
1 Pendahuluan
Indonesia merupakan negara tropis yang memiliki banyak sumber air dan tingkat kesuburan yang tinggi. Oleh karena itu, penduduk Indonesia sebagian besar memiliki mata pencaharian sebagai petani. Sampai saat ini, petani di Indonesia masih banyak menggunakan cara konvesional dalam mengolah lahannya. Sebagai contoh ialah menggunakan tenaga hewan untuk mengolah lahannya namun juga ada yang sudah menggunakan mesin traktor. Akan tetapi seiring perkembangan teknologi, tuntutan produktivitas dan efisiensi proses produksi pertanian mempengaruhi daya saing sebuah negara. Hal ini terlihat dari hasil pertanian di Indonesia kurang kompetitifnya apabila dibandingkan dengan hasil pertanian di negeri tetangga. Indonesia masih banyak mengimpor bahan pertanian yang merupakan suatu bukti kurangnya pemanfaatan teknologi untuk meningkatkan produktivitas pertanian.
Instansi pemerintah di Indonesia telah melakukan penelitian tentang traktor otonom untuk mengatasi masalah tersebut [1,2]. Traktor otonom diharapkan dapat meningkatkan produktivitas pertanian. Beberapa produsen traktor mulai menyadari pentingnya traktor otonom. Oleh karena itu, produk traktor otonom semakin berkembang pesat. Rasio penyaluran hibah traktor oleh pihak pemerintah juga terus menagalami peningkatan hingga mencapai kisaran 263% untuk roda dua dan 100% untuk roda empat pada tahun 2015 [3]. Menurut [4] traktor otonom membutuhkan keakuratan menyetir selama beroperasi untuk mengikuti lintasan agar dapat mengolah lahan dengan efektif. Akan tetapi sebagian besar pengembangan traktor otonom adalah untuk pertanian skala besar yaitu traktor empat roda [5,6,7,8,9,10]. Sedangkan mayoritas penggunaan traktor di Indonesia adalah traktor roda dua atau traktor roda differential [3]. Oleh karena itu, pada penelitian ini akan berfokus pada pengembangan traktor otonom roda differential atau otomatisasi traktor tangan.
Tujuan penelitian adalah untuk mensimulasikan pengontrolan penjejak lintasan pada traktor roda dua dengan sinyal kontrol kecepatan (v) dan kecepatan sudut (ω). Pembuatan model dirancang seperti model robot roda differential pada umumnya [11, 12,13,14,15]. Parameter kontrol dicari dengan melakukan tuning terhadap parameter gain kontrol kecepatan, gain kontrol kecepatan sudut dan jarak titik pusat ke referensi. Tuning dilakukan untuk mencari kesalahan penjejakan posisi x, y berdasarkan nilai Integral Absolute Error (IAE) seminimum mungkin. Selain itu, didalam penelitian ini juga mengajukan metode untuk membuat lintasan traktor multi segmen secara otomatis berdasarkan masukan data panjang dan lebar lahan pertanian serta jarak atau interval setiap alur.
2 Model Kinematik dan Dinamik
Sebelum mendesain pengontrolan, diperlukan pemahaman model kinematika terlebih dahulu. Pemodelan kinematika dalam koordinat dua dimensi dapat diilustrasikan pada Gambar 1 [11].
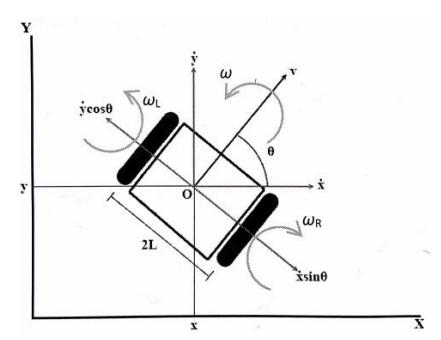
Gambar 1 Skematik robot roda differential
Konfigurasi dari platform dapat dideskripsikan kedalam tiga variabel umum \(x, y, \theta\) yang menggambarkan posisi robot. Variabel tersebut dapat dituliskan kedalam koordinat umum lagrange (q), yaitu [11]
\[q = (x, y, \theta) \tag{1}\]
Keterbatasan dalam hal gerakan adalah sifat dari nonholonomik yang dapat dituliskan seperti,
\[\dot{x}\sin\theta - y\cos\theta = 0\tag{2}\]
Adanya unsur derivative pada koordinat umum, dapat disebut dengan batasan nonholonomik. Batasan dalam bergerak secara langsung mengharuskan sifat nonholonomik melakukan gerakan memutar terlebih dahulu.
Persamaan kinematika dari robot beroda dengan mendefinisikan v dan ω yang linier dapat ditulis seperti,
\[\dot{q} = S(q) u(t) \tag{3}\]
S(q) dan u(t) ditunjukkan seperti,
\[S(q) = \begin{bmatrix} \cos \theta & 0 \\ \sin \theta & 0 \\ 0 & 1 \end{bmatrix}\] \[u(t) = \begin{bmatrix} v \\ \omega \end{bmatrix}\] (4)
\[u(t) = \begin{bmatrix} v \\ \omega \end{bmatrix} \tag{5}\]
Model robot mobil tipe penggerak differential memiliki 2 buah roda penggerak yang terpisah (kanan dan kiri). Kedua roda ini digerakkan oleh motor DC yang ditempatkan pada satu sumbu terpisah. Robot mobil tipe differential bergerak berdasarkan kecepatan putaran roda kanan dan kiri robot. Apabila kedua roda robot berputar dengan kecepatan yang sama maka robot mobil akan bergerak lurus, namun bila salah satu roda bergerak lebih lambat maka robot mobil akan bergerak dengan lintasan berbentuk kurva dengan kelengkungan menuju ke arah roda yang berputar lebih pelan. Sehingga, perlu dilakukan pengaturan kecepatan roda kiri dan roda kanan.
Pembuatan model dinamik didapatkan dari persamaan Lagrange. Sehingga energi kinetik dan energi potensial dapat dituliskan,
\[K = \frac{1}{2} \dot{q}^T M \dot{q} \tag{6}\]
M adalah matriks inersia yaitu \(M = \begin{bmatrix} m & 0 & 0 \\ 0 & m & 0 \\ 0 & 0 & I \end{bmatrix}\), m adalah massa dan I adalah momen inersia putar pada titik
(x,y). Persamaan Lagrangian ditetapkan,
\[L = K - P \tag{7}\] dengan P adalah energi potensial. Diasumsikan tidak ada gaya gravitasi yang memengaruhi gerakan maka nilai potensial bernilai nol. Maka persamaan 7 memberikan persamaan dinamik, yaitu
\[\frac{d}{dt}(\frac{\partial L}{\partial q_i}) - (\frac{\partial L}{\partial q_i}) = 0 \tag{8}\]
Sehingga model dinamik dapat ditulis menjadi,
\[MS^{T}\dot{q} + M\dot{S}^{T} + C)q = \tau_{a} + J^{T}\lambda \tag{9}\] dengan C adalah matriks kopel hasil dari diferensiasi pada persamaan 8, \(\tau_a\) adalah vektor torka input pada arah koordinat umum q, dan \(\lambda\) adalah torka halangan nonholonomik.
Sehingga untuk robot roda diferensial, kecepatan antara v dan ω dengan kecepatan roda kiri ω<sub>L</sub> dan roda kanan \(\omega_R\) memiliki hubungan:
\[v = \frac{R}{2}(\omega_R + \omega_L)\] \[\omega = \frac{R}{2L}(\omega_R - \omega_L)\] (10)
\[\omega = \frac{R}{2L} (\omega_R - \omega_L) \tag{11}\]
Apabila ditulis dalam matriks menjadi
\[\begin{bmatrix} v \\ \omega \end{bmatrix} = \frac{R}{2} \begin{bmatrix} 1 & 1 \\ 1/L & -1/L \end{bmatrix} \begin{bmatrix} \omega_R \\ \omega_L \end{bmatrix}\] (12)
Persamaan gerak roda kanan dan roda kiri dapat ditulis
\[m\dot{\omega_r} + C_R^* \omega_R = \tau_{\omega_R} \tag{14}\]
\[m\omega_L + C_L^*\omega_L = \tau_{\omega_L} \tag{15}\]
\({\rm C}^*\) <sub>L,R</sub> adalah hasil subtitusi persamaan 12 pada komponen \(\tau_{\omega_R}\) dan \(\tau_{\omega_L}\) adalah torka input pada roda kanan dan roda kiri. Persamaan 14 dan 15 adalah bentuk persamaan pengontrolan kecepatan motor dan hanya merepresentasikan gerakan roda kanan dan kiri.
3 Perancangan
3.1 Kontrol Penjejak Lintasan
Trajectory tracking atau penjejak lintasan adalah salah satu skema pengontrolan pada robot beroda untuk berada pada posisi dan waktu tertentu dengan lintasan yang diinginkan pada setiap waktu t ditentukan. Dalam hal ini diasumsikan memiliki posisi referensi dari titik O(x,y) ke titik \(B(x_b,y_b)\) dengan penetapan jarak b>0. Hubungan titik B dan O dapat ditunjukan dengan
Dengan persamaan diferensial terhadap waktu, maka
\[\begin{bmatrix} \dot{x}_b \\ \dot{y}_b \end{bmatrix} = \begin{bmatrix} \cos\theta & -b\sin\theta \\ \sin\theta & b\cos\theta \end{bmatrix} \begin{bmatrix} v \\ \omega \end{bmatrix}\] (17)
Didapat input kontrol robot v dan \(\omega\)
\[\begin{bmatrix} v \\ \omega \end{bmatrix} = \begin{bmatrix} \cos\theta & \sin\theta \\ \frac{-\sin\theta}{h} & \frac{\cos\theta}{h} \end{bmatrix} \begin{bmatrix} u_1 \\ u_2 \end{bmatrix}\] (18)
Gambar 2. Pemindahan titik referensi robot roda dua dari titik 0 ke titik B
Persamaan 17 dapat dikatakan bahwa nilai \(u_1\) dan \(u_2\) sama dengan nilai \(\dot{x_b}\) dan \(\dot{y_b}\). Maka input \(u_1\) dan \(u_2\)menggunakan algoritma pengontrol yaitu,
\[\begin{bmatrix} u_1 \\ u_2 \end{bmatrix} = \begin{bmatrix} k_{\dot{x}} \dot{x_{tr}} + k_{\dot{x}} (x_{tr} - x_b) \\ k_{\dot{y}} \dot{y_{tr}} + k_{\dot{y}} (y_{tr} - y_b) \end{bmatrix}\](19)
\(\begin{bmatrix} u_1 \\ u_2 \end{bmatrix} = \begin{bmatrix} k_{\dot{x}} \dot{x_{tr}} + k_x (x_{tr} - x_b) \\ k_{\dot{y}} \dot{y_{tr}} + k_y (y_{tr} - y_b) \end{bmatrix}\) (19) Dengan \(k_{\dot{x}}\), \(k_{\dot{y}}\), \(k_x\), \(k_y\) adalah penguat positif yaitu > 0. Dengan mensubtitusi persamaan 17 dengan persamaan \(u_1\), \(u_2 = \dot{x_h}\) dan \(\dot{y_h}\) didapat
\[\begin{bmatrix} \dot{x_b} \\ \dot{y_b} \end{bmatrix} = \begin{bmatrix} k_{\dot{x}} \dot{x_{tr}} + k_x (x_{tr} - x_b) \\ k_{\dot{y}} \dot{y_{tr}} + k_y (y_{tr} - y_b) \end{bmatrix}\](20)
Sehingga
\[\begin{bmatrix} k_{\dot{x}}(\dot{x}_{tr} - \dot{x}_b) + k_x(x_{tr} - x_b) \\ k_{\dot{y}}(\dot{y}_{tr} - \dot{y}_b) + k_y(y_{tr} - y_b) \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix}\] (21)
Nilai error dapat didefinisikan dengan vektor galat
\[\mathbf{e} = \begin{bmatrix} x_{tr} - x_b \\ y_{tr} - y_b \end{bmatrix} \tag{22}\]
Maka didapatkan dinamika error menjadi
\[\mathbf{k}_{\dot{e}}^{T} \dot{\mathbf{e}} + \mathbf{k}_{e}^{T} \mathbf{e} = 0\] \[\mathbf{k}_{\dot{e}} = \begin{bmatrix} k_{\dot{x}} \\ k_{\dot{x}} \end{bmatrix}\] (23)
\[\mathbf{k}_{e} = \begin{bmatrix} k_{y} \\ k_{y} \end{bmatrix}\] \[\mathbf{k}_{e} = \begin{bmatrix} k_{x} \\ k_{y} \end{bmatrix}\] (24)
3.2 Perancangan Segmen Lintasan
Penjejak lintasan untuk simulasi disini dibuat dengan beberapa kondisi yaitu pada arah kanan, atas, dan kiri. Karena lintasan adalah fungsi waktu maka dalam pensimulasian dapat digunakan loop. Saat mendesain lintasan dilakukan inisial kondisi terlebih dahulu yaitu koordinat posisi dan sudut posisi awal traktor, koordinat posisi awal lintasan dan panjang lintasan. Aturan-aturan loop digunakan sesuai pada Tabel 1.
Tabel 1. Aturan-aturan lintasan
| Fungsi lintasan | Arah | X | Y | ||
t(i)| Kanan | t(i)+x(1) | y(1) | | ||
t(i)| Atas | tempx | t(i)-a+y(1) | | ||
| t(i) < 2a+c | Kiri | x(1)+2a+c-t(i) | tempy | ||
| t(i)< 2a+2c | Atas | tempx | t(i)+c-2a-y(1) | ||
| t(i)< 3a+2c | Kanan | t(i)-2a-2c+x(1) | tempy | ||
| t(i)< 3a+3c | Atas | tempx | t(i)+c-3a-y(1) | ||
| t(i)< 4*a+3*c | Kiri | xt(1)+4a+3c-t(i) | tempy | ||
| t(i)<4*a+4*c | Atas | tempx | t(i)+c-4a-y(1) | ||
| t(i)<5*a+4*c | Kanan | t(i)-4a-4c+x(1) | tempy | ||
| t(i)<5*a+5*c | Atas | tempx | t(i)+c-5a-y(1) | ||
| t(i)>=5*a+5*c | Kiri | 6a+5c+x(1)-t(i) | tempy | ||
Dengan parameter-parameter tersebut dijelaskan sebagai berikut: a adalah panjang lintasan yaitu panjang lahan dikurangi 2m, 1m di setiap ujung lahan untuk gerak traktor, c adalah lebar antar lintasan dalam simulasi (6 m), tempx adalah posisi x pada segmen sebelumya, dan tempy adalah posisi y pada segmen sebelumnya.
Pembuatan lintasan otomatis untuk panjang dan lebar dapat ditunjukkan pada Gambar 3. Dengan algoritma yang dibangun, pengguna dapat memasukan besaran panjang dan lebar dari area yang akan dieksplorasi oleh traktor dan lintasan dapat terbangun secara otomatis. Gambar 4 menunjukkan graphical user interface (GUI) dari pembuatan lintasan otomatis.
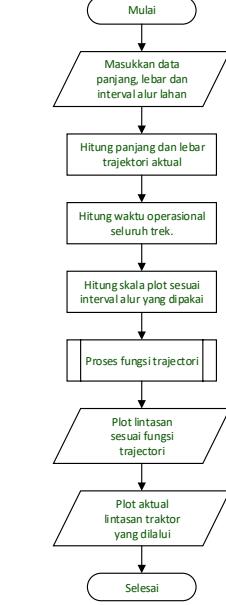
Gambar 3. Flowchart Pembuatan Lintasan Otomatis
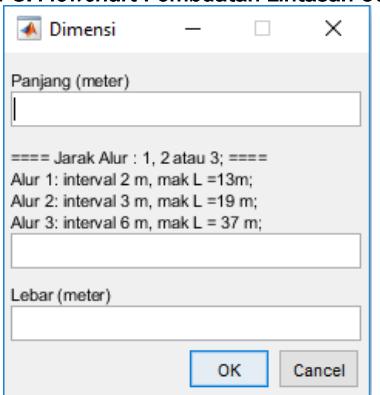
Gambar 4. Hasil Tampilan GUI Pembuatan Lintasan Otomatis
4 Hasil Simulasi dan Analisa
4.1 Pencarian parameter kontrol
Simulasi penjejak lintasan pada traktor penggerak diferensial awalnya dilakukan tuning terlebih dahulu untuk lintasan 1 segmen secara trial and error dengan rentang nilai 0.1 sampai 10. Parameter-parameter yang digunakan yaitu,
- Kv (gain kecepatan)
- Kω (gain kecepatan sudut)
- b (jarak titik pusat ke referensi)
dengan inisial kondisi posisi x, y, Ө traktor adalah 5, 1, 90o, waktu awal t = 0 detik dan waktu sampling 0,1 detik. Pencarian nilai-nilai parameter dapat dilihat Tabel 2.
Tabel 2. Hasil Tuning Parameter
| Kv | Kω | b (m) | IAE | ||
| 0,1 | 0,1 | 0,1 | 320,463 | ||
| 0,1 | 1 | 0,1 | 310,4281 | ||
| 0,1 | 10 | 0,1 | 302,402 | ||
| 1 | 0,1 | 0,1 | 1097,1794 | ||
| 1 | 1 | 0,1 | 940,2305 | ||
| 1 | 10 | 0,1 | 329,6653 | ||
| 10 | 0,1 | 0,1 | 152,8906 | ||
| 10 | 1 | 0,1 | 23,5432 | ||
| 10 | 10 | 0,1 | 9,7971 |
|---|---|---|---|
| 10 | 10 | 0,3 | 396,07 |
| 10 | 10 | 0,5 | 1.098,30 |
| 10 | 10 | 0,8 | 1.053,71 |
| 10 | 10 | 1 | 1.345,88 |
Berdasarkan hasil tuning yang telah dicoba didapatkan nilai IAE minimal 9,7971 dengan nilai-nilai parameter Kv = 10 , Kω = 10 dan b = 0,1. Dapat dilihat bahwa semakin besar nilai Kv, Kω dan semakin kecil nilai b maka nilai IAE semakin kecil.
4.2 Pengujian Lintasan Multi Segmen
Setelah mendapatkan nilai-nilai parameter terbaik dari hasil tuning pada lintasan satu segmen, maka parameter hasil tuning b, Kv dan Kω diujikan untuk lintasan multi segmen. Hasil simulasi pergerakkan posisi traktor dari titik awal menuju titik akhir dengan mengikuti lintasan yang telah dibuat ditampilkan pada Gambar 5.
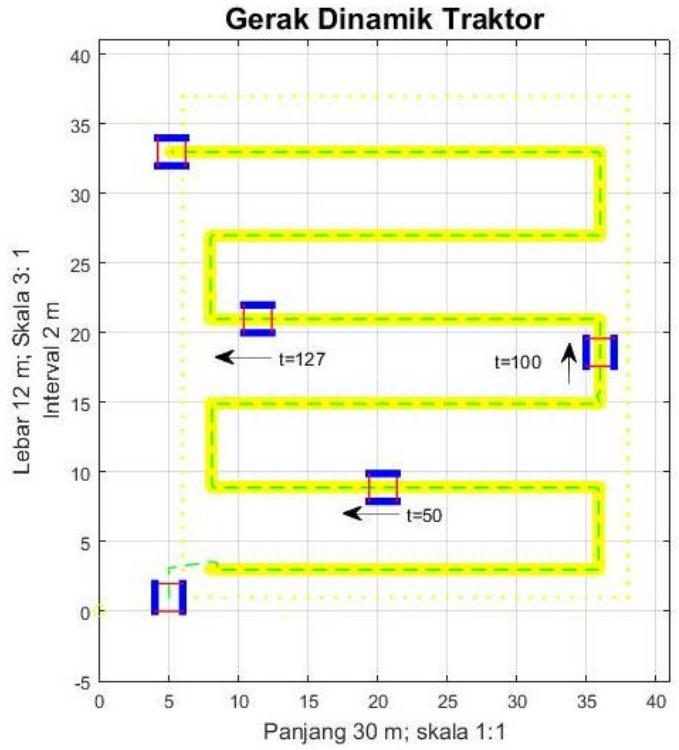
Gambar 5. Hasil Simulasi 2-D Traktor Roda Dua
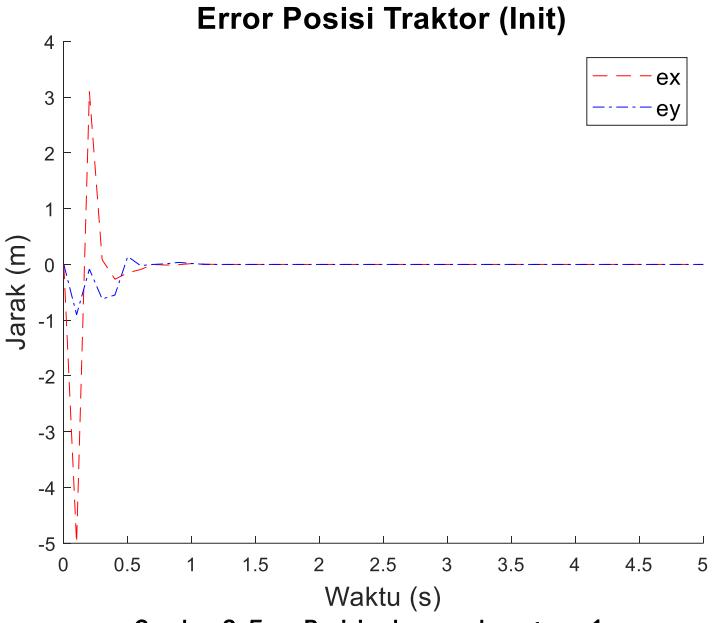
Gambar 6. Error Posisi x dan y pada segmen 1
Pada Gambar 5, garis kuning menyatakan lintasan yang dibangun untuk area dengan panjang 30 m, lebar 12 m, interval 2 m, dan garis hijau putus-putus menyatakan lintasan dari traktor. Pada Gambar 6 adalah error yang terjadi pada lintasan 1 segmen.
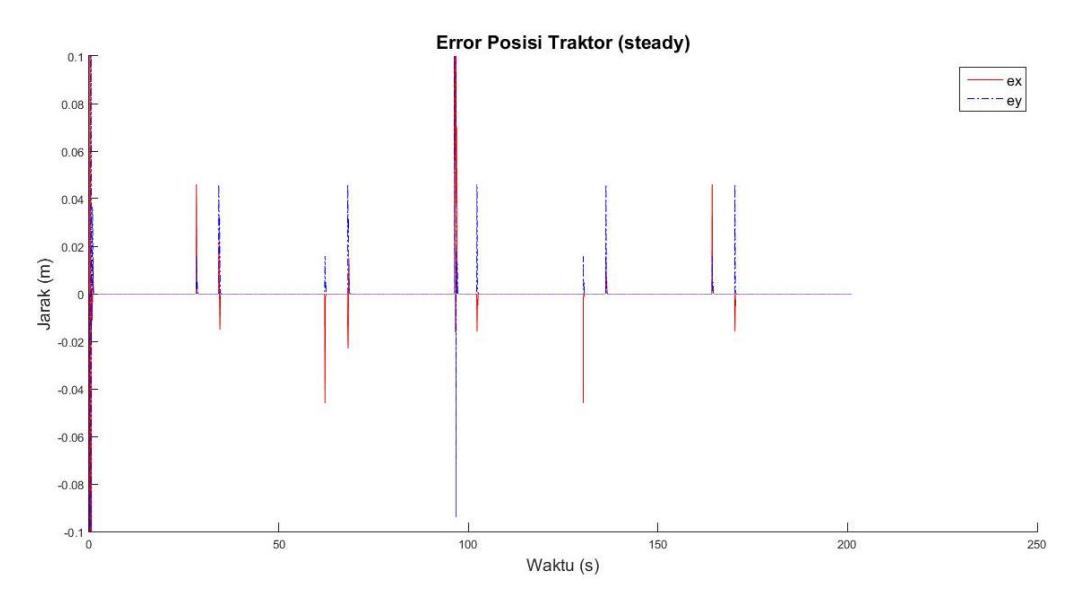
Gambar 7. Error Posisi x dan y pada multi segmen
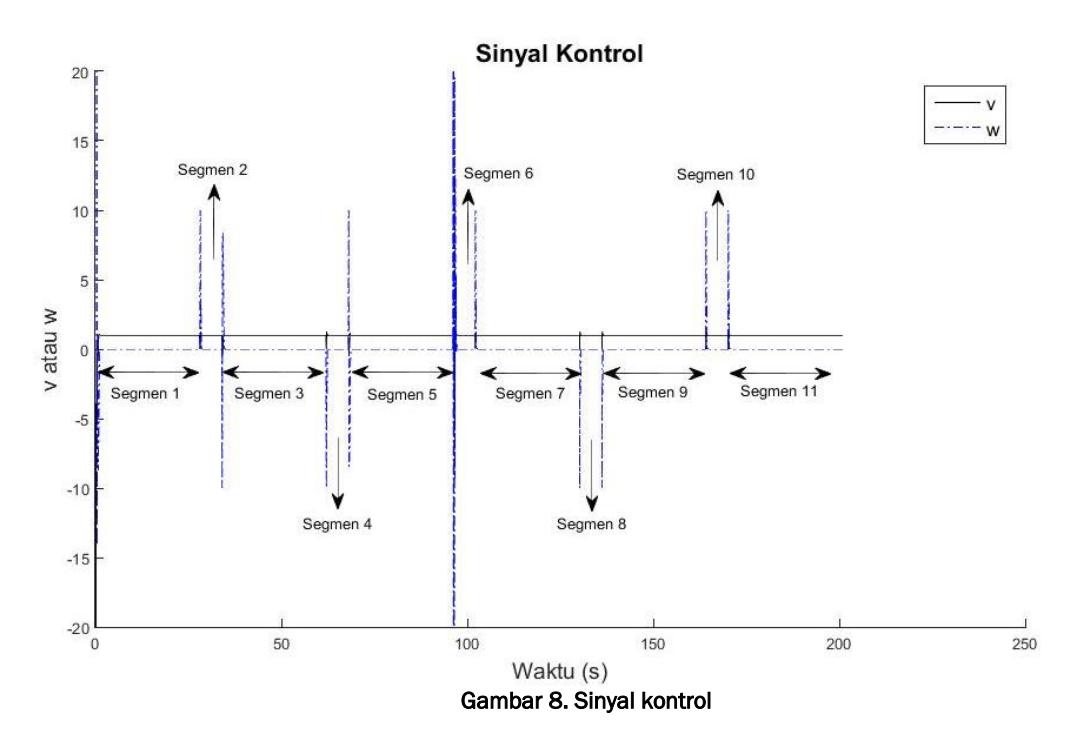
Error keseluruhan dapat dilihat pada Gambar 7. Berdasarkan gambar tersebut error terlihat memuncak saat traktor mengalami perubahan segmen atau pada saat traktor berbelok arah. Hal ini dikarenakan ada penambahan nilai kecepatan traktor yang meningkat saat berbelok untuk mengejar posisi lintasan yang selalu berubah konstan terhadap waktu. Gambar 8 menunjukkan bahwa sinyal kontrol berubah secara drastis untuk mengkompensasi pengejaran lintasan pada saat perubahan segmen.
5 Kesimpulan
Simulasi pembuatan lintasan penjejak dapat dihasilkan secara otomatis dari data panjang dan lebar lahan dengan megikuti batasan interval alur 2, 3, dan 6 meter. Hasil tuning memberikan nilai IAE (integral absolute error) minimal 9,7971 dengan nilai parameter b = 0,1, Kv = 10 dan Kω = 10. Penerapan nilai parameter pada simulasi multi segmen menunjukkan hasil trayectori tracking yang cukup baik yaitu tercapainya error keseluruhan yang cukup kecil. Akan tetapi, error puncak terjadi pada saat perubahan segmen atau pada saat traktor berbelok arah. Sehingga diperlukan suatu strategi pengontrolan yang perlu ditelaah lebih lanjut untuk meminimalkan error saat terjadi perubahan segmen.
6 Daftar Pustaka
- [1] https://www.litbang.pertanian.go.id/info-teknologi/3386/ 2015, (20 Mei 2019).
- [2] Sutisna, S.P., Tracking Control System of Autonomous Four Wheel Tractor on Straight Path, AGRITECH, Vol. 35, No. 1, pp. 106-113, 2015.
- [3] Direktorat Jendral Prasarana dan Sarana Pertanian Kementrian Pertanian, Statistik Prasarana dan Sarana Pertanian 2011—2015, pp. 30,2016.
- [4] Kayacan, E., Kayacan, E., Ramon, H., Wouter, S., Towards agrobots: Identification of the yaw dynamics and trajectory tracking of an autonomous tractor, ELSEVIER: Computers and Electronics in Agriculture 115, 2015.
- [5] Marata, L., Chuma, J. M., Yahya, A., Ngebani, I., Assumption-free noise suppression for autonomous tractors tracking, 2016 IEEE Radio and Antenna Days of the Indian Ocean (RADIO), pp. 1-2, 2016.
- [6] Hejase,M., Jing,J., Maroli, J.M., Salamah, Y.B., Fiorentini, L., dan Özgüner, U., "Constrained Backward Path Tracking Control using a Plug-in Jackknife Prevention System for Autonomous Tractor-Trailers", 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, pp. 2012-2017, 2018.
- [7] Liu, X., Madhusudhanan, A. K., Cebon, D., Minimum Swept-Path Control for Autonomous Reversing of a Tractor Semi-Trailer, in IEEE Transactions on Vehicular Technology, pp., 2019.
- [8] Kayacan, E., Peschel, J. M., Kayacan, E., Centralized, decentralized and distributed nonlinear model predictive control of a tractor-trailer system: A comparative study, 2016 American Control Conference (ACC), pp. 4403- 4408, 2016.
- [9] Kayacan, E., Ramon, H., Saeys, W., Robust Trajectory Tracking Error Model-Based Predictive Control for Unmanned Ground Vehicles, in IEEE/ASME Transactions on Mechatronics, vol. 21, no. 2, pp. 806-814, 2016.
- [10] Kayacan, E., Kayacan, E., Ramon, H., Kaynak, O., Saeys, W., Towards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers," in IEEE/ASME Transactions on Mechatronics, vol. 20, no. 1, pp. 287-298, 2015.
- [11] Widyotriatmo, A., Dasar-dasar Mekatronika dan Robotika, ITB Press, pp. 115-117 & pp. 123-125, 2018.
- [12] Srisumoungklounggoon, T., Charoensuk, N., Modelling and Control Design of an Autonomous Walking Tractor, 6th International Symposium on the Fusion of Science and Technologies (ISFT2017), 2017.
- [13] Bautista, A. J., Development of an Autonomous Hand Tractor Platform for Philippine Agricultural Operations, 2018 18th International Conference on Control, Automation and Systems (ICCAS 2018), pp. 130-134, 2018.
- [14] Myint, C., Win, N. N., Position and Velocity control for Two-Wheel Differential Drive Mobile Robot, International Journal of Science, Engineering and Technology Research (IJSETR) vol. 5, Issue 9, pp. 2849- 2855, 2016.
- [15] Aziz, A. N., Pitowarno, E., Implementasi Metode Kontrol ν,ω Berbasis Proporsional Integral Untuk Kontrol Gerak Mobile Robot Berpenggerak Differensial : Studi Simulasi. Industrial Electronic Seminar, 2009