
1 Pendahuluan
Seiring perkembangan teknologi di zaman modern seperti sekarang, khususnya bidang robotika, telah banyak membantu manusia menyelesaikan tugas dalam kegiatan seharihari. Teknologi robot tersebut seperti telah menjadi satu bagian dalam kehidupan bermasyarakat [1]. Sehingga robot yang pada awalnya hanya digunakan pada kegiatan industri, pada saat ini, teknologi robot tersebut dapat digunakan untuk mempermudah kegiatan manusia diberbagai sektor seperti pendidikan, pembangunan, kesehatan, rumah tangga, hiburan dll. Karena definisi robot itu sendiri adalah sebuah piranti yang terbentuk dari sistem mekanik, elektrik dan bekerja sesuai dengan algoritma pemrograman yang ditanamkan dalam pengendali robot tersebut sehingga robot dapat bekerja sesuai kebutuhan. Dalam pengoperasiannya, pengendalian robot dapat dilakukan dengan pengawasan manusia (manual) ataupun dengan menggunakan suatu algoritma pemrograman kecerdasan artifisial (otomatis) yang tidak memerlukan campur tangan manusia [2].
Salah satu jenis robot yang menjadi perhatian lebih oleh para peneliti adalah mobile robot yang merupakan jenis robot yang mampu melakukan pergerakan dari satu tempat ke tempat yang lain. Maka kemampuan untuk bergerak dan bernavigasi menjadi hal utama yang harus dimiliki oleh mobile robot.Sistem navigasi dan kecerdasan artifisial saling berkaitan sehingga dalam pengoperasian sistem mobile, dapat dilakukan secara otomatis [3].Sistem navigasi menjadi suatu bagian penting agar robot dapat bergerak secara mandiri. Kemudian metode kecerdasan artifisial dapat diaplikasikan pada navigasinya sehingga dapat meningkatkan kinerja robot tersebut [4]. Beberapa penelitian yang berkaitan dengan sistem navigasi gerak robot telah dilakukan oleh [5], [6], [7].
Maka berdasarkan latar belakang tersebut, sebuah robot lawn mower dirancang untuk mempermudah pekerjaan manusia. Tugas utama robot lawn moweradalah memotong rumput di suatu area, menghindari rintangan dan bergerak di sepanjang lintasan yang direncanakan. Sehingga robot lawn mower harus memiliki kemampuan untuk mengenali lingkungan, perencanaan lintasan dan pengambilan keputusan. Maka dalam hal ini salah satu aplikasi dari kecerdasan artifisial digunakan, yaitu algoritma pengendali fuzzy logic.
Dalam sistem navigasi robot lawn mower, pengendali fuzzy logicdigunakan untuk menguji kemampuan menemukan titik koordinat apakah sesuai dengan data pergerakan yang dimasukkan pada algoritma pengendali fuzzy logic yaitu maju, belok kanan, belok kiri dan putar balik. Untuk sistem koordinasi dan navigasi pada robot lawn mower ini sendiri yaitu menggunakan masukan 2 buah sensor yaitu sensor GPS Neo-6M dan sensor kompas HMC5883L sehingga robot lawn mower akan mencari titik koordinat yang ditargetkan dengan bergerak sesuai arah yang diperoleh dari sensor kompas. Sedangkan keluaran dari pengendali fuzzy logic berupa sinyal PWM untuk mengatur putaran pada kedua motor.
2 Dasar Teori
2.1 Pengendali Fuzzy Logic
Metode soft computing pertama kali dikenalkan oleh Prof. Lotfi Zadeh. Metode ini dibuat tanpa menggunakan model matematika sistem tetapi menggunakan metode yang meniru sistem kecerdasan manusia. Maka kemudian lahirlah metode fuzzy logic pada 1965 dari peniruan logika manusia. Fuzzy logicmemiliki nilai keabuan antara hitam dan putih, yang berati memiliki unsur kesamaran dan konsep tidak pasti. Beberapa hal yang perlu diketahui dalam memahami fuzzy antara lain variabel, himpunan dan domain. Himpunan fuzzy merupakan suatu grup yang mewakili suatu keadaan dalam suatu variabel fuzzy. Contoh variabel kecepatan yaitu lambat, sedang dan cepat seperti yang ditunjukkan pada gambar berikut :
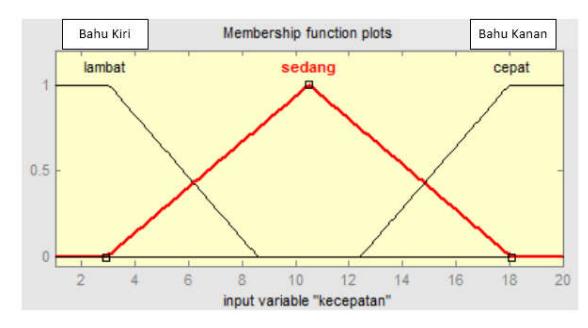
Gambar 1himpunan fuzzy pada variabel kecepatan
Teori fuzzy logic terinspirasi dari kemampuan manusia untuk mengatasi informasi yang tidak pasti berdasarkan persepsi. Dalam masukan pengendali fuzzy logic, terdapat tiga proses seperti yang terlihat pada gambar berikut :

Gambar 2tiga proses dalam pengandali fuzzy logic
Proses untuk mengubah suatu masukan non-fuzzy (variabel numerik) menjadi fuzzy (variabel linguistikseperti, dingin, sejuk, panas, lambat, sedikit cepat, cepat) dinamakan fuzzifikasi yang disajikan dalam bentuk himpunan fuzzy dengan fungsi keanggotaannya masing-masing. Fungsi keanggotaan adalah suatu kurva yang menunjukkan pemetaan titiktitik masukan data ke dalam nilai keanggotaannya. Maka salah satu cara yang yang dapat digunakan adalah melalui pendekatan fungsi.
selanjutnya, sistem inferensi fuzzy digunakan untuk mengembangkan sistem intelijen dalam lingkungan yang tidak pasti. Sistem inferensi fuzzy didasarkan pada teori himpunan fuzzy, aturan fuzzy berbentuk IF-THEN dan penalaran fuzzy.Sejumlahaturandapatdibuatuntukpengendalilogikafuzzy yang menghubungkanaksikeluaranpengendaliterhadapkondisimasukannya.
Sejumlahaturandapatdibuatuntukpengendalilogikasamar. Berikut merupakanperlakuan pada pengendalisistem yang akandibahas:
If (Arah is Sedikit Kiri) and (Arah is Lurus) then (Kecepatan Motor Kiri is Sedang) and (Kecepatan Motor Kanan is Cepat).
Defuzzifikasi merupakan langkah terakhir atau keluaran dari sistem pengendali fuzzy logic. Defuzzifikasi juga dapat didefinisikan sebagai perubahan besaran fuzzy dalam bentuk himpunan menjadi data pasti. Hal ini diperlukan karena dalam aplikasi nyata data-data yang diperlukan adalah nilai nyata (crisp) [8].
2.2 Sensor Kompas HMC5883L
Sensor HMC5883L adalah kompas digital yang dirancang untuk penginderaan magnet medan rendah dengan antarmuka digital. Sensor HMC5883L mencakup 12 bit ADC yang memungkinkan keakuratan kompas mencapai 1ᵒ sampai 2ᵒ [9]. Modul ini digunakan untuk keperluan sistem navigasi otomatis, handphone, netbook dan perangkat navigasi lainnya.
Gambar 3 sensor kompas HMC5883L
2.3 Sensor GPS Neo-6M
Modul GPS yang digunakan adalah berjenis uBlox Neo-6M yang dirancang untuk daya rendah. Dengan dimensi 16x12,2x2,4 mm, GPS ini cukup dapat diandalkan karena memiliki keakuratan yang cukup baik dan juga beberapa fitur yang cukup menguntungkan di antaranya terdapat baterai cadangan data, built-in elektronik kompas, dan built-in antena keramik untuk menangkap sinyal dengan kuat[10].
Gambar 4sensor GPS Neo-6M
3 Rancangan Alat
Pada perancangan alat, ada beberapa tahap yang dilakukan antara lain perancangan elektronik, perancangan pengendali fuzzy logic dan perancangan mekanik.
3.1 Perancangan Elektronik
Salah satu bagian penting dalam perancangan suatu robot adalah blok diagram. Cara kerja secara keseluruhan dapat dilihat sehingga menghasilkan suatu sistem yang dapat bekerja.
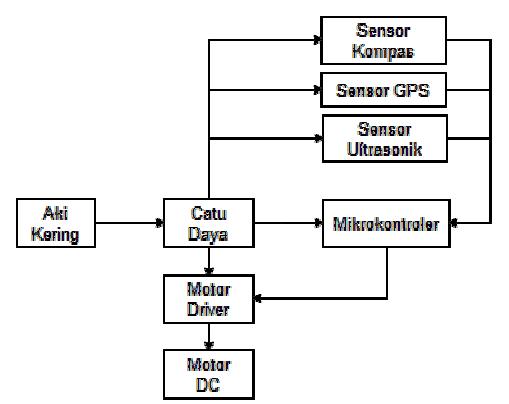
Gambar 5 diagram blok robot lawn mower
Penjelasan pada setiap blok antara lain:
- Salah satu blok masukan adalah sensor GPS Neo-6M. Titik Koordinat yang terbaca menjadi masukan mikrokontroler untuk mengecek tercapainya titik koordinat yang dituju.
- 2. Sensor kompas akan membaca derajat arah robot dan menjadi masukan ke dalam fuzzy logic yang kemudian diproses untuk mencapai titik tujuan yang ditentukan sehingga robot ttap dalam jalur.
- 3. Pada blok mikrokontroler, data-data yang diperoleh dari sensor akan diolah sehingga menghasilkan keluaran berupa pergerakan dari motor DC.
Selain blok diagram terdapat juga alur kerja dari robot lawn mower yang dimulai dari memasukkan data titik awal dan titik akhir dari sensor GPS, kemudian sensor kompas mendapatkan derajat kemiringan robot dan sensor ultrasonik membaca halangan. Berdasarkan data-data masukan yang kemudian diolah di mikrokontroler, maka keluaran
robot yaitu perputaran motor yang bergerak sesuai perintah. Seperti yang ditunjukkan pada gambar diagram air berikut :
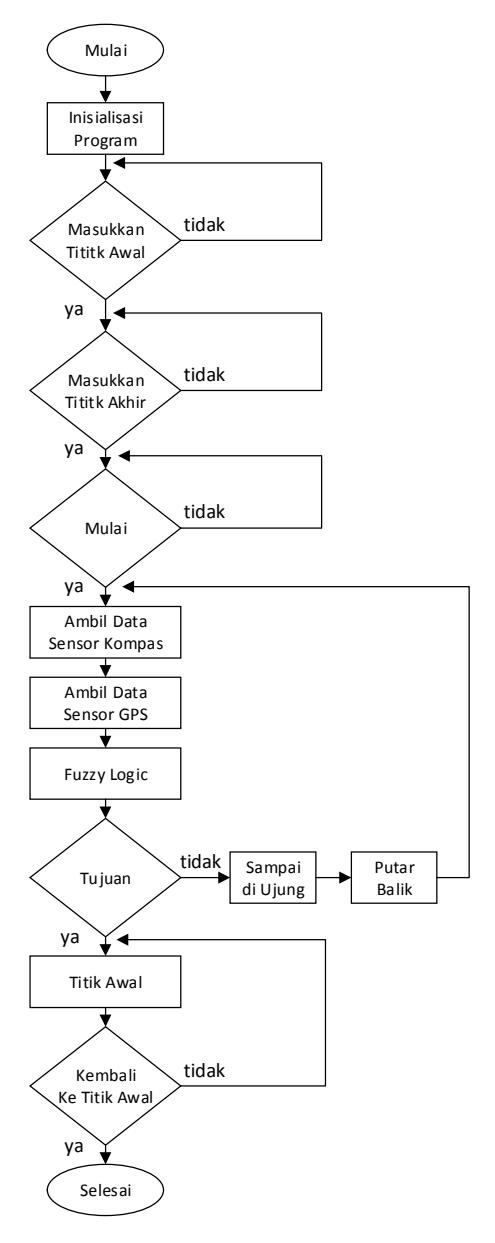
Gambar 6 diagram alir robot lawn mower
3.2 Perancangan Pengendali Fuzzy Logic
Pada perancangan perangkat lunak, penerapan algoritma pengendali fuzzy logic dilakukan dalam 3 tahap, yaitu fuzzifikasi, basis aturan fuzzy dan defuzzifikasi. Proses pembuatan
modifikasi untukmasukan berupa variabel berbentuk derajat (ᵒ) dan keluaran berupa PWM pada masing-masing motor DC untuk memutar roda. Dapat dilihat pada tabel 1 dan 2 berikut:
Tabel 1Variabel masukan Fuzzy Logic
| Sensor Kompas | Variabel |
|---|---|
| <(-15ᵒ) | JauhKanan |
| (-15ᵒ)-(-5ᵒ) | Kanan |
| (-10ᵒ)-0ᵒ | SedikitKanan |
| (-5ᵒ)-5ᵒ | Lurus |
| 0ᵒ-10ᵒ | Sedikit Kiri |
| 5ᵒ-15ᵒ | Kiri |
| >10ᵒ | Jauh Kiri |
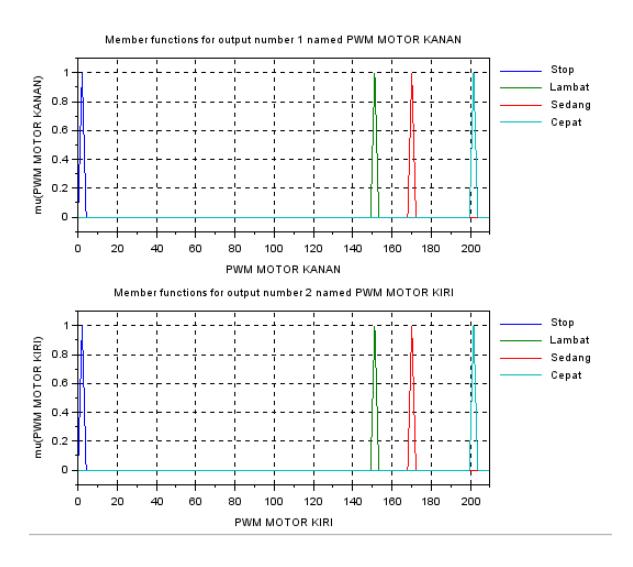
Tabel 2 Variabel Keluaran Fuzzy Logic
| Sinyal PWM | Variabel |
| 0 | Stop |
| 150 | Lambat |
| 170 | Sedang |
| 200 | Cepat |
Dengan himpunan fuzzy logic pada masukan dan keluaran yang digunakan, maka disusun basis aturan seperti pada tabel 3 berikut :
Tabel 3 Tabel basis aturan Fuzzy Logic
| Masukan | Keluaran (Motor) | ||
|---|---|---|---|
| Kiri | Kanan | ||
| Jauh Kanan | Kanan | Stop | Cepat |
| Kanan | Sedikit Kanan | Lambat | Cepat |
| Sedikit Kanan | Lurus | Sedang | Cepat |
| Lurus | Sedikit Kiri | Cepat | Sedang |
| Sedikit Kiri | Kiri | Cepat | Lambat |
| Kiri | Jauh Kiri | Cepat | Stop |
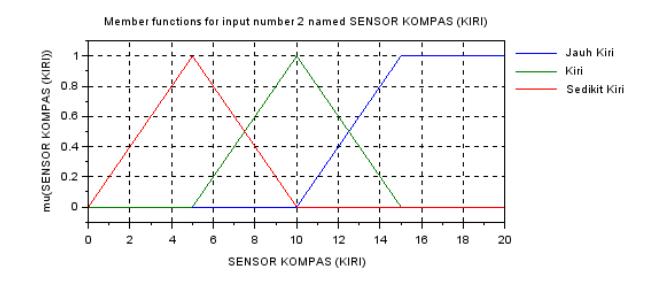
Selanjutnya adalah proses defuzzifikasi yang merupakan keluaran dari perancangan pengendali fuzzy logic dengan grafik derajat keanggotaan masukan sensor kompas sebagai berikut :
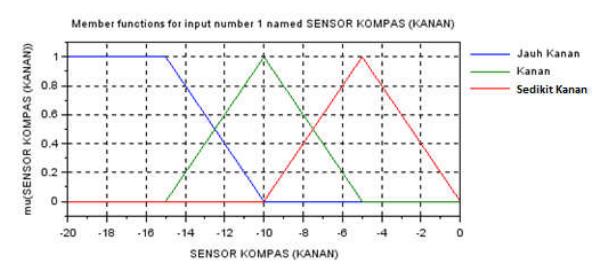
Gambar 7 derajat keanggotaan masukan sensor kompas kanan
Dari gambar 7 dapat disusun persamaan untuk menentukan nilai μ yang merupakan nilai derajat keanggotaan dari masukan tersebut.
derajat keanggotaan jauh kanan :
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN : 2085-2517, e-ISSN: 2460-6340
\[\begin{array}{lll} x \leq -15 & \mu = & 1 \\ -15 < x \leq -10 & \mu = & \frac{(-10) - x}{(-10) - (-15)} \\ x \geq -10 & \mu = & 0 \end{array} \tag{1}\]
derajat keanggotaan kanan :
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
derajat keanggotaan sedikit kanan :
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
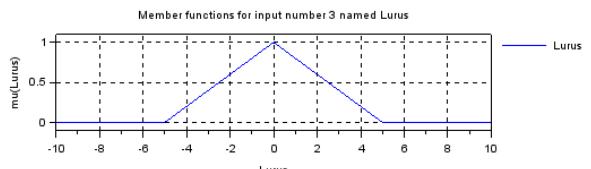
Gambar 8 derajat keanggotaan masukan sensor kompas lurus
derajat keanggotaanlurus :
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Gambar 9 derajat keanggotaan masukan sensor kompas kiri
derajatkeanggotaansedikit kiri :
\[x < 0\] \(\mu = 0\)
\(0 < x \le 5\) \(\mu = \frac{x - 0}{5 - 0}\)
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 11 (2), 2019 ISSN: 2085-2517, e-ISSN: 2460-6340
\[\begin{array}{lll} 5 < x \leq & 10 & \mu = & \frac{10-x}{10-5} \\ x \geq & 10 & \mu = & 0 & (5) \\ \text{derajat keanggotaan kiri:} & \\ x \leq & 5 & \mu = & 0 \\ 5 < & x \leq & 10 & \mu = & \frac{x-5}{10-5} \\ 10 < & x \leq & 15 & \mu = & \frac{15-x}{15-5} \\ x \geq & 15 & \mu = & 0 & (6) \\ \text{derajat keanggotaan jauh kiri:} & \\ x \leq & 10 & \mu = & 0 \end{array}\]
μ =
10 < x < 15
\(x \ge 15\)
grafik derajat keanggotaan masukan sensor kompas sebagai berikut:
x - 10
15-10
(7)
Gambar 10 derajat keanggotaan keluaran PWM motor
3.3 Perancangan Mekanik
Hardware robot lawn mower disusun dengan mekanik yang cukup kuat. Pada robot dirancang sebuah sistem minimum Arduino Mega2560 yang berbasis mikrokontroler ATMega 2560 sebagai pengendali, penggerak motor berbasis mosfet yang disusun secara H-Bridge yang mampu mengendalikan arah dan kecepatan dua buah motor DC sekaligus yang memiliki sistem gear sederhana, motor untuk pemotong dan dua buah modul sensor. Supply tegangan untuk robot ini menggunakan aki kering 12V 6Ah sebagai masukan ke rangkaian catu daya yang kemudian didistribusikan ke keseluruhan sistem.
Gambar 11 tampak depan robot lawn mower
4 Hasil dan Pembahasan
Pengujian robot lawn mower dilakukan dengan kemampuan untuk menemukan titik koordinat. Kemampuan tersebut sesuai dengan data yang dimasukkan ke pengendali fuzzy logic yaitu maju, belok kanan, belok kiri dan putar balik. Sistem koordinasi dan navigasi robot menggunakan sensor GPS dan sensor kompas. Dimana robot akan mencari titik koordinat yang ditujukan dengan berjalan sesuai arah yang didapat dari sensor kompas. Posisi GPSyang ditentukan dengan titik koordinat posisi robot pada awal mula bergerak adalah lattitude -2.992322 dan longitude 104.733993.
4.1 Pengujian Robot Mencari Titik Akhir
Pada tabel 4 di bawah dapat dilihat perubahan nilai derajat yang terbaca pada robot, perubahan tersebut mempengaruhi hasil pada perhitungan fuzzy logic yang menentukan nilai PWM kedua motor. Nilai PWM tersebut didapat dari persamaan fuzzifikasi yang telah dibuat sebelumnya. Nilai PWM yang berubah-ubah menandakan robot melakukan pergerakan ke arah yang dituju dengan mempertahankan arah jalannya sesuai dengan derajat arah yang dituju.
| 1 | 1 | |||
|---|---|---|---|---|
| Sudut Arah Kompas | Perhitungan Fuzzy | PWM Kiri | PWM Kanan | Arah Robot |
| 123.85° | 0.04 | 165 | 189 | Kiri |
| 123.23° | 0.08 | 192 | 168 | Kanan |
| 121.22° | 0.48 | 198 | 169 | Kanan |
| 122.08° | 0.31 | 198 | 169 | Kanan |
| 122.56° | 0.22 | 199 | 166 | Kanan |
| 115.91° | 0.45 | 198 | 149 | Kanan |
| 119.62° | 0.20 | 198 | 168 | Kanan |
| 118.13° | 0.10 | 196 | 147 | Kanan |
| 114.87° | 0.25 | 199 | 146 | Kanan |
| 121.00° | 0.47 | 199 | 169 | Kanan |
Tabel 4Tabel gerak robot menuju titik akhir
4.2 Pengujian Robot sampai ke Titik Akhir
Dalam pengujian ini robot akan kembali ke titik awal dengan bergerak kekiki sebesar 360ᵒ kemudian robot akan bergerak lurus.Tabel 5 merupakan pencatatan saat robot telah mencapai titik akhir maka robot akan berhenti bergerak selama 5 detik kemudian robot akan mengingat kembali nilai dari arah derajat ke titik awal. Robot akan menghitung berapa derajat robot akan berputar untuk mendapatkan sudut kearah titik awal dengan memasukkan nilai derajat arah yang terbaca oleh sensor kompas yang terpasang ke dalam fuzzifikasi untuk menentukan nilai PWM pada motor.
Tabel 5 Tabel gerak robot sampai di titik akhir
| Sudut Arah Kompas | Perhitungan Fuzzy | PWM Kiri | PWM Kanan | Arah Robot |
|---|---|---|---|---|
| 300.66ᵒ | 0.32 | 0 | 200 | Putar |
| 300.66ᵒ | 0 | 0 | 0 | Stop |
4.3 Pengujian Robot Mencari Titik Awal
Pada pengujian ini robot bergerak menuju ke titik awal (kembali ke asal) dengan nilai PWM motor yang bervariatif. Robot mencari titik awal yang sudah terekam sebelumnya saat memasukkan titik koordinat akhir. Robot kembali menjadikan nilai derajat yang terbaca, menjadi masukan dalam fuzzifikasi untuk menentukan kembali robot akan bergerak kemana. Namun, dalam proses menuju ke titik awal, robot akan mengutamakan bergerak ke arah 222.46ᵒ terlebih dahulu kemudian mengecek titik koordinatnya apakah telah sampai pada titik awal. Pergerakan robot terlihat pada tabel berikut :
Tabel 6 Tabel gerak robot menuju ke titik awal
| Sudut Arah Kompas | Perhitungan Fuzzy | PWM Kiri | PWM Kanan | Arah Robot |
|---|---|---|---|---|
| 268.47ᵒ | 1.00 | 0 | 200 | Putar |
| 227.76ᵒ | 0.47 | 150 | 200 | Kiri |
| 223.42ᵒ | 0.33 | 170 | 200 | Kiri |
| 220.09ᵒ | 0.05 | 200 | 170 | Kanan |
| 213.77ᵒ | 0.26 | 150 | 200 | Kiri |
| 211.11ᵒ | 0.21 | 150 | 200 | Kiri |
| 213.26ᵒ | 0.36 | 150 | 200 | Kiri |
| 219.23ᵒ | 0.17 | 200 | 170 | Kanan |
| 221.59ᵒ | 0.30 | 170 | 200 | Kiri |
| 220.26ᵒ | 0.03 | 170 | 200 | Kiri |
| 222.46ᵒ | 0 | 0 | 0 | Stop |
5 Kesimpulan
Berdasarkan rancang bangun, hasil pengujian dan analisis yang telah dilakukan, maka di peroleh kesimpulan sebagai berikut :
- 1. Untuk dapat mencapai titik koordinat yang dituju, robot menggunakan derajat arah sensor kompas yang terbaca sebagai input dalam pengendali fuzzy logic untuk menentukan nilai PWM motor yang digunakan untuk brgerak.
- 2. Nilai perhitungan metode fuzzy logic pada robot diperoleh sama dengan perhitungan manual yang digunaka.
- 3. Dalam pergerakannya, robot mampu melakukan pergerakan secara otomatis berdasarkan aturan dasar yang ditanamkan.
6 Daftar Pustaka
- [1] S. Lee, J. Lim, G. Tewolde, J. Kwon, "Autonomous Tour Guide Robot by using Ultrasonic Range Sensors and QR code Recognition in Indoor Environtment," 2014 IEEE International Conference on Electro/Information Technology (EIT), pp. 410-415, June 2014.
- [2] I. Engedy, G. Horvath, "Artificial Neural Network based Mobile Robot Navigation," 2009 IEEE International Symposium on Intelligent Signal Processing, pp. 241-246, August 2009.
- [3] Y. Y. Huang, Z. L. Cao, S.J. Oh, E. U. Kattan, E. L. Hall, "Automatic Operation for a Robot Lawn Mower" Cambridge Symposiom_Intelligent Robotics System, February 1987.
- [4] T.S. Hong, D. Nakhaeinia, B. Karasfi, "Application of Fuzzy Logic in Mobile Robot Navigation" Intech, pp. 22-36, March 2012.
- [5] D. Janglova, "Neural Network in Mobile Robot Motion," International Journal of Advanced Robotics Systems, vol. 1 number 1, pp. 15-22, March 2004.
- [6] S. Khan, M. K. Ahmmed, "Where am I? Autonomous Navigation System of a Mobile Robot in an Unknown Environment," 5th International Conference on Informatics, Electronics & Vision (ICIEV). Dhaka : Bangladesh. May 2016.
- [7] M. Song, M. S. N. Kabir, S. O Chung, Y. J. Kim, J. K. Ha, K. H. Lee, "Path Planning for Autonomous Lawn Mower Tractor," CNU Journal of Agricultural Science, vol. 42, no. 1, pp. 63-71, March 2015.
- [8] A. S. A. Yahmedi, M. A. Fatmi, "Fuzzy Logic Based Navigation of Mobile Robot," Intech Open Access Publisher, December 2011
- [9] Y. M. Abueejela, H. A. Ali, "Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic," Universal Journal of Control and Automation, pp. 13-18, 2018.
- [10]M. Haritha, T. Kavitha, G. Bhavadharni, V. Prabhu, "GPS Based Autonomous Vehicle Navigation in Robotics Along with Directionally," International Journal of Pure and Applied Mathematics, vol. 119, no. 15, 2018.
- [11]A. H. Pratama, E. Prihatini, S. Muslimin, "Metode Fuzzy Logic Dalam Intelegensi Gerak Robot Lawn Mower Otomatis Posisi Putar Balik,"
- [12]S. Jatmika, J. Wahyu, "Kontrol Navigasi Robot Beroda pada Kontes Robot Pemadam Api Indonesia (KRPAI) Menggunakan Fuzzy Logic," Seminar Nasional Instrumentasi, Kontrol dan Otomasi (SNIKO), Bandung, 10-11 Desember 2015.