
1 Pendahuluan
Bejana ukur standar (BUS) adalah standar dari alat ukur volume digunakan sebagai untuk menguji alat ukur volume lainnya. Penggunaan BUS dalam kegiatan kemetrologian contohnyaketika dilakukan pengujian tangki ukur mobil (TUM) dan pengujian BUS lainnya saat tera maupun tera ulang[1].
Proses pengisian yang dilakukan secara manual olehoperator/peneramengharuskan mereka berada di dekat valve/saklar pengontrolpengisian air. Hal itu terjadi untuk menghindari meluapnya air karena melebihi nilai manual BUS yang diisi. Namun proses manual ini menyebabkan proses pengisian menjadi tidak efisien, karena waktu yang dimiliki penera menjadi tersita untuk menunggu pengisian mencapai level tertentu.
Kontrol otomatis pengisian BUS dapat menjadi solusi dari dari permasalahan diatas. Salah satu alternatif pengukuran dan kontrol level adalah menggunakan automatic level control. Secara umum beberapa jenis sensor yang digunakan dalam automatic level controlbisa digolongkan kepada contact dan noncontact sensor[2]. Sensor yang digolongkan kedalam contact sensor diantaranya adalah kawat resistansi dan tahanan geser. Penggunaan kawat resistansi yang dicelupkan ke dalam air akan membuat sensor berkarat. Untuk tahanan geser, pengukuran dilakukan dengan menyentuhkan sensor langsung ke dalam air. Metode contact menyebabkansensor cepat menjadi rusak dan menyebabkan durabilitas sensor bermasalah. Solusi masalah ini adalah penggunaan sensor yang tidak langsung kontak dengan air. Dalam hal ini sensor ultrasonik dapat digunakan sebagai alternatif terhadap masalah sensor-sensor contact.
Penggunaan sensor ultrasonik sebagai sensor level telah digunakan dalam beberapa rancang bangun alat dan berbagai aplikasi. Pada penelitian Arief [3], sensor ultrasonik digunakan untuk pengukuran level dan volume air. Untuk pengendalian level air penelitian yang dilakukan Prihantoro dan Husni[4] dapat dijadikan rujukan, dimana pengendalian dilakukan dengan menghidupkan dan mematikan pompa pengisian air. Pada saat tangki kosong pompa akan hidup untuk mengisi air ke tangki sedangkan apabila tangki penuh atau di setpoint tertentu pompa akan dimatikan. Penelitian yang dilakukan Arifin [5], prototipe alat yang dibangunmenggunakan dua buah relay yang mengatur hidup dan matinya pompa pengisi dan pompa pengurang air di tangki kontrol.
Dibandingkan dengan pembuatan prototipe pada penelitian sebelumnya, prototipe kontrol level bejana ukur standar berbasis arduino, sensor ultrasonik, dan AC control speed motor termodifikasi ini memiliki beberapa
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 12 (1), 2020 ISSN : 2085-2517, e-ISSN: 2460-6340
perbedaan. Pertama, pembuatan prototipe ini bertujuan untuk membantu penera atau operator dalam mengisi air ke dalam Bejana Ukur Standar (BUS) sehingga proses pengisian menjadi lebih efisien dibandingkan proses manual. Kedua, digunakannya AC control speed motor termodifikasi pada proses kontrol otomatis, dimana kecepatan pompa dalam pengisian air diatur sesuai dengan level air yang terukur. Semakin tinggi level air maka kecepatan pengisian pompa menjadi semakin berkurang.
2 Rancang Bangun
2.1 Rancang Bangun Perangkat Keras
Gambar 1 Diagram blok prototipe kontrol level bejana ukur standar
Keterangan :
- 1. Simulator BUS
- 2. Sensor ultrasonik
- 3. Pipa pengisian air
- 4. Kontroller (Arduino dan AC motor speed controltermodifikasi )
- 5. Pompa air
- 6. Wadah penyimpan air
Gelas ukur 1000 ml digunakan sebagai simulator BUS dengan pertimbangan adanya skala yang bisa mengsimulasikan nilai nominal BUS. Selain itu diameter gelas ukur 1000 ml cukup lebar untuk ditempatkan sensor dan juga pipa/selang pengisian air.
Sensor ultrasonik tipe HC-SR041 digunakan untuk mengukur ketinggian level air pada gelas ukur.Data pembacaan sensor ultrasonik ini dikirimkan ke Arduino dan diolah oleh Arduino untuk menghasilkan keputusan pengontrolan.
Pada prototipe kontrol otomatis ini debit air yang masuk pada gelas ukur akan diatur. Pengaturan debit air ini dilakukan dengan cara mengubah kecepatan motor pompa air menggunakan AC motor speed control.Secara manual AC motor speed controlmemiliki potensiometer yang berfungsi mengatur nilai kendali alat. Potensiometer sendiri memanfaatkan prinsip perubahan resistansi (Variable resistansi). Modifikasi yang dilakukan pada AC control speed motor adalah mengganti potensiometer dengan relay dan resistor (gambar 2). Potensiometer pada AC control speed motor dicopot dan diganti dengan resistor yang berjumlah empat buah dengan nilai resistansi yang berbeda-beda.
Pemilihan resistor dilakukan dengan menggunakan modul relay 4 channel. Pada masing-masing channel relay (kabel biru di gambar 2) dihubungkan ke pin digital Arduino (pin digital 2,3,4 dan 5). Untuk channel satu (kecepatan pompa maksimum) dihubungkan ke pin D5, channel empat (kecepatan 75 % maksimum) dihubungkan ke D4, channel 3 (kecepatan 25% maksimum) dihubungkan ke D3, dan channel 2 (pompa berhenti mengalirkan air ) dihubungkan ke D2. VCC dihubungkan ke Vin (kabel warna merah) dan GND dihubungkan ke ground (kabel warna hitam).
1 Range pengukuran sensor ultrasonic hc-sr04 adalah sekitar 2cm-400cm dengan akurasi sebesar 3mm[6]
Gambar2Skematik kontroler
Arduino memilih relay tertentu sesuai dengan keputusan pengontrolan.Pemilihan relay juga artinya pemilihan resistor pada modul AC control speed motor. AC control speed motor mengendalikan kecepatan putar pompa. Semakin kecil nilai resistor yang terpilih maka kecepatan putar pompa akan semakin cepat.Semakin cepat putaran pompa maka debit air akan semakin besar. Sebaliknya, semakin besar nilai resistor yang terpilih maka kecepatan putaran pompa semakin lambat.Semakin lambat putaran pompa maka debit air pun akan semakin kecil. Ketika simulator BUS kosong kecepatan pengisian debit air maksimal. Semakin mendekati setpoint kecepatan pengisian debit air berkurang dan berhenti ketika level mencapai setpoint.
2.2 Rancang Bangun Perangkat Lunak
Prototipe kontrol otomatis ini berbasiskan mikrokontroler Arduino. Salah satu kelebihan dari penggunaan arduino ini adalah fasilitas pemograman yang relatif memudahkan pengguna. Telah tersedia IDE (interface development enviroment), dapat didownload dari situs arduino.cc, yang mudah digunakan karena tampilannya yang user friendly. Bahasa yang digunakan adalah bahasa C yang relatif lebih mudah dibandingkan bahasa Assembly yang biasa digunakan dalam pengembangan perangkat lunak mikrokontroler.
Rancang bangun perangkat lunak didasarkan konsep pengontrolan relay yang sebelumnya dijelaskan pada rancang bangun perangkat keras. Apabila digambarkan dalam bentuk flowchart, proses pemilihan relay dapat dilihat pada gambar 3.
Pada saat inisiasi, keempat relay diseting dalam kondisi off. Lalu, dilakukan pengukuran jarak antara sensor ultrasonik dengan permukaan air. Jika jarak antara sensor ultrasonik dengan permukaan air lebih besar dari
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 12 (1), 2020 ISSN : 2085-2517, e-ISSN: 2460-6340
22 cm maka relay 1 dihidupkan sedangkan relay lainnya dalam kondisi offartinya kecepatan pengisian tabung dalam kondisi maksimum. Jika jarak antara sensor ultrasonik dengan permukaan air antara 11 cm sampai 22 cm maka relay 2 dihidupkan sedangkan relay lainnya dalam kondisi off artinya kecepatan pengisian tabung dalam kondisi 75%. Jika jarak antara sensor ultrasonik dengan permukaan air antara 10 cm sampai 11 cm maka relay 3 dihidupkan sedangkan relay lainnya dalam kondisi off artinya kecepatan pengisian tabung dalam kondisi 25%. Jika jarak antara sensor ultrasonik dengan permukaan air lebih kecil dari 10 cm maka relay 4 dalam kondisi on artinya pompa dalam kondisi mati.
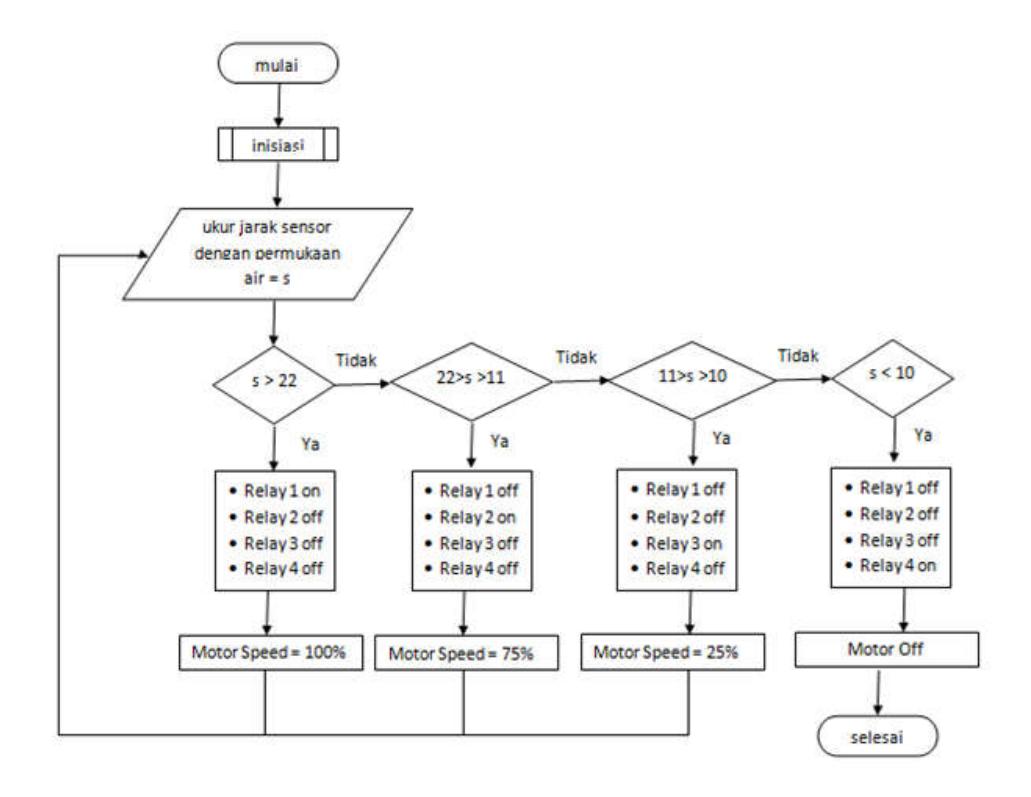
Gambar3Algoritma perangkat lunak
3 Hasil dan Pembahasan
3.1 Linieritas Sensor
Hal pertama yang diuji pada prototipe kontrol level bejana ukur standar berbasis arduino, sensor ultrasonik, dan ACcontrol speed motor termodifikasi ini adalah menguji linieritas dari sensor yang digunakan. Dilakukan kalibrasi pengukuran jarak dari sensor sampai ke pernukaan air. Dibandingkan nilai yang diukur oleh mistar sebagai nilai rujukan dan nilai yang didapatkan dari pengukuran sensor ultrasonik. Kedua hasil pengukuran mistar dan hasil pengukuran sensor ini ditampilkan seperti pada tabel 1.
Tabel 1 Pengujian linieritas sensor.
| No | Jarak | Jarak Pengujian | |
|---|---|---|---|
| Rujukan | |||
| (cm) | (cm) | ||
| 1 | 10 | 10 | |
| 2 | 12 | 12 | |
| 3 | 14 | 15 | |
| 4 | 16 | 16 | |
| 5 | 18 | 18 | |
| 6 | 20 | 20 23 | |
| 7 | 22 | ||
| 8 | 24 | 24 | |
| No | Jarak | Jarak |
|---|---|---|
| Rujukan | Pengujian | |
| (cm) | (cm) |
| 9 | 26 | 26 | |
|---|---|---|---|
| 10 | 28 | 28 | |
| 11 | 30 | 30 |
Tabel 1 Pengujian linieritas sensor (lanjutan)
| No | Jarak Jarak Pengujian | ||
| Rujukan | |||
| (cm) | (cm) | ||
| 12 | 32 | 32 | |
| 13 | 34 | 34 | |
| 14 | 36 | 36 | |
| 15 | 38 | 37 | |
| 16 | 40 | 39 | |
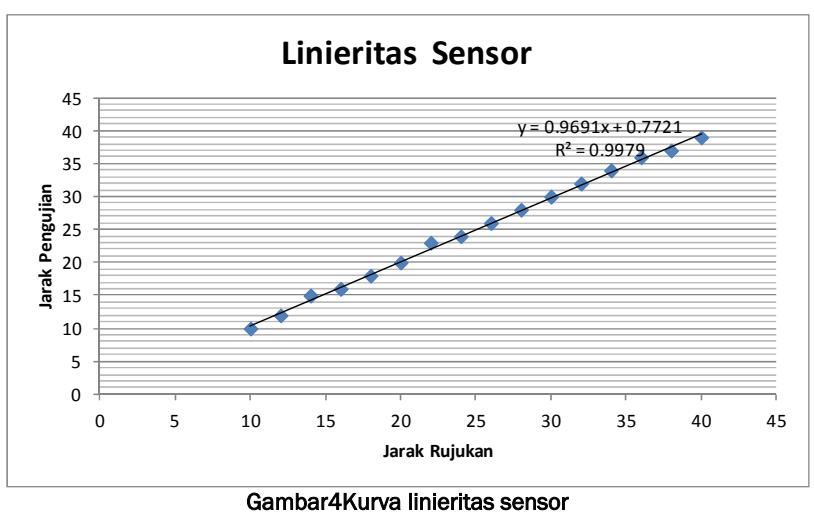
Dari hasil regresi linier seperti yang ditunjukkan pada gambar 4, terlihat bahwa terdapat hubungan linier antara jarak pengujian dengan jarak rujukannya. Ukuran linieritas ini dapat dilihat dari nilai koefisien determinan yang tinggi yaitu R2=0.99.
3.2 Kinerja Pengendalian
Kinerja pengendalian diukur dengan menghitung simpangan antara jarak permukaan air ke sensor dengan nilai setpoint. Hasil perhitungan simpangan dapat dilihat pada tabel 2. Pengujian dilakukan sebanyak lima (5) kali. berdasarkan pengujian ini simpangan rata-rata yang didapatkan adalah sebesar 0.34 cm (3,4%). Hal ini berarti nilai simpangan relatif sangat kecil.
Tabel 2Pengujian unjuk kerja pengendalian.
| Pengujian Ke | Jarak sensor ke titik 1000 ml / setpoint(cm) | Jarak hasil pengujian dari sensor ke permukaan air (cm) | Simpangan dari setpoint (cm) |
|---|---|---|---|
| 1 | 10 | 10 | 0 |
| 2 | 10 | 9,5 | +0,5 |
| 3 | 10 | 9,7 | +0,3 |
| 4 | 10 | 9,5 | +0,5 |
| 5 | 10 | 9,6 | +0,4 |
4 Kesimpulan dan Saran
Telah dibuat prototipe kontrol level bejana ukur standar berbasis arduino, sensor ultrasonik, dan AC control speed motor termodifikasi. Sensor ultrasonik yang digunakan pada prototipe ini berhubungan linier dengan jarak rujukan, dimana nilai koefisien determinansinya (R2) sebesar 0.99. Prototipe kontroler ini menunjukkan nilai simpangan rata-rata sebesar 0.34 cm (3,4%) dari setpoint, artinya kinerja pengendalian sudah baik.
Untuk penelitian lebih lanjut dapat dilakukan penelitian dengan menggunakan tabung yang berdiameter sama dengan BUS. Penelitian lebih lanjut dapat pula dilakukan langsung menggunakan BUS sebagai obyek penelitian.
5 Referensi
- [1] Dirjen PDN, syarat teknis bejana ukur standar No. 23/PDN/KEP/3 /2010, Kementerian Perdagangan, 2010.
- [2] Baek, J.H. and Ahn, K.S. Non-contact type water level control apparatus, US Patent Application Publication, 2009.
- [3] Arief,U.M., Pengujian sensor ultrasonik ping untuk pengukuran level ketinggian dan volume air, J. Ilm. Elektr. Enj. UNHAS, vol. 9, no. 2, 2011.
- [4] Prihantoro, T.B. and Husni, R.C.W., Alat Pendeteksi Tinggi Permukaan Air Secara Otomatis Pada Bak Penampungan Air Mengunakan Sensor Ultrasonik Berbasis Mikrokontroler, Skipsi, AMIK GI MDP, 2011.
- [5] Arifin,I. Automatic Water Level Control Berbasis Mikrocontroller Dengan Sensor Ultrasonik, PhD Thesis, Universitas Negeri Malang, 2015.
- [6] Freaks, E. Ultrasonic ranging module hc-sr04, HC-SR04 Datasheet, 2016.