
1 Pendahuluan
Uap air adalah zat yang tercampur pada gas alam ketika baru keluar dari sumur sumber gas tersebut. Hal itu umum ditemukan dan menjadikan gas harus dimurnikan terlebih dahulu sebelum didistribusikan nantinya. Cara memurnikan gas alam ialah dengan proses distilasi menggunakan Dehydration glycol unit. Pemurnian cara klasik ini masih digunakan hingga saat ini sehingga hampir di setiap kilang gas menggunakan Dehydration glycol unit dalam prosesnya. Oleh karena itu memahami cara kerja dan cara mengendalikan Dehydration glycol unit begitu penting.
PID adalah metode kontrol paling populer digunakan pada industri. Survey menunjukkan 90% loop kontrol menggunakan struktur kontrol PI atau PID [8]. Agar parameter kontrol PID bekerja dengan baik, dibutuhkan sebuah penalaan.
Metode penalaan Ziegler-Nichols (ZN) ditemukan oleh John Ziegler dan Nathaniel Nichols pada tahun 1942 [1]. Ada dua cara dalam penalaan PID, pertama dari respons step sistem tersebut dan kedua dari respons osilasi sistem. Untuk melakukan penalaan degan cara pertama, hal yang pertama kali dilakukan adalah dengan memberikan input step dan sistem akan merespons input tersebut hingga mencapai keadaan tunak [2]. Saat sistem sudah mencapai keadaan tunak, dapat ditentukan nilai \(t_{10}\) dan \(t_{90}\) dimana keduanya adalah waktu ketika sistem mencapai nilai 10% dan 20% sebelum keadaan tunak. Dari waktu tersebut akan digunakan untuk mencari gain, time constant (\(\tau\)), dan dead time (\(\theta\)). Tiga nilai tersebut merupakan nilai penting untuk mendapatkan parameter PID pada metode ini.
Penalaan pengamatan respons osilasi sistem menggunakan aksi kontrol Proporsional (P) [1]. Untuk membuat sistem mengalami osilasi sempurna yaitu dengan mencari nilai \(K_P\)[1]. Nilai \(K_P\) yang dapat membuat sistem mengalami osilasi dinamakan gain ultimate \(K_u\). Hasil respons osilasi akan diamati jarak antara dua puncak terdekat (\(P_{cr}\)) dengan begitu parameter PID dapat ditentukan.
Swatala degan metode relay dapat dikatakan hampir sama dengan pengamatan respons osilasi pada metode ZN [3]. Perbedaannya adalah, untuk membuat respons osilasi pada sistem menggunakan histeresis. Metode ini ditemukan oleh Åström dan Hägglund untuk memperbaiki metode ZN respons osilasi [4]. Gain ultimate akan tetap dicari dengan menggunakan nilai histeresis dan amplitude respons [5].
Pada paper ini akan dibahas mengenai komparasi antara hasil respons penalaan manual dengan swatala pada plant Dehydration Glycol Unit. Dari perbandingan tersebut akan dipaparkan hasil respons sehingga menjadi
wawasan dalam melakukan penalaan pada plant tersebut. Kontrol hanya akan digunakan adalah PID dan besaran fisis level, sedangkan perhitungan akan menggunakan JavaScript sebagai bahasa pemrograman.
2 Dehydration Glycol Unit
Cara kerja dari Dehydration Glycol Unit adalah dengan mengalirkan gas alam (mengandung air dan zat campuran seperti hidrokarbon dll.) melalui bawah contractor tower. Kemudian gas akan menuju bagian atas dari contractor tower melewati mist extractor sehingga sebagian dari air yang tercampur berkurang, setelah itu gas alam akan melewati bubble cap trays. Pada saat yang bersamaan, glikol dialirkan menuju bagian atas contractor tower. Glikol akan menuju bagian bawah contractor tower melalui bubble cap trays. Gas dan glikol akan bertemu, kemudian kandungan air yang tercampur pada gas akan terserap oleh glikol sehingga kandungan air akan berkurang, fenomena tersebut terjadi di setiap bubble cap trays.
Glycol yang sudah berikatan dengan air akan terkumpul pada dasar contractor tower dan dialirkan melewati reflux coil menuju heat exchanger untuk diproses di ashgas separator. Proses yang terjadi di ashgas separator adalah pemisahan glikol dari air beserta zat lain yang terikat dengan glikol. Zat yang sudah terpisah dari glikol akan dialirkan menuju proses selanjutnya dan glikol yang sudah bersih akan dialirkan kembali menuju bagian atas contractor tower. Selanjutnya gas yang sudah terpisah dari air dialirkan menuju reflux drum.
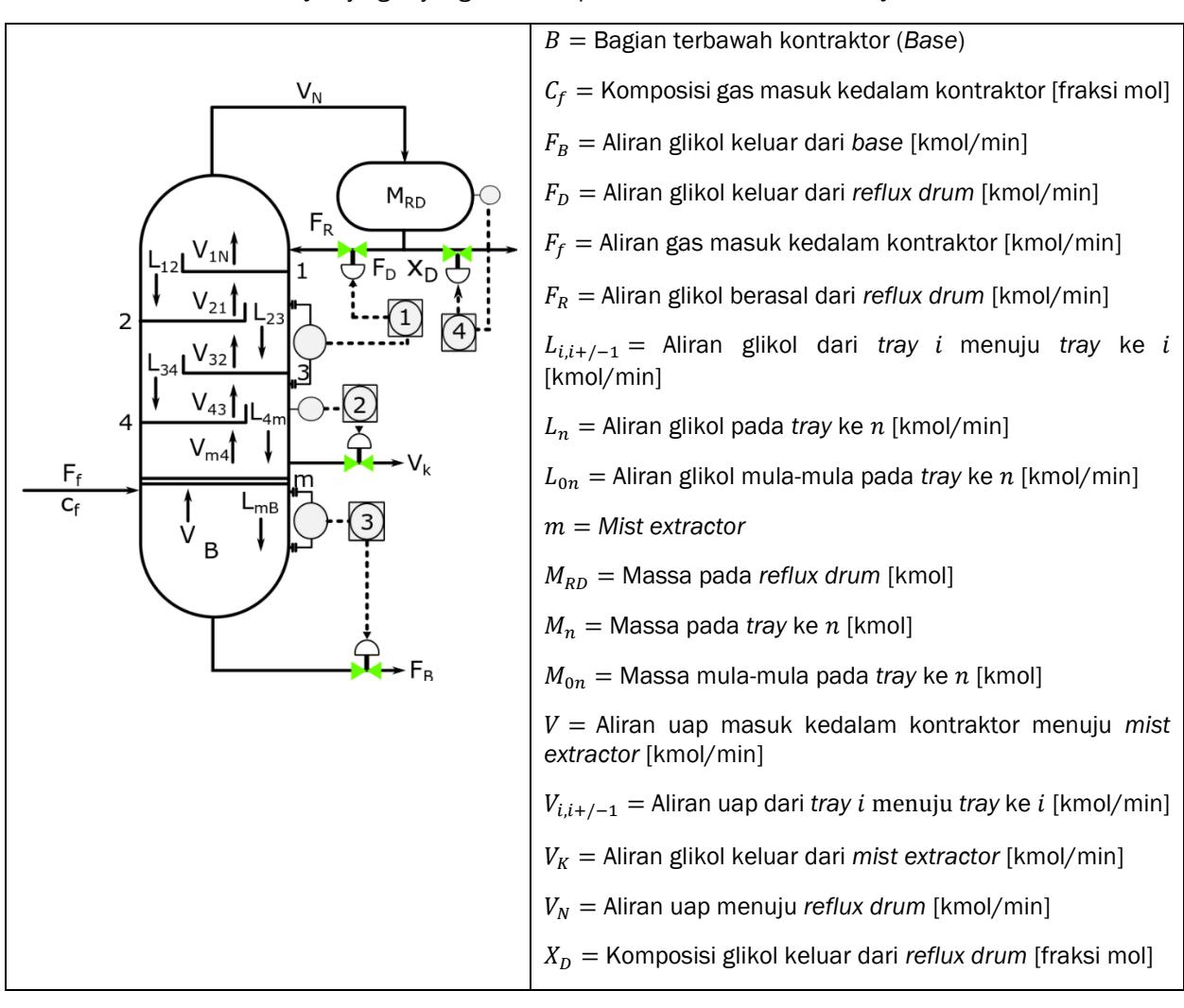
Gambar 1 P&ID Dehydration Glycol Unit
Penentuan model Dehydration Glycol Unit direpresentasikan dari gambar diatas dimana model, di asumsikan bahwa uap pada setiap tray bernilai sama, tekanan dalam kontraktor konstan, konstanta volatilize dua komponen konstan uap pada setiap tray sehingga persamaan matematis dituliskan sebagai berikut [6]:
a. Bagian atas kontraktor (tray 1) \[\frac{dM}{dt} = F_R + V_{21} - L_{12} - V_{1N}\] (1)
b. Bagian setiap \[tray\] \[\frac{dM_i}{dt} = L_{i-1,i} + V_{i+1,i} - L_{i,i+1} - V_{i,i-1}\] (2)
c. Bagian mist extractor \[\frac{dM_m}{dt} = L_{4m} + V - L_{mB} - V_{m4} - V_K \tag{3}\]
d. Bagian bawah kontraktor (base) \[\frac{dM_B}{dt} = F_f + L_{mB} - F_B \tag{4}\]
e. Bagian reflux drum \[\frac{dM_{RD}}{dt} = V_N + F_R - F_D \tag{5}\]
Selanjutnya, untuk mendeskripsikan jatuhnya glycol yang terbendung pada tray dituliskan menggunakan persamaan Francis Weir sebagai berikut [7][8] :
\[L_n = \frac{L_{0n} + (M_n - M_{0n})}{\tau} \tag{6}\]
3 Rancangan Arsitektur Kontrol Loop
Kontrol PID umum digunakan karena strukturnya, efektifitas yang bagus dan mudahnya dalam implementasi. Dinamakan PID karena keluaran dari kontrol ini adalah penjumlahan dari ketiga komponen kontrol tersebut. Alasan mengapa kontrol PID umum digunakan karena persamaan kontrol ini tidaklah rumit seperti matematika kompleks. Berikut adalah rumus dari kontrol PID:
\[u(t) = K_p \left( e(t) + \frac{1}{T_i} \int_0^t e(t) + T_d \frac{de(t)}{dt} \right)\] (7)
Dimana u(t) adalah keluaran sinyal kontrol, e(t) adalah selisih hasil keluaran dengan SP (galat), Sedangkan \(K_p\), \(K_i\), dan \(K_d\) adalah gain proporsional, gain integral dan gain derivatif [9]. Ada 3 loop kontrol pada Dehydration glycol unit yang telah tertera pada P&ID Gambar 1. Masing-masing loop tersebut dipasangi pengontrol PID. Pada kesempatan pertama, PID tersebut ditala secara manual. Selanjutnya PID diberi swa-tala metode relay, dengan diagram blok seperti Gambar 2.a.
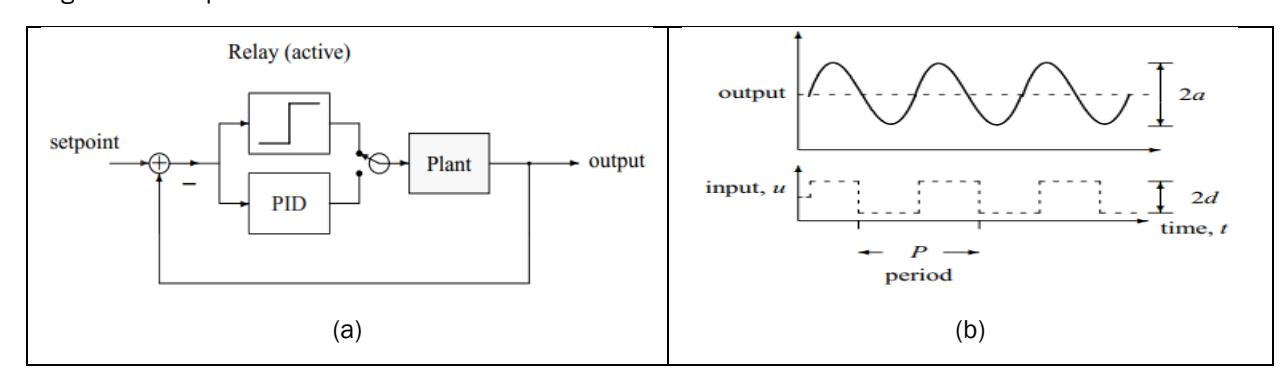
Gambar 2 Arsitektur Kontrol dan keluaran Swa-tala [10]
Prinsip kerja dari swa-tala ini berdasarkan pada informasi periode dan magnitude osilasi dari respons keluaran kontrol [10]. Prinsip ini mirip dengan kontrol on-off atau kontrol histeresis yang hanya memiliki dua keadaan saja, yaitu maksimum dan minimum. Pada Gambar 2.b, Nampak bahwa ketika variabel proses melebihi nilai set point dan menyentuh nilai maksimum histeresis maka keluaran relay akan bernilai negatif, sedangkan apabila variabel proses dibawah nilai set point dan menyentuh nilai maksimum histeresis maka nilai relay akan menjadi positif. Hal tersebut menyebabkan respons keluaran dari sistem mengalami osilasi dengan sempurna.
Informasi dari nilai magnitude tersebut akan dijadikan dasar untuk mencari nilai dan . Nilai dapat dicari dengan persamaan sebagai berikut:
\[K_u = \frac{4d}{\pi A} \tag{8}\]
Keterangan :
= Amplitudo
= Keluaran relay puncak ke puncak (histeresis)
= Gain ultimate
4 Simulator Berbasis JavaScript
Sistem ini dirancang sebagai aplikasi berbasis web yang dijalankan menggunakan browser. Seperti diberikan pada Gambar 3, sistem terdiri atas user interface (UI) berbasis hypertext markup language (HTML) dan scalable vector graphics (SVG), serta mesin simulator JavaScript (JS). HTML berperan sebagai wadah JavaScript dan SVG. Kemudian JavaScript berperan melakukan perhitungan matematis yang nantinya akan digunakan untuk memanipulasi objek SVG. Sedangkan SVG digunakan untuk antarmuka simulator.
Gambar 3 Arsitektur Simulator dan User Interface
Antarmuka pengguna berfungsi untuk menampilkan berbagai informasi proses secara dinamis, serta menerima masukan dari pengguna sistem. Untuk itu, seperti Nampak pada Gambar 4, ditampilkan grafik P&ID plant berikut grafik berbagai variabel proses. Pada antarmuka juga terdapat tombol dan menu untuk mengubah parameter proses (misalnya menala PID). Selama simulasi, berbagai variabel proses akan direkam dan dapat diunduh dalam format CSV (comma separated values).
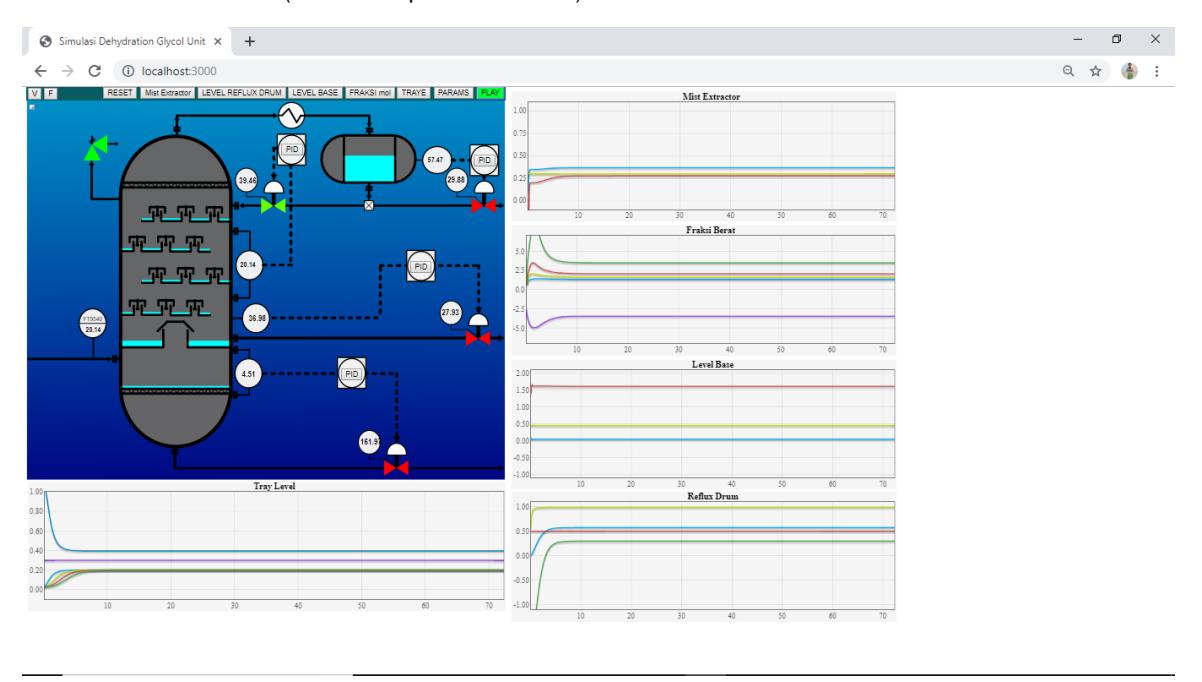
Gambar 4 User Interface
Sementara itu, simulator dibuat menggunakan metode Euler agar mudah dan cepat dalam mengalkulasi. Dibawah ini adalah pseudocode simulator :
Set(waktu_cuplik, parameter, state, waktu) Tampilkan(state, waktu) While running do Read(input) delta_state = perubahan_state(parameter, state, input, waktu) state = state + (delta_state * waktu_cuplik) waktu = waktu + waktu_cuplik Tampilkan(state, waktu) End
Selanjutnya pemrograman antarmuka maupun simulator tersebut menggunakan JavaScript dengan pustakapustaka bantu seperti dijabarkan pada Tabel 1.
| No | Pustaka | Fungsi | File yang digunakan |
|---|---|---|---|
| 1 | Node.js | Sebagai server untuk memuat simulator. | node.js |
| 2 | Flotr2 | Membuat dan menampilkan animasi grafik. | flotr2.js |
| 3 | FileSaver | Membuat dan menampilkan animasi grafik. | FileSaver.js |
| 4 | Snap.svg | Menampilkan gambar SVG sebagai UI. | Snap.svg.js |
| 5 | Sprintf | Memanipulasi teks angka sebagai animasi. |
Tabel 1 Pustaka-pustaka penunjang.
5 Uji Coba Simulator
Saat uji coba, akan dibandingkan kinerja sistem berdasar penalaan manual dan swa-tala. Pengguna akan diberi dua pilihan metode penalaan ketika hendak menggunakan simulator. Pada penalaan manual, sistem akan diberikan respons step dalam kondisi loop terbuka. Ketika sudah mencapai keadaan tunak maka akan dicari nilai gain, time constant (), dan dead time () dengan menggunakan waktu ketika sistem mencapai 10% dan 90% dari nilai keadaan tunak. Dari hasil tersebut, akan dihitung parameter PID memakai metode Ziegler Nichols. Setelah itu dilakukan uji respons step kembali, dengan memasukkan PID yang telah ditala dengan parameter hasil perhitungan tersebut. Sementara itu pada metode swa-tala, pengguna hanya perlu memasukan nilai histeresis dan sistem akan menghitung nilai PID mandiri. Berikut ini hasil perbandingan antara penalaan manual dan swa-tala.
a. Bagian setiap tray (Loop 1)
Nilai parameter PID yang didapat pada masing-masing penalaan adalah sebagai berikut:
No Penalaan P I D h 1 Manual 1,08 2,00 0,5 2 Swa-tala 2,15 0,55 0,13 5
Tabel 2 Parameter PID pada tray.
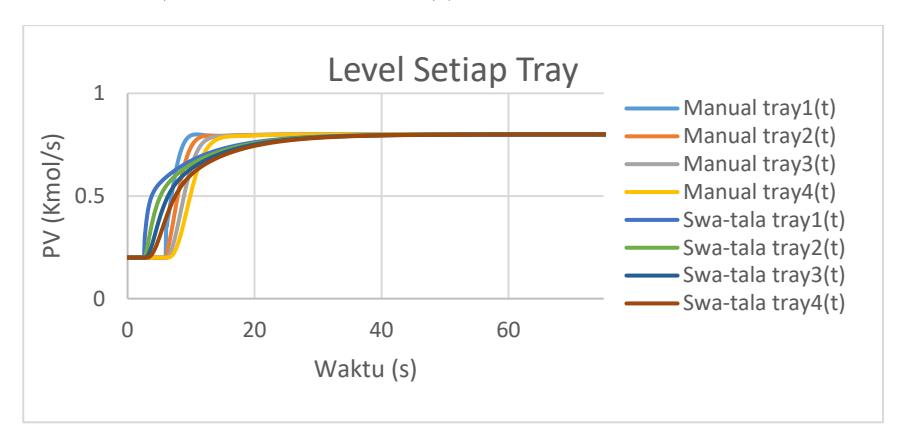
Gambar 5 Hasil Perbandingan Penalaan Level Setiap Tray
Tabel 3 Analisa Respons Setiap Tray
| No | Analisa | Manual | Swa-tala | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Tray 1 | Tray 2 | Tray 3 | Tray 4 | Tray 1 | Tray 2 | Tray 3 | Tray 4 | ||
| 1 | Delay Time (s) | 6,7 | 7,5 | 8,4 | 9,4 | 3,7 | 5,1 | 6,3 | 7,6 |
| 2 | Rise Time(s) | 6,5 | 8,8 | 9,9 | 11 | 15,3 | 15,8 | 18 | 19,2 |
| 3 | Peak Time(s) | - | - | - | - | - | - | - | - |
| 4 | Maximum Overshoot | - | - | - | - | - | - | - | - |
| 5 | Time Constant (s) | 6,9 | 7,9 | 8,9 | 9,8 | 5,4 | 6,8 | 8 | 5,6 |
| 6 | Settling Time (s) | 15,7 | 15,9 | 16,4 | 19,3 | 30,2 | 38,1 | 40,2 | 48 |
Respons rise time tray tercepat ada pada urutan pertama sedangkan terlama di urutan terakhir dan ini terjadi pada kedua penalaan. Hal tersebut dapat terjadi dikarenakan tray memiliki ketergantungan pada tray lainnya berdasarkan urutan. Tray pada urutan kedua baru akan terisi jika tray pada urutan pertama sudah membendung penuh, begitu pula seterusnya. Kemudian, pada bagian tray penalaan manual memiliki respons waktu tunda dan time constant lebih lama masing-masing 3 s dan 1.5 s dari swa-tala dengan referensi tray 1 hal tersebut dikarenakan nilai kontrol Proporsional pada swa-tala lebih besar dari penalaan manual, namun memiliki nilai waktu lebih cepat pada rise time dan settling time masing-masing 8.8 s dan 22.4 s dengan referensi tray 1.
b. Bagian mist extractor (Loop 2)
Tabel 4 Parameter PID pada mist extractor.
| No | Penalaan | P | I | D | h |
|---|---|---|---|---|---|
| 1 | Manual | 0,84 | 2,00 | 0,50 | |
| 2 | Swa-tala | 2,1211 | 0,15 | 0,0375 | 5 |

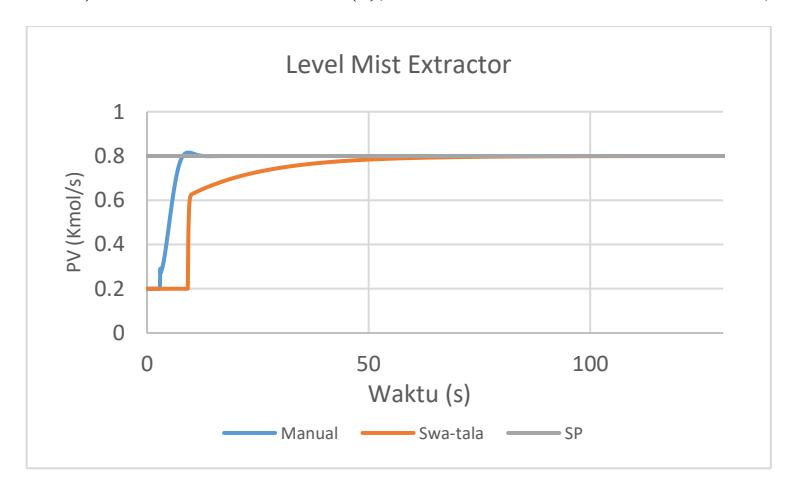
Gambar 6 Hasil Perbandingan Penalaan Level Mist extractor
Tabel 5 Analisa Respons Mist extractor
| No | Analisa | Manual | Swa-tala |
|---|---|---|---|
| 1 | Delay Time (s) | 5,1 | 9,4 |
| 2 | Rise Time (s) | 7 | 27,6 |
| 3 | Peak Time (s) | 9,3 | - |
| 4 | Maximum Overshoot | 0,81 | - |
| 5 | Time Constant (s) | 5,5 | 9,6 |
| 6 | Settling Time (s) | 12,9 | 83 |
Pada penalaan manual, sistem mengalami overshoot sebesar 0,81 pada s ke 9,3 akan tetapi hal tersebut tidak terjadi pada swa-tala. Tidak terjadinya overshoot pada swa-tala menyebabkan lebih besarnya nilai settling time yaitu selama 83 s bila dibandingkan dengan penalaan manual. Untuk delay time, time rise, dan time constant penalaan manual masing-masing selama 5,1 s, 7 s dan 5,5 s. Waktu tersebut lebih lama dari swa-tala.
c. Bagian bawah kontraktor (base) (Loop 3)
Tabel 6 Parameter PID pada base.
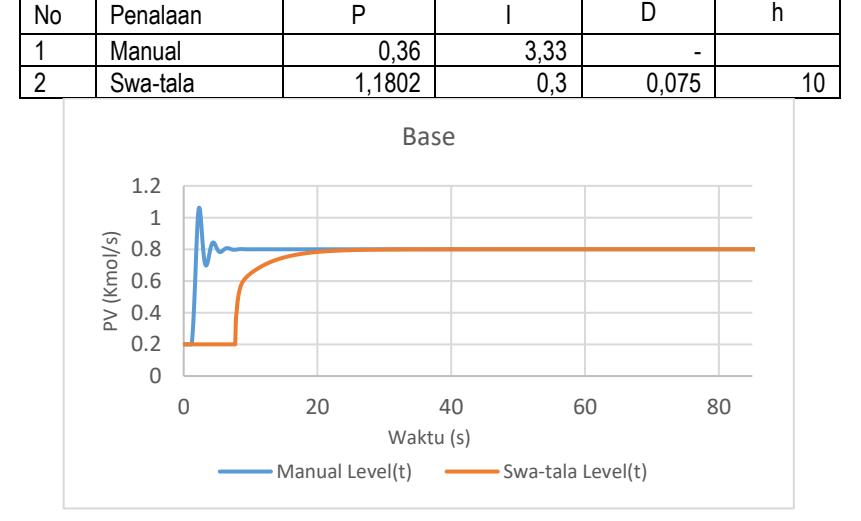
Gambar 7 Hasil Perbandingan Penalaan Level Base
Tabel 7 Analisa Respons Base
| No | Analisa | Manual | Swa-tala |
|---|---|---|---|
| 1 | Delay Time (s) | 1,6 | 8,1 |
| 2 | Rise Time (s) | 1,8 | 14 |
| 3 | Peak Time (s) | 2,2 | - |
| 4 | Maximum Overshoot | 1,06 | - |
| 5 | Time Constant (s) | 1,7 | 8,5 |
| 6 | Settling Time (s) | 6,2 | 26,6 |
Penalaan manual pada bagian base digunakan kontrol PI, hal tersebut dikarenakan respons kontrol PI dapat mencapai nilai setpoint. Pada penalaan manual sistem mengalami overshoot sedangkan pada swatala tidak. Namun, settling time pada swa-tala lebih lama dengan waktu 26,6 s jika dibandingkan dengan penalaan manual.
d. Bagian reflux drum (Loop 4)
Tabel 8 Parameter PID pada base.
| No | Penalaan | P | I | D | h |
|---|---|---|---|---|---|
| 1 | Manual | 1,2 | 2 | 0,5 | |
| 2 | Swa-tala | 2,1634 | 0,15 | 0,0375 | 5 |
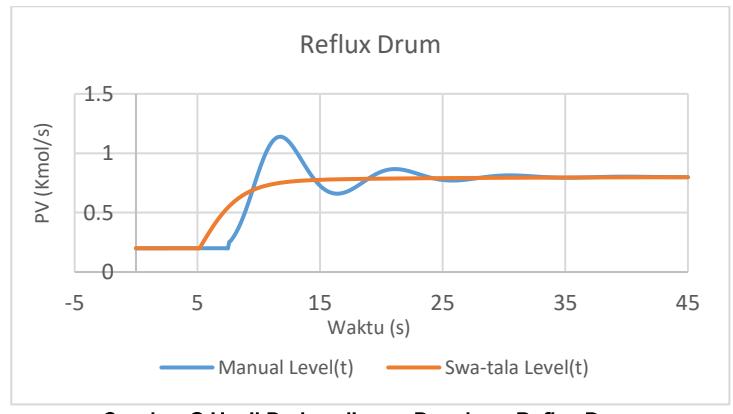
Gambar 8 Hasil Perbandingan Penalaan Reflux Drum
Tabel 9 Analisa Respons Reflux Drum
| No | Analisa | Manual | Swa-tala |
|---|---|---|---|
| 1 | Delay Time (s) | 8,9 | 7,1 |
| 2 | Rise Time (s) | 9,7 | 11 |
| 3 | Peak Time (s) | 11,8 | - |
| 4 | Maximum Overshoot | 1,13 | - |
| 5 | Time Constant (s) | 9,2 | 7,8 |
| 6 | Settling Time (s) | 38,8 | 30,2 |
J.Oto.Ktrl.Inst (J.Auto.Ctrl.Inst) Vol 12 (1), 2020 ISSN : 2085-2517, e-ISSN: 2460-6340
Untuk penalaan manual pada reflux drum respons mengalami overshoot sebesar 1,29 pada s ke 7,1. Nilai delay time, rise time, dan time constant swa-tala masing-masing selama 8,9 s, 9,7 s, dan 9,2 s lebih lama dari pada penalaan manual dikarenakan nilai kontrol Proporsional swa-tala lebih besar dan pada swa-tala tidak memiliki overshoot.
6 Kesimpulan
1. Bagian tray dengan penalaan manual, tray pada urutan pertama memiliki nilai settling time tercepat yaitu selama 15,7 s. sedangkan yang terlama adalah tray pada urutan ke empat dengan waktu selama 19,3 s. Untuk swa-tala settling time tercepat ada pada tray urutan pertama dengan lama 30,2 s dan terlama pada urutan ke empat selama 48 s. Penalaan manual dan swa-tala pada tray tidak mengalami overshoot.
Pada mist extractor respons penalaan manual mengalami overshoot sebesar 0,81 pada s ke 9,3 sedangkan respons swa-tala tidak menghasilkan overshoot. Settling time penalaan manual dan swatala masing-masing selama 12,9 s dan 83 s. Respons swa-tala membutuhkan waktu lebih lama untuk mencapai keadaan tunak.
Untuk bagian base kontrol yang digunakan pada penalaan manual adalah PI, dikarenakan pada kontrol lain sistem tidak mencapai nilai setpoint. Respons penalaan manual mengalami overshoot sebesar 1,06 pada s ke 2,2 dengan settling time selama 6,2 s. pada swa-tala respons tidak mengalami overshoot namun waktu untuk mencapai keadaan tunak lebih lama yaitu 26,6 s.
Terakhir pada bagian reflux drum, respons penalaan manual mengalami overshoot sebesar 1,29 pada s ke 7,1 sedangkan pada swa-tala tidak. Untuk settling time, respons penalaan manual mem butuhkan waktu lebih lama untuk mencapai keadaan tunak. Settling time penalaan manual dan swa-tala masingmasing adalah 4,31 s dan 30,2 s.
2. Pemrograman simulator menggunakan JavaScript cukup mudah dilakukan karena telah tersedia berbagai pustaka penunjang. Perhitungan dinamika sistem simulator menggunakan algoritme Euler dapat dituliskan dalam 47 Line of Code. Untuk penalaan manual dan swa-tala dituliskan masing-masing 12 dan 41 Line of Code.
7 Referensi
- [1] Ogata, K. 1970. Modern Control Engineering. 5th edition. Prentice Hall.
- [2] Liptak B.G, Instrument Engineers Handb ook Process Control and Optimization, Vol 2., CRC Press. 1995.
- [3] Wu, A., Weihua, S. & Zhiguo, L., PID Controllers: design and tuning method., IEEE, pp 808 813 , 2014.
- [4] Prokop, R., Ji, K., S. & Radek, M., Relay Feedback Identification of Dynamical SISO System Analysis and Settings., Latest Trends on System, pp 450 – 454.
- [5] Ho, W, K., Y, Hong., A, Hanson., H, Hjalmarsson & J, W, Deng., Relay Auto-tuning of PID Controllers Using Iterative Feedback Tuning., Automatica, pp 149 – 157 , 2003.
- [6] S, Skogestad., Dynamics and Control of Distillation Columns: A Critical Survey., Modelling, Identification and Control, pp 177 – 217, 1997.
- [7] S, Skogestad., Dynamics and Control of Distillation Columns: A Tutorial Introduction., Institution of Chemical Engineering, pp 539 – 562, 1997.
- [8] Ekawati, E., Megarini, H. & Tua, A, T,. Process and Controller Configuration of High Purity Binary Distillation Columns in the Purification Stage of Petrochemical Plant. IEEE, pp 82 – 88, 2017.
- [9] Chopral, V., Sunil, K., Sigla, L, D., Comparative Analysis of Tuning a PID Controller using Intelligent Methods. Acta Polytechnica Hungarica, pp 235 – 249, 2014.
- [10] Utomo, S, D., Djoko, P & Tria, A, S., Implementasi Metode Auto Tuning PID Pada Balancing Robot. Teknik Elektro ITS, pp 1 – 9.