
1 Pendahuluan
Tangki Ukur Tetap Silinder Tegak atau disingkat TUTSIT (Gambar 1) merupakan sebuah tangki ukur yang terdiri dari silinder yang berdiri tegak, diletakkan di tempat yang tetap serta atap berbentuk kerucut atau kubah[1]. Sesuai dengan namanya, TUTSIT digunakan sebagai alat ukur, khususnya untuk mengukur volume cairan. Cairan-cairanyang dimaksud adalah bahan bakar minyak, bahan bakar gas yang dicairkan, cairan nabati, alkohol, cairan kimia dan air yang memiliki tekanan mendekati tekanan udara luar[1]. Berdasarkan hal tersebut, TUTSIT perlu dijaga akurasi penunjukan volumenya dengan dikalibrasi secara rutin yang mengacu pada aturan Metrologi Legal yang sering disebut sebagai tera/tera ulang[2].
Gambar 1 TUTSIT[3]
Salah satu cara yang digunakan untuk menguji penunjukan volume TUTSIT dalam tera/tera ulang adalah cara geometrik. Cara ini melibatkan minimal dua orang yang menggunakan alat ukur untuk mengukur dimensi TUTSIT semisal keliling lingkaran, tinggi tangki serta koreksi benda-benda atau bagian-bagian yang ada di dalam tangki untuk menentukan volume Tangki yang sebenarnya. Penentuan volume tangki menggunakan metode ini dilakukan dengan pengukuran dimensi tangki bagian luar untuk menentukan volume tangki bagian dalam. Beberapa alat yang sering digunakan dalam cara ini adalah meteran untuk mengukur lingkaran luar TUTSIT, ban ukur untuk mengukur tinggi TUTSIT, Teodolit atau Total Station untuk menentukan dimensi TUTSIT.Dimensi yang dimaksud adalah keliling, selisih jari-jari, tinggi, dan tebal plat TUTSIT.Khusus dalam menentukan keliling dan selisih jari-jari TUTSIT, proses pengukuran tersebut banyak dilakukan di luar TUTSIT dan pencatatan bersifat manual.
Dengan menggunakan teknik geometrik namun berbeda pendekatan, sebuah prototipe alat ukur pernah dibuat oleh Irwanto dan Utamipada tahun 2016 untuk mensimulasikan alat yang dapat mengukur dimensi dalam sebuah tangki silinder. Dimensi yang dimaksud adalah jari-jari dan luas lingkaran dalam sebuah silinder tegak ideal yang dianggap mewakili sebuah TUTSIT.Dengan menggunakan pendekatan segi banyak, jari-jari tersebut diukur pada empat titik yang berbeda dimana sensor berada di pusat silinder. Alat tersebut dibuat menggunakan sensor ultrasonik berbasis mikrokontroler serta menggunakan motor dan potensiometer dalam membantu pergerakan memutar dari sensor ketika melakukan pengukuran jari-jari lingkaran. Simulasi tangki yang digunakan pada penelitian tersebut menggunakan sebuah benda berbentuk silinder dengan diameter alas berukuran 13 cm[4].
Dari uraian tersebut, menarik untuk dilakukan tiga pengembangan pada prototipe tersebut. Pengembangan yang pertama adalah metode pendekatan segi banyak pada pengukuran jari-jari lingkaran dilakukan pada delapan titik yang berbeda. Pengembangan yang kedua adalah bagaimana prototipe dapat berputar sendiri dalam melakukan pengukuran sehingga dapat mengefisienkan waktu pengukuran. Pengembangan yang terakhir adalah dalam penggunaan silinder ideal yang dijadikan simulasi diperbesar diameternya menjadi 30 cm.
Berdasarkan hal tersebut, tulisan ini akan membahas mengenai prototipe alat ukur yang dapat mengukur jarijari dan luas lingkaran dalam tangki ukur tegak berbentuk silinder menggunakan sensor ultrasonik berbasis mikrokontroler Arduino.
2 Tinjauan Pustaka
a. TUTSIT wajib di tera-tera ulang
Berdasarkan peraturan Menteri Perdagangan no 67 tahun 2018, alat ukur, takar, timbang dan perlengkapannya yang wajib ditera-tera ulang adalah alat ukur yang digunakan dalam transaksi perdagangan untuk mengukur, menakar, atau menimbang untuk kepentingan umum, usaha, menyerahkan atau menerima barang, menentukan pungutan atau upah, menentukan produk akhir dalam perusahaan, dan/atau melaksanakan peraturan perundang-undangan[2]. Salah satu contoh alat ukur takar yang wajib di tera-tera ulang adalah TUTSIT. Hal ini dikarenakan TUTSIT digunakan dalam transaksi perdagangan untuk menakar cairan-cairan tertentu yang diatur dalam peraturan perundang-undangan.
b. Sensor Ultrasonik
Sensor ultrasonik memiliki bentuk dan cara kerja seperti yang ditunjukkan oleh Gambar 2.1 di bawah ini. Sensor tersebut memiliki bagian penembak gelombang ultrasonik (triggeratau transmitter) dan penerima gelombang (echoatau receiver). Sensor ini mengukur jaraknya terhadap suatu objek ukur berdasarkan perkalian antara kecepatan gelombang dan setengah waktu tempuh gelombang tersebut kembali ke sensor (diterima oleh bagian echo) setelah menumbuk objek ukur tersebut. Umumnya sensor ultrasonic yang digunakan dalam penelitian ini, berjenis HC-SR04, bekerja berdasarkan prinsip piezoelektrik. Hal ini dikarenakan baik bagian transmitter maupun receiver dibuat dari bahan yang memiliki sifat piezoelektrik.Ketika sensor diberikan tegangan maka bahan piezoelektrik pada bagian transmitter akan membuat bahan piezoelektrik berdeformasi atau mengalami getaran mekanik. Getaran tersebut berupa suara berfrekuensi tinggi (ultrasonik)akan dikirim sebagai sinyal trigger melalui media pengiriman (udara) hingga menumbuk suatu objek yang kemudian dipantulkan. Pantulan sinyal tersebut yang kemudian disebut sinyal echo akan diterima oleh bagian receiver. Pada bagian receiver ini, bahan piezoelektrik akan mengubah sinyal mekanik tersebut menjadi sinyal-sinyal listrik. Sinyal-sinyal listrik inilah yang akan dikirimkan ke bagian pengolah sinyal untuk digunakan dalam menghitung jarak yang dibaca oleh sensor.
Gambar 2.1(a) Sensor Ultrasonik HC-SR04[5] (b)Cara kerja sensor ultrasonik[6]

c. Penelitian terdahulu
Penelitian mengenai prototipe alat ukur luas penampang melintang atau lingkaran dalam dari sebuah silinder tegak yang mensimulasikan sebuah TUTSIT pernah dilakukan oleh Irwanto dan Utami pada tahun 2016[4]. Prototipe tersebut menggunakan komponen inti berupa mikrokontroler Arduino Uno, serta sensor ultrasonik berjenis HC-SR04 yang bergerak dengan bantuan motor dan potensiometer. Fungsi potensiometer pada prototipe ini adalah untuk menggerakan motor sehingga bergerak memutar sebesar sudut yang diinginkan. Prototipe tersebut dapat mengukur luas penampang lingkaran dalamsuatu silinder berdiameter 13 cm dengan menggunakan pendekatan segi banyak dimana jari-jari dari lingkaran yang diukur dilakukan di empat titik yang berbeda, yaitu 00, 900, 1800, dan 2700.Kelemahan dari penelitian tersebut adalah dalam proses pengukuran masih terdapat campur tangan operator dalam mengukur jari-jari pada ke empat titik tersebut karena penggunaan potensiometer. Selain itu, alas silinder yang berupa lingkaran akan lebih akurat jika jarijarinya diukur lebih dari empat titik. Oleh karena itu, pada penelitian ini prototipe tersebut akan dikembangkan metode pendekatan pengukuran jari-jari lingkarannya menjadi delapan titik, yaitu pada sudut 00, 450, 900, 1350, 1800, 2150, 2700,dan3150 dan 2700 serta proses pengukuran dilakukan secara otomatis.
3 Metode Penelitian
a. Spesifikasi prototipe dan objek ukur
Spesifikasi yang dijadikan acuan dalam membuat prototipe dan objek ukur terdiri dari 8 unsur. Kedelapan unsur tersebut adalah:
- 1) Sensor yang digunakan untuk mengukur jari-jari silinder adalah sensor ultrasonik HCSR04 dengan rentang pembacaan 2–400 cm.
- 2) Mikrokontroler yang digunakan adalah Arduino Mega 2560.
- 3) Prototipe memiliki daya baca atau resolusi sebesar 1 cm.
- 4) Prototipe dapat mengukur jarak dari sensor ke delapan titik tujuan secara bergantian yang dilakukan dengan berputar.
- 5) Delapan titik pada dinding silinder yang diukur jaraknya dari titik pusat silinder dibuat berdasarkan pada selisih sudut antara satu titik ke titik lainnya yang berdekatan dari titik awal sebesar 450.
- 6) Objek ukur adalah berupa silinder tegak berbahan akrilik dengan tebal 3 mm, diameter 30 cm dan tinggi 30 cm.
- 7) Suhu dan Kelembaban diabaikan pengaruhnya pada hasil penunjukan prototipe.
- 8) Alat bantu dalam pembuatan objek ukur semisal penggaris, dan busur derajat sudah dikalibrasi di Direktorat Metrologi, Bandung.
b. Rancang Bangun Prototipe
Prototipe dirancang dan dibangun mengikuti diagram blok pada Gambar 3.1.(a) dan komponen penyusunnya berupa perangkat keras dirangkai seperti yang ditunjukkan oleh Gambar 3.1.(b) di bawah ini. Diagram blok pada Gambar 3.1.(a) menjelaskan proses kerja prototipe dalam melakukan pengukuran. Prototipe memperoleh input yang berasal dari sensor ultrasonik HCSR04, sensor DHT 11, RTC DS1302, push button ON/OFF dan push button reset. Sensor DHT 11 memberikan input berupa suhu (0C) dan kelembaban (%). Kedua input tersebut penting diperhatikan dalam melakukan kalibrasi atau tera/tera ulang TUTSIT dikarenakan dapat mempengaruhi hasil pengukuran jari-jari lingkaran dalam TUTSIT dimana TUTSIT dibuat dari bahan logam yang dapat melengkung pada suhu atau kelembaban tertentu. Namun demikian, pengaruh dari kedua faktor tersebut diabaikan dalam penilitian ini. Sensor ultrasonik memberikan input berupa jarak antar sensor dengan objek ukur (cm). Modul RTC DS1302 memberikan input berupa tanggal dan waktu pengukuran. Adapun push button memberikan input berupa perintah menyala (ON) atau matinya (OFF) prototipe. Ketika prototipe ON maka melalui modul driver ULN2003, motor stepper akan bergerak memutar bersamaan dengan sensor ultrasonik yang dipasangkan di atas motor tersebut. Artinya, proses pengukuran akan berjalan. Sebaliknya, pada saat prototipe OFF maka prototipe akan berada pada kondisi mati dan proses pengukuran akan berhenti. Mikrokontroler berupa Arduino Mega 2560 akan menerima, mengolah, dan mengontrol sinyal-sinyal input tersebut untuk kemudian akan mengirimkan outputnya berupa teks berformat TXT oleh modul MicroSD Adapter dan teks dalam tampilan digital oleh modul LCD 20x4. Power supplyyang digunakan untuk memberi daya pada prototipe ini berasal dari adaptor 12V DC. Untuk mengulang proses pengukuran dari awal tanpa mematikan prototipe dapat menggunakan push button reset.
Gambar 3.1 (a)Diagram Blok Prototipe(b)Rangkaian Prototipe
c. Perancangan objek ukur
Untuk mempermudah mengetahui akurasi prototipe alat ukur yang akan dibuat, objek ukur yang mewakili TUTSIT haruslah diketahui ukurannya. Oleh karena itu, dibuat silinder tegak berbahan akrilik dengan tebal 3 mm, diameter dalam 30 cm dengan tinggi 30 cm. Silinder tersebut dapat dilihat seperti pada Gambar 3.2.(a). Selain itu, dibuat pula sebuah lingkaran akrilik yang diberi tanda sebagai patokan titik ukur sebanyak delapan titik. Kedelapan titik pada sisi lingkaran dihubungkan dengan titik pusat lingkaran sehingga membentuk sebuah juring. Masing-masing juring memiliki sudut sebesar 450(lihat Gambar 3.2.(b)).Kedelapan titik tersebut adalah titik di 00,450, 900, 1350, 1800, 2250, 2700, dan 3150. Lingkaran ini digunakan dengan cara meletakkannya sebagai alas di dalam silinder tegak dan tepat di bawah sensor ultrasonik. Fungsi dari lingkaran ini adalah untuk memvalidasi putaran sensor agar semua titik yang diinginkan dapat diukur. Selain itu, kedelapan titik pada lingkaran tersebut memberikan panduan bahwa lingkaran dipecah menjadi delapan bagian yang berupa juring. Dengan menggunakan konsep luas lingkaran maka dapat ditentukan bahwa luas masing-masing juring adalah 1/8 luas lingkaran. Dengan demikian, luas total lingkaran adalah 8 kali luas juring. Hal ini berarti dalam proses penentuan luas lingkaran dalam silinder, ultrasonik hanya akan mengukur jarak dari titik pusat O ke sisi/dinding silinder berupa jari-jari dalam satuan sentimeter (cm) untuk selanjutnya ditentukan kedelapan luas juring yang akan dijumlahkan untuk memperoleh luas lingkaran.
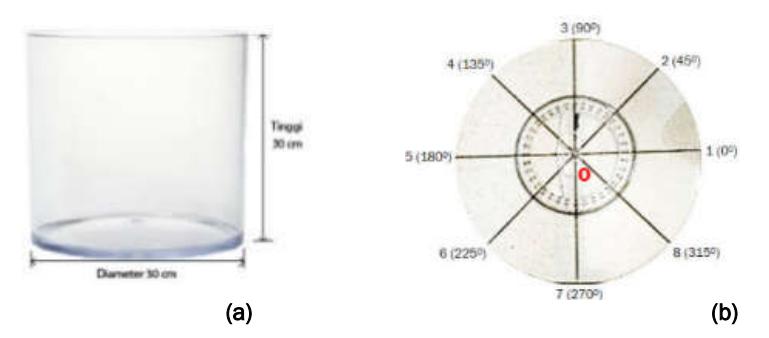
Gambar 3.2.(a) Silinder tegak berbahan akrilik (b)Alas silinder tegak
4 Hasil dan Pembahasan
Hasil dan pembahasan rancang bangun prototipe dan objek ukur dapat dibahas dalam tiga tahapan. Tahap pertama dari sisi hardware. Tahap kedua dari sisi software. Akhirnya, tahap ketiga dari sisi hasil pengukuran.
a. Prototipe dan objek ukur dari sisi hardware
Secara hardware, hasil dari perancangan prototipe alat ukur dan objek ukur dapat dilihat pada Gambar 4.1. Gambar tersebut menunjukkan prototipe alat ukur terbagi dalam dua bagian utama yaitu bagian pengukur dan bagian kontrol serta display (penampil) penunjukan sensor. Bagian pengukur terdiri dari bagian pengukur jarak dan bagian pengukur suhu dan kelembaban. Bagian ini diletakkan di dalam objek ukur. Bagian pengukur jarak terdiri dari sensor ultrasonik yang disangga menggunakan sebuah penyangga alumunium yang berfungsi
juga sebagai poros. Penyangga tersebut dihubungkan ke sebuah pinion gear. Pinion gear dihubungkan dengan sebuah pinion gear lainnya yang terhubung ke motor stepper agar sensor dapat bergerak memutar. Pinion gear tersebut bersamaan dengan slip ring berfungsi untuk menjaga agar kabel-kabel konektor yang terhubung antar sensor ultrasonik dan Arduino Mega tidak terlilit. Untuk memudahkan poros berputar secara stabil, selain menggunakan pinion gear juga digunakan bearing block. Bagian pengukur suhu dan kelembaban merupakan sensor DHT 11 yang dihubungkan langsung ke bagian kontrol dalam hal ini ke Arduino Mega 2560. Untuk bagian kontrol, komponen-komponen penyusunnya terdiri dari Arduino Mega 2560, push button, RTC DS1320, MicroSD Adapter, dan LCD 20x4. Komponen-komponen tersebutdisimpan dalam sebuah kotak sedemikian sehingga yang terlihat dari luar hanyalah kabel-kabel konektor, bagian penampil data oleh LCD 20x4, bagian kontrol oleh tombol ON/OFF dan tombol reset. Tombol ON/OFF berfungsi untuk menghidupkan atau mematikan prototipe sedangkan tombol reset berguna untuk mengatur ulang kondisi pengukuran dari awal. Bagian kontrol dan display ini diletakkan di luar objek ukur. Adapun objek ukur terdiri dari dua bagian yaitu silinder tegak berbahan akrilik dengan diameter 30 cm dan tinggi 30 cm serta lingkaran akrilik dengan diameter yang sama dengan alas silinder. Lingkaran akrilik tersebut diletakkan di dalam silinder dan diberi tanda garis yang menghubungkan titik tengah ke sisi silinder sebagai penanda delapan buah titik yang akan diukur jari-jarinya oleh prototipe yang telah dibuat.
Gambar 4.1Prototipe alat ukur (a dan b) dan objek ukur (c)
Pada penelitian ini, lingkaran dalam silinder dianggap memiliki diameter 30 cm. Hal ini didasarkan pada dua faktor. Faktor yang pertama adalah lingkaran alas bergaris yang berdiameter sebesar 29,97 cm dapat diletakkan dengan mudah ke dalam tangki yang dibuat oleh pabrikan pembuat silinder akrilik yang mengklaim diameternya 30 cm. Lingkaran tersebut telah diukur dimensinya menggunakan Coordinate Measuring Machine (CMM) di Direktorat Metrologi, Bandung. Faktor yang kedua adalah resolusi sensor ultrasonik adalah 1 cm sehingga walaupun ada selisih jarak pada beberapa titik antara lingkaran alas dengan dinding yang sejajar dengan lingkaran tersebut masih kurang dari 0,5 cm. Artinya, selisih jarak tersebut dapat diabaikan. Adapun garis-garis yang melintang pada lingkaran tersebut dimana masing-masing juringnya bersudut 450 telah dibuat menggunakan penggaris dan busur derajat yang sudah dikalibrasi.
b. Hasil Prototipe dari sisi software
Secara software, Arduino Mega 2560 diisi dengan program yang dibuat menggunakan software Arduino IDE versi 1.82 agar prototipe alat ukur tersebut dapat berfungsi sebagaimana mestinya. Program tersebut membuat semua komponen penyusun prototipe dapat berfungsi seperti yang dijelaskan pada bab 3. Ketika tombol ON/OFF pada prototipe ditekan sehingga berada pada kondisi ON maka Arduino akan memerintahkan motor stepper untuk bergerak memutar secara otomatis sebesar 450 dan berhenti sejenak agar sensor ultrasonik dapat mengukur jarak antara sensor dengan dinding silinder tegak. Selain itu, sensor DHT11 akan mengukur suhu dan kelembaban lingkungan serta RTC DS1302 akan memberikan input waktu dan tanggal. Hasil dari ketiga komponen tersebut berupa penunjukan tanggal dan waktu, suhu dan kelembaban, serta jarijari dan luas lingkaran. Data tersebut akan diolah oleh Arduino Mega untuk ditampilkan pada layar LCD (lihat Gambar 4.2) dalam bentuk tampilan digital dan disimpan dalam format .TXT di MicroSD. Motor Stepper akan berhenti berputar jika Tombol ON/OFF ditekan sehingga berada pada kondisi OFF. Untuk tombol reset, hasil yang diperoleh adalah proses pengukuran akan dimulai dari awal dan membuat tampilan LCD kembali seperti ketika awal mula dihidupkan. Selain itu juga, tombol reset ini membuat data pengukuran yang diambil dimulai dari sudut 00. Akan tetapi, motor tidak kembali pada posisi semula sehingga posisi motor ketika tombol reset ditekan maka posisi tersebut dianggap sebagai posisi dengan sudut 00.
Gambar 4.2Tampilan layar LCD ketika prototipe berfungsi
c. Hasil Prototipe dari sisi karakteristik pengukuran
Gambar 4.3(a) Ilustrasi pengujian daerah ukur pembacaan sensor ultrasonic (b) posisi sensor yang dipasang secara horizontal (c) posisi sensor yang dipasang secara vertikal
Sebelum digunakan untuk mengukur jari-jari dan luas lingkaran dalam silinder tegak, prototipe yang telah dibuat diuji karakteristiknya. Karakteristik yang diuji adalah pengujian daerah ukur dan penunjukannyasensornya.Pengujian daerah ukur dapat diilustrasikan seperti pada Gambar 4.3.(a). Sensor ultrasonik yang dipasang secara horizontal(Gambar 4.3.(b))atau vertikal(Gambar 4.3.(c))di atas motor stepper berada pada jarak BC dari objek ukur PQRS. Jarak BC sama dengan jarak AD, EG, dan FH yang diukur menggunakan penggaris dan berbeda-beda besarnyatergantung pengujiannya. Pengujian yang dimaksud dilakukan di empat titik, yaitu 25 cm, 50 cm, 75 cm, dan 100 cm. Titik F merupakan posisi titik tengah antara transmitter dan receiver dari sensor ultrasonik. Posisi sensor dibuat sedemikian rupa sehingga besar jarak FH dan BC adalah sama. Daerah ukur pada sumbu-x di sebelah kiri dapat diperoleh dengan cara menambahkan objek ukur lainnya, sebut saja objek pengganggu sepertibenda OP1 dan OP2yang memiliki ketebalan lebih dari 1 cm di depan objek ukur PQRS. Kedua objekpengganggu tersebut yang berada di depan objek ukur tersebut kemudian digeser posisinya secara bertahap sehingga penunjukan sensor dalam membaca jarak BC menjadi berubah. Secara horizontal atau berdasarkan sumbu-x, jarak maksimal sehingga penunjukan sensor tidak berubah dari yang seharusnya ditunjukkan oleh nilai a. Nilai a ini sama-sama dimiliki oleh segmen LO, MH, dan IG, OK, HN, dan GJ. Untuk daerah ukur berdasarkan sumbu-y atau vertical, nilai maksimal jarak ukur sensor ultrasonik dari titik tengahnya H ditunjukkan oleh nilai b. Nilai ini sama-sama dimiliki oleh segmen KN, KJ, OH, HG, LM, dan MI. Nilai a dan b untuk empat jarak yang berbeda-beda dapat dilihat pada Tabel 4.1 di bawah ini. Nilai tersebut diperoleh pada suhu dan kelembaban pengujian rata-rata 28oC dan 65%.
Tabel 4. 1 Data daerah ukur sensorultrasonik
| Jarak Objek Ukur | |||||
|---|---|---|---|---|---|
| pemasangan ultrasonik | Daerah ukur di sumbu | 25 cm | 50 cm | 75 cm | 100 cm |
| Horizontal | x (cm) | 3 | 4 | 5 | 6 |
| y (cm) | 2 | 3 | 5 | 6 | |
| Vertikal | x (cm) | 3 | 4 | 5 | 6 |
| y (cm) | 2 | 4 | 5 | 6 | |
Berdasarkan Tabel 4.1, lebar jarak x dan tinggi y semakin membesar seiring bertambahnya jarak antara sensor ultrasonik dengan objek ukur. Secara umum, baik sensor ultrasonik yang dipasang secara horizontal dan vertical serta berjarak 25 cm dari objek ukur, daerah ukur sensornya adalah sebesar 6 cm untuk lebarnya dan 4 cm untuk tingginya. Untuk jarak 50 cm, lebar daerah ukur sensornya adalah 8 cm sedangkan lebarnya 6 cm untuk horizontal dan 8 cm untuk vertical. Untuk jarak 75 cm, lebar dan tinggi daerah ukur sensornya adalah sama-sama sebesar 10 cm. Adapun untuk jarak 100 cm, lebar daerah ukur sensornya adalah samasama sebesar 12 cm.
Pengujian penunjukan sensor ultrasonik dilakukan dengan dua tahapan. Pada setiap tahapan, pengambilan data dilakukan sebanyak lima kali. Tahapan yang pertama adalah pengukuran jarak pada titik yang berbeda ketika sensor tidak bergerak. Pada bagian ini, pengukuran dilakukan dua kali yaitu ketika sensor dipasang secara vertical dan horizontal. Selain itu, pengukuran dilakukan dengan nilai jarak yang bertambah (naik) yang dimulai dari jarak 0 cm hingga jarak 100 cm. Kemudian, pengukuran dilakukan sebaliknya dimulai dari jarak 100 cm menuju 0 cm untuk melihat histerisisnya. Untuk setiap pengujian tersebut, suhu dan kelembaban pengujian rata-ratanya adalah 28oC dan 65%. Adapun hasil pengujiannya dapat dilihat pada Gambar 4.4. Berdasarkan grafik tersebut, baik sensor dipasang secara vertical ataupun horizontal, penunjukan prototipe pada masing-masing titik uji (0 cm, 10 cm, 20 cm, 30 cm, 40 cm, 50 cm, 60 cm, 70 cm, 80 cm, 90 cm, dan 100 cm) memberikan hasil yang sama baik untuk pembacaan jarak yang menaik dan menurun. Penyimpangan penunjukan terhadap titik acuan (penggaris) terjadi pada titik 0 cm, 80 cm, 90 cm, dan 100 cm dengan besar kesalahan masing-masing adalah 2, -1, -1, dan -1. Selain titik-titik tersebut, prototipe memberikan penunjukan jarak yang sesuai dengan titik acuan. Oleh karena itu, data yang dimiliki tidak menunjukkan grafik linear ideal melainkan mendekati grafik linear dengan persamaan y = 0,98 x + 0,9091 dan nilai R2 sebesar0,99 atau 99,98%.

Gambar 4.4 Grafik penunjukan prototipe pada jarak yang berbeda
Untuk pengukuran pada tahapan yang kedua dilakukan setelah sensor berputar mengikuti sistem mekanik motor. Hasilnya dapat dilihat pada Tabel 4.2. Pada pengujian ini pengambilan data dilakukan sebanyak tiga kali baik ketika sensor dipasang secara horizontal maupun secara vertikal. Ilustrasi sudut acuan yang digunakan pada pengujian ini seperti yang ditampilkan oleh Gambar 3.2.(b). Pada setiap titik diletakkan suatu objek ukur pada jarak 25 cm dan 50 cm. Berdasarkan tabel tersebut, putaran sensor mengikuti besar sudut acuan yang telah ditentukan. Selain itu, pada setiap titik dengan jarak 25 cm dan 50 cm, hasil pengukuran prototipe dengan kedua jarak tersebut di setiap titik memberikan hasil yang sama dengan titik pengujian.
Tabel 4.2Pengujian Sudut Putar Motor Stepper
| Vertikal | Horizontal | ||||
|---|---|---|---|---|---|
| Titik Pengujian (cm) | Titik Pengujian (cm) | ||||
| Sudut uji (0) | 25 | 50 | 25 | 50 | |
| 0 | 25 | 50 | 25 | 50 | |
| 45 | 25 | 50 | 25 | 50 | |
| 90 | 25 | 50 | 25 | 50 | |
| 135 | 25 | 50 | 25 | 50 | |
| 180 | 25 | 50 | 25 | 50 | |
| 225 | 25 | 50 | 25 | 50 | |
| 270 | 25 | 50 | 25 | 50 | |
| 315 | 25 | 50 | 25 | 50 | |
| 360 | 25 | 50 | 25 | 50 | |
d. Hasil Prototipe dari sisi pengukuran objek ukur
Proses pengukuran objek ukur dilakukan dengan memperhatikan beberapa kriteria baik terhadap objek ukur, prototipe, serta metode ukur yang digunakan. Kriteria yang diperhatikan pada objek ukur adalah pembatasan dimensi objek ukur yang digunakan. Silinder tersebut dianggap memiliki diameter dalam ideal 30 cm dan berlaku di setiap ketinggian, mulai dari alas hingga atap silinder. Dengan demikian, luas penampang melintang lingkaran akrilik yang sebenarnya adalah 707,14 cm2. Hal ini dikarenakan lingkaran akrilik yang telah diukur menggunakan CMM dan diletakkan di dalam silinder sebagai alas memiliki diameter rata-rata 29,97 cm. Jika dilihat dibeberapa titik serta diukur menggunakan penggaris, perbedaan alas silinder ataupun lingkaran atap silinder tegak dengan lingkaran akrilik sebesar kurang lebih 1-2 mm. Selain itu, sensor ultrasonik memiliki resolusi sebesar 1 cm sehingga selisih diameter lingkaran dengan alas atau dinding akrilik bisa diabaikan.
Pada sisi prototipe, pemasangan sensor ultrasonik pada motor stepper dapat mempengaruhi hasil pengukuran. Oleh karena itu, pengukuran luas lingkaran dalam silinder dilakukan ketika sensor dipasang secara vertical dan horizontal pada ultrasonik. Pada kondisi vertical, pemasangan yang dimaksud berarti komponen echo dan trigger berada pada posisi sejajar secara vertical. Untuk pemasangan sensor secara horizontal, hal tersebut berarti komponen echo dan trigger berada pada posisi sejajar secara horizontal.
Untuk metode yang digunakan dalam pengukuran, terdapat tiga aspek yang diperhatikan. Aspek yang pertama adalah posisi ketinggian sensor ultrasonik dari alas silinder dalam. Posisi ketinggian yang digunakan adalah pada ketinggian 15 cm dan 21 cm. Aspek yang kedua adalah jumlah titik pada sisi dalam silinder yang diukur jaraknya dari titik tengah silinder. Jumlah titik tersebut terdiri dari delapan titik yang ditentukan berdasarkan besar sudut terhadap posisi awal. Titik-titik tersebut adalah titik di 00,450, 900, 1350, 1800, 2250, 2700,dan 3150. Aspek yang ketiga adalah penentuan titik nol pembacaan jarak akibat posisi sensor. Dikarenakan posisi sensor tidak menempel pada alas lingkaran yang memiliki tanda titik tengah sehingga penentuan titik nol dilakukan dengan cara coba-coba dengan menambahkan koreksi tetap sebesar 1,4 cm. Koreksi tersebut diperoleh dengan cara mengukur panjang sensor dari titik nol yang diinginkan.
Hasil pengukuran jari-jari dan luas lingkaran dalam silinder dapat dilihat pada Tabel 4.3. Hasil pengukuran tersebut diperoleh ketika sensor ultrasonik dipasang baik secara vertical maupun horizontal dan diletakkan di tengah-tengah silinder pada ketinggian 15 cm dari alas silinder dan pada ketinggian 21 cm. Selain itu, suhu dan kelembaban pengujian rata-ratanya adalah 28oC dan 65%. Pembacaan jari-jari pada setiap pengujian ditambahkan nilai koreksi sebesar 1,4 cm. Nilai koreksi tersebut merupakan nilai kompensasi peletakkan sensor dan motor agar berada sejajar dengan di titik tengah alas silinder. Pada pengujian pertama, hasil ratarata pembacaan jari-jari pada kedelapan titik adalah 14,4 cm. Adapun total luas juring yang merupakan luas lingkaran dalam adalah 651,70 cm2. Setelah dibandingkan dengan luas sebenarnya sebesar 707,14 cm2, kesalahan pembacaan luas lingkaran dalam oleh prototipe adalah sebesar -55,44 cm2. Secara keseluruhan dari 10 kali pengujian, penunjukan rata-rata di prototipe untuk jari-jari lingkaran dalam silinder adalah sebesar 14,4 cm. Untuk luas lingkaran dalam rata-rata penunjukannya adalah sebesar 651,70 cm2. Dengan demikian, rata-rata kesalahan penunjukan luas lingkaran dalam prototipe adalah sebesar -55,44 cm2. Hal ini menyebabkan penunjukan prototipe untuk luas lingkaran dalam silinder memiliki standar deviasi sebesar 0 cm2,bias sebesar 55,44 cm2, persentase kesalahan sebesar -7,84 %, dan nilai presisi sebesar 100%.
Tabel 4.3 Pembacaan jari-jari dan luas lingkaran dari sensor pada ketinggian 15 cm dan 21 cm
| Pengujian | Di ketinggian 15 cm | Di ketinggian 21 cm | Luas Sebenarnya | Error | ||
|---|---|---|---|---|---|---|
| ke- | Jari-jari (cm) | Luas Lingkaran (cm²) | Jari-jari (cm) | Luas Lingkaran (cm²) | (cm²) | (cm2) |
| 1 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 2 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 3 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 4 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 5 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 6 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 7 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 8 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 9 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| 10 | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| Rata-Rata | 14,4 | 651.70 | 14,4 | 651.70 | 707.14 | -55.44 |
| Standar Deviasi (cm2) Kesalahan (%) | 0 | |||||
| -7.84 | ||||||
| Presisi (%) | 100 | |||||
5 Kesimpulan dan Saran
Berdasarkan penelitian yang telah dilakukan, dapat disimpulkan bahwa prototipe telah berfungsi dengan baik untuk dapat mengukur jarak suatu benda hingga sejauh 100 cm dan silinder tegak berdiameter 30 cm dengan tinggi 30 cm. Daerah ukur prototipe tersebut baik ketika sensor ultrasonik dipasang secara horizontal maupun vertical pada motor stepper memiliki besar yang hampir sama untuk lebar (x) dan tingginya (y) dan akan bertambah seiring bertambahnya jarak objek ukur dari prototipe. Untuk linearitas, hasil pembacaan jarak 0-100 cm dengan kelipatan 10 cm, persamaan linearitasnya y = 0,98 x + 0,9091 dengan nilai R2 sebesar 0,99 atau 99,98% atau bias dikatakan linear. Pada pengujian histerisis, pembacaan prototipe dengan jarak yang sama memberikan hasil yang sama seperti pada pengujian linearitas baik ketika pembacaan jarak menaik ataupun menurun.Selisih terbesar terjadi pada titik 0 cm dengan kesalahan sebesar 2 cm. Hal ini dikarenakan karakteristik pembacaan sensor pada titik tersebut akan selalu menunjukkan nilai 2 cm. Untuk pengujian pembacaan jarak prototipe ketika sensor berputar dengan kelipatan 450, pembacaan jarak prototipe sesuai dengan jarak yang ditentukan. Pengujian terakhir berupa menentukan luas lingkaran dalam silinder tegak pada ketinggian 15 cm dan 21 cm menunjukkan kesalahan sebesar -7,84% dan presisi 100%. Kesalahan tersebut dapat diakibatkan peletakan bagian pengukur dari prototipe di tengah-tengah alas silinder, resolusi ultrasonik yang terbatas pada 1 cm serta asumsi diameter ideal silinder sebesar 30 cm.
Darikesimpulanyang diperoleh, saran untuk pengembangan prototipe ini lebih lanjut adalah dengan mengatasi penyebab kesalahan prototipe ini dalam mengukur objek ukur silinder tegak.Beberapa diantaranya seperti dengan menggunakan sensor pengukur jarak yang lebih akurat, menggunakan 12 titik acuan pada dinding silinderuntuk mengukur jari-jari lingkaran dalam dan memperhatikanfaktor suhu dan kelembaban dalam
pengukuran. Dengan demikian, prototipe yang akan dikembangkan lebih lanjut dapat digunakan langsung dalam mengukur luas lingkaran dalam pada TUTSIT.
6 Referensi
- [1] Dirjen PDN, "SK Dirjen PDN No. 25 Tahun 2010 ttg TUTSIT dan Lampiran.pdf." Kementerian Perdagangan RI, Jakarta, 2010.
- [2] K. Perdagangan, "Permendag No. 67 Tahun 2018 ttg Alat UTTP yg wajib tera-tera ulang," no. 811. Kementerian Perdagangan RI, Jakarta, p. 20, 2018.
- [3] Tim Viva, "Pertamina Akhirnya Kirim BBM ke Karimunjawa," 2019. [Online]. Available: https://www.viva.co.id/berita/bisnis/1003419-pertamina-akhirnya-kirim-bbm-ke-karimunjawa.
- [4] D. Irwanto and P. T. Utami, "Pengukuran Luas Penampang Dalam Silinder Dengan Pendekatan Segi Banyak Menggunakan Sensor Ultrasonik dan Potensiometer," Institut Teknologi Bandung, 2016.
- [5] Cytron Technologies, "Product User's Manual HCSR04 Ultrasonic Sensor," no. May. pp. 1–10, 2013.
- [6] J. R. Club, "Ultrasonic Workshop," pp. 4–7, 2019.
7 Acknowledgement
Tulisan ini adalah hasil proyek akhir mahasiswa program D3 Metrologi dan Instrumentasi yang dibantu pendanaannya oleh Teknik Fisika ITB Fakultas Teknik Industri melalui Program Pendampingan Akademi Metrologi dan Instrumentasi.