
1 Pendahuluan
Bell prover merupakan salah satu alat yang dapat digunakan sebagai standar dalam pengujian meter gas[1, 2, 3]. Kebocoran pada saat pengujian harus lebih kecil dari 0,1% debit minimumnya pada rentang tekanan kerja instalasi uji[4]. Adapun pengujian tera dan tera ulang dilakukan pada 3 (tiga) debit yaitu :debit minimum (Qmin), 0,2 debit maksimum (Qmaks) dan debit maksimum dari meter gas yang akan diuji[4].Bell prover yang digunakan pada instalasi uji meter gas diafragma di Direktorat Metrologi Kementerian Perdagangan menggunakan skala jenis mekanik pada penunjukkan volume gas yang dialirkan. Akurasi pembacaan volume gas yang dialirkan oleh bell prover ke meter uji bergantung pada ketepatan dalam melihat skala. Skala volume bell prover dari 100 liter sampai 600 liter. Jarak antar skala penunjukkan volume yaitu 2 mm. Bell prover yang digunakan memiliki ketidakpastian pada nilai skala terkecil yaitu 0,58 liter [5].Untuk meningkatkan akurasi dalam melihat skala, dirancang sebuah alat bantu penunjukkan volume gas yang dialirkan dengan bantuan sensor ultrasonik tipe HC-04 yang terhubung dengan pada arduino. Alat bantu ini memanfaatkan jarak antara pemberat dengan lantai yang posisinya diarahkan vertikal. Perubahan jarak ini sebanding dengan perubahan jarak pada skala penunjukkan volume gas yang dialirkan. Sehingga, perubahan penunjukkan jarak pada skala memperlihatkan jumlah volume gas yang dialirkan dari bell prover.
Alat bantu ini dapat dikembangkan menjadi alat yang dapat mengatur valve sebelum dialirkan ke meter gas yang diuji [6]. Selain itu, bisa diatur jumlah volume gas yang dialirkan sesuai dengan kondisi pengujian. Untuk meningkatkan akurasi pengukuran jarak dengan sensor ultrasonik, bisa ditingkatkan menggunakan laserrangefinder atau laser-interferometer[7].
2 Prinsip Kerja Bell Prover
Pada Gambar 1.a adalah penampakkan bell prover di Direktorat Metrologi yang akan dipasang alat bantu penunjukkan skala. Gambar 1.b adalah komponen dari bell prover. Sedangkan pada Gambar 1.c adalah penunjukkan skala volume bell prover.
(a)
Gambar 1(a) Bell Prover di Direktorat Metrologi (b) Komponen Bell Prover(c) Skala Bell Prover
Prinsip kerja Bell proveryaitu memanfaatkan gaya tekanan oleh sungkup akibat gaya berat sungkup itu sendiri. Sungkup diisi udara atau gas oleh pompa udara sampai terisi penuh agar sungkup naikke atas yang dibantu juga oleh bobot pengatur kecepatan alir. Ketika sungkup pada posisi teratas, valve pada pipa ke meter gas uji pada posisi tertutup. Kemudian gas dialirkan kemeter gas uji dengan membuka valve yang disesuaikan dengan ketentuan pengujian. Jumlah volume gas ditunjukkan pada skala, merupakan volume gas yang dialirkan ke meter gas yang akan diuji.
3 Rancang Bangun Alat Bantu Pembacaan Skala Bell Prover
Sensor ultrasonik digunakan untuk mengukur jarak x pada Gambar 1.a, sedangkan pembacaan skala penunjukkan volume yaitu jarak y pada Gambar 1.a dengan y nomor 1 (600 liter) dan y nomor 2 (100 liter). Sensor dipasang di bobot pengatur kecepatan alir atau pada posisi x nomor 2 Gambar 1.a, sedangkan bidang pantul yaitu bobot pengatur kecepatan pada posisi x nomor 1 Gambar 1.a. Untuk mengurangi pengaruh bidang lain disekitarnya yang dapat mempengaruhi gelombang pantul maka proses pengukuran sensor dilakukan dengan bantuan bidang silinder yang menutupi sensor dan bidang pantul.
a. Blok Diagram
Pada Gambar 2 dapat dilihat Blok Diagram dan Gambar 3 merupakan diagram perancangan alat
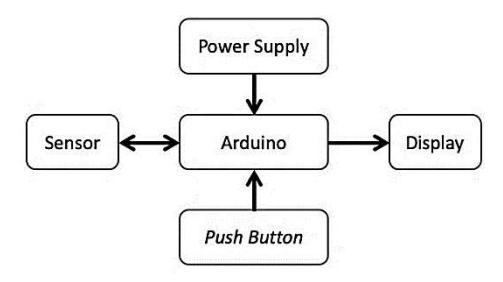
Gambar 2 Blok Diagram Alat Bantu Pembacaan Volume Bell Prover
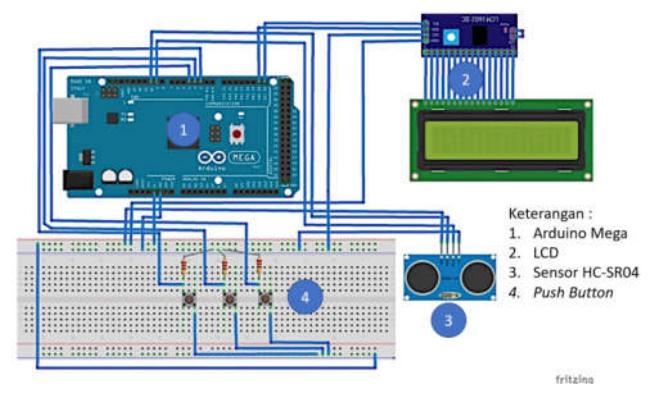
Gambar 3 Perancangan Alat Bantu Pembacaan Volume Bell Prover
Microcontroller yang digunakan yaitu arduino mega, sensor ultrasonik yang terhubung dengan microcontroller berfungsi sebagai pengirim gelombang ultrasonik dan dapat pula berfungsi sebagai penerima gelombang ultrasonik. Waktu tempuh gelombang dengan obyek pantul dapat merepresentasikan jarak antara sensor dengan obyek pantul. Jarak yang dihitung oleh microcontroller ditampilkan pada layar LCD. Sedangkan push button berfungsi untuk mencatat posisi setiap ada perubahan jarak pada posisi yang diinginkan.
b. Perancangan Alat
Secara keseluruhan perangkat keras yang digunakan pada alat bantu pembacaan skala volumebell proverdapat dilihat pada Gambar 5.Komponen utama yang digunakannya adalah :
- Arduino Mega
Mikrokontroler berbasiskan ATmega2560. Arduino ini memiliki 54 pin masukan/keluaran digital (14
pin dapat digunakan sebagai keluaran PWM), 16 input analog, 4 UART (port serial perangkat keras),
osilator kristal 16 MHz, koneksi USB, soket listrik, header ICSP, dan tombol reset.
- Sensor Ultrasonik HC-SR04 Sensor ultrasonik adalah sensor yang memancarkan gelombang ultrasonik melalui transmitter dan menerima gelombang pantul dari obyek yang diterima oleh receiver. Gelombang ultrasonik (akustik) memiliki frekuensi > 20 kHz. Sensor ultrasonik terbuat dari bahan piezoelektrik, bahan tersebut jika diberikan tekanan akan menghasilkan muatan listrik pada kedua permukaannya. Begitu juga sebaliknya, jika bahan tersebut diberikan tegangan, maka kedua permukaannya akan menghasilkan tekanan. Pelat merupakan bahan elastik yang memiliki konstanta elastik tertentu, sehingga tebalnya akan berubah-ubah. Jika diberikan tegangan bolak-balik, maka permukaannya akan bergetar. Bergetarnya permukaan ini menghasilkan gelombang (ultrasonik) yang memiliki frekuensi > 20 kHz. Cepat rambat gelombang ultrasonik di udara dapat dihitung dengan persamaan di bawah ini
\[c = \sqrt{\frac{\gamma P_0}{\rho_0}} = \sqrt{\frac{(1,402)(1,013x10^5)}{1,21}} = 343 \frac{m}{s}\] (1)
Dengan mengukur lamanya waktu tempuh gelombang ketika dipantulkan sampai diterima kembali, maka jarak antara sumber gelombang dengan obyek pantul dapat ditentukan. Pada Gambar 4 di bawah ini diperlihatkan timing chart HC-SR04.
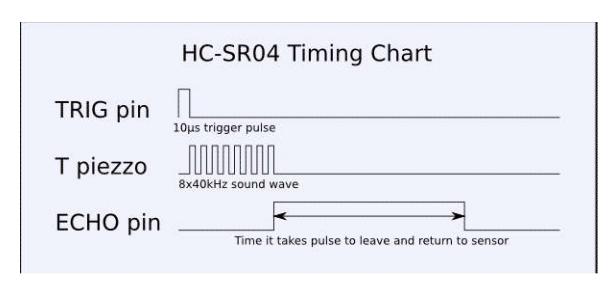
Gambar 4 HC-SR04 Timing Chart[8]
maka waktu yang dibutuhkan untuk menempuh jarak 1 cm adalah 58,77 µs [8].
- LCD Display 16x2
- Push Button
Gambar 5 Skema Pemasangan Push Button Sebagai Fungsi Pencatatan Posisi
Ketiga push buttonpada Gambar 5 itu memiliki fungsi yang berbeda-beda, yaitu :
- Push button 1 berfungsi sebagai pencatat posisi awal.
- Push Button 2 berfungsi sebagai pencatat posisi akhir.
- Push button 3 berfungsi untuk menghitung selisih antara posisi awal dan posisi akhir.
Ketiga push button tersebut dioperasikan secara manual yang disesuaikan dengan posisi pada skala untuk titik-titik pengujian meter gas.
4 Hasil dan Pembahasan
Pengujian alat bantu pembacaan skala volume bell prover terdapat 2 (dua) langkah, yaitu :1. tahap penentuan persamaan antara hasil pengukuran sensor dan pembacaan skala bell prover(kalibrasi). 2. tahap pengujian. Pada tahap ke-1, pembacaan sensor disesuaikan dengan hasil pengukuran pada saat jarum skala volume bell prover tepat di skala penunjukkan.Skala penunjukkan bell prover siukur dengan rentang 100 liter sampai 600 liter dengan beda 100 liter.Data hasil pengukuran sensor setiap volume bell prover pada tahapke-1 dapat dilihat pada table 1 di bawah ini.
| No | Volume Bell Prover (liter) | Pengukuran Sensor Tanpa Selubung (mm) | Pengukuran Sensor Dengan Selubung (mm) | ||||
| (1) | (2) | (3) | (1) | (2) | (3) | ||
| 1 | 600 | 1590 | 1589 | 1589 | 1590 | 1587 | 1586 |
| 2 | 500 | 1323 | 1322 | 1324 | 1323 | 1320 | 1319 |
| 3 | 400 | 1070 | 1068 | 1067 | 1070 | 1067 | 1066 |
| 4 | 300 | 813 | 811 | 812 | 813 | 810 | 812 |
| 5 | 200 | 566 | 540 | 539 | 566 | 563 | 562 |
| 6 | 100 | 304 | 280 | 279 | 304 | 301 | 300 |
Tabel 1Hasil Pengukuran Sensor untuk Kalibrasi
Dari Tabel 1 dibuat 2 (dua) buah grafik hasil pengukuran sensor terhadap pembacaan volume bell prover. Pada Gambar 6.a untuk sensor tanpa selubung sedangkan Gambar 6.b untuk sensor dengan selubung.
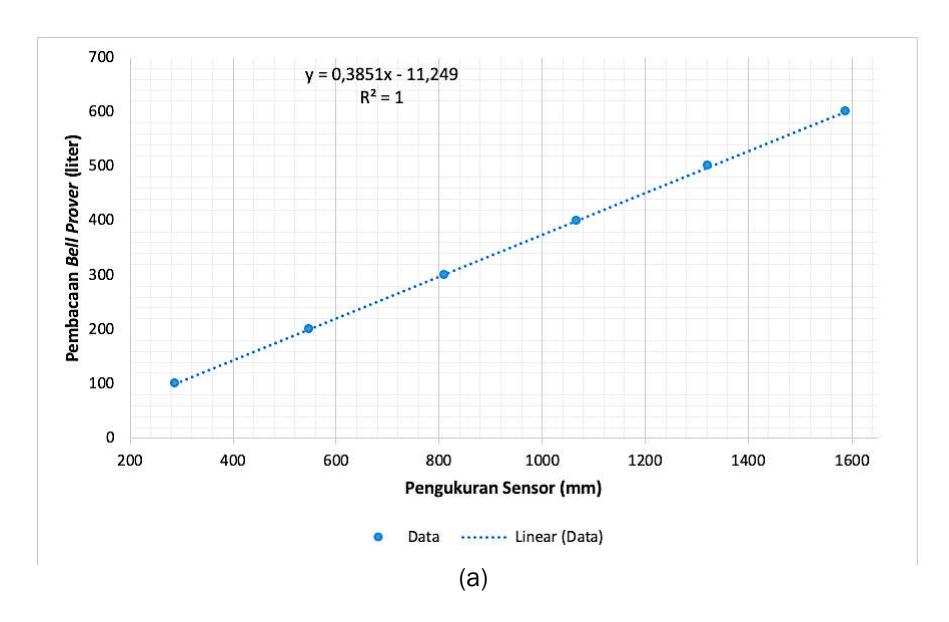
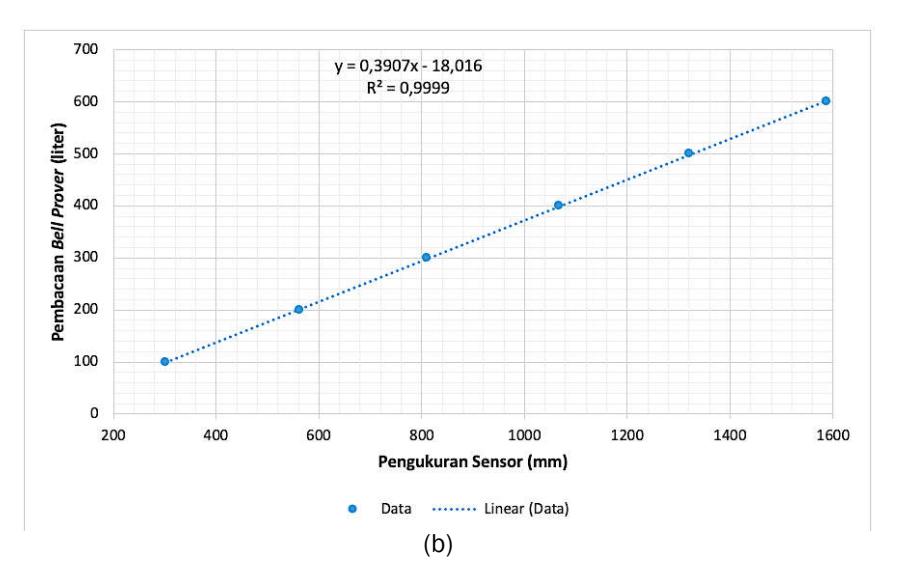
Gambar 6 Grafik Pengukuran Sensor terhadap Pembacaan Volume Bell Prover (a) tanpa selubung (b) dengan selubung
Dalam hal ini berlaku persamaan linier orde satu, yaitu
\[y = mx + c \tag{2}\] dengan:
c = Kontanta
m = Gradient
\(\chi\) = Jarak Sensor (mm)
y = Volume Bell Prover (liter)
Maka, didapat persamaan garis untuk kedua grafik pada Gambar 6.a dan Gambar 6.b, yaitu:
\[y = 0.3851x - 11.249 \tag{3}\]
\[y = 0.3907x - 18.016 \tag{4}\]
Hasil kalibrasimerupakan persamaan (3) dan persamaan (4), dimana persamaan (3) merupakan hasil pengukuran sensor dengan pembacaan skala untuk sensor tanpa selubung dan persamaan (4) sensor dengan selubung. Pada persamaan (3) didapat R²=1 sedangkan untuk persamaan (4) didapat R²=0,9999. Untuk itu selubung pada sensor dan obyek pantul tidak memikili pengaruh. Sehingga, persamaan yang digunakan diarduino yaitu persamaan (3).Pemilihan persamaan linier orde satu dipilih karena perubahan jarak pembacaan sensor sebanding dengan perubahan jarak skala volume pada bell prover.
Tabel 2 Hasil Pengukuran Sensor Setelah Kalibrasi
| No | (Data ke-1) | (Data | ke-2) | (Data ke-3) | ||
|---|---|---|---|---|---|---|
| No | x1 (mm) | y1 (liter) | x2 (mm) | y2 (liter) | x3 (mm) | y3 (liter) |
| 1 | 1582 | 597,95 | 1581 | 597,56 | 1585 | 599,10 |
| 2 | 1441 | 543,65 | 1448 | 546,35 | 1443 | 544,42 |
| 3 | 1245 | 468,18 | 1249 | 469,72 | 1186 | 445,46 |
| 4 | 879 | 327,24 | 882 | 328,39 | 825 | 306,44 |
| 5 | 694 | 256,00 | 697 | 257,15 | 644 | 236,74 |
| 6 | 404 | 144,32 | 410 | 146,63 | 349 | 123,14 |
Tabel 2 memperlihatkan posisi pembacaan dari sensor dengan keluaran volume hasil kalibrasi yang diulang sebanyak 3 (tiga) kali. Kolom y1, y2 dan y3 dalam liter merupakan hasil perhitungan menggunakan persamaan (3) Sebagai contoh data pengulangan yang kedua pada urutan no 2 pada posisi 1448 mm dengan volume 546,35 liter dan volume bell prover 548,5 liter dapat dilihat pada Gambar 7 di bawah ini
Gambar 7 (a) Posisi Pembacaan Sensor Pada Jarak 1448 mm (b) Hasil Pembacaan Volume Bell Prover
Pada posisi ini alat bantu pembacaan skala bell prover memiliki kesalahan sebesar 0,39% terhadap pembacaan skala pada bell prover itu sendiri. Contoh yang lain yaitu pada pengulangan yang kedua pada urutan no 4 pada posisi 882 mm dengan volume 328,39 liter dan volume bell prover 326,75 liter dapat dilihat pada Gambar 8 di bawah ini
Gambar 8 (a) Posisi Pembacaan Sensor Pada Jarak 882 mm (b) Hasil Pembacaan Volume Bell Prover
Pada posisi ini alat bantu pembacaan skala bell prover memiliki kesalahan sebesar 0,5% terhadap pembacaan skala pada bell prover. Untuk mendapatkan nilai akurasi (tabel 3) setiap volume bell prover, dapat menggunakan persamaan (2) hasil kalibrasi dengan data pada tabel 1. Pada Gambar 7 dan Gambar 8, alat bantu hanya memperlihatkan jarak saja, hal ini dikarenakan keterbatasan pada saat pengambilan dokumentasi ketika proses penentuan persamaan konversi dari jarak ke volume. Alat bantu ini telah memiliki penunjukkan volume, namun dokumentasinya tidak ada karena keterbatasan ijin penggunaan bell provertersebut.
Tabel 3 Akurasi Alat Bantu Pada Nilai Volume Bell Prover
| No | Volume Bell Prover (liter) | Pembacaan Volume Alat Bantu (liter) | Akurasi | Kesalahan | |||
|---|---|---|---|---|---|---|---|
| (1) | (2) | (3) | Rerata | (%) | (%) | ||
| 1 | 600 | 601,03 | 600,65 | 600,65 | 600,77 | 99,76 | 0,02 |
| 2 | 500 | 498,21 | 497,83 | 498,60 | 498,21 | 99,41 | 0,59 |
| 3 | 400 | 400,79 | 400,02 | 399,63 | 400,15 | 99,52 | 0,40 |
| 4 | 300 | 301,82 | 301,05 | 301,44 | 301,44 | 99,14 | 0,09 |
| 5 | 200 | 206,71 | 196,69 | 196,31 | 199,9 | 91,11 | 8,89 |
| 6 | 100 | 105,82 | 96,57 | 96,19 | 99,53 | 83,17 | 16,83 |
Pada rentang 100 – 600 liter pembacaan volume bell proveralat bantu pembacaan memiliki akurasi terkecil yaitu 83,17% dan akurasi terbesar yaitu 99,76%. Akurasi terkecil didapat pada volume 100 liter sedangkah akurasi terbesar didapat pada volume 600 liter.Sedangkan kesalahan terkecil yaitu 0,02% dan kesalahan terbesar yaitu 16,83%. Kesalahan terkecil didapat pada volume 600 liter sedangkan kesalahan terbesar didapat pada volume 100 liter. Pada volume 100 liter memiliki akurasi dan kesalahan kurang baik dibandingkan dengan titik volume lainnya dikarenakan posisi sungkup pada volume 100 liter terletak pada posisi terbawah. Hal ini bisa disebabkan karena kemungkinan terjadinya regangan pada tali penggantung sungkup. Diperlukan penelitian lebih lanjut untuk mengetahui penyebab nilai akurasi dan kesalahan yang kurang baik pada volume 100 liter.
5 Kesimpulan
Alat bantupembacaanskala volume bell prover menggunakan sensor ultrasonik jenis HC-SR04 memanfaatkan jarak bobot pengatur kecepatan alir pada bell prover dengan lantai. Perubahan jarak sebanding dengan perubahan penunjukkan skala volume bell prover. Alat bantupembacaan ini memiliki akurasi terendah dan kesalahan terbesar pada volume 100 liter. Sedangkan untuk akurasi tertinggi dan kesalahan terendah pada volume 600 liter dengan rentang 100 – 600 liter volume bell prover.
6 Kesimpulan
- [1] J. D. Wright and G. E. Mattingly, "NIST Calibration Services for Gas Flow Meters; Piston Prover and Bell Prover Gas Flow Facilities," NIST Special Publication, vol. 250, p. 49, 1998.
- [2] GMG PTB-100, "Gasmessglocke (bell prover) bauart PTB".
- [3] TUVNEL, "The Calibration of Flow Meters," in Good Practice Guide, TUV NEL.
- [4] D. Kemendag, Syarat Teknis Nomor 29/PDN/KEP/3/2010 Tentang Meter Gas Diafragma, Jakarta: Kementerian Perdagangan, 2010.
- [5] CJGM, Evaluation of measurement data Guide to the expression of uncertainty in measurement, BIPM, 2008.
- [6] J. A. Prakosa and L. P. Kozlova, "Design and Simulation of Automatic Control Valve for Gas Flow Meter Calibrator of Bell Prover," IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, 2018.
- [7] H. M. Choi, K.-A. Park and Y. M. Choi, "Uncertainty evaluation procedure and intercomparison of bell provers as a calibration system for gas flow meters," Flow Measurement and Instrumentation, vol. 21, pp. 488-496, 2010.
- [8] "EZdenki," [Online]. Available: http://www.ezdenki.com/ultrasonic.php.
7 Acknowledgement
Makalah ini merupakan hasil proyek akhir mahasiswa program D3 Metrologi dan Instrumentasi dengan bantuan pembiayaan pada Program Pendampingan Akademi Metrologi dan Instrumentasi oleh Teknik Fisika ITB Fakultas Teknik Industri ITB.