumlah produk impor untuk alat kesehatan yang saat ini beredar di Indonesia berjumlah 91,8%, sedangkan produk alkes yang berasal dari dalam negeri hanya 8,2% saja. Alkes yang beredar di Indonesia ini, tidak seluruhnya merupakan perangkat dengan teknologi tinggi, tetapi ada juga alat-alat yang bersifat penunjang, seperti kursi roda, tempat tidur, lampu, dan alat-alat penunjang lainnya. Dari seluruh alkes yang beredar, hanya sebagian kecilnya saja yang merupakan alkes yang dikhususkan untuk pelaksanaan terapi rehabilitasi fisik. Fasilitas terapi rehabilitasi fisik ini sebagian besar hanya berada di rumah sakit dengan kapasitas pasien yang juga tinggi. Selain jumlah alkes untuk terapi rehabilitasi fisik yang tidak tersebar secara merata, jumlah tenaga terapi fisik pun menjadi suatu masalah yang cukup mengkhawatirkan. Berdasarkan data dari Kementerian Kesehatan Republik Indonesia di tahun 2017 [3] terlihat bahwa ada perbedaan yang juga sangat signifikan antara besarnya kebutuhan tindakan terapi rehabilitasi fisik dengan jumlah tenaga terapis yang tersedia di
lapangan. Hal ini tentu saja akan memberikan dampak langsung pada pasien yang membutuhkan tindakan terapi rehabilitasi fisik, seperti terapi pasca-stroke ataupun pasca kecelakaan. Pemulihan akan berlangsung lebih lama bagi pasien yang tidak menjalani terapi dibandingkan pasien yang langsung menjalani terapi fisik [4].
Fasilitas untuk terapi rehabilitasi fisik yang saat ini ada dan digunakan secara regular di rumah sakit Indonesia umumnya masih bersifat konvensional dan tidak memanfaatkan teknologi otomasi [5]. Kalaupun alkes dengan teknologi otomasi telah tersedia, sebagian besar alkes tersebut merupakan alkes berbasis sistem elektrik-mekanik yang masih sangat mengandalkan motor sebagai penggerak utamanya. Akan tetapi, umumnya fasilitas-fasilitas itu baru berkembang di negara-negara benua Eropa, Amerika, dan Asia Utara, dan belum banyak ada di Indonesia. Sementara itu, perkembangan teknologi sejenis di dalam negeri masih sangat minim dan sangat membutuhkan bantuan pemerintah agar atmosfer dan geliat penelitiannya dapat menjadi semakin nyata realisasinya. Saat ini, pemerintah telah mulai banyak memberikan dukungan dalam ranah penelitian melalui program-programnya [6]. Akan tetapi, dukungan kebijakan pun masih sangat diperlukan untuk mendorong geliat penelitian di bidang alat-alat kesehatan.
Sehubungan dengan itu, pada penelitian ini dikembangkan sebuah alkes berbentuk sarung tangan dengan soft-actuator berbasis sistem elektrik-pneumatik yang berfungsi khusus untuk membantu pasien untuk melakukan gerakan membuka tangan (hand). Perangkat ini diharapkan dapat membantu terapis untuk menangani pasien dengan jumlah yang lebih banyak dibandingkan tanpa adanya alat bantu. Aktuator pneumatik dipilih untuk mengurangi adanya kontak langsung antara tubuh pengguna dengan sistem kelistrikan yang ada, sehingga pengguna dapat merasa lebih aman dari sengatan listrik. Beberapa teknologi sejenis telah juga dikembangkan di luar negeri seperti pada [7]-[9] yang juga menggunakan aktuator pneumatik. Akan tetapi, sebagian besar jenis gerakan yang dihasilkan adalah gerakan menutup tangan. Oleh karena itu, pada penelitian ini, sarung tangan yang dibangun akan memberikan bantuan berupa gerakan membuka tangan (ekstensi tangan).
2 Perancangan Sistem Sarung Tangan
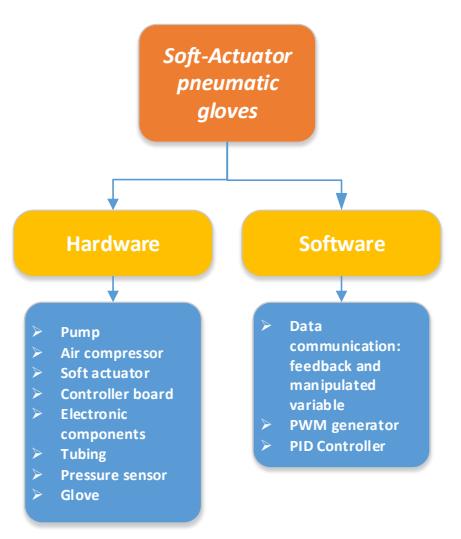
Sistem sarung tangan yang dibangun tentu akan terdiri dari hardware (perangkat keras) dan software (perangkat lunak) seperti yang ditunjukkan pada Gambar.1. Keduanya akan diintegrasi pada akhir penelitian untuk memastikan kinerja yang diharapkan. Soft-actuator merupakan salah satu komponen utama pada sistem ini. Pada dasarnya, soft-actuator ini akan berfungsi seperti otot buatan atau artificial muscle. Umumnya, teknologi otot buatan dikembangkan untuk diterapkan pada sistem exsoskeleton untuk dipakai oleh orang-orang yang cacat permanen (misalkan karena amputasi). Akan tetapi, pada sistem sarung tangan ini, soft-actuator akan berfungsi untuk memberikan bantuan gerakan pada pasien yang mengalami kesulitan dalam menggerakkan telapak tangan ketika mereka sedang ada dalam fase rehabilitasi. Soft-actuator pada sistem ini dilekatkan pada sarung tangan berbahan dasar kulit yang umum ada di pasaran. Bahan kulit dipilih dengan pertimbangan bahwa bahan tersebut memiliki elastisitas yang lebih rendah dibandingkan bahan kain. Rendahnya elastisitas ini diharapkan dapat mengurangi nilai tekanan minimum yang diperlukan oleh soft-actuator untuk mengeksekusi gerakan membuka tangan.
Perangkat lainnya pun memegang peranan yang cukup penting, seperti kompresor digunakan untuk menyuplai udara bertekanan ke dalam soft-actuator melalui saluran udara. Kompresor yang digunakan memiliki ukuran yang cukup kecil, mengingat bahwa
sistem tidak membutuhkan tekanan yang terlalu tinggi, yaitu hanya 40 psi. Selain itu, kompresor dilengkapi dengan sistem pengatur tekanan on-off untuk menjaga nilai tekanan udara di dalam tangki. Hal ini dilakukan dengan memanfaatkan limit-switch yang terintegrasi dengan sistem kompresor. Sistem sarung tangan yang dibangun pun dilengkapi dengan sensor tekanan yang berfungsi sebagai umpan balik untuk sistem kontrol yang akan diimplementasikan.
Gambar 1 Rancangan Sistem Pneumatic-based Soft-actuator Gloves
Perancangan perangkat keras dilakukan dengan melalui beberapa tahap, yaitu:
- 1. Penentuan material dan desain soft-actuator,
- 2. Pengujian soft-actuator,
- 3. Perancangan sistem elektronik, dan
- 4. Pengkabelan dengan papan pengontrol.
Perangkat lunak yang akan dibahas pada makalah ini lebih menitikberatkan pada identifikasi sistemnya, baik karakteristik statik maupun karakteristik dinamiknya, dan hasil akhir implementasi sistem kontrolnya. Identifikasi sistem dilakukan untuk menentukan daerah kerja sistem sarung tangan pneumatik ini.
2.1 Perancangan perangkat keras
Secara umum, sistem sarung tangan pneumatik ini dirancang dengan seperti pada Gambar. 2. Terdapat satu buah soft-actuator untuk masing-masing jari tangan dimana suplai udara untuk setiap soft-actuator pun diberikan melalui saluran udara yang berbeda. Akan tetapi, pada penelitian ini, seluruh saluran udara yang digunakan terhubung dengan sumber tekanan yang sama sehingga tekanan yang dihasilkan pada tiap soft-actuator adalah sama. Pada sistem ini hanya digunakan sebuah sensor saja karena aksi yang dilakukan akan memberikan pengaruh pada seluruh jari pada saat yang bersamaan.
Gambar 2 Desain Awal Sarung Tangan Rehabilitasi Pada Perangkat Lunak Rhino
2.2 Komponen-Komponen Sistem
Seperti yang telah dijelaskan sebelumnya, pada sistem ini digunakan beberapa komponen elektrik-pneumatik, yaitu
- Air Supply Unit (ASU) dengan tangki yang dapat menampung udara bertekanan sampai dengan 60 psi,
- solenoid valve (katup solenoid) 3/2 Normally Closed,
- sensor tekanan MPX-5700AP,
- papan pengontrol (controller board: Arduino Uno),
- saluran udara, dan
- soft-actuator.
Seluruh komponen ini akan dirangkai menjadi suatu sistem tanpa sistem kontrol terlebih dahulu untuk proses identifikasi sistem, seperti pada Gambar 3(a). Setelah identifikasi sistem selesai dilakukan, akan diterapkan sistem kontrol sesuai dengan diagram pada Gambar. 3(b). Sistem kontrol yang dipilih adalah sistem kontrol PID, karena sebuah sistem pneumatik umumnya memiliki respon natural orde-1 dengan konstanta waktu () yang cukup besar. Respon natural ini akan dibuktikan melalui percobaan yang dilakukan pada tahap identifikasi sistem (pembahasan pada subbab 3).
Sistem kontrol PID akan terintegrasi di dalam papan pengontrol Arduino Uno. Sistem kontrol ini digunakan untuk mengatur sinyal PWM (Pulse Width Modulation) yang dihasilkan oleh papan pengontrol. PID untuk PWM digunakan karena adanya keterbatasan sistem, yaitu pada komponen katup solenoid. Katup solenoid pada dasarnya hanya bersifat nyala/mati, sehingga untuk menghasilkan keluaran yang menyerupai keluaran analog, strategi kontrol PID pun dimodifikasi dengan memanipulasi sinyal PWM yang dihasilkan oleh papan pengontrol Arduino.
Gambar 3 Diagram blok desain sarung tangan dengan soft-actuator
Pada Gambar. 3, dapat dilihat bahwa aliran informasi dalam sistem terbagi menjadi dua bagian besar, yaitu informasi dalam bentuk sinyal elektrik, (garis dan blok warna biru) dan informasi dalam sinyak pneumatik (garis dan blok wakrna jingga). Tekanan yang dihasilkan pada soft-actuator dideteksi dengan menggunakan sensor tekanan udara MPX-5700AP. Sensor ini menghasilkan keluaran berupa sinyal listrik 0-5 Volt.
2.3 Soft-actuator (soft actuator)
Soft-actuator adalah salah satu komponen paling penting dalam penelitian ini. Material yang digunakan untuk fabrikasi soft-actuator ini harus memiliki kriteria-kriteria spesifik, yaitu mampu menghasilkan gerakan ekstensi ketika diberi udara bertekanan, lunak, ringan, kuat, dan mampu mengangkat beban tertentu. Kali ini, beban yang harus diangkat oleh soft-actuator ini adalah 1,1 kg yang merepresentasikan beban pada tangan seseorang. Berikut ini adalah tahapan-tahapan pengujian dari beberapa kandidat bahan dan desain soft-actuator:
- 1) Soft-actuator diberi tekanan 40 psi untuk melihat ketahanannya terhadap kebocoran, jika tidak terjadi kebocoran,
- 2) Soft-actuator diberi beban sebesar 1,1 kg untuk melihat kemampuannya menahan beban, jika soft-actuator mampu menahan beban tersebut,
- 3) Soft-actuator tersebut digunakan dalam sistem untuk pengujian dalam sistem.
3 Identifikasi Sistem
Set point yang diinginkan dimasukkan dalam perangkat lunak dengan menggunakan nilai tekanannya. Nilai tekanan pada set point ini didapatkan melalui identifikasi karakteristik
statik antara tekanan sebenarnya dengan tegangan yang dihasilkan oleh sensor. Sebelum sistem dengan umpan balik diujikan, sistem harus dievaluasi terlebih dahulu pada kondisi tanpa umpan balik. Pengujian ini dilakukan untuk menentukan daerah kerja linier dari sistem yang telah dirancang, sesuai dengan jenis-jenis komponen yang telah ditentukan. Berdasarkan eksperimen yang telah dilakukan, sistem akan bekerja linier sesuai dengan spesifikasi yang diberikan oleh sensor tekanan yang digunakan. Linieritas dari sistem ini dapat dilihat pada Gambar. 4, dan persamaan yang digunakan adalah sesuai dengan persamaan Vout yang tertera pada gambar tersebut.

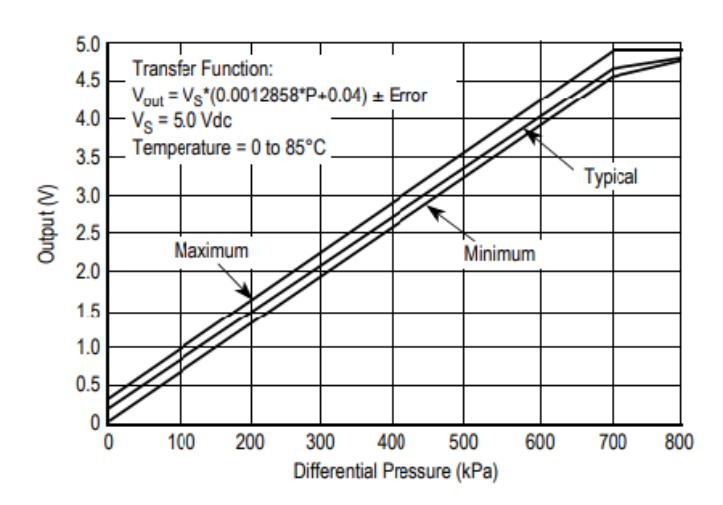
Gambar 4 Grafik Hubungan Antara Tekanan Dan Tegangan Pada Sensor MPX-5700AP
Berdasarkan hasil percobaan, maka dapat dikatakan bahwa karena daerah kerja sistem adalah pada rentang 0 – 275 KPa (atau 0 – 40 psi), sistem akan bekerja dalam rentang liniernya. Setelah rentang kerja linier didapatkan, sistem dengan umpan balik diuji, dengan menggunakan sistem PID sebagai pengontrolnya.
Setelah sistem tanpa umpan balik diuji linieritasnya, identifikasi sistem dilakukan untuk melihat respon natural sistem tanpa adanya sistem kontrol [10]. Selain itu, identifikasi sistem ini pun nantinya dapat menjadi pertimbangan terhadap jenis sistem kontrol yang akan digunakan. Pada dasarnya, identifikasi sistem adalah sebuah metode untuk melakukan pemodelan matematika untuk suatu sistem pengukuran dengan menggunakan komponen masukan dan keluaran pada sistem tersebut. Terdapat beberapa tahap yang dapat diikuti untuk dapat melakukan identifikasi sistem dinamik [10], yaitu
- 1) Mengukur sinyal masukan dan keluaran dari sistem,
- 2) Memilih struktur model yang akan digunakan,
- 3) Memilih dan mengaplikasikan metode estimasi untuk menentukan parameter dari struktur model yang telah ditentukan, dan
- 4) Mengevaluasi hasil model yang didapatkan.
Berdasarkan strukturnya, terdapat beberapa jenis struktur model matematik yang dapat digunakan dalam sebuah metode identifikasi sistem, yaitu pemodelan white-box, grey-box, dan black-box. Pada penelitian kali ini, pemodelan black-box dipilih karena metode ini dapat
memberikan aproksimasi model matematika dengan cara yang paling sederhana, yaitu hanya dengan mencari hubungan masukan – keluaran tanpa melihat konteks fisik yang ada dalam sistem.
Identifikasi dilakukan pada beberapa nilai tekanan, yaitu 15 psi, 20 psi, dan 25 psi. Nilainilai ini dipilih berdasarkan pengujian yang dilakukan sebelumnya. Nilai tekanan 15 psi adalah nilai tekanan dimana tangan pertama kali mampu dibuka (gerakan ekstensi) oleh soft-actuator, sedangkan nilai tekanan 25 psi dianggap sebagai nilai tekanan yang dapat membuat soft-actuator membantu pasien dengan beban tangan yang lebih besar untuk dapat melakukan gerakan ekstensi. Berdasarkan identifikasi yang telah dilakukan, didapatkan model-model matematika untuk nilai tekanan 15 psi, 20 psi, dan 25 psi secara berurutan adalah sebagai berikut:
\[G_1(s) = \frac{0.78}{0.2s+1} \tag{2}\]
\[G_2(s) = \frac{0.94}{0.49s+1} \tag{3}\]
\[G_3(s) = \frac{0.85}{0.47s + 1} \tag{4}\]
Identifikasi sistem yang telah dilakukan adalah berdasarkan data masukan dan keluaran dari nilai tekanan. Gambar. 5 menunjukkan grafik respon sistem pada set point 15 psi. Dari gambar tersebut dapat terlihat bahwa pada respon sistem openloop terdapat offset yang cukup besar. Sistem tidak pernah mencapai nilai tekanan yang diinginkan, dan kondisi tunaknya hanya mencapai sekitar 78% dari nilai set point yang diinginkan. Hal ini pun terjadi pada nilai set point lainnya. Berdasarkan hasil identifikasi tersebut, diketahui bahwa sistem kontrol PID dapat diimplementasikan lebih lanjut agar sistem dapat menanggulangi offset yang ada.
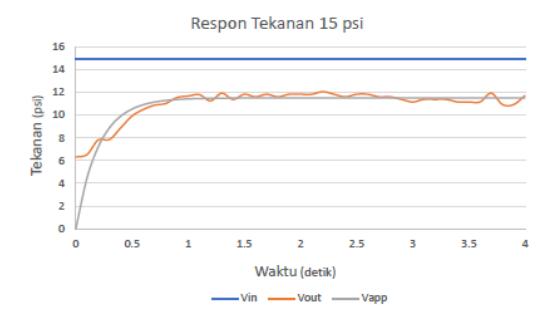
Gambar 5 Grafik Respon Sistem dengan Tekanan Masukan 15 psi
4 Implementasi rancangan sistem sarung tangan pneumatik dengan soft-actuator
Setelah tahap perancangan dan identifikasi sistem dilakukan, implementasi sistem secara keseluruhan mulai diekskusi. Sistem dirangkai sehingga sesuai dengan Gambar. 3(b) dan hasil implementasi sistem ditunjukkan pada Gambar 6. Sistem ini pada dasarnya masih belum bersifat wearable karena ukuran dari sistem elektrik-pneumatik-nya masih sangat
besar dan bebannya pun cukup berat. Akan tetapi, performa dari sistem ini sudah memenuhi kebutuhan gerakan untuk terapi rehabilitasi tangan.
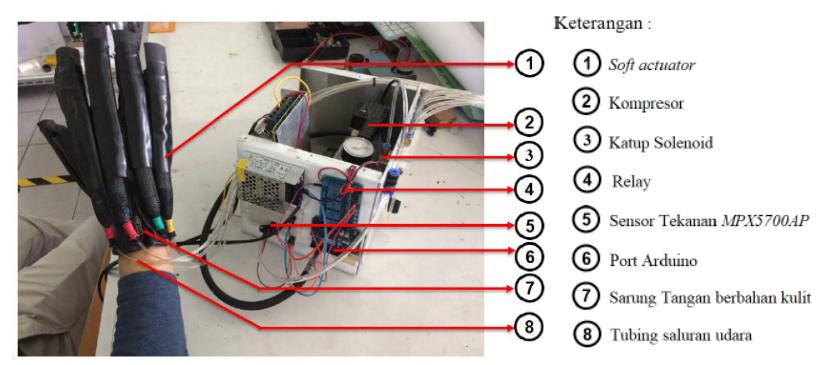
Gambar 6 Hasil Instalasi Komponen Sistem
Dengan adanya penggunaan sistem kontrol PID pada sistem ini, offset dapat dieliminasi secara total. Selain itu, penerapan sistem kontrol PID ini menyebabkan adanya tekanan jatuh yang cukup tinggi sehingga memunculkan respon tekanan yang bersifat repetitif pada saat sistem dijalankan. Kinerja sistem setelah penerapan sistem kontrol PID dapat dilihat pada Gambar 7.
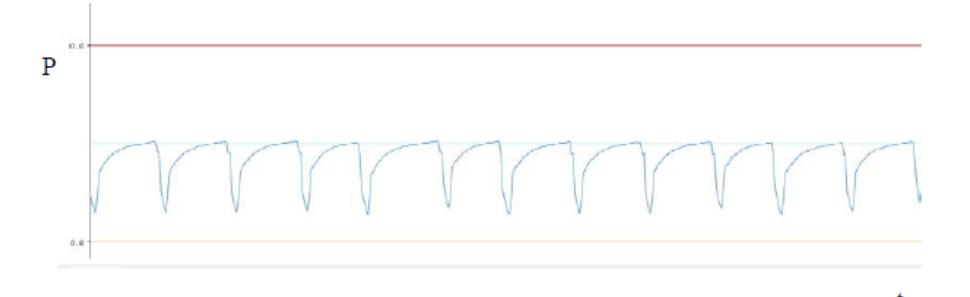
Gambar 7 Grafik Respon Implementasi Kendali PID Pada Arduino Untuk Tekanan 15 psi
5 Kesimpulan
Dari pelaksanaan penelitian mengenai perancangan sarung tangan rehabilitasi menggunakan soft-actuator berbasis pneumatik ini, dapat diambil kesimpulan sebagai berikut.
- 1) Sistem sarung tangan rehabilitasi terdiri dari komponen utama berupa sarung tangan dengan soft-actuator dan komponen pendukung berupa kompresor sebagai suplai udara, katup solenoid sebagai aktuator, sensor tekanan MPX5700AP sebagai umpan balik, relay sebagai driver serta Arduino sebagai sistem kontrol utama sistem.
- 2) Sistem pengontrol yang digunakan pada penelitian ini adalah berbasiskan PID (Proporsional, Integral, Derivatif)
3) Berdasarkan serangkaian pengujian berbagai macam material diperoleh material selang silikon untuk digunakan sebagai soft-actuator yang mampu bergerak fleksiekstensi.
6 Referensi
- [1] Zidni, Fauzan, Paradoks Inovasi Teknologi Alat Kesehatan, https://www.republika.co.id/berita/koran/opini-koran/16/03/14/o40m0h5-paradoksinovasi-teknologi-alat-kesehatan, 2016, diakses tanggal 15 Agustus 2018
- [2] Direktorat Jendral Kefarmasian dan Alat Kesehatan, Aplikasi Info Alat Kesehatan & PKRT, http://infoalkes.depkes.go.id/, diakses tanggal 14 Agustus 2018
- [3] Kementerian Kesehatan RI, Data dan Informasi: Profil Kesehatan Indonesia 2017, 2018.
- [4] Pin-Barre, Caroline, Laurin, Jerome, Physical Exercise as a Diagnostic, Rehabilitation, and Preventive Tool: Influence on Neuroplasticity and Motor Recovery after Stroke, Neural Plasticity, vol. 2015, article ID 608581, 2015.
- [5] Hariandja, J.R.O., Identifikasi Kebutuhan Akan Sistem Rehabilitasi Berbasis Teknologi Terjangkau Untuk Penderita Stroke di Indonesia. Laporan Riset – Engineering Science LPPM UNPAR. 2013
- [6] Antara, Agregasi, Mantap! LPDP Telah salurkan 16.887 Beasiswa. https://news.okezone.com/read/2017/09/14/337/1776208/mantap-lpdp-telahsalurkan-16-887-beasiswa, (28 Agustus 2018)
- [7] Polygerinos, P., Lyne, S., et.al., Towards a Soft Pneumatic Glove for Hand Rehabilitation. Proceeding of 2013 IEEE/RSJ International Conference on Intelligent Robot and Systems (IROS), pp. 1512-1517, 2013.
- [8] Yap, H. K., Lim, J. H., Goh, J. C. H., Yeow, C. H., Design of a Soft Design of a Soft Robotic Glove for Hand Rehabilitation of Stroke Patients With Clenched Fist Deformity Using Inflatable Plastic Actuators. Journal of Medical Devices, vol. 10, 2016.
- [9] Miriyev, A., Stack, K., Lipson, H., Soft Material for Soft Actuators, Nature Communication, vol. 8, article number. 596, 2017.
- [10]Mathworks, System Identification Overview, Mathworks, https://www.mathworks.com/help/ident/gs/about-system-identification.html, (28 Agustus 2018)
7 Acknowledgement
Penelitian ini didukung penuh oleh hibah Riset ITB tahun 2018. Ucapan terima kasih yang sebesar-besarnya pun kami berikan pada seluruh pihak yang telah membantu kami dalam proses penyelesaian penelitian ini, khususnya untuk Dr. Suprijanto dan seluruh anggota Laboratorium Instrumentasi Medik di Program Studi Teknik Fisika ITB.