
1 Pendahuluan
Pembangkit listrik tenaga mikro hidro (PLTMH) adalah pembangkit listrik tenaga air yang biasanya beroperasi dengan head di bawah 30m dan menghasilkan daya kurang dari 10kW [1, 2]. PLTMH merupakan salah satu solusi bagi permasalahan pasokan energi listrik di Indonesia, terutama untuk masyarakat di daerah terpencil yang tidak terjangkau jaringan listrik PLN. Pengembangan PLTMH ini sejalan dengan usaha pemerintah yang tertuang di dalam kebijakan energi nasional (KEN) untuk mengurangi ketergantungan terhadap bahan bakar fosil dengan meningkatkan kontribusi energi baru terbarukan (EBT), yang salah satunya adalah tenaga air [3].
Penggerak utama pembangkit listrik tenaga air adalah sebuah turbin air yang mengubah daya hidrolik aliran air menjadi daya mekanis. Daya mekanis tersebut diteruskan ke generator listrik yang mengubahnya menjadi daya listrik. Pada PLTMH biasanya digunakan turbin jenis cross flow karena turbin cross flow ini dapat diproduksi dengan teknologi yang relatif sederhana. Kesederhanaan teknologi ini sangat penting untuk menjamin keberlanjutan operasi PLTMH yang dikelola oleh masyarakat [4].
Unjuk kerja turbin turbin cross flow tergantung beberapa faktor seperti jumlah sudu, radius kelengkungan sudu, sudut serang, serta bentuk nosel dan pengarah aliran [5, 6, 7]. Pengaruh berbagai faktor tersebut dapat dipelajari baik melalui simulasi numerik menggunakan perangkat lunak computational fluid dynamics (CFD), maupun secara eksperimental dengan menggunakan alat uji unjuk kerja turbin.
Untuk mempelajari unjuk kerja turbin secara eksperimental, diperlukan pengukuran tekanan dan laju aliran (debit) air yang masuk ke turbin serta gaya pengereman dan kecepatan putar turbin [8]. Pengujian dilakukan pada berbagai kombinasi antara kondisi operasi dan parameter rancangan turbin. Untuk mengecek tingkat kepercayaan data, pada setiap kondisi pengukuran diambil beberapa sampel data. Mengingat banyaknya data yang harus dicatat pada saat eksperimen, pencatatan secara manual kurang praktis dan memiliki resiko kesalahan pencatatan yang tinggi. Untuk mengatasi permasalahan tersebut, pada penelitian ini dikembangkan sistem kendali dan akuisisi data otomatis agar pengujian unjuk kerja turbin dapat dilaksanakan dengan mudah dan sistematis. Agar komponen dapat diperoleh dengan mudah dan biaya relatif murah, dikembangkan sistem dengan perangkat berbasis Arduino.
2 Metodologi
Sistem kendali dan akuisisi data otomatis yang akan digunakan pada alat uji unjuk kerja turbin ditunjukkan pada gambar 1. Pengembangan sistem tersebut dijelaskan pada bagian berikut ini
Gambar 1 Alat uji unjuk kerja turbin dengan sistem akuisisi data otomatis.
2.1 Perancangan Sistem
Seperti ditunjukkan pada tabel 1, unjuk kerja turbin dipelajari dengan mengukur tekanan dan debit air masuk ke turbin serta kecepatan putar dan gaya pengereman
turbin. Dari data tekanan dan debit dapat dihitung daya hidrolik yang masuk ke turbin, sementara dari data kecepatan putar turbin dan gaya pengereman dapat dihitung daya mekanis yang dihasilkan turbin. Efisiensi turbin merupakan rasio antara daya mekanis dan daya hidrolik.
Pada penelitian ini, dikembangkan sistem akuisisi data otomatis untuk mempermudah pengukuran dan perekaman berbagai parameter unjuk kerja turbin. Sistem akuisisi data tersebut dirancang untuk dapat mengukur nilai berbagai parameter unjuk kerja turbin, menampilkan serta merekam data tersebut secara berkala. Perekaman data dapat dilakukan secara otomatis penuh, di mana proses perekaman dilakukan setiap selang waktu tertentu, tanpa memerlukan perintah perekaman. Perekaman juga dapat dilakukan secara semi manual, di mana perekaman dilakukan pada setiap selang waktu tertentu jika ada perintah perekaman, dan perekamaman akan berhenti jika ada perintah berhenti. Mode semi manual ini berguna jika pada eksperimen terdapat langkah persiapan atau pengaturan di mana nilai berbagai parameter tidak perlu direkam. Dengan perekaman ini, data hasil eksperimen dapat diolah lebih lanjut.
| No | Parameter | Sensor / Rumus |
|---|---|---|
| 1 | Tekanan masuk | Pressure |
| turbin, \(p_t\) [W] | transducer | |
| 2 | Laju aliran air | Flowmeter (pulse) |
| (debit), \(\dot{Q}\) [m3/s] | ||
| 3 | Kecepatan putar turbin, \(N_t\) [Hz] | Proximity sensor |
| 4 | Gaya pengereman turbin, \(F_b\) [N] | Load cell dengan chip HX711 |
| 5 | Dava hidrolik \(P_{i} = n \dot{O}\) | |
Tabel 1 Parameter pengukuran unjuk kerja turbin
Untuk merealisasikan fitur di atas, sistem akuisisi data dirancang memiliki perangkat input, perangkat pemroses, serta perangkat output seperti ditunjukkan pada gambar 2. Perangkat input terdiri dari flowmeter untuk mengukur debit aliran air, pressure transducer untuk mengukur tekanan masuk turbin, sensor proximity untuk mengukur kecepatan putar turbin, dan load cell untuk mengukur gaya pengereman turbin. Selain itu, ada 3 buah push button yang digunakan untuk mengendalikan proses perekaman. Push button Mode digunakan untuk mengubah mode perekaman dari mode Automatic (otomatis penuh) menjadi mode Manual (semi manual) atau sebaliknya. Pada mode Manual, push button Record dan Stop berfungsi untuk memulai dan menghentikan perekaman data. Agar data yang tersimpan dapat diorganisir dengan baik, alat akuisisi data dilengkapi dengan alat penanda waktu, yaitu sebuah real time clock (RTC).
Semua proses pada sistem akuisisi data dikendalikan oleh sebuah pengendali mikro (micro controller). Untuk mengukur berbagai parameter unjuk kerja, pengendali mikro membaca sinyal dari berbagai perangkat input, mengolah sinyal tersebut, kemudian menampilkan data ke LCD dan merekam data ke SD card secara berkala. Status catu daya dan status perekaman ditunjukkan dengan lampu indikator. Lampu indikator catu daya akan menyala jika catu daya masuk ke pengendali mikro, dan lampu indikator perekaman akan menyala jika alat dalam mode perekaman data. Pada mode Automatic lampu indikator perekaman akan selalu menyala, sementara pada mode Manual, lampu indikator menyala jika tombol Record ditekan dan mati jika tombol Stop ditekan.
2.2 Implementasi Sistem
Rancangan di atas diwujudkan dengan merangkai berbagai perangkat keras berbasis Arduino. Untuk mengantisipasi ukuran program yang relatif besar karena kompleksitas dalam akuisisi data dan pengendalian, digunakan board Arduino Mega 2560. Board ini memiliki pengendali mikro ATmega2560 yang memiliki kecepatan proses 16 MHz, flash
memory sebesar 256 kB, SRAM sebesar 8 kB, dan EEPROM sebesar 4 kB. Pada board Arduino Mega 2560 terdapat 54 pin input/output digital dan 16 pin input analog, yang sangat memadai untuk menangani berbagai perangkat input/output pada sistem akuisisi data ini.
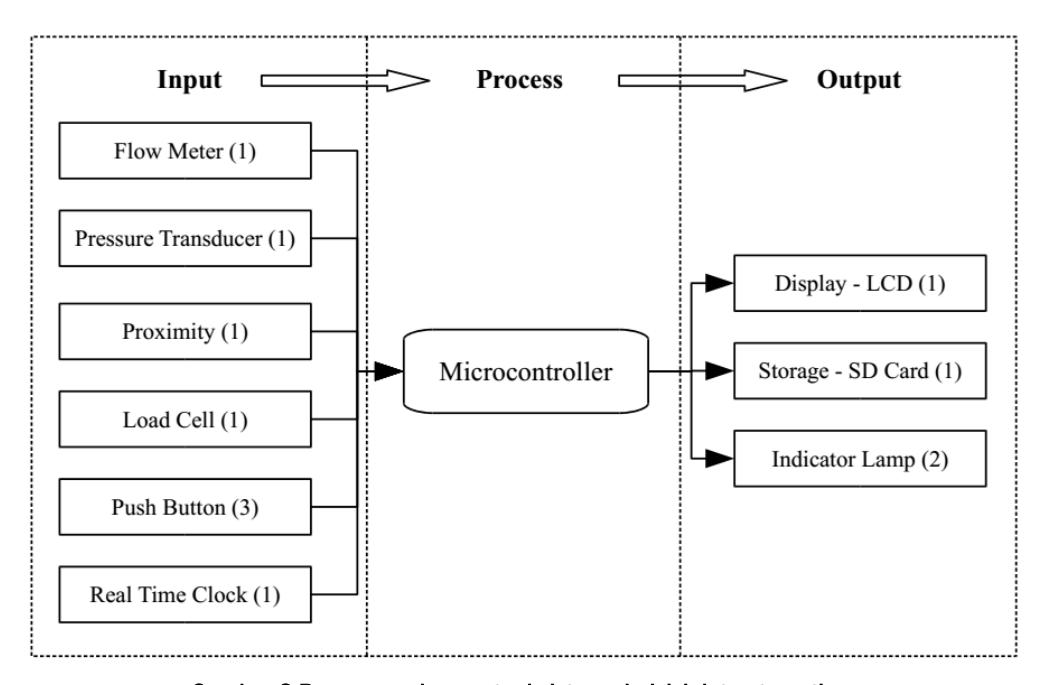
Gambar 2 Rancangan konseptual sistem akuisisi data otomatis
Parameter unjuk kerja turbin diukur dengan beberapa sensor yang dihubungkan dengan papan pengendali sebagai perangkat input. Tekanan air yang masuk ke turbin diukur menggunakan pressure transducer yang mengasilkan tegangan analog yang meningkat seiring dengan naiknya tekanan. Dengan mempertimbangkan bahwa head maksimum pompa sirkulasi adalah 10 m (setara dengan tekanan 0.1 MPa), digunakan pressure transducer dengan batas tekanan ukur paling rendah yang ada di pasaran, yaitu 1.2 MPa. Pressure transducer dihubungkan dengan pin analog pada papan pengendali dan sinyalnya dibaca menggunakan fungsi analogRead.
Debit aliran air yang masuk ke turbin diukur menggunakan flowmeter yang memiliki balingbaling yang membangkitkan pulsa tegangan dengan jumlah pulsa per satuan waktu yang meningkat jika debit aliran meningkat. Untuk menyesuaikan dengan ukuran pipa sirkulasi digunakan flow meter dengan diameter 2 inchi. Jalur data flow meter dihubungkan dengan pin digital pada papan pengendali. Sinyal pulsa tegangan dari flow meter dibaca menggunakan fungsi digitalRead.
Kecepatan putar turbin diukur menggunakan sensor proximity (tipe induksi) yang tegangannya berubah apabila didekatkan dengan logam pada jarak sekitar 2 mm. Dengan memasang proximity di sisi piringan dengan tonjolan logam yang berputar bersama poros turbin, dapat diperoleh jumlah pulsa tegangan per satuan waktu yang meningkat seiring dengan peningkatan kecepatan putar turbin. Jalur data sensor proximity dihubungkan dengan pin digital pada papan pengendali. Pembacaan sinyal dari sensor proximity sama dengan pembacaan sinyal dari flow meter.
Gaya pengereman turbin diukur meggunakan load cell yang menghasilkan tegangan yang nilainya sebanding dengan gaya pengereman. Untuk memperkuat dan mengubah sinyal analog dari load cell menjadi sinyal digital digunakan chip HX711, yang merupakan analog to digital (A/D) converter dengan resolusi 24bit. Pembacaan data pada chip HX711 ini dilakukan melalui jalur SCK dan DOUT yang dihubungkan dengan pin digital. Data dari chip HX711 dapat dibaca dengan fungsi khusus yang disediakan oleh library tambahan.
Input untuk mengendalikan proses perekaman diperoleh dari 3 buah push button yang masingmasing dihubungkan dengan pin digital dan sinyalnya dibaca dengan fungsi digitalRead. Selain itu, informasi waktu yang dibutuhkan untuk proses akuisisi data diperoleh dari RTC yang memiliki chip DS3231 dan koneksi I2C. Dengan konenksi I2C ini komunikasi data antara perangkat input dan pengendali mikro dilakukan melalui 2 jalur koneksi yaitu jalur SDA dan SCL yang dihubungkan dengan pin khusus pada papan Arduino. Koneksi I2C ini memungkinkan beberapa perangkat terhubung dengan pin SDA dan SCL yang sama dengan syarat perangkat tersebut memiliki alamat yang berbeda. Dengan demikian, rangkaian beberapa perangkat dengan koneksi I2C menjadi lebih sederhana.
Perangkat output terdiri dari perangkat penampil data, penyimpan data, dan indikator proses. Untuk menampilkan data yang diperoleh dari berbagai perangkat input digunakan LCD dengan 16 kolom dan 2 baris karakter. LCD ini memiliki koneksi I2C yang sama dengan RTC, tetapi masing-masing perangkat memiliki alamat yang berbeda. Data yang diperoleh dari perangkat input juga direkam menggunakan modul SD card yang memiliki koneksi SPI. Koneksi ini menggunakan 4 jalur komunikasi, yaitu MOSI, MISO, MOSI, MISO, dan CLK harus dihubungkan dengan pin khusus (pin 11, 12, 13, untuk Arduino Uno, pin 51, 52, 53 untuk Arduino Mega 2560), sementara CS dapat dihubungkan dengan sembarang pin digital. Status alat akuisisi data ditunjukkan dengan lampu LED. Untuk indikator catu daya, terminal positif dan negatif lampu LED dihubungkan dengan pin VCC dan GND pada papan pengendali. Untuk indikator perekaman, terminal positif lampu LED dihubungkan dengan pin digital yang tegangannya dikendalikan menggunakan fungsi digitalWrite. Ketika perekaman aktif pin diberi tegangan 5V.
2.3 Pengujian Sistem
Perangkat input/output dirangkai dengan papan pengendali secara bertahap. Setiap penambahan perangkat input/output dilakukan pengecekan fungsi dengan memprogram pengendali mikro untuk membaca sinyal dari perangkat input atau mengirimkan sinyal atau data ke perangkat output. Urutan perangkaian dan indikator fungsi masingmasing perangkat ditunjukkan pada tabel 2.
Tabel 2 Urutan perangkaian dan indikator fungsi
| No | Perangkat | Indikator Fungsi |
|---|---|---|
| 1 | LCD | Dapat menampilkan teks sesuai dengan yang dikirim oleh pengendali |
| 2 | Pressure transducer | Nilai pembacaan pin input (analog) yang terhubung tengan sensor meningkat jika tekanan meningkat |
| 3 | Flowmeter | Nilai pulsa tegangan per satuan waktu meningkat jika laju aliran (debit) meningkat |
| 4 | Proximity | Nilai pulsa tegangan per satuan waktu meningkat jika kecepatan putar meningkat |
| 5 | Load cell | Nilai yang terbaca dari chip HX711 meningkat jika beban meningkat |
| 6 | Push button | Nilai tegangan pada pin input berubah jika tombol ditekan |
| 7 | RTC | Data waktu RTC dapat disinkrokan dengan komputer dan data waktu terbarukan sesuai dengan penunjuk waktu lainnya |
| 8 | SD Card | Data dari pengendali dapat direkam dan dapat diakses dengan komputer |
| 9 | Lampu indikator | Lampu dapat dinyalakan/ dimatikan oleh pengendali |
Untuk sensor tekanan, dilakukan kalibrasi dengan melakukan pengukuran pada berbagai kondisi menggunakan sensor (pressure transducer) dan manonemeter komersial. Data hasil pengukuran diplotkan dengan nilai pembacaan pressure transducer sebagai sumbu x dan nilai dari manometer komersial sebagai sumbu y. Berdasarkan plot data tersebut dilakukan pencocokan kurva (curve fitting) untuk mencari fungsi kalibrasi yang memiliki koefisien kolerasi yang tinggi (mendekati 1). Fungsi kalibrasi tersebut selanjutnya diimplementasikan pada program yang dimasukan ke pengendali mikro untuk mengkonversi sinyal dari sensor menjadi besaran fisik yang terukur. Prosedur yang sama dilakukan untuk sensor lainnya menggunakan alat pembanding yang berbeda. Sensor gaya dikalibrasi dengan membandingkan pembacaan sensor dengan berat benda yang nilainya sudah diketahui. Untuk flow meter sudah disediakan fungsi kalibrasi dari produsennya, tetapi nilai yang diperoleh berdasarkan fungsi kalibrasi tersebut diverifikasi dengan pengukuran manual, yaitu dengan mengukur beda volume bak akibat aliran air dalam selang waktu tertentu. Untuk sensor proximity tidak perlu dilakukan kalibrasi karena kecepatan putar turbin diperoleh langsung dari jumlah pulsa tegangan per satuan waktu.
Setelah semua perangkat terangkai dan berfungsi dengan baik, dilakukan uji pengukuran unjuk kerja turbin untuk mengevaluasi unjuk kerja sistem akuisisi data secara keseluruhan. Pengujian dilakukan pada nilai debit tertentu dengan kecepatan putar turbin yang divariasikan dari kecepatan maksimum sampai kecepatan minimum dengan mengatur beban pengereman. Untuk memastikan fungsi perekaman tercapai, pengujian ini dilakukan dengan mode perekaman otomatis dan mode perekaman manual. Selain itu, untuk memastikan bahwa hasil pengukuran konsisten, pengujian dengan prosedur yang sama dilakukan berulang selama beberapa kali.
3 Hasil dan Pembahasan
3.1 Uji Fungsi dan Kalibrasi Sensor
Berbagai perangkat input/output yang ditunjukkan pada gambar 2 telah dirangkai dengan papan pengendali sesuai dengan urutan yang ditunjukkan pada tabel 2. Fungsi setiap komponen telah diuji, dan dipastikan bahwa fungsi yang diindikasikan pada tabel 2 telah tercapai. Pembacaan dari setiap sensor telah diverifikasi dan dikalibrasi. Sensor tekanan dikalibrasi dengan mengukur tekanan yang dihasilkan kolom air dengan ketinggian tertentu. Untuk itu, selang berisi air dihubungkan dengan sensor tekanan dan tinggi kolom air diatur dengan mengatur ketinggian ujung selang. Hasil pengukurannya diplotkan seperti pada gambar 3. Dari data tersebut diperoleh fungsi pendekatan y = 0.1493x + 15.007 yang dijadikan fungsi kalibrasi untuk mengubah nilai pembacaan pressure transducer (x), menjadi tinggi kolom air (y). Tekanan dapat diperoleh dengan mengalikan tinggi kolom air dengan masa jenis air (998 kg/m3) dan percepatan gravitasi (9.81 m/s2). Pada gambar 3 nampak bahwa rensponse sensor tekanan bersifat linear. Fungsi pendekatan yang diperoleh memiliki tingkat korelasi yang tinggi, yaitu 0,999, sehingga fungsi tersebut dapat digunakan sebagai fungsi kalibrasi dengan tingkat kepercayaan yang tinggi.
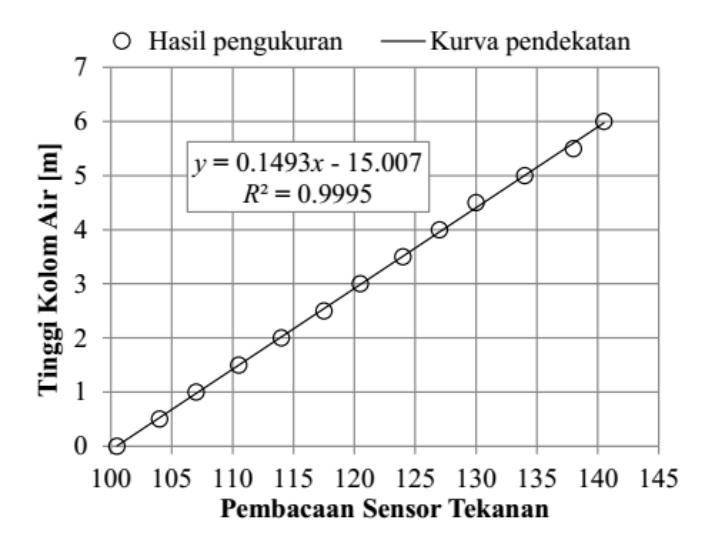
Gambar 3 Data kalibrasi sensor tekanan
Dengan prosedur yang sama, sensor gaya dikalibrasi dengan membebani load cell dengan benda uji yang memiliki berat yang sudah diketahui, dan hasil pengukurannya diplotkan pada gambar 4. Dari data tersebut diperoleh fungsi pendekatan linier y = 0,025558x dengan tingkat korelasi yang tinggi, yaitu 0,9997. Fungsi pendekatan tersebut dijadikan fungsi kalibrasi untuk mengkonversi nilai pembacaan load cell (x) menjadi nilai gaya yang terukur (y).
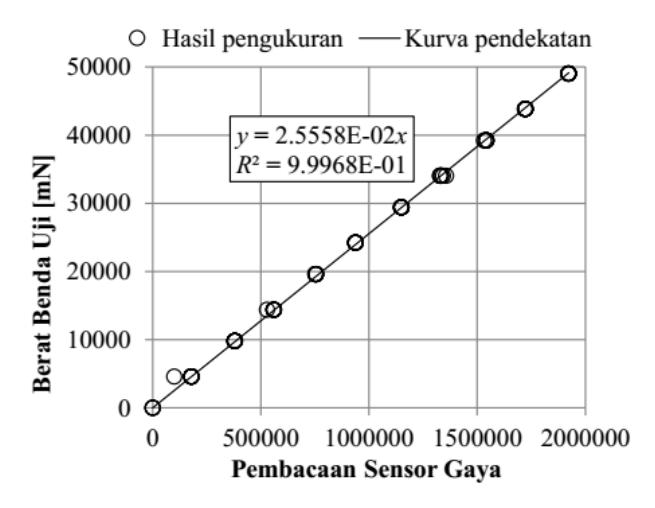
Gambar 4 Data kalibrasi sensor gaya
Data teknis flowmeter menyatakan bahwa satu pulsa per detik (1Hz) setara dengan debil 0,2 liter per menit. Untuk memastikan hubungan antara frekuensi pulsa dan debit, pembacaan pulsa per satuan waktu dari flowmeter dibandingkan dengan pengukuran perubahan volume air di dalam bak dalam selang waktu tertentu. Pada percobaan tersebut, flowmeter menunjukkan nilai x Hz, sementara volume air di bak bertambah y liter dalam waktu z menit. Dengan demikian pembacaan flowmeter dilkalikan dengan konstanta y/(xz) untuk memperoleh debit dalam liter/menit.
Untuk mengukur kecepatan putar turbin, sensor proximity dipasang menghadap piringan dengan 15 tonjolan logam yang berputar bersama poros turbin. Frekuensi putaran turbin diperoleh dengan mengukur jumlah pulsa tegangan per detik dan membagi nilai tersebut dengan 15.
3.2 Uji Fungsi Sistem Akuisisi Data
Fungsi sistem akuisisi data secara keseluruhan diuji dengan melakukan percobaan pengukuran unjuk kerja turbin pada berbagai kondisi pembebanan. Percobaan tersebut menunjukkan bahwa sistem keseluruhan telah berfungsi dengan baik. Pengendali mikro telah dapat membaca dan mengolah sinyal dari berbagai sensor, menampilkan data ke LCD, serta menyimpan data ke kartu memori. Mode perkaman dapat diubah dari mode otomatis dan mode manual atau sebaliknya dengan menekan push button. Pada mode manual, perekaman data berjalan (lampu indikator perekaman menyala) jika tombol start ditekan dan berhenti (lampu indikator mati) jika tombol stop ditekan. Nilai berbagai parameter dapat diamati pada LCD dan terekam pada SD card. Data yang terekam pada SD card dapat disalin ke komputer untuk diolah lebih lanjut.
Gambar 5 merupakan plot data hasil pengukuran yang menunjukkan hubungan antara kecepatan putar turbin dan gaya pengereman. Dari grafik tersebut nampak bahwa kecepatan putar turbin berkurang jika gaya pengereman bertambah. Grafik tersebut juga menunjukkan bahwa hasil pengukuran menggunakan alat akuisisi data cukup konsisten, karena untuk kondisi yang sama data yang diperoleh dari pengukuran yang berbeda menunjukkan hasil yang hampir sama.
Dari data gaya pengereman dan kecepatan putar turbin dapat dihitung daya mekanis yang dihasilkan turbin. Gambar 6 menunjukkan daya turbin pada berbagai kecepatan putar yang bersesuaian dengan gaya pengereman tertentu. Di sini nampak bahwa daya yang dihasilkan turbin cenderung meningkat jika kecepatan putar operasi dinaikkan sampai nilai tertentu, dan setelah itu daya akan turun jika kecepatan putar operasi terus dinaikkan.
Kecepatan putar optimum di mana daya turbin mencapai nilai maksimum, diperoleh pada nilai kecepatan putar sekitar setengah kali kecepatan putar maksimum. Kecenderungan tersebut sesuai dengan hasil eksperimen [5, 6, 8] maupun hasil simulasi [7] yang ada di literatur. Hal ini mengkonfirmasi validitas hasil pengukuran yang diperoleh menggunakan alat akusisi data yang telah dikembangkan pada penelitian ini. Selain itu, karena berbagai parameter unjuk kerja turbin dapat diukur, ditampilkan, dan direkam secara otomatis oleh sistem akuisisi data, eksperimen untuk mempelajari unjuk kerja turbin pada berbagai kondisi dapat dilakukan secara komprehensif dan sistematis.
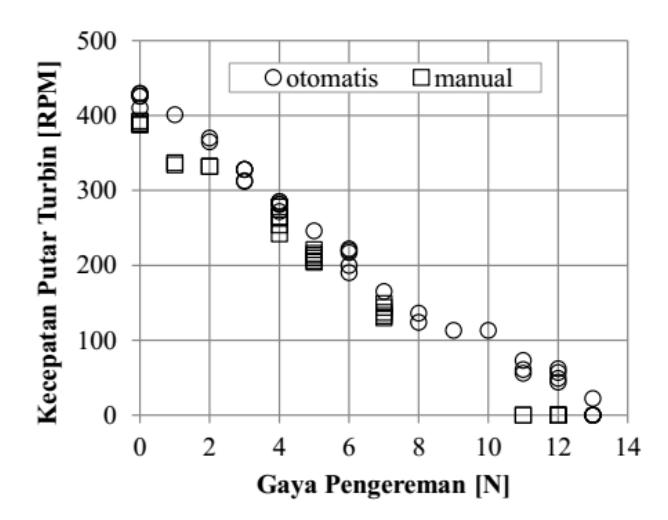
Gambar 5 Hasil uji coba alat: pengaruh gaya pengereman terhadap kecepatan putar turbin
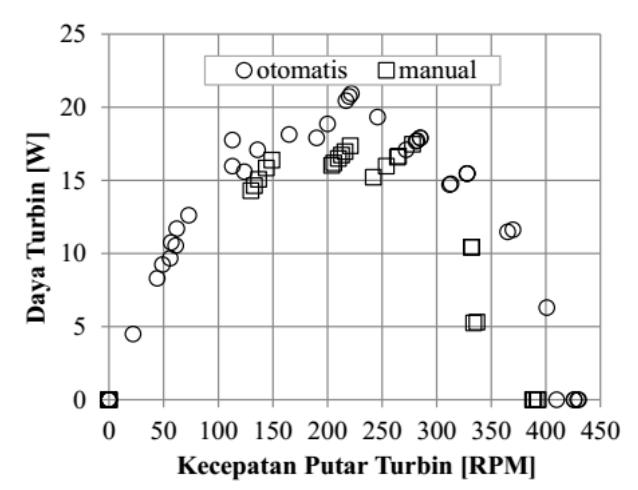
Gambar 6 Hasil uji coba alat: daya turbin pada berbagai kecepatan putar operasi
4 Kesimpulan
Pada penelitian ini telah dikembangkan sistem akuisisi data otomatis untuk alat uji unjuk kerja turbin air. Sistem tersebut dikembangkan menggunakan perangkat keras dan perangkat lunak open source berbasis Arduino. Hasil pengujian sistem keseluruhan menunjukkan bahwasistem telah berfungsi dengan baik. Pengendali mikro telah dapat membaca dan mengolah sinyal dari berbagai sensor, menampilkan data ke LCD, serta menyimpan data ke kartu memori. Hasil pengukuran unjuk kerja turbin menggunakan alat akuisisi data cukup konsisten sesuai dengan hasil eksperimen dan simulasi yang ada di literatur. Dengan pengukuran, penampilan dan perekaman berbagai parameter secara otomatis, eksperimen untuk mempelajari unjuk kerja turbin dapat dilakukan secara sistematis dan komprehensif.
5 Ucapan Terima Kasih
Penelitian ini terlaksana berkat dukungan dana dari Kemenristekdikti melalui hibah penelitian desentralisasi, yaitu Penelitian Terapan Unggulan Perguruan Tinggi (PTUPT) tahun anggaran 2018.
6 Daftar Pustaka
- [1] IRENA. 2012. "Hydropower," The International Renewable Energy, Bonn, Germany.
- [2] JICA. 2009. "Manuals and Guidelines for Microhydropower Development in Rural Electrification," Japan International Cooperation Agency,
- [3] Dewan Energi Nasional. 2016 "Outlook Energi Indonesia 2016," Dewan Energi Nasional, Jakarta.
- [4] A. Sunarso, H. Sihombing, Agato, I. G. Widodo dan D. Sulistiono. 2015. "Pengembangan Pembangkit Listrik Tenaga Air Untuk Masyarakat Terpencil," Laporan Akhir PENPRINAS MP3EI POLNEP, Pontianak.
- [5] K. Kokubu, T. Kanemoto, S.-W. Son dan Y.-D. Choi. 2012. "Performance Improvement of a Micro Eco Cross-Flow Hydro Turbine," Journal of the Korean Society of Marine Engineering, vol. 36, no. 7, pp. 902-909.
- [6] K. Kokubu, T. Kanemoto dan K. Yamasaki. 2013. "Guide Vane with Current Plate to Improve Efficiency of Cross Flow Turbine," Open Journal of Fluid Dynamics, , vol. 3, pp. 28-35.
- [7] V. Sammartano, C. Aricò, A. Carravetta, O. Fecarotta dan T. Tucciarelli. 2013. "Banki-Michell Optimal Design by Computational Fluid Dynamics Testing and Hydrodynamic Analysis," Energies, vol. 6, pp. 2362-2385.
- [8] N. H. Pereira dan J. E. Borges.2014. "A study on the efficiency of a Cross-Flow Turbine based on experimental measurements," dalam Recent Advances in Mechanical Engineering, www.wseas.org, WSEAS Press, pp. 63- 72.