
1 Pendahuluan
Sistem kontrol untuk menerbangkan pesawat tanpa awak (drone) sangat kompleks disebabkan oleh sifat non linear dan ketidakpastian akibat karakteristik rotor untuk mengangkatnya [1]. Motor yang digunakan cenderung tidak linear antara kecepatan putar dengan power supply yang digunakan [2]. Bahkan gaya gravitasi membuat gaya angkat drone menjadi rumit berkaitan dengan bentuk drone terhadap titik beratnya[3]. Sifat aerodinamis menambah teknik penerbangan drone menjadi tidak sederhana. Permasalahan ini membuat kajian baik teori dan eksperimen pada teknik penerbangan drone menjadi sangat menantang dalam dunia penelitian. Bahkan, teknologi drone banyak dimanfaatkan di berbagai bidang seperti penginderaan jauh, militer, pertanian, seni dan sebagainya.
Helikopter merupakan jenis satu tipe drone yang memiliki kemampuan manuver yang sangat baik. Tidak memerlukan landasan yang cukup panjang, helikopter dapat tinggal landas tegak lurus sehingga dapat menghemat area tinggal landas. 3 DOF helikopter [4] merupakan fasilitas pengembangan teori kontrol dan pengujian eksperimen teknik penerbangan drone bikopter dalam 3 sudut manuver pergerakannya. Dua rotor pada kedua sisi helikopter untuk memberikan gaya angkat agar dapat melayang melawan gaya gravitasi. Chinook helikopter merupakan salah satu bikopter yang populer di dunia. Sensor sudut terpasang sebagai umpan balik pengukur posisi drone. Personal Computer (PC) terhubung ke amplifier untuk menggerakan kedua rotor dengan pemberian energi listrik. Software Matlab dan Simulink terinstal pada PC untuk merancang teknik kontrol penerbangan bikopter tersebut. Oleh karena itu 3 DOF helikopter menawarkan sarana pembelajaran yang baik untuk pengembangan teknik kontrol penerbangan drone bikopter [5].
Gambar 1 Fasilitas belajar dan penelitian teknik penerbangan drone bikopter dengan 3 DOF helikopter
Salah satu keberhasilan awal posisi terkontrol pada penerbangan drone adalah posisi tinggal landas yang stabil dan akurat karena berkaitan dengan keselamatan. Jika pesawat tanpa awak gagal melakukan take off maka akan jatuh dan berakibat fatal. Metode kontrol yang populer yang dipelajari adalah teknik kendali PID [6]. Bahkan, dunia industri banyak yang menerapkan metode kontrol PID untuk menjalankan proses bisnisnya dengan berhasil. Tujuan penelitian ini adalah untuk mengkaji teori dan penerapan eksperimen teknik kontrol PID dalam menerbangkan drone bikopter pada posisi tinggal landas. Variasi koefisien PID (KP, KI, KD) akan diinvestigasi terhadap masing-masing akurasi respon sinyal step hasil eksperimen 3 DOF helikopter. Tidak hanya dasar teori tetapi juga metode eksperimen akan dijabarkan pada bagian artikel ini. Performa teknik kontrol PID dalam menerbangkan posisi tinggal landas drone bikopter akan dianalisa pada pembahasan makalah ini.
2 Dasar Teori dan Metode Eksperimen
Teknik kontrol PID yang telah banyak diaplikasikan di dunia industri, memiliki 3 kemampuan perhitungan dalam aksi pengendalian suatu sistem yaitu proportional, integral and derivatif. Output dari metode PID yaitu mengkoreksi kesalahan plant sehingga pengendalian optimal untuk mendapatkan hasil yang akurat sesuai karakteristik yang diinginkan. Perhitungan teknik kontrol PID [7] dapat dilihat pada persamaan (1) di bawah ini:
\[u(t) = K_{p}.e(t) + K_{l} \int_{0}^{t} e(t')dt' + K_{D} \frac{de(t)}{dt}\] (1)
Sedangkan fungsi transfer metode PID dalam domain frekuensi (laplace) dapat ditulis berikut ini :
\[L(s) = K_p + K_I.s + \frac{K_D}{s}\] (2)
Keterangan:
u(t) = output pengendali PID
e(t) = kesalahan, perbedaan antara nilai yang diinginkan dan yang terukur.
Kp = koefisien gain proportional
K<sub>I</sub> = koefisien gain integral
K<sub>D</sub> = koefisien gain derivative
t = waktu
s = frekuensi kompleks
Berikut ini blok diagram teknik kontrol PID pada kalang tertutup yang menghitung nilai kesalahan dan memperbaikinya sesuai koefisien gain PID (Kp, KI and KD) secara automatis dan kontinyu,
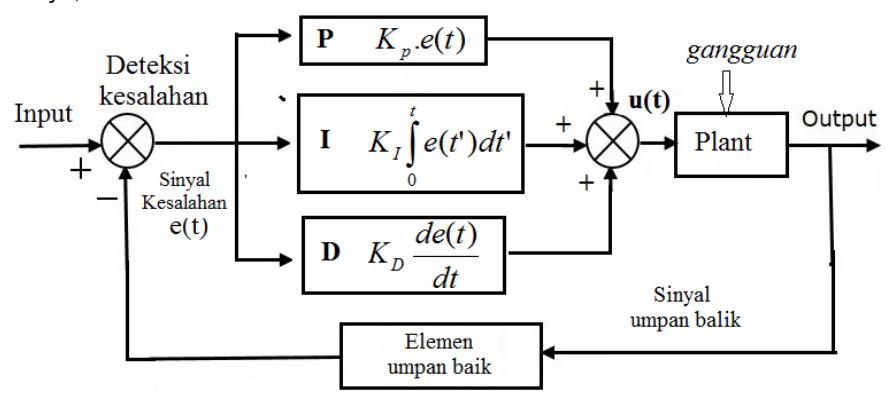
Gambar 2 Diagram teknik kontrol PID
Pada diagram Gambar 2 metode PID berusaha meminimalkan kesalahan setiap waktu dengan pengaturan output pengendali u(t) dengan penjumlahan tiap koefisien gain PID. Proses pengaturan dari gain PID untuk mendapatkan nilai optimal yang diharapkan. Teknik kontrol PID ini dapat diuji performanya terhadap plant yang memiliki karakter yang kompleks dan tidak linear seperti kendali penerbangan drone.
Gambar 3 Posisi tinggal landas bikopter pada simulator 3 DOF helikopter
Eksperimen simulasi teknik kendali penerbangan drone bikopter dapat menggunakan fasilitas 3 DOF helikopter sesuai Gambar 3 di atas. Terdapat 2 rotor yang menganalogikan 2 baling-baling bikopter yaitu bagian depan dan belakang. Motor depan digerakkan oleh tegangan depan (VF) dan tegangan belakang untuk menggerakan motor belakang (VB). Personal Computer (PC) mengirimkan sinyal perintah melalui amplifier untuk mensuplai tegangan dan arus dalam memutar baling-baling pada kedua rotornya. Sensor [8] posisi sudut digunakan sebagai elemen umpan balik dalam mengukur posisi tinggal landas drone. Posisi tinggal landas yang sempurna ketika sudut tegak lurus dengan badan drone dan tiang (ɵ°=90) atau sudutnya 0° terhadap sumbu badan pesawat.
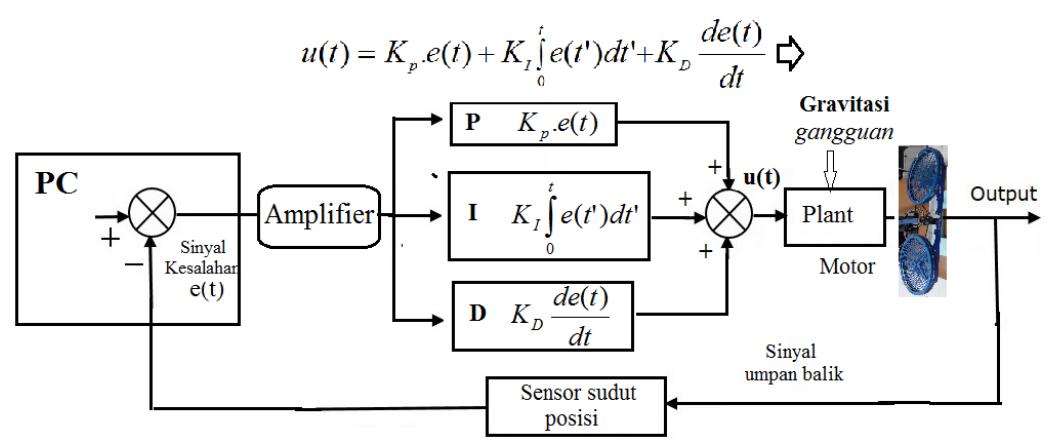
Gambar 4 Aplikasi metode PID pada eksperimen simulator bikopter
Karena eksperimen di lakukan di ruangan tertutup sehingga gangguan yang signifikan dipengaruhi oleh gaya gravitasi (g) terhadap massa (m) dan titik berat drone. Bentuk bikopter mempengaruhi lokasi titip berat sehingga kecepatan kedua rotor dikontrol untuk mengendalikan gaya angkatnya. Kondisi saat drone melayang setelah berhasil take off memenuhi hukum pertama newton yaitu resultan gaya (∑F) relatif nol sesuai persamaan (3) karena kecepatan drone relatif diam atau gergerak dengan kecepatan tetap saat melayang. Gaya angkat dari perputaran rotor (FT) akan relatif sama besarnya dengan gaya berat akibat gravitasi (W) pada persamaan (4).
\[\sum F = 0 \tag{3}\]
\[F_{T} = W \tag{4}\]
\[F_{TF} + F_{TB} = m.g \tag{5}\]
Terlihat pada persamaan (5) masing-masing gaya angkat baik dari motor depan (FTF) maupun motor belakang (FTB) berusaha menyeimbangkan terhadap gaya berat drone tersebut. Oleh karena itu, nilai koefisien gain PID (KP, KI, KD) pada persamaan (1) antara motor depan dan belakang pun akan saling menyeimbangkan agar dapat melayang stabil dan tinggal landas dengan berhasil.
3 Hasil dan Pembahasan
Perhitungan nilai koefisien gain PID menyesuaikan bentuk dan massa drone dengan optimalisasi menggunakan algoritma linear quadratic regulator (LQR) untuk mencapai posisi melayang dengan stabil, berikut nilai KP, KI, KD merujuk datasheet fasilitas 3 DOF helikopter [5].
Tabel 1 Nilai default koefisien PID
| KP | KI | KD | |||||
|---|---|---|---|---|---|---|---|
| VF | 37.67 | 13.21 | -11.49 | ||||
| VB | 37.67 | -13.21 | 11.49 | ||||
Terlihat pada Tabel 1 nilai tanda proportional sama antara motor depan dan belakang. Namun pada integral dan derivative berlainan tanda untuk menyeimbangkan masingmasing kedua rotor. Nilai koefisien gain PI (KP dan KI) divariasikan naik dan turun sebesar 1 untuk menginvestigasikan pengaruh pengontrolan PI terhadap kestabilan posisi tinggal landas drone.
Tabel 2 Variasi nilai koefisien PI
| PI1 | PI2 | PI3 | PI4 | PI5 | |||||
|---|---|---|---|---|---|---|---|---|---|
| KP | KI | KP | KI | KP | KI | KP | KI | KP | KI |
| 35.67 | 11.21 | 36.67 | 12.21 | 37.67 | 13.21 | 38.67 | 14.21 | 39.67 | 15.21 |
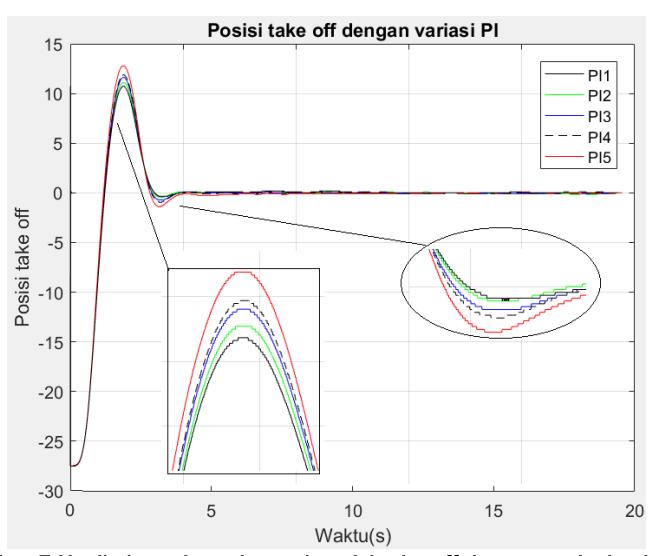
Gambar 5 Hasil eksperimen kontrol posisi take off dengan variasi gain PI
Pada Gambar 5, terlihat variasi koefisien gain PI mempengaruhi akurasi posisi tinggal landas drone. Semakin besar gain PI maka cenderung besar kesalahannya pada hasil pengukuran. Untuk performa variasi koefisien gain PD dapat dilihat di bawah ini :
Tabel 3 Variasi nilai koefisien PD
| PD1 | PD2 | PD3 | PD4 | PD5 | |||||
|---|---|---|---|---|---|---|---|---|---|
| KP | KD | KP | KD | KP | KD | KP | KD | KP | KD |
| 35.67 | -9.49 | 36.67 | -10.49 | 37.67 | -11.49 | 38.67 | -12.49 | 39.67 | -13.49 |
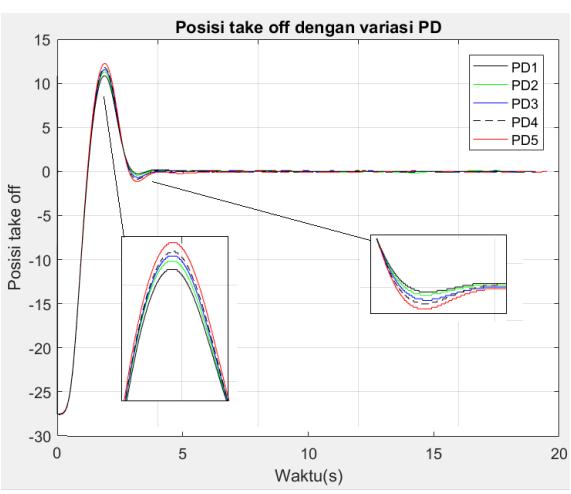
Gambar 6 Hasil eksperimen kontrol posisi take off dengan variasi gain PD
Variasi koefisien gain PD pun mempengaruhi keakuratan dalam pengendalian posisi take off drone bikopter pada Gambar 6. Untuk analisa semua koefisien PID maka nilai (KP, KI, KD) dapat divariasikan mengikuti Tabel 2 dan 3 kemudian diukur respon plant nya pada eksperimen.
Tabel 4 Variasi seluruh komponen gain PD
| PID1 | PID2 | PID3 | ||||||
| KP | KI | KD | KP | KI | KD | KP | KI | KD |
| 35.67 | 11.21 | -9.49 | 36.67 | 12.21 | -10.49 | 37.67 | 13.21 | -11.49 |
| PID4 | PID5 | |||||||
| KP | KI | KD | KP | KI | KD | |||
| 38.67 | 14.21 | -12.49 | 39.67 | 15.21 | -13.49 | |||
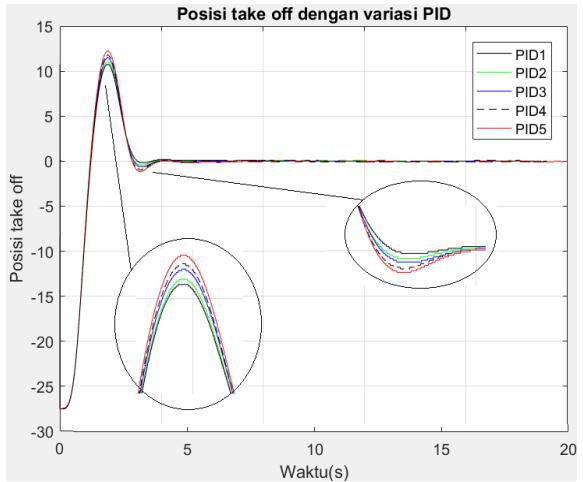
Gambar 7 Hasil eksperimen kontrol posisi take off dengan variasi gain PID
Walaupun respons posisi sedikit berbeda untuk ketiga grafik tersebut namun waktu untuk mencapai kestabilan posisi tinggal landas (posisi diinginkan pada 0°) sekitar 4 detik. Untuk analisa perbandingan kinerja terutama akurasi [8] antara variasi teknik kontrol PI, PD dan PID dapat diinvestigasi kesalahan maksimum (overshot) posisi yang ditimbulkannya pada hasil eksperimen.
Tabel 5 Kesalahan maksimum posisi dengan berbagai variasi kontrol PID
| Variasi | e(t)-PI | e(t)-PD | e(t)-PID | |
|---|---|---|---|---|
| 1 | 10.73 | 10.82 | 10.73 | |
| 2 | 11.08 | 11.26 | 11.00 | |
| 3 | 11.61 | 11.52 | 11.52 | |
| 4 | 11.88 | 11.79 | 11.79 | |
| 5 | 12.75 | 12.23 | 12.23 | |
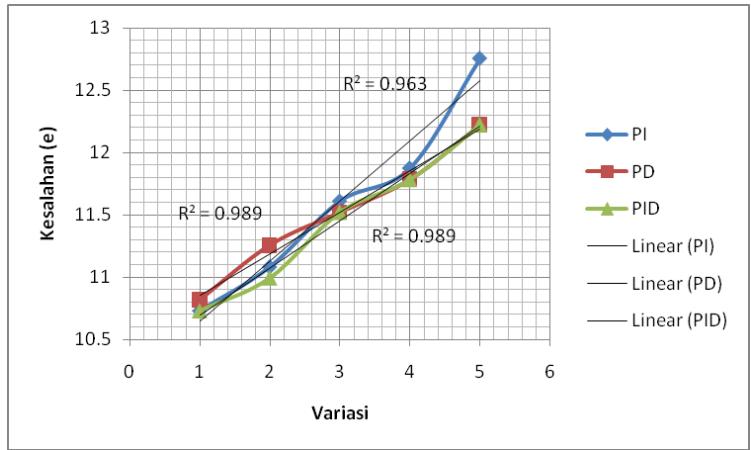
Gambar 8 Perbandingan kesalahan posisi terukur dengan variasi gain PID
Teknik kontrol dengan variasi koefisien gain PI memiliki akurasi paling buruk dan tidak linear sesuai Gambar 8. Variasi metode PD memiliki akurasi dan linearitas lebih baik daripada teknik kontrol PI. Di sisi lain, variasi seluruh komponen gain PID (KP, KI, KD) tidak hanya memiliki hasil kontrol posisi take off drone bikopter paling akurat tetapi juga linearitas respon terbaik. Oleh karena itu seluruh koefisien proporsionl, integral dan derivative pada formula (1) perlu diaplikasikan untuk mendapatkan hasil kontrol posisi drone yang optimal.
4 Kesimpulan dan Saran
Metode kontrol PID telah berhasil dalam mengontrol posisi tinggal landas drone bikopter dalam waktu sekitar 4 sekon. Semakin besar gain maka cenderung mengakibatkan semakin besar kesalahan. Variasi komponen gain PID memiliki pengaruh terhadap respon kesalahan plant tidak benar-benar linear khususnya variasi PI yang cenderung tidak linear. Teknik kontrol PD lebih baik daripada PI dalam pengendalian posisi take off drone. Seluruh koefisien gain proportional, integral dan derivatif sebaiknya digunakan karena memiliki akurasi dan linearitas terbaik.
5 Ucapan Terima Kasih
Terima kasih kepada manajemen Puslit Fisika LIPI yang telah menfasilitasi kegiatan ini. Kami juga mengucapkan terima kasih kepada Kemenristek-BRIN melalui program Insinas Riset Pratama yang mendukung penelitian ini.
6 Daftar Pustaka
- [1] H. Liu, G. Lu and Y. Zhong, Robust LQR Attitude Control of a 3-DOF Laboratory Helicopter for Aggressive Maneuvers, IEEE Transactions on Industrial Electronics, vol. 60, no. 10, pp. 4627-4636, 2013.
- [2] J. A. Prakosa, D. V. Samokhvalov, G. R. V. Ponce and F. Sh. Al-Mahturi, Speed Control of Brushless DC Motor for Quad Copter Drone Ground Test, 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Saint Petersburg and Moscow, Russia, pp. 644-648, 2019.
- [3] J. A. Prakosa and V.B. Vtorov, Experimental studies of adaptive control to stabilize the automatic unmanned mini quad rotor helicopter position, Journal of Advanced Research in Dynamical and Control Systems, vol. 11, no. 04, pp. 1983-1994, 2019.
- [4] E. Kurniawan, S. Suryadi and I. Affandi, Discrete-time Sliding Mode Controller for Multivariable System of 3 DOF Laboratory Helicopter, 2019 International Conference on Computer, Control, Informatics and its Applications (IC3INA), Tangerang, Indonesia, pp. 151-155, 2019.
- [5] Quanser Inc., laboratory guide 3 DOF Helicopter Experiment for MATLAB /Simulink Users, 2012
- [6] M. Zibny, E. Joelianto, S. Hadisupadmo, Perancangan Sistem Kontrol Ketinggian Baja Cair pada Proses Continuous Casting dengan Pengontrol PID Robas H∞. Jurnal Otomasi, Kontrol, dan Instrumentasi, Jan 13;7(2):103, 2017.
- [7] K.J. Åström, T. Hägglund, K.J. Astrom, Advanced PID control. Research Triangle Park, NC: ISA-The Instrumentation, Systems, and Automation Society, 2006
- [8] V. Firmansyah, S. Hadisupadmo, F. Elviya, S.R. Jannah, Pemanfaatan Sensor Ultrasonik Sebagai Alat Bantu Pembacaan Skala Volume Pada Bell Prover. Jurnal Otomasi, Kontrol, dan Instrumentasi. 12(1):1-8, 2020.
- [9] J.A. Prakosa, A.V. Putov, A.D. Stotckaia. Measurement Uncertainty of Closed Loop Control System for Water Flow Rate. In2019 XXII International Conference on Soft Computing and Measurements (SCM), pp. 60-63, 2019.