
1 Pendahuluan
Populasi manusia di seluruh dunia mengalami peningkatan yang pesat, terutama di kotakota besar. Peningkatan kepadatan penduduk memiliki pengaruh signifikan terhadap kemampuan transportasi dalam melayani kebutuhan publik [1]. Salah satu moda transportasi publik yang paling banyak digunakan adalah kereta api. Namun kapasitas kereta api terkadang tidak cukup untuk menampung padatnya penumpang. Oleh karena itu diperlukan peningkatan frekuensi dan kapabilitas layanan kereta api [2].
Solusi untuk mengatasi masalah tersebut adalah dengan mengganti sistem persinyalan blok tetap yang ada dengan sistem persinyalan blok bergerak. Communication-Based Train Control (CBTC) adalah sistem persinyalan blok bergerak yang menggunakan komunikasi radio frekuensi dua arah antara kereta api dengan perangkat kontrol yang terdistribusi di sepanjang jalur untuk saling bertukar informasi mengenai posisi serta Limit of Movement Authority (LMA) masing-masing kereta api [3]. Secara teoretik, sistem CBTC dapat menambah jumlah kereta yang beroperasi sehingga frekuensi kedatangan kereta dapat dipercepat agar tidak terjadi penumpukan penumpang di stasiun.
Untuk menjamin reliabilitas dan keamanan sistem CBTC, diperlukan sensor yang akurat dan presisi. Pada umumnya sensor yang digunakan pada kereta api adalah sensor posisi dan kecepatan. Kedua sensor tersebut akan menghasilkan pengukuran yang lebih akurat dan presisi apabila digunakan secara bersamaan. Metode ini dinamakan sensor fusion[4] dan pertama kali dikenalkan oleh Schmid dan Mirabadi [5].
Untuk menambah jumlah kereta yang beroperasi, digunakan algoritma kontrol sinkronisasi yang dikembangkan oleh Takagi [6]. Kontrol sinkronisasi dapat meminimalkan jarak aman antar kereta api, sehingga waktu antar kedatangan kereta api lebih cepat jika dibandingkan dengan sistem persinyalan blok tetap [7].
Pada penelitian ini digunakan miniatur kereta api sebagai model kereta api sebenarnya. Bagian 2 akan menjelaskan mengenai penentuan posisi kereta api yang dilakukan dengan algoritma sensor fusion dan juga cara untuk menjaga jarak aman kereta menggunakan algoritma kontrol sinkronisasi. Bagian 3 akan menjelaskan permodelan sistem beserta skema sensor fusion dan kontrol sinkronisasi. Pada bagian 4 akan ditampilkan hasil dari eksperimen skala laboratorium beserta analisisnya. Bagian 5 berisi kesimpulan.
2 Dasar Teori
2.1 Communication Based Train Control
Communication-Based Train Control (CBTC) adalah sebuah perkembangan terkini dari sistem persinyalan kereta api. Di era digital, seluruh perangkat dapat terhubung lewat jaringan komunikasi data, termasuk sistem persinyalan kereta api. CBTC memiliki karakteristik mampu menentukan posisi kereta dengan akurat dan presisi, serta mampu melakukan komunikasi data dua arah secara kontinu dengan kapasitas data besar antara kereta api dengan perangkat yang terdistribusi di sepanjang rel untuk memastikan kereta tetap berada pada jarak amannya dengan kereta lain [8], diilustrasikan pada Gambar1.
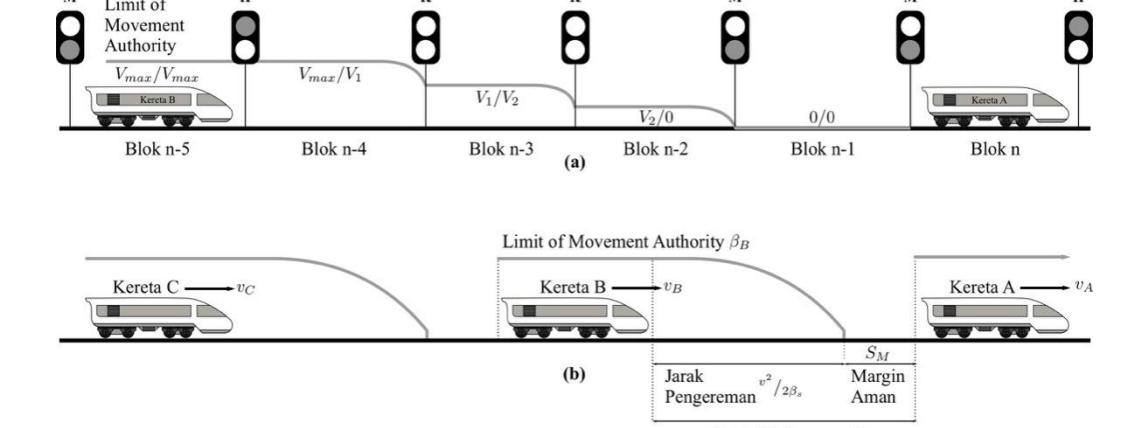
Gambar1 Limit of Movement Authoritypada(a) SistemPersinyalan Blok Tetapdan (b) Blok Bergerak
2.2 Sensor Fusion
Sensor fusion adalah proses menggabungkan data-data dari sensor untuk mendapatkan data yang lebih dapat dipercaya walaupun data dari masing-masing sensor yang digunakan kurang dapat dipercaya atau memliki ketidakpastian tertentu. Data yang diproses dengan sensor fusion akan memiliki ketidakpastian yang lebih kecil atau dalam kata lain estimasi akan lebih akurat. Salah satu metoda yang digunakan untuk sensor fusion adalah Kalman Filter yang dapat memprediksi dan mengkoreksi pengukuran sensor [9].
2.3 Unscented Kalman Filter
Unscented Kalman Filter (UKF) adalah sebuah algoritma estimator Bayesian yang merupakan pengembangan dari algoritma Kalman Filter untuk sistem nonlinear. Berbeda dengan Extended Kalman Filter (EKF) yang menggunakan matriks Jacobian untuk mengaproksimasi fungsi nonlinear, UKF menggunakan prinsip transformasi titik sigma untuk mendekati fungsi nonlinear [10].
Algoritma UKF memiliki struktur rekursif yang terdiri dari tahap prediksi dan koreksi. Tahap prediksi variabel keadaan dimulai dengan menentukan titik sigma \(\mathcal{X}\) untuk menangkap karakteristik dari distribusi probabilitas sistem dan bobot masing masing titik tesebut \(W_i\).
\[\mathcal{X}_0 = \hat{x}(k-1|k-1) \#(1) \tag{1}\]
\[X_i = \hat{x}(k-1|k-1) + \sqrt{(N_x+j)P(k-1|k-1)}\](2)
\[X_{i+N} = \hat{x}(k-1|k-1) - \sqrt{(N_x+j)P(k-1|k-1)}\](3)
\[W_0 = \frac{j}{(N_v + i)} \tag{4}\]
\[W_i = \frac{j}{2(N_r + j)} \tag{5}\]
\[W_{i+N} = \frac{j}{2(N_x + j)} \tag{6}\]
dimana \(\hat{x}(k-1|k-1)\)adalah nilai rata-rata awal, P(k-1|k-1) adalah kovarian kesalahan awal, \(N_x\) adalah dimensi dari variabel keadaan, dan j adalah parameter skala algoritma UKF. Titik sigma tersebut ditransformasikan menggunakan fungsi nonlinear f.
\[X_i(k|k-1) = f(X_i(k-1|k-1), u(k-1), w)(7)\]
dimanaX,u, dan Y merupakan variable keadaan, masukan, dan luaran system pada iterasi k. Variabel w and q menujukkan gangguan proses dan gangguan pengukuran. Nilai hasil transformasi tersebut digunakan untuk memprediksi nilai rata-rata dari variable keadaan \(\hat{x}(k|k-1)\) menggunakan metode Weighted Statistical Linear Regression (WSLR) dan juga digunakan perhitungan prediksi kesalahan \(e_{\hat{x_i}}\) serta kovarian prediksi P(k|k-1) dengan \(R_w\) merupakan matriks gangguan proses.
\[\hat{x}(k|k-1) = \sum_{i=1}^{2N_x} W_i \mathcal{X}_i(k|k-1)\] (8)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 10 (2), 2018 ISSN: 2085-2517, e-ISSN: 2460-6340
\[e_{\hat{x}_i} = \mathcal{X}_i(k|k-1) - \hat{x}(k|k-1)\] (9)
\[(k|k-1) = \sum_{i=1}^{2N_x} W_i [e_{\hat{x}_i}] [e_{\hat{x}_i}]' + R_w\] (10)
Tahap kedua adalah prediksi variable pengukuran dengan menentukan titik sigma \(\mathcal Y\) dengan bobot yang sama dengan tahap sebelumnya. Kemudian titik sigma tersebut ditransformasikan melalui fungsi nonlinear pengukuran h. Hasil dari transformasi digunakan untuk memprediksi nilai rata-rata variabel pengukuran \(\hat{y}(k|k-1)\) dan juga perhitungan kesalahan residual \(\epsilon_i(k|k-1)\) dan kovarian residual \(R_\epsilon(k|k-1)\) dengan \(R_q\) adalah matriks gangguan pengukuran.
\[\mathcal{Y}_0(k-1|k-1) = \mathcal{X}_i(k|k-1) \tag{11}\]
\[\mathcal{Y}_i(k-1|k-1) = \mathcal{X}_i(k|k-1) + j\sqrt{R_w(k|k-1)}\](12)
\[\mathcal{Y}_{i+N}(k-1|k-1) = \mathcal{X}_i(k|k-1) - j\sqrt{R_w(k|k-1)}\](13)
\[\mathcal{Y}_i(k|k-1) = h(\mathcal{Y}_i(k-1|k-1), q)\] (14)
\[\hat{y}(k|k-1) = \sum_{i=1}^{2N_x} W_i \mathcal{Y}_i(k|k-1)\] (15)
\[\epsilon_i(k|k-1) = \mathcal{Y}_{i,i}(k|k-1) - \hat{y}(k|k-1)\] (16)
\[R_{\epsilon}(k|k-1) = \sum_{i=1}^{2N_x} W_i \left[ \epsilon_i(k|k-1) \right] \left[ \epsilon_i(k|k-1) \right]' + R_q (17)\]
Tahap ketiga adalah penentuan \(kalman\ gain\ K\) yang diperoleh dari hasil kovarian silang \(R_{x\varepsilon}\).
\[R_{x\epsilon}(k|k-1) = \sum_{i=1}^{2N_x} W_i \left[ e_{\hat{x}_i}(k|k-1) \right] [\epsilon_i(k|k-1)]' + R_q(18)\]
\[K(k) = R_{x\varepsilon}(k|k-1)R_{\varepsilon}^{-1}(k|k-1)\] (19)
Tahap keempat adalah koreksi yang menghasilkan nilai estimasi dari variable keadaan \(\hat{x}(k|k)\) dan nilai estimasi kovarian P(k|k). Kedua variabel tersebut akan digunakan pada iterasi selanjutnya sebagai nilai awal.
\[\hat{x}(k|k) = \hat{x}(k|k-1) + K(k)o(k)\] (20)
\[P(k|k) = P(k|k-1) - K(k)R_{\varepsilon}(k|k-1)K'(k)(21)\]
dimanao(k) adalah inovasi yang merupakan selisih pengukuran aktual dari sensor z(k) dengan prediksi pengukuran \(\hat{y}(k|k-1)\).
\[o(k) = z(k) - \hat{y}(k|k-1)\] (22)
2.4 Kontrol Sinkronisasi
Kontrol sinkronisasi adalah suatu teori kontrol yang dikembangkan oleh Takagi untuk mensinkronkan pergerakan antar kereta pada system persinyalan blok bergerak. Tujuannya adalah untuk menjaga agar kereta depan (A) dan kereta belakangnya (B) selalu berada pada jarak minimum dalam berbagai kondisi. Dalam penelitian ini digunakan variasi system blok bergerak murni [11] dengan asumsi "tembok bata", dimana kereta A dapat berhenti secara tiba-tiba, sehingga kereta B harus mengerem dari jarak minimum. Jarak minimum antar kereta didefinisikan sebagai penjumlahan margin aman dan jarak pengereman kereta api.
\[S_{\min(t)} = x_{AT} - x_{BN} = S_M + \frac{v_B^2(t)}{2\beta_S}\] (23)
dimana adalah selisih antara posisi ekor kereta A dengan kepala kereta B. dan adalah kecepatan kereta B dan perlambatan maksimumnya. Apabila kedua kereta sudah berada pada jarak minimumnya, maka kontrol sinkronisasi akan aktif dan menyesuaikan kecepatan kereta B terhadap kereta A dengan cara mengatur perlambatan kereta B .
\[\beta_B = \beta_S \frac{(v_B - v_A)}{v_B}, dimana \ v_B \neq 0\] (24)
Namun apabila kereta B berhenti ( ) dan berada pada jarak minimum dengan kereta A, misalkan di sebuah stasiun, maka kontrol sinkronisasi tidak dapat digunakan. Oleh karena itu Takagi mengembangkan suatu algoritma control tambahan dimana pada saat kedua kereta mulai bergerak, kereta B akan bergerak lebih lambat daripada kereta A namun jarak minimumnya tetap dipertahankan. Algoritma tersebut disebut control keberangkatan, dimana bernilai 0 hingga 1, dan adalah percepatan kereta A dan B.
\[\alpha_A = k_{percepatan} \beta_s \tag{25}\]
\[\alpha_B = \beta_S \frac{(-1 + \sqrt{1 + 4k_{percepatan}})}{2} \tag{26}\]
3 PerancanganSistem
3.1 KonfigurasiSistem
Sistem CBTC dimodelkan dengan miniature kereta api LEGO yang dilengkapi dengan berbagai sensor dan aktuator, diilustrasikan pada Gambar 2. Sensor yang digunakan berupa sensor posisi Indoor Positioning System (IPS) yang berfungsi menggantikan GPS, sensor Radio Frequency Identification(RFID) yang berfungsi menggantikan balise, dan sensor tachometer untuk mengukur kecepatan. Sementara aktuator yang digunakan adalah motor DC. Pengontrol yang digunakan adalah Node MCU yang menggantikan onboard unit. Zone controller digantikan oleh komputer yang menjalankan program MATLAB. Protokol komunikasi tetap menggunakan Wi-Fi 802.11 dengan bantuan Message Queuing Telemetry Transport (MQTT).
Data pengukuran dari setiap sensor yang berupa posisi dan kecepatan kereta api akan dikirimkan oleh pengontrol Node MCU kepada computer melalui protocol komunikasi MQTT. Kemudian MATLAB akan mengolah data tersebut dengan program sensor fusion dan control sinkronisasi. Hasilnya berupa perintah kecepatan yang akan dikirimkan balik ke Node MCU melalui MQTT untuk menggerakan Motor DC sehingga kereta api dapat berjalan sesuai dengan kecepatan yang diinginkan.
Gambar 2 Konfigurasi perangkat keras dan lunak pada sistem
3.2 Skema Sensor Fusion
Skema sensor fusion dilakukan menggunakan tiga sensor yaitu IPS, RFID, dan enkoder. Sensor encoder yang digunakan untuk mengukur kecepatan kereta memiliki sampling time yang tinggi namun akurasi yang rendah. Sensor IPS, sebagai pengganti Global Positioning System (GPS) memiliki akurasi dan sampling time sedang. Sedangkan sensor RFID sebagai pengganti balise memiliki akurasi paling tinggi namun sampling time yang rendah. Pada lintasan uji hanya terdapat 12 titik tag RFID.
Data dari ketiganya kemudian diakuisisi oleh mikrokontroler node MCU yang akan mengirimkan data pembacaan masing-masing sensor secara nirkabel melalui protokol MQTT (Message Queuing Telemetry Transport) ke perangkat lunak Matlab untuk diolah lebih lanjut menggunakan algoritma Unscented Kalman Filter (UKF).
3.3 Skema Kontrol Sinkronisasi
Algoritma kontrol sinkronisasi disimulasikan menggunakan dua kereta LEGO yang bergerak pada lintasan persegi. Pada lintasan tersebut dipasang tiga stasiun yaitu stasiun A, stasiun B, dan stasiun utama. Kereta yang bergerak di depan disebut kereta A dan yang mengikutinya disebut kereta B. Kereta A diharuskan berhenti selama 1-3 detik di stasiun A dan stasiun utama. Kereta B juga diharuskan berhenti selama 1-3 detik di stasiun B dan stasiun utama. Kedua kereta harus menjaga jarak minimumnya selama jalannya simulasi agar tidak terjadi tabrakan.
Saat simulasi berlangsung, kereta akan menjalankan program control sinkronisasi apabila jarak minimum antar dua kereta terpenuhi. Apabila kedua kereta berhenti di stasiun utama, maka control keberangkatan akan dijalankan. Setiap kereta dapat mengetahui posisi dan kecepatannya dari hasil pengolahan sensor fusion dan menjalankan program control berdasarkan data tersebut.
4 Hasil dan Analisis
4.1 Hasil Penentuan Posisi Kereta Api Menggunakan Sensor Fusion
Pada penelitian ini dilakukan percobaan sebanyak tiga kali menggunakan dua miniature kereta api. Berikut merupakan hasil penentuan posisi dari sensor enkoder, sensor IPS dan algoritma UKF.
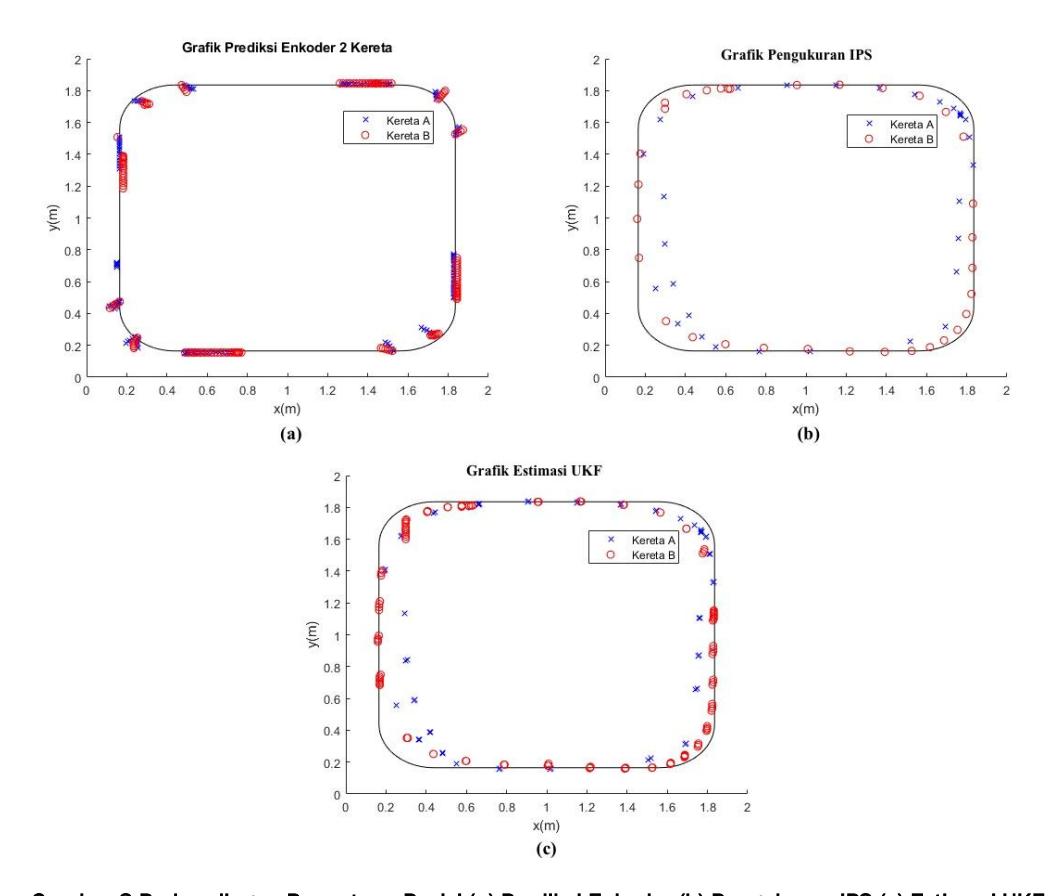
Gambar 3 Perbandingan Penentuan Posisi (a) Prediksi Enkoder (b) Pengukuran IPS (c) Estimasi UKF
Berdasarkan Gambar 3(a) dapat terlihat bahwa sensor encoder memiliki kesalahan yang besar dalam penentuan posisi kereta api, sementara baik sensor IPS maupun algoritma UKF memiliki akurasi yang lebih baik dibandingkan dengan hasil dari sensor encoder seperti terlihat pada Gambar 3(b) dan Gambar 3(c). Namun terlihat bahwa hasil penentuan posisi dengan algoritma UKF memiliki kerapatan data yang lebih tinggi dibandingkan dengan sensor IPS. Hal tersebut menunjukkan bahwa algoritma UKF telah dapat menggabungkan akurasi dari sensor IPS dan kerapatan data sensor enkoder.
Performa masing-masing metode penentuan posisi tersebut kemudian dievaluasi secara kuantitatif dengan cara menghitung nilai Root Mean Square Error (RMSE) dari tiap metode. Pada Error! Reference source not found. dapat terlihat bahwa nilai RMSE dari algoritma UKF lebih kecil dibandingkan RMSE dari masing-masing sensor. Hal tersebut menunjukkan
secara kuantitatif performa dari algoritma UKF telah dapat memperbaiki data dari tiap sensor. Hasil terbaik diperoleh dengan skema penggabungan data dari sensor enkoder, IPS, dan RFID.
Sumbu x Sumbu y Sumbu x Sumbu y Sumbu x Sumbu y Prediksi 34,21 23,75 34,87 31,46 34,5368 27,6047 IPS 28,99 18,87 25,39 31,25 27,1901 25,0603 UKF (Enkoder + IPS) 11,84 10,68 14,47 12,43 13,1559 11,5536 UKF (Enkoder + IPS + RFID) 0,57 0,43 0,76 0,71 0,66382 0,57015 Metode Kereta A RMSE (cm) RMSE (cm) Kereta B Rata-Rata RMSE (cm)
Tabel 1 Nilai Root Mean Square Metode Penentuan Posisi Kereta Api
4.2 Hasil Kontrol Sinkronisasi pada Sistem CBTC
Untuk menganalisa performa kontrol sinkronisasi, akan dilakukan perbandingan antara sistem persinyalan blok tetap dengan sistem CBTC yang dilengkapi oleh kontrol sinkronisasi. Perbandingan kedua sistem tersebut dianalisa kedalam dua faktor yaitu jarak antar kereta dan waktu yang ditempuh oleh kedua kereta dalam satu putaran.
Hasil percobaan ditunjukkan dalam bentuk grafik jarak terhadap waktu, dapat dilihat pada Gambar 4. Pada sistem persinyalan blok tetap, jarak antar kedua kereta adalah 1,89 m, sedangkan pada sistem CBTC, jarak antar kereta hanya 0,91 m. Perbedaan antar kedua sistem ini cukup signifikan, dimana sistem CBTC mampu mengurangi jarak antar kereta hingga dibandingkan dengan sistem persinyalan blok tetap. Dengan ini sistem CBTC terbukti dapat menambah jumlah kereta yang beroperasi pada lintasan.
Kemudian analisa kedua adalah dengan membandingkan waktu tempuh satu putaran untuk kedua sistem. Waktu yang dibutuhkan oleh sistem persinyalan blok tetap adalah 15,72 detik, sedangkan sistem CBTC hanya membutuhkan waktu 6,84 detik. Oleh karena itu, sistem CBTC lebih unggul karena dapat mengurangi waktu tempuh hingga dibandingkan dengan sistem persinyalan blok tetap. Dengan ini sistem CBTC terbukti dapat mencapai stasiun lebih cepat sehingga frekuensi datangnya kereta pun akan semakin sering.
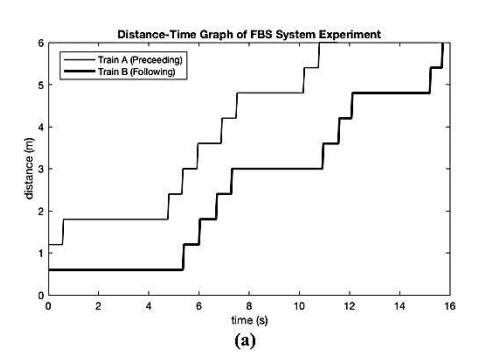
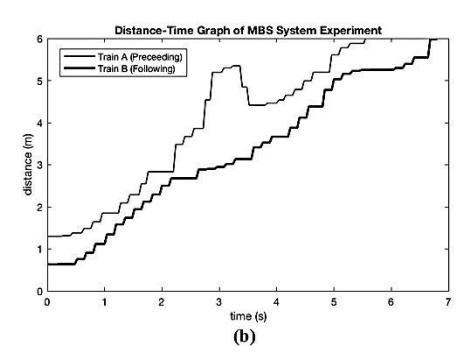
Gambar 4 Perbandingan Profil Jarak terhadap Waktu pada (a) Sistem Persinyalan Blok Tetap dan (b) Sistem Communication Based Train Control
5 Kesimpulan
Berdasarkan penelitian yang telah dilakukan diperoleh kesimpulan sebagai berikut.
- 1. Sistem CBTC telah dirancang dengan menggunakan algoritma Unscented Kalman Filter dan algoritma control sinkronisasi.
- 2. Skema sensor fusion berbasis algoritma UKF dengan menggabungkan data dari sensor enkoder, IPS, dan RFID memiliki nilai RMSE 0,66 cm dan 0,57cm pada sumbu x dan y.
- 3. Sistem CBTC dapat mengurangi jarak rata-rata antara dua kereta hingga 52% sehingga waktu tempuh kereta berkurang hingga 56% dibandingkan system persinyalan blok tetap.
6 Pustaka
- [1] S. Aminah, Transportasi Publik dan Aksesibilitas, Surabaya, 2006.
- [2] M. Brenna, F. Foiadelli, M. Longo, D. Zaninelli, P. Bellini, and M. Sicurello, Increasing of subway lines capability through moving block signaling systems: Modeling and simulation, in 2016 AEIT International Annual Conference (AEIT), 2016.
- [3] Robert D. Pascoe, Thomas N. Eichorn, What is communication-based train control?, IEEE Vehicular Technology Magazine, vol. 4, no. 4, pp. 16-21, 2009.
- [4] M. Larsson, Sensor Fusion Application to Railway Odometry, Stockholm.
- [5] Mirabadi, N. Mort, and F. Schmid, Application of Sensor Fusion to Railway Systems, in IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems, Washington, DC, 1996.
- [6] R. Takagi, Synchronisation control of trains on the railway track controlled by the moving block signalling system, IET Electrical Systems in Transportation, vol. 2, no. 3, pp. 130-138, September 2012.
- [7] H. Takeuchi, C. J. Goodman and S. Sone, Moving block signalling dynamics: performance measures and re-starting queued electric trains, IEE Proceedings - Electric Power Applications, vol. 150, no. 4, pp. 483-492, 8 July 2003.
- [8] IEEE Standard for Communications-Based Train Control (CBTC) Performance and
- Functional Requirements, IEEE std 1474.1-2004 (Revisions of IEEE Std 1474.1-1999), pp. 1-45, 2004.
- [9] R. E. Kalman, A New Approach to Linear Filtering and Prediction Problems, Transaction ASME J. Basic Eng., vol. 82, pp. 34-45, 1960.
- [10] S. J. Julier and J. K. Uhlmann, A New Extension of The Kalman Filter to Nonlinear System, in The 11th Symposium on Aerospace/Defense Sensing, Simulation, and Controls, 1997.
- [11] L. Pearson, Moving Block Signalling, England, 1973.