
1 Pendahuluan
Teori kontrol merupakan suatu bidang ilmu yang menawarkan berbagaimetoda inovasi untuk peningkatan performansi suatu sistem. Hingga saat ini, teori kontrol telah banyak digunakan dalam pendidikan dan penelitian di berbagai bidang natural maupun rekayasa [1][2]. Akademisi dan peneliti yang berminat mendalami teori kontrol perlu mendapatkan dukungan fasilitas yang dapat membantu proses pemahaman tentang konsep teoritis yang dipelajari. Dukungan tersebut dapat berupa alat peraga atau simulator sistem kontrol. Simulator tersebut diharapkan dapat meminimalisir kesenjangan antara teori yang dipelajari dengan aplikasi atau permasalahanpada kehidupan nyata [1]. Terdapat beberapa benchmark sistem yang sering digunakan dalam simulator untuk pembelajaran teori kontrol, salah satunya adalah sistem pendulum terbalik [3].
Sistem pendulum terbalik (SPT) adalah sistem nonlinear yang terdiri dari suatu tongkat pendulum yang hendak dijaga atau dikontrol agar berada pada posisi vertikal di atas suatu
gerobak yang bergerak. Pada sistem pendulum yang ditinjau pada makalah ini, titik tumpu pendulum diasumsikan terletak di atas gerobak yang bergerak pada arah horizontal. Gerobak dan pendulum tersebut dihubungkan oleh suatu sendi. Gerobak dilengkapi dengan sebuah motor yang menerima masukan tegangan listrik yang dapat menghasilkan torsi untuk menggerakkan gerobak pada arah horizontal. Dalam hal ini, posisi pendulum akan dikontrol menggunakan gerak horizontal gerobak [2]. Gambar 1 mengiIustrasikan SPT yang ditinjau pada makalah ini [4].
Dalam beberapa tahun terakhir, penelitian mengenai kontrol SPT telah banyak dilakukan, contohny akontrol SPT untuk aplikasi penyeimbangan robot berodadua menggunakan metode kontrol proporsional-integral serta rancang bangun sekuter yang dapat menyeimbangkan dirinya sendiri sebagai moda transportasi [5][6]. Beberapa penelitian terkait kontrol SPT dengan metode regulator kuadratik linier (linear quadratic regulator, LQR) serta penggunaan tapis Kalman untuk kompensasi kesalahan pengukuran sensor gyrojuga telah dilakukan sebelumnya [7].
Makalahini difokuskan pada implementasi sistem kontrol berbasis metode LQR dan tapis Kalman pada SPT. Pengontrol dirancang untuk mengontrol pendulum pada SPT agar dapat mempertahankan posisi tegak/vertikal secara stabil saat gerobak telah mencapai posisi yang diinginkan. Analisis dibatasi pada model linearisasi SPT berdasarkan asumsi sudut simpangankecil.
Makalah ini terdiri dari lima bab. Bab satu berisi penjelasan SPT dan teknik kontrolnya secara keseluruhan. Bab dua berisi penjelasan tentang SPT beserta pemodelannya. Bab tiga menjelaskan perancangan pengontrol SPT dengan menerapkan tapis Kalman dan LQR. Bab empat berisikan hasil simulasi dan observas isistem kontrol yang dirancang. Kesimpulan dipaparkan pada bab lima.
2 Deskripsi dan Model Sistem
SPT terdiri dari sebuah pendulum yang melekat pada gerobak yang dilengkapi dengan motor yang menggerakkan gerobak tersebut pada arah horizontal. Gerobak dilengkapi dengan encoder yang berfungsi untuk mengukur posisi gerobak dan sensor sudut yang berfungsi untuk mengukur sudut simpangan pendulum dari sumbu vertikal.
Gambar 1 menunjukkan skematika SPT yang ditinjau pada makalah ini. Pada SPT ini diasumsikan bahwa massa tongkat pendulum dapat diabaikan dan tidak ada gaya gesek pada engsel antara pendulum dengan gerobak. Gaya menggerakkan gerobak secara horizontal searah sumbu X. Sudut simpangan pendulum dari sumbu vertikal Ydisimbolkan dengan . Panjang tongkat pendulum dinyatakan sebagai . Massa pendulum dituliskan dengan , sedangkan massa gerobak dituliskan dengan . Perpindahan gerobak pada sumbu horizontal direpresentasikan dengan .
Gambar 1 Sketsa ketsa SPT yang ditinjau.
Untuk melakukan analisis dan perancangan pengontrol pada SPT, terlebih dahulu dilakukan pemodelan sistem. Pemodelan dilakukan dalam dua tahap, yaitu penentua persamaan gerak komponen pendulum dan komponen gerobak. Persamaan gerak pendulum dan gerobak pada SPT dapat diperoleh dari masing-masing komponen. DBB gerobak ditunjukkan pada Gambar 2 dan ditunjukkan Gambar 3. penentuan analisis diagram benda bebas (DBB) DBB pendulum
Berdasarkan DBB di Gambar 2, persamaan persamaandinamik pendulum dapatdituliskansebagai:
Gambar 2 diagram bendabebas (DBB) pendulum. pendulum.
Gambar 3 DBB gerobak.
dimana\(\tau\) adalah torsi, \(I_p\) adalah momen inersia pendulum, dan \(\alpha\) adalah percepatan sudut simpangan pendulum.Berdasarkan komponen gaya pada Gambar 2, makapersamaan (1) dapat dituliskan menjadi:
\[\sum F_{yp} \frac{L}{2} \sin(\theta) - \sum F_{xp} \frac{L}{2} \cos(\theta) = I_p \ddot{\theta}, \quad (2)\]
dimana \(F_{xp}\) dan \(F_{yp}\) berturut-turut merupakan gaya yang bekerja pada pendulum di sumbu X dan Y. \(F_{vp}\) dapat dituliskan sebagai berikut:
\[\sum F_{yp} = M_p \ddot{y}_p + M_p g, \tag{3}\]
dimana\(\ddot{y}_p\) menyatakan percepatan pendulum pada sumbu Y dan g adalah percepatan gravitasi. Komponen\(F_{xp}\)dapat didefinisikan sebagai berikut:
\[\sum F_{xy} = M_y \ddot{q}_y \tag{4}\]
dimana\(\ddot{q}_p\) merupakan percepatan pendulum pada sumbu X.
Percepatanpendulum pada sumbu Y dapat diperoleh dari turunan kedua \(y_v\)sebagai berikut:
\[y_p = \frac{L}{2}cos\theta. {(5a)}\]
\[\dot{y}_p = \frac{d}{dt} \left( \frac{L}{2} cos\theta \right) = -\frac{L}{2} \dot{\theta} sin\theta.\] (5b)
\[\dot{y}_{p} = -\frac{Ld(\dot{\theta}sin\theta)}{2dt} = -\frac{L}{2}\dot{\theta}cos\theta - \frac{L}{2}sin\theta\ddot{\theta}, = -\frac{L}{2}(\dot{\theta}cos\theta + sin\theta\ddot{\theta}). \tag{5c}\]
Di sisilain, percepatan pendulum terhadapsumbu X dapatdituliskansebagaiberikut:
\[q_p = \frac{1}{2}L\sin\theta + q. \tag{6a}\]
\[\dot{q}_p = \frac{dq}{dt} + \frac{\partial}{\partial t} \left( \frac{L}{2} sin\theta \right) = \dot{q} + \frac{L}{2} \dot{\theta} cos\theta.\] (6b)
\[\ddot{q}_p = \frac{d\dot{q}}{dt} + \frac{L\partial(\dot{\theta}\cos\theta)}{\partial t} = \frac{L}{2}\cos\theta\,\ddot{\theta} - \frac{L}{2}\sin\theta\,\dot{\theta} + \ddot{q}. \tag{6c}\]
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN: 2085-2517, e-ISSN: 2460-6340
Dengan mensubstitusikan(5c) ke persamaan (3),gaya pendulum di sumbu Y menjadi:
\[\sum F_{yp} = -M_p \frac{L}{2} (\dot{\theta} \cos\theta + \sin\theta \, \dot{\theta}) + M_p g = -\frac{1}{2} (\dot{\theta} \cos\theta + \ddot{\theta} \sin\theta) M_p L + M_p g. \tag{7}\]
Untuk mengetahui gaya pendulum pada sumbu X, persamaan (6c) perlu disubstitusikan ke persamaan (4) untuk memperoleh persamaan:
\[\sum F_{xp} = M_p \left( \frac{L}{2} \cos\theta \ddot{\theta} - \frac{L}{2} \sin\theta \dot{\theta} + \ddot{q} \right) = M_p \frac{L}{2} \cos\theta \ddot{\theta} - M_p \frac{L}{2} \sin\theta \dot{\theta} + M_p \ddot{q}. \tag{8}\]
Dengan mensubstitusikan persamaan (7)-(8) pada persamaan (2), maka diperoleh:
\[\begin{split} I_p \ddot{\theta} &= \left( M_p g - M_p \frac{L}{2} \dot{\theta} cos\theta - M_p \frac{L}{2} sin\theta \ddot{\theta} \right) \frac{L}{2} sin\theta - \left( M_p \frac{L}{2} cos\theta \ddot{\theta} - M_p \frac{L}{2} sin\theta \dot{\theta} + M_p \ddot{q} \right) \frac{L}{2} cos\theta, \\ &= \frac{L}{2} M_p g sin\theta - \frac{L^2}{4} M_p \dot{\theta} cos\theta sin\theta - \frac{L^2}{4} sin^2 \theta \ddot{\theta} - \frac{L^2}{4} M_p sin\theta cos\theta \dot{\theta} + \frac{L}{2} M_p cos\theta \ddot{q}, \\ &= \frac{L}{2} M_p g sin\theta - \frac{L^2}{4} M_p sin^2 \theta \ddot{\theta} - \frac{L^2}{4} M_p cos^2 \theta \ddot{\theta} + \frac{L}{2} M_p cos\theta \ddot{q}. \end{split}\]
Dengan menggunakan identitas trigonometri\(sin^2\theta + cos^2\theta = 1\), maka persamaan (9) menjadi:
\[I_p\ddot{\theta} = \frac{L}{2}M_pgsin\theta - \frac{L^2}{4}M_p\ddot{\theta} + \frac{L}{2}M_pcos\theta\ddot{q}.\] (10)
Berdasarkan DBB gerobak yang ditunjukkan pada Gambar 3, maka persamaan dinamik pada gerobak memenuhi persamaan:
\[\sum F_{rc} + \sum F_{vc} = M_c \ddot{q},\tag{11}\]
dimana\(F_{xc}\) adalah gaya pada gerobak terhadap sumbu X, \(F_{yc}\) merupakan gaya pada gerobak terhadap sumbu Y, dan \(\ddot{q}\) percepatan gerobak. Dengan meninjau komponengaya di Gambar 3, maka dapat diperoleh persamaan:
\[\sum F_{xc} = U - \sum F_{xp}\] \[= U - M_p \left( \frac{L}{2} \cos\theta \ddot{\theta} - \frac{L}{2} \sin\theta \dot{\theta} + \ddot{q} \right),\] \[= U - M_p \left( \frac{L}{2} \cos\theta \ddot{\theta} - \frac{L}{2} \sin\theta \dot{\theta} + \ddot{q} \right),\] (12)
\(= U - M_p \frac{L}{2} \cos\theta \, \ddot{\theta} + M_p \frac{L}{2} \sin\theta \, \dot{\theta} - M_p \ddot{q}.\)
Pada gerobak, nilai\(\sum F_{vc} = 0\) karena gerobak tidak bergerak pada arah vertikal (sumbu Y). Dalam hal ini, persamaan gerobak menjadi:
\[U - M_p \frac{L}{2} cos\theta \ddot{\theta} + M_p \frac{L}{2} sin\theta \dot{\theta} = (M_c + M_p) \ddot{q}. \tag{13}\]
Persamaan differensial untuk\(\ddot{\theta}\) dan \(\ddot{q}\) dapat diperoleh dengan mensubstitusi persamaan dinamil pendulum dan gerobak. Dalam hal ini \(\ddot{\theta}\)dapat didefinisikan sebagai berikut:
\[\left(I_p + \frac{L^2}{4}M_p\right)\ddot{\theta} = \frac{L}{2}M_pgsin\theta + \frac{L}{2}M_pcos\theta\ddot{q}.(14)\]
Definisikan\(I_p+\frac{L^2}{4}M_p=\gamma\) sehingga persamaan\(\ddot{\theta}\)dapat dituliskan sebagai berikut:
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN: 2085-2517, e-ISSN: 2460-6340
\[\ddot{\theta} = \frac{LM_p g sin\theta}{2\gamma} + \frac{LM_p cos\theta \ddot{q}}{\gamma}.\] (15)
Dengan mensubstitusikan(15) kepersamaan (13) dan mengasumsikan\(\theta\) bernilai kecil sehingga kondisi\(sin\theta=\theta\) dan \(cos\ \theta=1\)valid, maka(13) dapat dilinearisasi untuk memperoleh:
\[\begin{split} (M_c + M_p) \ddot{q} &= U - M_p \frac{L}{2} \left( \frac{L M_p g \theta}{2 \gamma} + \frac{L M_p \cos \theta \ddot{q}}{2 \gamma} \right) + M_p \frac{L}{2} \dot{\theta}, \\ &= U - \frac{M_p^2 L^2}{4} g \theta - M_p \frac{L^2}{4 \gamma} \ddot{q} + M_p \frac{L}{2} \dot{\theta}, \\ &\qquad \left( M_p + M_c + \frac{M_p L^2}{4 \gamma} \right) \ddot{q} = U - \frac{M_p^2 L^2 g \theta}{4 \gamma} + \frac{M_p L \dot{\theta}}{2}. \end{split}\](16)
Definisikan\(M_p + M_c + \frac{M_p L^2}{4\gamma} = Z\). Maka:
\[\ddot{q} = \frac{U}{Z} - \frac{M_p^2 L^2 g \theta}{4 \gamma Z} + \frac{M_p L \dot{\theta}}{2 Z}.\] (17)
Dengan mensubstitusikan (17) kepersamaan (15) dan mengasumsikan \(sin \theta = \theta, cos\theta = 1\), maka:
\[\begin{split} \ddot{\theta} &= \frac{L}{2\gamma} M_p g \theta + \frac{L}{2\gamma} M_p \left( \frac{U}{Z} - \frac{M_p^2 L^2 g \theta}{4\gamma Z} + \frac{M_p L \dot{\theta}}{2Z} \right), \\ &= \frac{L}{2\gamma} M_p g \theta + \frac{L M_p}{2\gamma Z} U - \frac{L^3 M_p^3 g}{8\gamma^2 Z} \theta + \frac{M_p^2 L^2}{4\gamma Z} \dot{\theta}. \end{split} \tag{18}\]
Persamaan (17) dan (18) merepresentasikan model dinamik SPT. Untuk implementasi metoda LQR, model (17)-(18) perlu direpresentasikan dalam bentuk persamaan ruang keadaan.Untuk memperoleh model persamaan ruang keadaan, tinjau pemisalan vektor variabel keadan berikut:
\[x_1 = \theta; \ \dot{x}_1 = \dot{\theta} = x_2.\]
\(x_2 = \dot{\theta}; \ \dot{x}_2 = \ddot{\theta}.\)
\(x_3 = q; \ \dot{x}_3 = \dot{q} = x_4.\)
\(x_4 = \dot{q}; \ \dot{x}_4 = \ddot{q}.\)
Definisikan \(x = [x_1, x_2, x_3, x_4]^T\) sebagai vektor variabel keadaan SPT. model persamaan ruang keadaan SPT dapatdituliskan sebagai berikut:
\[\begin{split} \dot{x} &= Ax + BU(t), \\ &= \begin{bmatrix} 0 & 1 & 0 & 0 \\ \frac{LM_p g}{2\gamma} - \frac{L^3 M_p^3 g}{8\gamma^2 Z} & \frac{M_p^2 L^2}{4\gamma Z} & 0 & 0 \\ 0 & 0 & 0 & 1 \\ -\frac{M_p^2 L^2 g}{4\gamma Z} & \frac{M_p L}{2Z} & 0 & 0 \end{bmatrix} x + \begin{bmatrix} 0 \\ \frac{LM_p}{2\gamma Z} \\ 0 \\ \frac{1}{Z} \end{bmatrix} U \end{aligned}\]
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN : 2085-2517, e-ISSN: 2460-6340
(19)
Sinyal keluaran SPT dimodelkan sebaga iberikut:
\[y = Cx\] \[= \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} x. \tag{20}\]
0 0 1 0
Dapat dilihat model SPT (19)-(20) merupaka nsistemlinear time-invariant (LTI).
3 Teknik Kontrol Pada Sistem
Bagian makalah ini berisi penjelasan mengenai teknik kontrol berbasis metoda LQR dan tapis Kalman yang digunakan pada SPT.
Pada penelitian ini, sinyal kontrol umpan balik pada SPT ditentukan dengan metoda LQR. Sinyal kontrol berbasis LQR merupakan sinyal kontrol optimal yang dapat menstabilkan sistem LTI berdasarkan minimisasi suatu indeks performansi kuadratik tertentu [4,8].
Model LTI untuk SPT pada persamaan (19)-(23) memiliki empat variabel keadaan, yaitu posisi gerak horizontal kereta , kecepatan gerak horizontal kereta, sudut simpangan tongkat pendulum, dan kecepatan sudut simpangan tongkat pendulum. Namun, variabel yang dapat diukur hanya ada dua, yaitu dan. Sehingga untuk implementasi metoda LQR, diperlukan suatu estimator bagi dua variabel keadaan yang tidak terukur lainnya. Makalah ini menggunakan tapis Kalman sebagai estimator karena tapis Kalman merupakan estimator optimal bagi sistem LTI[9].
3.1 Metode Linear Kuadratik Regulator
Metode LQR dapat digunakan untuk merancang pengontrol optimal padasuatu sistem LTI. Sinyal kontrol LQR ditentukan berdasarkan minimisasisuatu indeks performansi sistem tertentu[10]. Indeks performansi pada metoda LQRumumnya dikarakterisasi oleh dua matriks, yaitu matriks dan . Matriks adalah matriks positif definit utuk kompensasi aksi kontrol sedangkan matriks adalah matriks nonnegatif definit untuk kompensasi variabel keadaan sistem.
Tinjau model umum sistem LTI berikut:
\[\dot{x}(t) = Ax(t) + BU(t); \quad t \ge 0, x(0) = x_0, (21a)\]
\[y(t) = Cx(t), (21b)\]
Dimana A adalah matriks keadaan, ()adalah vektor variabel keadaan pada waktu t, adala hmatriks masukan, () adalah vector keluaran sistem, adalah matriks keluaran sistem, dan () adalah vektor sinyal masukan/kontrol. Pada makalah ini, sinyal kontrol sistem diasumsikan sebagai sinyal umpan balik berbentuk:
\[U(t) = Fx(t), (22)\]
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN: 2085-2517, e-ISSN: 2460-6340
Dengan Fadalah matriks penguat sinyalkontrol umpan balik.Pada metoda LQR, sinyal kontrolU(t) ditentukan sebagai nilai yang meminimumkan indeksperformansi kuadratik berikut:
\[J = \frac{1}{2} \int_0^\infty [x^T(t)Qx(t) + U^T(t)RU(t)dt.\] (23)
Dalam hal ini, sinyal kontrol optimal terkait memenuhi persamaan
\[U(t) = Fx(t) = -R^{-1}B^{T}Px(t), \tag{24}\]
dimana P merupakan matriks simetrik positif definite yang memenuhi persamaan aljabar Riccati (algebraic Riccati equation, ARE) sebagai berikut:
\[A^{T}P + PA + PBR^{-1}B^{T}P + Q = 0.\] (25)
Padaliteratur metoda LQR, diketahui bahwa sinyal kontrol optimal (24) selalu dapat ditentukan jika sistem LTI yang ditinjau memenuhi syarat dapat distabilkan (stabilizable) dan dapat dideteksi (detectable). Dengan demikian, algoritma dasar metoda LQR berikut untuk memperoleh sinyal kontrol optimal (24) dapat dituliskan [8,10]:
- (i). Ujiketerstabilan (stabilizability) dan keterdeteksian (detectability) sistem
- (ii). Jika (i) terpenuhi, tentuka nsolusimatriks simetrikP pada ARE di persamaan (25).
- (iii). Tentukan sinyal kontrol optimal sesuai (24).
3.2 Kalman Filter
Metode LQR standar sebagaimana dijelasan di bab 3.1 dapatdigunakan pada sistem dengan semua variabel keadaan terukur. Pada praktiknya, tidak semua variabel keadaan pada sistem dapat diukur secara langsung, sehingga diperlukan estimator yang dapat memprediksi variabel keadaan tidak terukur berdasarkan pengukuran yang tersedia. Estimator optimal yang dapat digunakan pada sistem LTI adalah tapis Kalman [9].
Untuk menjelaskan metoda tapis Kalman, makalah ini akan menggunakan versi diskrit model LTI sistem (21) sebagai berikut:
\[x_{k+1} = \phi x_k + w_k\]; \(k = 0, 1, 2 ...\) (26a)
\[z_k = Hx_k + v_k, \tag{26b}\]
Dimana k adalah indeks waktu diskrit, \(x_k\)dan \(z_k\)adalah vektor variabel keadaan dan pengukuran pada waktuk, \(\phi\)dan H adalah matriks keadaan dan keluaran, w dan v adalah gangguan pada proses dan pengukuran yang diasumsikan tidak berkkorelasi. Statistik gangguan proses dan pengukuran diasumsikan diketahui dalam bentuk nilai kovariansinya masing-masing sebagai berikut:
\[Q = E(w_k w_k^T) \operatorname{dan} R = E(v_k v_k^T), \tag{27}\]
dimana \(E(\cdot)\) merupakan operator nilai ekspektasi (expected value). Model (29)-(30) dapat diperoleh dari model (22)-(23) dengan metoda diskritisasi (atau secara komputasi misalnya menggunakan MATLAB dengan command C2D).
Jika\(\hat{x}_k\) adalah nilai estimasi variabel keadaan dan \(e_k = x_k - \hat{x}_k\)adalah kesalahan pada waktu k, matriks kovariansi kesalahandi waktu kadalah:
\[P_k = E[e_k e_k^T] = E[(x_k - \hat{x}_k)(x_k - \hat{x}_k)^T], (28)\]
Dengan menggabungkan nilai estimasi dengan hasil pengukuran, maka nilai estimasi dapat diperbarui berdasarkan persamaan berikut:
\[\hat{x}_k = \hat{x}_{k-1} + K_k (z_k - H\hat{x}_{k-1}),\] \[= \hat{x}_{k-1} + K_k (Hx_k + v_k - H\hat{x}_{k-1}),\] (29)
dimana\(K_k\)merupakan faktor penguatan Kalman (Kalman gain) dan\(i_k = (z_k - H\hat{x}_{k-1})\) sering disebut komponen inovasi. Dengan mensubstitusikan (29) pada (28), maka matriks kovariansi (28) menjadi:
\[P_k = (1 - K_k H) P_{k-1} (1 - K_k H)^T - 2(1 - K_k H) K_k^T E[(x_k - \hat{x}_{k-1}) v_k^T] + K_k R K_k^T, \tag{30}\]
Karena gangguanpengukuran dan proses tidak saling berkorelasi, makaE[xv]=0. Sehingga:
\[E[(x_k - \hat{x}_{k-1})v_k^T] = E[x_k v_k^T] - E[\hat{x}_{k-1} v_k^T] = 0\]
Berdasarkan karakteristik gangguan tersebut serta menggunakan manipulasi matematis, maka\(P_k\)pada persamaan (30) dapat dituliskan menjadi:
\[P_{k} = P_{k-1} - 2P_{k-1}H^{T}(P_{k-1}H^{T}(HP_{k-1}H^{T} - R)^{-1}) + (P_{k-1}H^{T}(HP_{k-1}H^{T} - R)^{-1}) \times ((HP_{k-1}H^{T} - R)P_{k-1}H^{T}(HP_{k-1}H^{T} - R)^{-1}) = P_{k-1} - K_{k}H(P_{k-1})^{T}.\] (31)
Berdasarkan persamaan (26) dan (29), estimasi variabel keadaaan pada waktuk+1 adalah\(\hat{x}_k=\phi\hat{x}_k\). Kesalahan estimasi pada waktuk+1 dalam hal ini dapat dituliskan sebagai berikut:
\[e_{k+1} = x_{k+1} - \hat{x}_{k+1} \phi x_k + w_k - \phi \hat{x}_k = \phi e_k + w_k. \tag{32}\]
Sehingga, nilai matriks kovariansi \(P_{k+1}\) menjadi:
\[\begin{split} P_{k+1} &= E(e_{k+1} + (e_{k+1}^T), \\ &= \phi \phi^T E[e_k e_k^T] + \phi E[e_k w_k^T] + \phi^T E[w_k e_k^T] \\ &+ E[w_k w_k^T], \\ &= \phi \phi^T E[e_k e_k^T] + 2\phi E[e_k w_k^T] + E[w_k w_k^T]. \end{split}\]
Dengan mensubstitusikan nilai\(e_{k+1}\)pada (32) dan asumsi bahwa\(E(e_k w_k^T) = 0\), dapat dituliskan:
\[P_{k+1} = \phi \phi^T P_k + 2\phi E[e_k w_k^T] + Q,\]
= \(\phi P_k \phi^T + Q.\) (33)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN : 2085-2517, e-ISSN: 2460-6340
Berdasarkan nilai di (33), maka nilai faktor penguat Kalman dapat ditentukan sebagai berikut:
\[K_k = P_{k-1}H^T(HP_{k-1}H^T + R)^{-1}. (34)\]
Dalam hal ini, estimasi variabel keadaan pada waktu dapat ditentukan secara iteratif sebagai:
\[\hat{x}_k = \hat{x}_{k-1} + K_k (Hx_k + v_k - H\hat{x}_{k-1}).\] (35)
4 Simulasi, Implementasi dan Analisis
Bab ini mengilustrasikan proses pemodelan, implementasi kontrol dan analisisSPT pada MATLAB. Parameter sistem yang disimulasikan terdiri dari massa gerobak = 0.19 kg, massa pendulum = 0.3 kg, panjang tongkat pendulum = 2m, percepatan gravitasi = 9.8 , serta momen inersia pendulum = 0.0225 .
Karena SPT di (21)dimodelkan pada ranah waktu kontiniu sementaraimplementasi tapis Kalmandidefinisikandalam ranah waktu diskrit, maka model (21) didiskritisasi terlebih dahulu pada simulasi. Proses diskritisasiini dilakukan menggunakan perintah C2D pada MATLAB dengan periode pencacahan (T) sebesar 0.4 detik.
Kondisi awal SPT yang disimulasikan terdiri dari dua kemungkinan, yaitu (i) pergerakan diawali oleh pendulum dan disusul oleh pergerakan gerobak ( = [1 0 0 0])dan (ii) pergerakan yang diawali dengan perpindahan gerobak yang disusul oleh pendulum ( = [0 0 1 0]).
Gambar 4menunnjukkan hasil simulasi dari respons lup tertutup SPT menggunakan LQR dengan kondisi awal = [1 0 0 0]. Grafik pada Gambar 4 menunjukkan bahwa pada waktu = 1, pendulumdiberikan disimpangkan dari posisi vertikal sehingga pada = 2 gerobak bergerak pada arah yang berlawanan dengan pendulum untuk mendorong pendulum kembali ke sumbu vertikal. Dengan penyesuaian posisi yang dilakukan gerobak tersebut, sudut penyimpangan pendulum terhadap referensi sumbu vertikal (Y) dapat diminimalisir. Berdasarkan grafik yang disajikan pada Gambar 4, dapat dilihat bahwa pendulum dan gerobak menjadi stabil setelah mengalami dua kali overshoot.
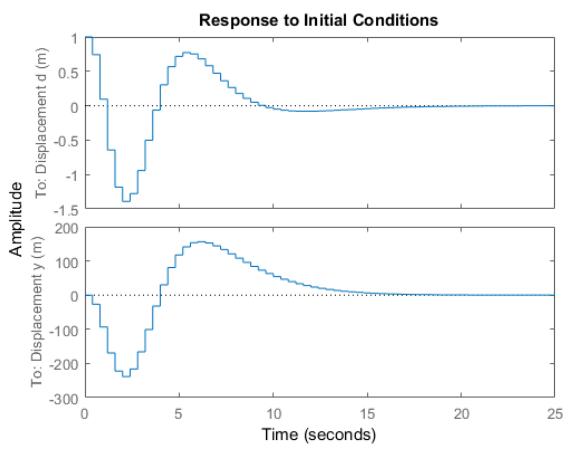
Gambar 4 Respons sistemuntuk\(x_1(0) = 1\).
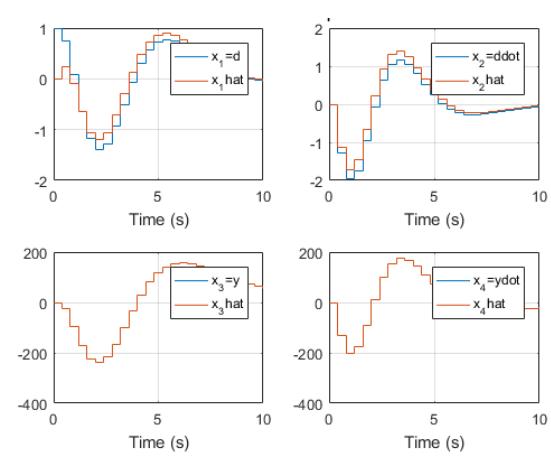
Gambar 5 Respons variabel keadaan aktual dan hasil estimasi untuk \(x_1(0) = 1\).
Gambar 5 menunjukkan respons keempat variabel keadaan SPT yang terdiri dari sudut pendulum \((x_1)\), kecepatan sudut pendulum \((x_2)\), posisi gerobak \((x_3)\), dan kecepatan gerobak \((x_4)\)yang diperoleh dengan tapis Kalman untuk kondisi awal \(x_0 = [1 \ 0 \ 0 \ 0]\). Gambar ini menunjukkan bahwa estimasi variabel keadaan \(x_1\) dan \(x_3\) secara asimptotis mencapai nilai aktualnya.
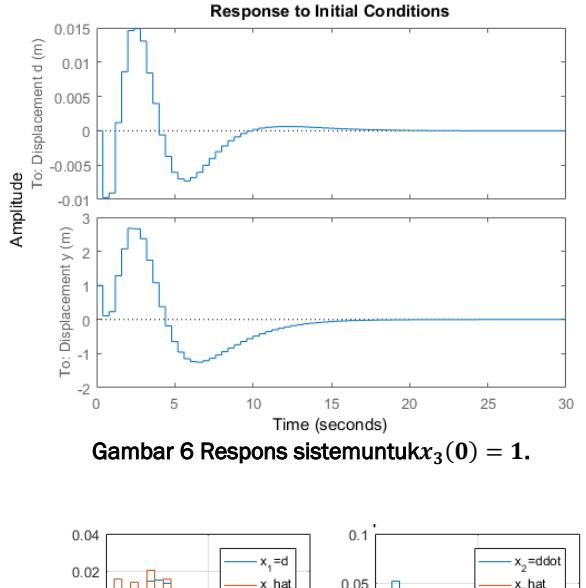
Gambar 6 menunjukkan respons lup tertutup SPT untuk kondisi awal \(x_0 = [0 \ 0 \ 1 \ 0]\). Grafik ini menunjukkan bahwa gerobak bergerak lebih dulu dibandingkan pendulum, sehingga pada k=2 gerobak didorong ke arah berlawanan untuk mengembalikan posisi pendulum pada sumbu vertikal.. Berdasarkan plot pada Gambar 6, dapat dilihat bahwa pendulum dan gerobak kembali stabil setelah mengalami dua kali overshoot. Gambar 7 menunjukkan respons keempat variabel keadaan SPTyang diperoleh dengan tapis Kalman untuk kondisi awal ini. Dapat terlihat pada gambar ini bahwa estimasi variabel keadaan \(x_1\) dan \(x_3\)juga mencapai nilai aktualnya secara asimptotis. Hal ini mengilustrasikan
performansi estimasi yang efektif dan optimal berbeda. dari tapis Kalman untuk kondisi awal
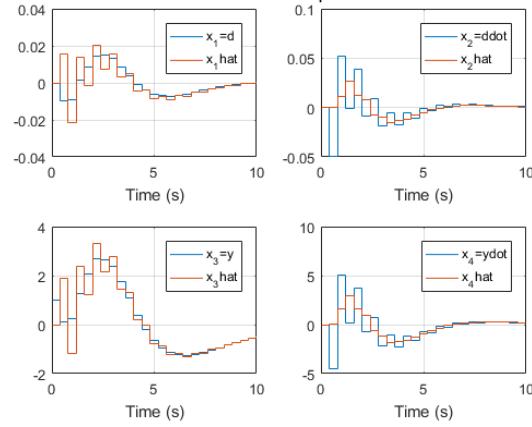
Gambar 7 Respons variabel keadaan aktual dan hasil estimasi untuk () = .
5 Kesimpulan
Makalah ini telah memaparkan studi pemodelan, perancangan pengontrol dan analisis SPT dengan metoda LQR serta estimator tapis Kalman. Simulasi numerik terkait implementa algoritma kontrol dan estimasi yang diusulkan menunjukkan bahwa pengontrol berbasis LQR yang dirancang mampu menjaga pendulum pada posisi vertikal secara stabil dan filter Kalman yang digunakan mampu mengestimasi nilai aktual variabel tidak terukur dala waktu yang relatif cukup singkat implementasi dalam
Penelitian selanjutnya akan diarahkan untuk mengimplementasikan secara praktis algoritma kontrol dan estimasi yang dikembangkan pada simulator SPT skala laboratorium laboratorium.
Selain itu, penelitian juga akan diarahkan untuk meninjau implementasi algoritma kontrol dan estimator nonlinear pada model nonlinear SPT.
6 Daftar Pustaka
- [1] O. Boubaker, 2012, "The inverted pendulum: A fundamental benchmark in control theory and robotics,"Proc. International Conference on Education and E-Learning Innovations (ICEELI), pp. 1-6.
- [2] C. Fathonah, 2016, Analisis Kestabilan dan Kontrol Optimal Double Pendulum Terbalik pada Kereta Menggunakan Metode Linear Quadratic Regulator (LQR), Disertasi Doktoral, Universitas Islam Negeri Maulana Malik Ibrahim.
- [3] M. B. Mochamad, B. S. Bayu D and B. AR Anom, "Sistem kontrol inverted pendulum pada balancing mobile robot, 2011, "Proc. 13th Industrial Electronics Seminar (IES), pp. 24-29.
- [4] M. W. Musthofa, 2009, "Desain linear quadratic regulator pada sistem inverted pendulum," Prosiding Seminar Nasional Matematika UNY, pp. 950-959.
- [5] A. Laksana and I. Setiawan, 2012, Balancing Robot Beroda Dua Menggunakan MetodeKendali Proporsional Integral, Disertasi Doktoral, Universitas Diponegoro.
- [6] R. Syam, 2015, "Rancang bangun self-balancing scooter sebagai moda trasportasi," JurnalMekanikal, vol. 6, no. 1, pp. 522-531.
- [7] H.-J. Lee and S. Jung, 2009, "Gyro sensor drift compensation by Kalman filter to control a mobile inverted pendulum robot system," Proc. IEEE International Conference on Industrial Technology, pp. 1—6.
- [8] K. Zhou, J. C. Doyle and K. Glover,1996, Robust and Optimal Control. Prentice Hall, New Jersey.
- [9] S. Haykin, 2004, Kalman Filtering and Neural Networks. John Wiley & Sons.
- [10] E. V. Kumar and J. Jerome, 2013, "Robust LQR controller design for stabilizing and trajectory tracking of inverted pendulum," Procedia Engineering, vol. 64, pp. 169-- 178.