
Abstrak
Alat penetas telur ayam yang terdapat di pasaran secara komersil mayoritas mengggunakan lampu pijar sebagai sumber panas dengan pengaturan suhu menggunakan kendali on – off dan dapat terjadi fluktuasi suhu yang tidak terkendali. Untuk mengatasi hal tersebut maka dirancang metode kendali Proportional Integral (PI) dan anti windup yang di implementasikan untuk menghasilkan kendali suhu yang optimal pada prototipe simulator penetas telur ayam serta dirancang model transfer function dari modul AC light dimmer yang digunakan dalam simulasi untuk proses analisis dan perbandingan.
Algoritma kendali yang dirancang kemudian diimplementasikan pada sebuah simulator berupa prototipe simulator penetas telur ayam tersusun dari 2 buah node yang terhubung secara nirkabel. Node sensor akan mengolah data input menggunakan sensor suhu BME280 dan node aktuator akan mengolah data menggunakan algoritma kendali PI dan Kendali PI – anti windup dalam menentukan output Pulse Width Modulation (PWM) yang digunakan oleh modul AC light dimmer untuk mengatur intensitas cahaya pada lampu pijar. Perancangan pemodelan transfer function mengunakan System Identification Toolbox (SIT) dan perancangan simulasi menggunakan software Simulink Matrix Laboratory (MATLAB).
Berdasarkan hasil implementasi dan pengujian respon kendali PI dan kendali PI – anti windup, sistem yang dibangun menghasilkan karakteristik respon transient yang dapat menentukan metode kendali suhu yang lebih optimal. Kendali PI - anti windup memiliki respon transient yang cepat dengan nilai time constant sebesar 144,5 detik, rise time sebesar 226,5 detik, peak time sebesar 322,5 detik, settling time sebesar 280 detik dan delay time sebesar 98 detik, hasil tersebut menunjukan bahwa algoritma kendali PI – anti windup lebih baik dari kendali PI.
Kata kunci: Optimasi kendali suhu, PI – anti windup, respon transient, transfer function.
1. Pendahuluan
Dalam bidang peternakan khususnya pada peternakan ayam, masalah yang dihadapi oleh para peternak adalah proses penetasan telur ayam dalam jumlah banyak dan dalam waktu yang bersamaan. Kemampuan induk ayam dalam mengerami telurnya sangat terbatas, yaitu maksimal 10 butir telur setiap induk ayam [1]. Hal tersebut menjadi perhatian yang serius karena permintaan daging ayam di pasar sangat tinggi. Untuk menggantikan tugas induk ayam dalam menetaskan telurnya maka dibuat alat penetas telur ayam. Alat
penetas telur ayam dilengkapi dengan peralatan pendukung untuk mengatur kondisi lingkungan yang sesuai agar embrio dalam telur berkembang dengan optimal, sehingga telur dapat menetas [2].
Pada prinsipnya pada alat penetas telur ayam yang ada saat ini mayoritas perusahaan penyedia alat penetas telur menggunakan lampu pijar untuk menghasilkan suhu panas yang dimanfaatkan untuk proses penetasan telur [3]. Pengaturan suhunya hanya menggunakan kendali on–off pada lampu pijar dan tidak menutup kemungkinan terjadi fluktuasi suhu yang tidak terkendali pada alat penetas telur ayam [4]. Maka dibutuhkan alternatif lain dalam mengendalikan suhu yang sesuai dan lebih optimal yaitu mampu menjaga kestabilan suhu sesuai dengan nilai setpoint.
Untuk mengatasi hal tersebut, kendali suhu pada alat penetas telur ayam dapat dibuat beberapa metode kendali suhu otomatis. Dapat pula digunakan sensor pendeteksi suhu untuk mendapatkan nilai suhu aktual pada ruang tetas yang akan diproses menggunakan beberapa algoritma pengendali [5]. Algoritma pengendali tersebut diantaranya pengendali PI dan pengendali PI - anti windup yang diimplementasikan pada mikrokontroler dalam menetapkan nilai output suhu yang dapat menyesuaikan dengan nilai setpoint suhu yang ditentukan [6][7]. Dengan penggunaan pengendali Proportional (P) dan Integral (I) yang bertujuan untuk meningkatkan respon transient pada sistem kendali, serta metode anti-windup mampu mengatasi akumulasi kendali Integral dalam algoritma kendali PI [8][9][10].
Pada penelitian dirancang algoritma kendali suhu otomatis berbasis kendali PI dan kendali PI Anti Windup yang diimplementasikan pada sebuah prorotipe simulator penetas telur ayam sederhana. Serta dilakukan simulasi dari ketiga algoritma kendali tersebut kemudian proses analisis dan perbandingan respon kendali suhu hasil implementasi dan simulasi dalam menentukan algoritma kendali yang lebih optimal dan cocok digunakan pada prototipe simulator penetas telur ayam. Prototipe simulator penetas telur ayam dirancang menggunakan 2 buah node. Node sensor akan mendeteksi suhu secara kontinyu dan mengirim data tersebut melalui gelombang radio [11]. Kemudian node aktuator akan menerima data dan memprosesnya untuk menghasilkan output berupa nilai Pulse Width Modulation (PWM) yang berubah-ubah dan dimanfaatkan untuk mengatur intensitas cahaya pada lampu pijar sehingga suhu pada alat penetas telur akan terjaga kestabilannya dan sesuai dengan suhu yang ditentukan.
2. Metode
Perancangan kendali suhu pada prototipe simulator penetas telur ayam terbagi menjadi 3 yaitu perancangan prototipe simulator penetas telur ayam, perancangan algoritma kendali PI dan kendali PI - anti windup dan perancangan simulasi menggunakan simulink MATLAB.
2.1. Prototipe simulator penetas telur ayam
Dirancang menggunakan 2 buah node yang terhubung melalui jaringan nirkabel dapat dilihat pada Gambar 1, yaitu node sensor dan node aktuator yang diprogram dengan fungsi berbeda. Node sensor digunakan untuk mendeteksi nilai suhu sebagai data input sedangkan node aktuator digunakan untuk menghasilkan output berdasarkan data yang dikirim dari node sensor.
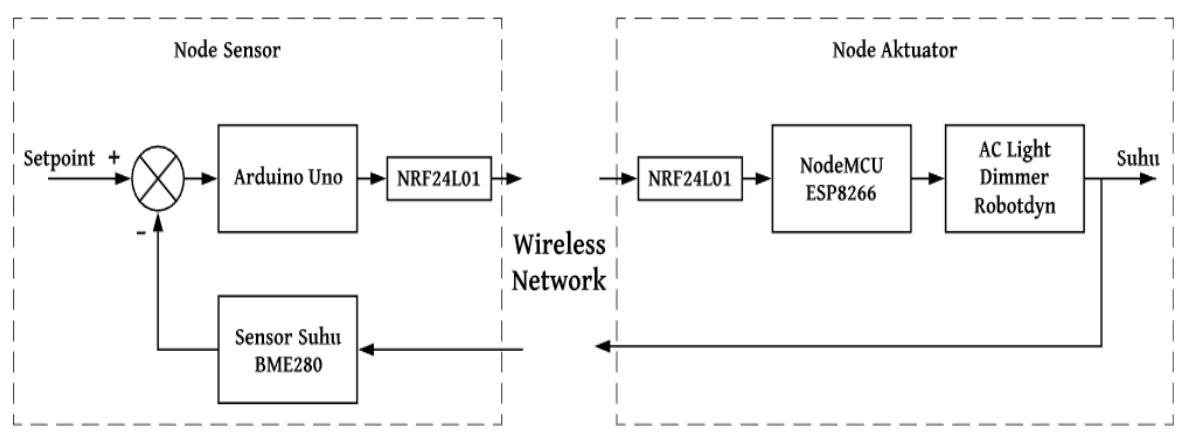
Gambar 1. Diagram blok prototipe simulator penetas telur ayam
Gambar 2. Diagram skematik prototipe simulator penetas telur ayam
Pada Gambar 2, node sensor ditugaskan khusus untuk mengolah data input oleh Arduino Uno dengan mendeteksi suhu aktual pada prototipe simulator penetas telur ayam menggunakan sensor BME280, menampilkan informasi pada LCD dan mengirimkan data input berupa suhu aktual dan suhu setpoint menuju node aktuator menggunakan NRF24L01 melalui gelombang radio. Node aktuator akan menerima dan mengolah data input dari node sensor menggunakan algoritma kendali yang diprogram pada NodeMCU ESP8266 untuk mendapatkan output berupa nilai PWM yang akan digunakan dalam mengatur intensitas cahaya lampu pijar oleh modul AC light dimmer.
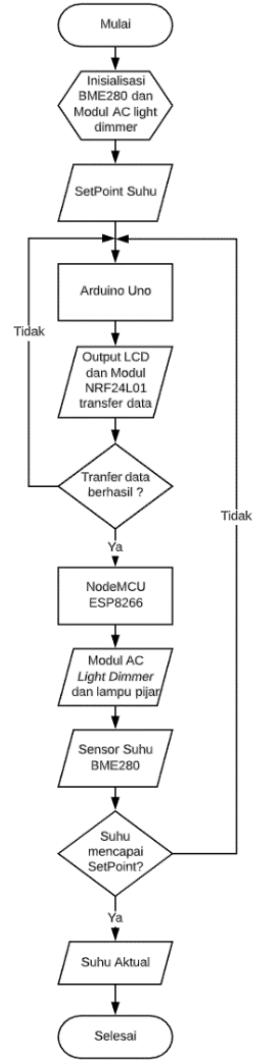
Gambar 3 Flowchart prototipe simulator penetas telur ayam
Berdasarkan Gambar 3, Pada NodeMCU ESP8266 akan dibuat 2 algoritma kendali yang berbeda yaitu kendali PI dan kendali PI – anti windup untuk dibandingkan kebutuhan kendali yang lebih cocok dan lebih optimal digunakan pada prototipe simulator penetas telur ayam diantara ketiga algoritma kendali tersebut.
2.2. Perancangan algoritma kendali suhu pada prototipe simulator penetas telur ayam
2.2.1. Kendali Open loop
Sistem kendali open loop dirancang untuk mengetahui respon dari kemampuan aktuator yaitu modul AC light dimmer dalam meningkatkan suhu pada plant. Data output kendali open loop akan melalui proses sampling, data yang di-sampling berupa suhu dan PWM dengan time sampling sebesar 0.5 detik. Data hasil sampling kendali open loop akan diolah untuk pemodelan aktuator yang akan digunakan dalam proses simulasi kendali FLC – PI, kendali PI dan kendali PI – anti windup.
Gambar 4. Diagram blok kendali open loop
2.2.2. Kendali PI
Sistem kendali suhu yang digunakan pada prototipe simulator penetas telur menggunakan kendali proportional dan integral. Input berupa error akan dikalkulasikan dengan nilai penguatan masing-masing kendali dan output dari kedua kendali P dan I akan dikonversi menjadi sinyal PWM yang akan digunakan oleh plant.
Gambar 5. Diagram blok kendali PI
Dapat dilihat pada Gambar 6, inisialisasi setpoint dilakukan untuk mencari nilai error hasil selisih antara suhu setpoint dikurangi suhu hasil deteksi. Input error akan diolah menggunakan algoritma kendali PI dalam menghasilkan output berupa nilai PWM yang akan digunakan oleh modul AC light dimmer untuk mengatur intensitas cahaya lampu pijar. Cahaya yang dihasilkan lampu pijar akan meningkatkan suhu udara hingga mencapai suhu setpoint.
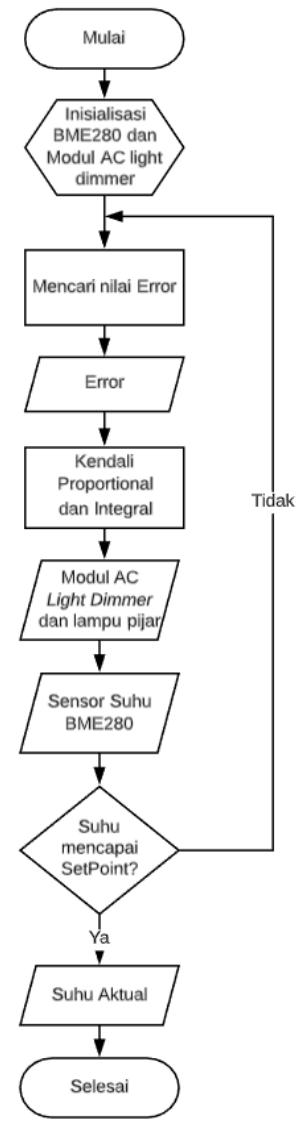
Gambar 6. Flowchart kendali PI
2.2.3. Kendali PI – Anti Windup.
Sistem kendali suhu yang digunakan pada prototipe simulator penetas telur menggunakan kendali proportional dan integral untuk menghasilkan output berupa nilai PWM. Hasil output pada sistem kendali PI berupa nilai PWM terbatasi pada nilai 0 – 255 dan dapat terjadi saturasi, dengan tambahan anti windup sistem kendali PI dapat mengatasi kodisi saturasi nilai PWM pada modul AC light dimmer. Metode yang digunakan pada kendali PI – anti windup menggunakan metode clamping yaitu dengan kontrol on/off pada kendali integral dapat dilihat pada Gambar 7.
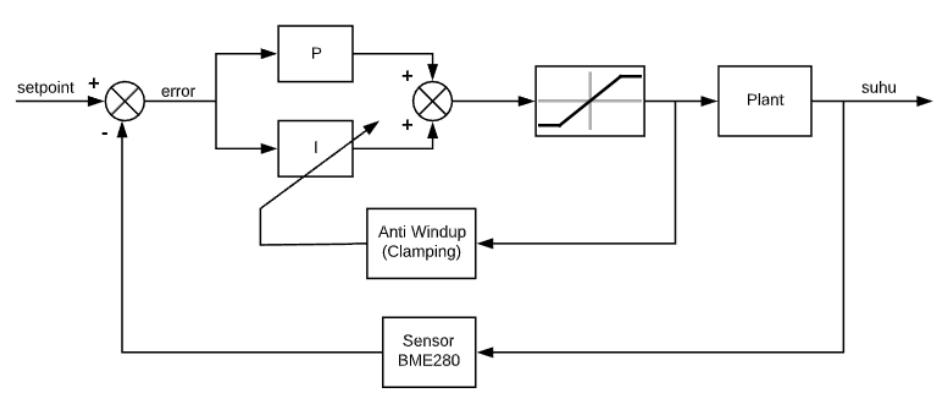
Gambar 7. Diagram blok kendali PI – anti windup
Proses kendali suhu menggunakan sistem kendali PI – anti windup dapat dijelaskan berdasarkan Gambar 8 (a), input error akan diproses menggunakan kendali PI – anti windup untuk menghasilkan output berupa nilai PWM. Sinyal PWM akan dimanfaatkan untuk mengatur intensitas cahaya pada lampu pijar oleh modul AC light dimmer, kemudian cahaya lampu pijar akan meningkatkan suhu udara pada prototipe simulator penetas telur hingga mencapai setpoint. Berdasarkan Gambar 8 (b), kendali integral akan dikontrol on / off tergantung status clamp atau tidak clamp pada kendali anti windup. Proses clamping ditentukan berdasarkan 2 kondisi yaitu output saturasi dan sign error sama dengan sign output kendali PI.
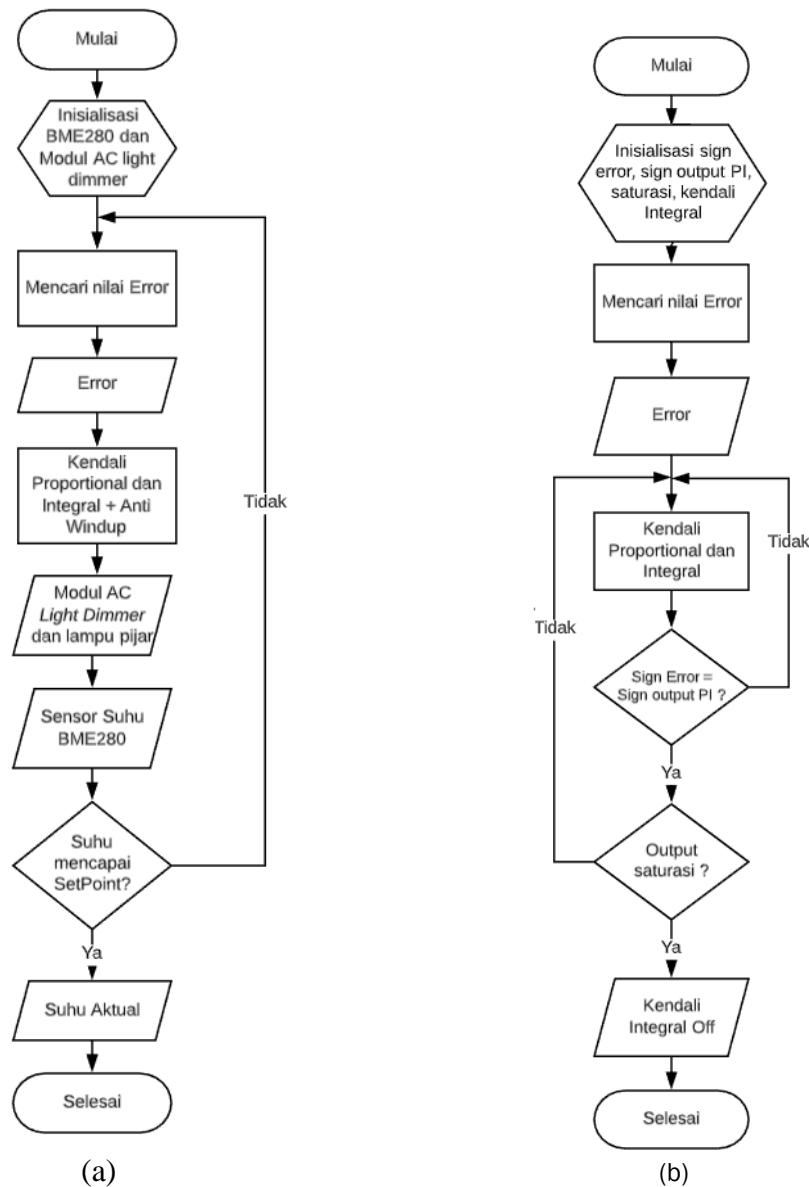
Gambar 8. Flowchart (a) kendali PI – anti windup dan (b) anti – windup metode clamping
2.3. Perancangan Software
Perancangan software dilakukan menggunakan system identification toolbox (SIT) yang digunakan untuk membuat model matematis berupa transfer function dari prototipe simulator penetas telur yang dirancang dan simulink digunakan untuk simulasi sistem kendali dengan algoritma FLC – PI dan PI – anti windup.
2.3.1. System Identification Toolbox (SIT)
SIT digunakan untuk menentukan model matematis berupa transfer function dari aktuator modul AC light dimmer yang terdapat pada prototipe simulator penetas telur ayam. Persamaan transfer function akan digunakan untuk simulasi sistem kendali suhu dengan algoritma kendali FLC – PI, kendali PI dan kendali PI – anti windup pada simulink.
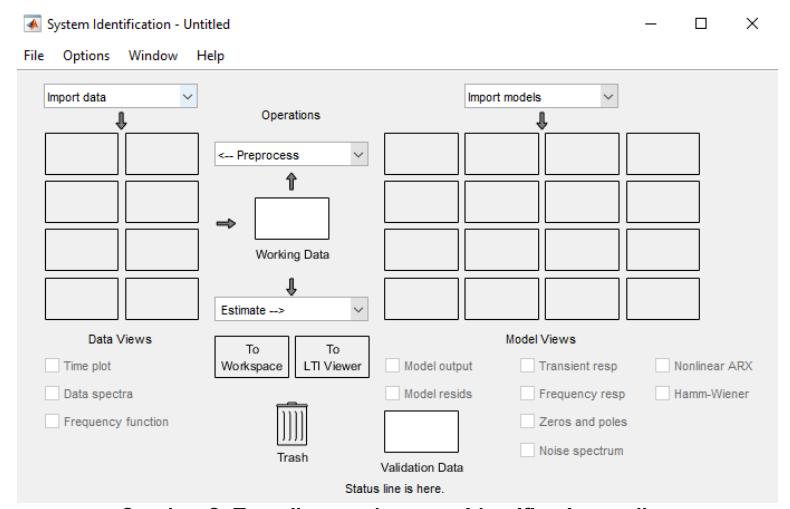
Gambar 9. Tampilan awal system identification toolbox
Gambar 10. Parameter transfer function hasil pemodelan
2.3.2. Simulink
Simulasi pada software simulink MATLAB dilakukan untuk menghasilkan data yang akan digunakan sebagai pembanding dengan implementasi prototipe simulator penetas telur ayam yang dirancang.
a. Simulasi Kendali Open Loop Prototipe simulator Penetas Telur Ayam, simulasi kendali open loop dilakukan untuk memvalidasi kesesuaian respon sistem dari persamaan transfer function hasil pemodelan dengan aktuator modul AC light dimmer sebenarnya.
Gambar 11. Simulasi kendali open loop
Pada Gambar 11, input pada simulasi kendali open loop berupa yaitu berupa sinyal PWM, persamaan transfer function ditambahkan blok gain sebesar 0.39 untuk proses validasi kesesuaian hasil simulasi dengan implementasi dan nilai constant sebagai suhu awal sebesar 28°C untuk mendapatkan batasan suhu yang sesuai dengan implementasi prototipe simulator penetas telur ayam.
b. Simulasi Kendali PI, simulasi kendali PI dirancang untuk mengetahui respon sistem hasil dari output kendali PI biasa tanpa menambahkan anti windup.
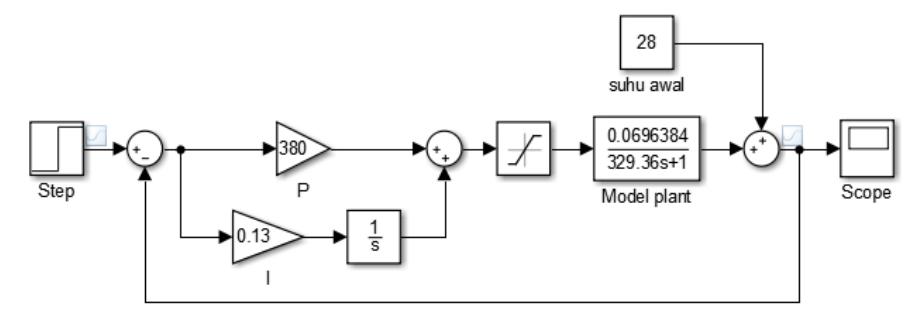
Gambar 12. Simulasi kendali PI
Berdasarkan Gambar 12, step input berfungsi sebagai suhu setpoint, sum pertama digunakan untuk menentukan nilai error hasil selisih dari suhu setpoint dengan suhu awal yang dihasilkan dari blok constant, nilai error akan diproses dengan kendali PI dengan penguatan proportional sebesar 380 dan penguatan integral sebesar 0.13. Output kendali P dan I akan dijumlahkan dan dikonversi menjadi sinyal PWM dengan range 0 - 255 lalu diteruskan menuju blok transfer function dan menghasilkan output kendali suhu.
c. Simulasi Kendali PI – Anti Windup, simulasi kendali PI – anti windup dirancang mampu mengatasi kondisi saturasi pada aktuator. Menggunakan model transfer function yang sama dengan algoritma kendali suhu yang lain namun komponen pendukung pada algoritma kendali suhu PI – anti windup lebih banyak karena akan digunakan untuk membuat anti windup pada kendali PI.
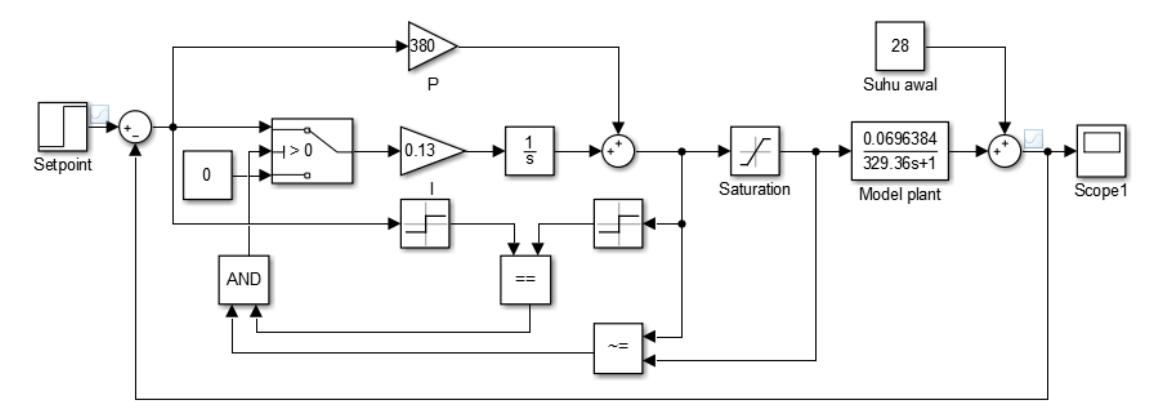
Gambar 13. Simulasi kendali PI – anti windup
Berdasarkan Gambar 13, step input berfungsi sebagai suhu setpoint, sum pertama digunakan untuk menentukan nilai error hasil selisih dari suhu setpoint dengan suhu awal yang dihasilkan dari blok constant, nilai error akan diproses dengan kendali PI dengan penguatan proportional sebesar 380 dan penguatan integral sebesar 0.13. Blok switch digunakan untuk proses clamping pada kendali PI – anti windup. Proses clamping ditentukan berdasarkan 2 kondisi yaitu output saturasi dan sign error sama dengan sign output kendali PI.
2.4. Perancangan Hardware
Perancangan hardware terdiri dari perancangan sebuah plant berupa prototipe simulator penetas telur ayam, rangkaian pengendali yang terdiri dari node sensor dan node aktuator dan mendesain layout PCB untuk shield Arduino Uno dan NodeMCU ESP8266 yang berguna untuk mengurangi penggunaan kabel jumper yang banyak.
2.4.1. Desain Prototipe simulator Penetas Telur Ayam
Untuk membuat sebuah prototipe simulator penetas telur ayam, digunakan material impraboard berbahan dasar plastik yang dibuat pola seperti Gambar 14 berdimensi 40 cm x 40 cm x 40,9 cm dengan ruangan tertutup seperti Gambar 15, berukuran 30 cm x 30 cm x 30 cm.
Gambar 14. Desain prototipe simulator penetasan telur ayam
Gambar 15. Desain ruangan tertutup
Skema penempatan rangkaian pengendali dapat dilihat pada Gambar 16, node sensor ditempatkan di atas ruang tertutup dengan penempatan sensor BME280 berjarak 5 cm dari dasar prototipe simulator penetas telur ayam sedangkan node aktuator ditempatkan dibagian bawah.
Gambar 16. Penempatan komponen pada plant
Pada prototipe simulator penetas telur ayam dibuat ruang kecil berukuran 30cm x 10 cm x 5 cm yang dapat terlihat di pojok kanan bawah pada Gambar 16, selain untuk penempatan node aktuator, digunakan juga sebagai jalur power supply yang terdiri dari sumber AC 220V yang digunakan modul AC light dimmer untuk lampu pijar dan jalur power untuk rangkaian kedua node dan desain bagian belakang prototipe simulator penetas telur ayam dapat dilihat pada Gambar 17.
Gambar 17. Jalur power supply prototipe simulator penetas telur ayam
2.4.2. Diagram Wiring Node Sensor
Rangkaian node sensor tersusun dari Arduino Uno, sensor BME280, modul NRF24L01 dan LCD seperti Gambar 18. Sensor BME280 dan LCD dirangkai pada Arduino dengan susunan pin pada Tabel 1 dan Tabel 3. Kedua komponen ini sama-sama menggunakan input tegangan 5VDC dan juga menggunakan komunikasi I2C. Modul NRF24L01 membutuhkan tegangan input 3.3VDC untuk dapat beroperasi dan konfigurasi pin yang digunakan dapat dilihat pada Tabel 2. Rangkaian node sensor dibuat layout PCB yang digunakan untuk shield Arduino Uno seperti pada Gambar 19.
Gambar 18. Wiring diagram node sensor
Tabel 1. Konfigurasi pin Arduino Uno dengan BME280
| Arduino Uno | BME280 |
|---|---|
| VCC 5V | VCC |
| GND | GND |
| A4 | SDA |
| A5 | SCL |
Tabel 2. Konfigurasi pin Arduino Uno dengan NRF24L01
| Arduino Uno | NRF24L01 | |
|---|---|---|
| VCC 3.3V | VCC | |
| GND | GND | |
| 7 | CE | |
| 8 | CSN | |
| 11 | MOSI | |
| 12 | MISO | |
| 13 | SCK | |
Tabel 3. Konfigurasi pin Arduino Uno dengan LCD I2C
| Arduino Uno | LCD I2C | |
|---|---|---|
| VCC 5V | VCC | |
| GND | GND | |
| SDA | SDA | |
| SCL | SCL | |
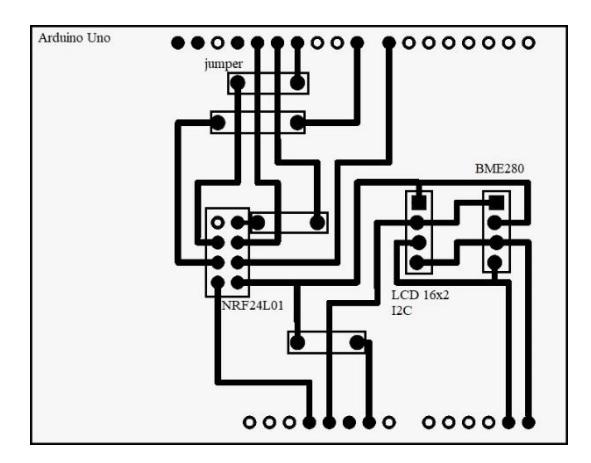
Gambar 19. Layout PCB node sensor shield Arduino Uno
2.4.3. Diagram Wiring Node Aktuator
Rangkaian node aktuator terdapat NodeMCU ESP8266, modul NRF24L01, modul AC light dimmer dan rangkaian lampu pijar AC. Modul NRF24L01 dan modul AC light dimmer dirangkai pada NodeMCU ESP8266 dengan konfigurasi pin pada Tabel 4. dan Tabel 5. Pada modul AC light dimmer terdapat 2 terminal keluaran yaitu AC input dan load yang dirangkai seperti pada Gambar 20. Rangkaian node aktuator dibuat layout PCB yang digunakan untuk shield NodeMCU ESP8266 seperti pada Gambar 21.
Gambar 20.Wiring diagram node aktuator
Tabel 4. Konfigurasi pin NodeMCU ESP8266 dengan NRF24L01
| NodeMCU ESP8266 | NRF24L01 | |||
| VCC 3.3V | VCC | |||
| GND | GND | |||
| D4 | CE | |||
| D5 | SCK | |||
| D6 | MISO | |||
| D7 | MOSI | |||
| D8 | CSN | |||
Tabel 5. Konfigurasi pin NodeMCU ESP8266dengan modul AC light dimmer
| NodeMCU ESP8266 | Modul AC light dimmer |
|---|---|
| VCC 3.3V | VCC |
| GND | GND |
| D1 | PWM |
| D2 | ZC |
Gambar 21. Layout PCB node aktuator shield NodeMCU ESP8266
3. Hasil dan Pembahasan
3.1. Hasil
3.1.1. Pengujian Respon Kendali Open Loop Prototipe Simulator Penetas Telur Ayam
Pengujian respon kendali open loop pada prototipe simulator penetas telur ayam dilakukan untuk mengetahui respon peningkatan suhu yang dihasilkan oleh lampu pijar dari modul AC light dimmer saat diberi input berupa sinyal PWM.
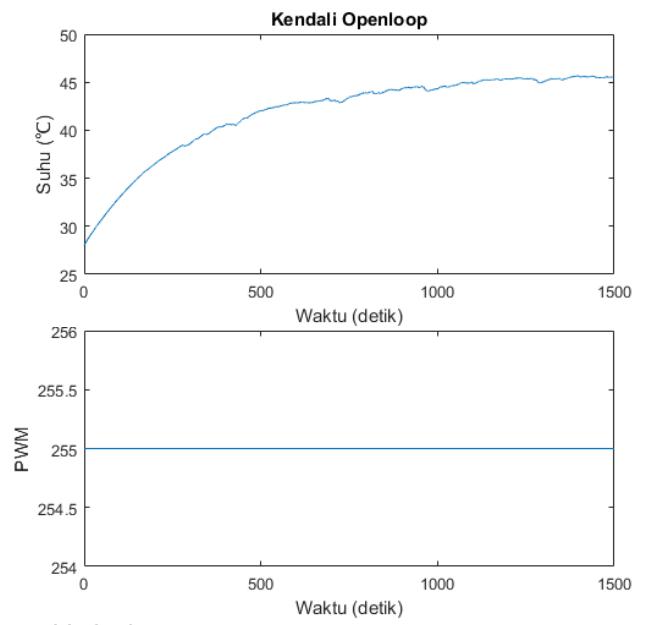
Gambar 22. Grafik respon suhu dan PWM implementasi kendali open loop
Data hasil sampling pengujian respon kendali open loop pada prototipe simulator penetas telur ayam yang terdapat pada Gambar 22, diproses menggunakan system identification toolbox (SIT) dan menghasilkan model matematis dengan persamaan transfer function sebagai berikut :
\[G(s) = \frac{0.17856}{1 + 329.36s} \tag{1}\]
Setelah mendapatkan persamaan transfer function dari proses pemodelan dilakukan simulasi kendali open loop pada simulink MATLAB. Hasil simulasi kendali open loop dapat dilihat pada Gambar 23 dan jika dibandingkan respon kendali hasil simulasi dengan impementasi akan terlihat grafik seperti pada Gambar 24.
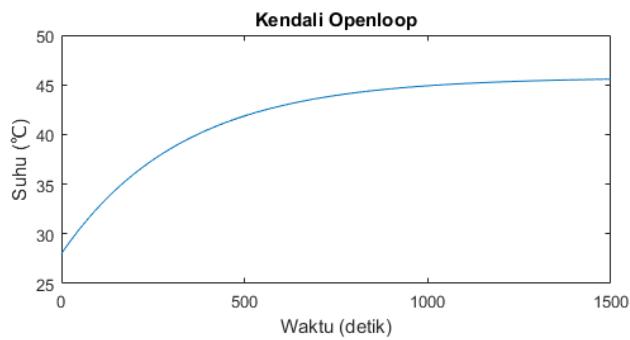
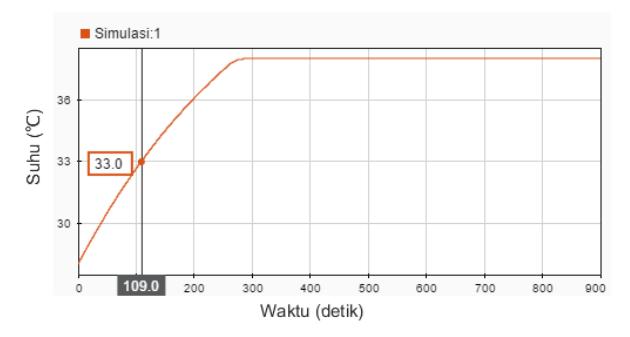
Gambar 23. Grafik respon suhu simulasi kendali open loop
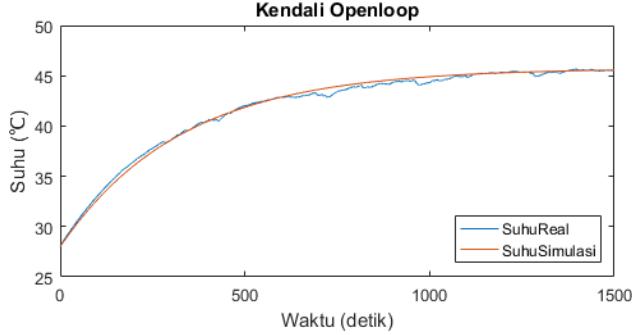
Gambar 24.Grafik respon suhu implementasi dan simulasi kendali open loop
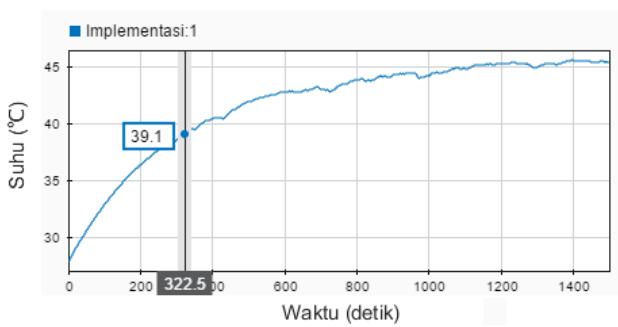
Gambar 25. Time constant implementasi kendali open loop
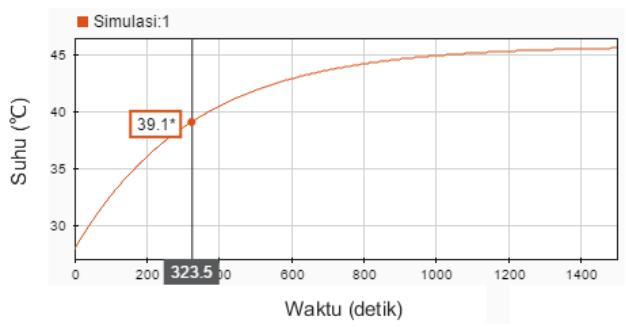
Gambar 26. Time constant simulasi kendali open loop
Berdasarkan Gambar 22 dan Gambar 23, hasil pengujian diperoleh bahwa respon kendali open loop prototipe simulator penetas telur ayam dapat mencapai suhu 45,6°C baik pada implementasi atau simulasi ketika diberi input sinyal PWM sebesar 255. Pada Gambar 25 dan Gambar 26 terlihat time constant sebesar 322,5 detik pada implementasi dan 323,5 detik pada simulasi. Untuk nilai time constant dapat diperoleh dari waktu respon saat output yang dihasilkan mencapai 63,2% dari nilai maksimum dengan nilai 39,12 °C.
Time constant yang dihasilkan tidak memiliki perbedaan secara signifikan begitu juga dengan grafik yang dapat dilihat pada Gambar 24, output suhu pada kendali open loop baik implementasi atau simulasi terlihat bentuk respon yang tidak jauh berbeda. Dengan hasil tersebut, maka dapat dikatakan model plant yang digunakan dianggap dapat menjadi representasi dari modul AC light dimmer sebenarnya.
3.1.2. Pengujian Respon Kendali PI
Pada pengujian respon kendali PI dilakukan dengan membandingkan data hasil pengujian simulasi dengan data hasil pengujian implementasi. Pengujian simulasi respon kendali PI dan menghasilkan respon sistem seperti pada Gambar 27 berikut.
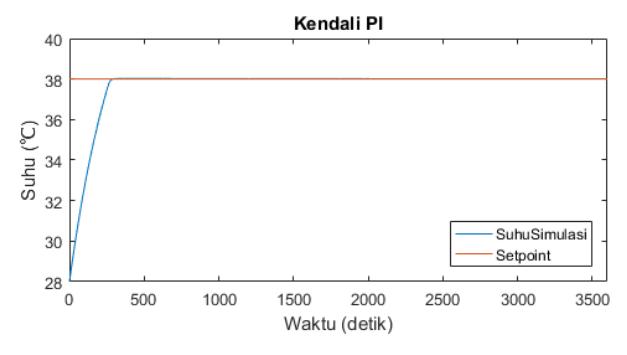
Gambar 27. Grafik respon suhu simulasi kendali PI
Respon transient simulasi kendali kendali PI yang terdapat pada Gambar 27, merupakan tipe over damped response dengan output suhu mencapai 38,02°C terdapat overshoot sebesar 0,2% dan karakteristik respon transient yang dapat diukur berdasarkan grafik output suhu antara lain; time constant, rise time, peak time, settling time dan delay time.
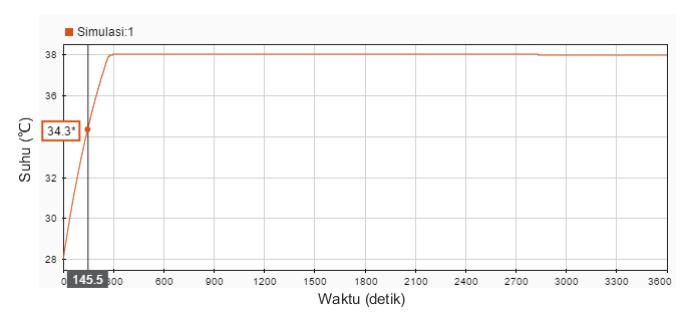
Gambar 28. Time constant (Ct) simulasi kendali PI
Gambar 29. Rise time simulasi kendali PI
Gambar 30. Peak time simulasi kendali PI
Gambar 31. Settling time simulasi kendali PI
Gambar 32. Delay time simulasi kendali PI
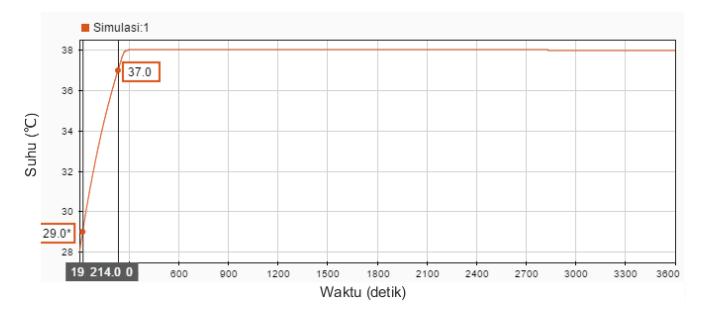
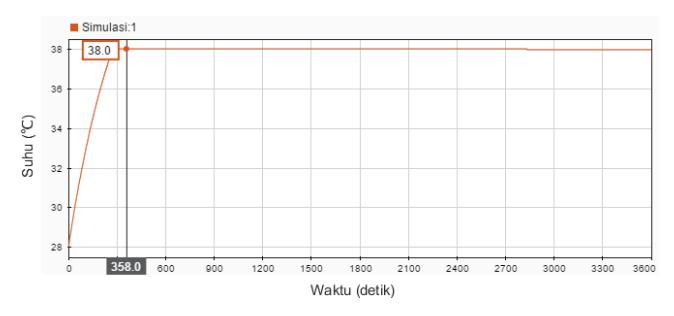
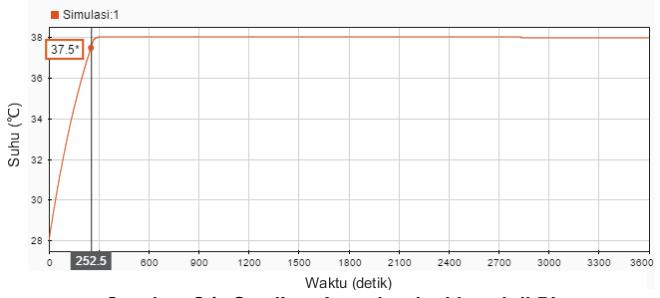
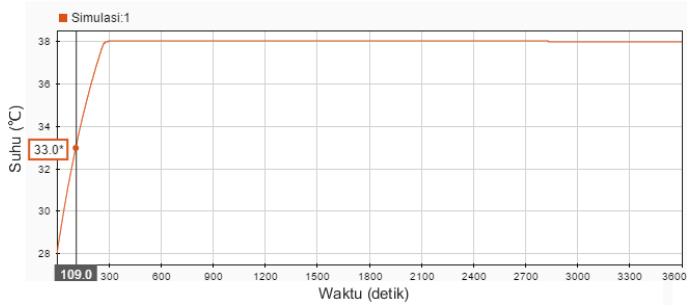
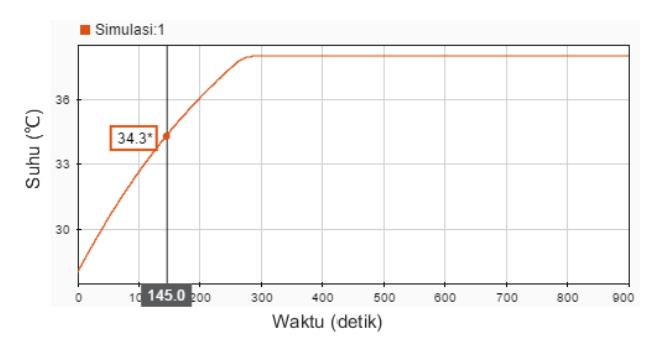
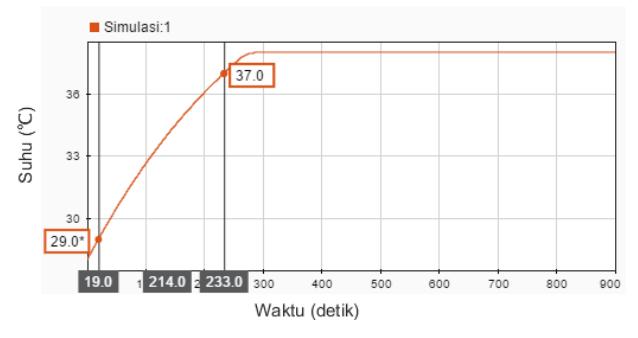
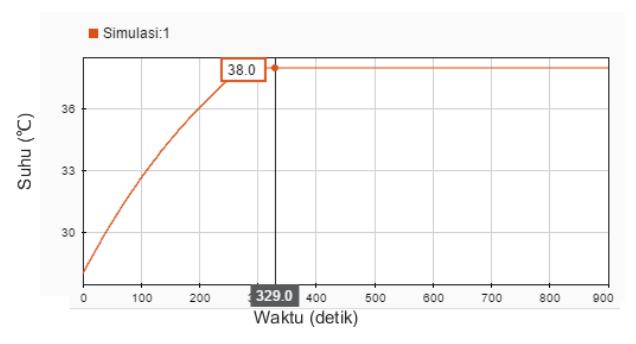
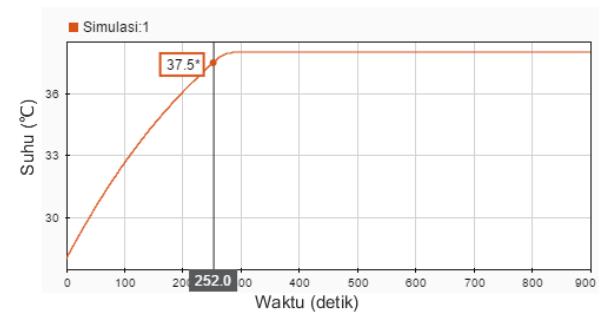
Berdasarkan Gambar 28 sampai dengan Gambar 32 karakteristik respon transient pada simulasi kendali PI memiliki nilai time constant sebesar 145,5 detik, rise time (10% - 90%) sebesar 214 detik, peak time sebesar 358 detik, settling time (5%) sebesar 252,5 detik dan delay time sebesar 109 detik.
Kemudian dilakukan pengujian respon kendali PI pada implementasi prototipe simulator penetas telur ayam menghasilkan respon yang dapat dilihat pada Gambar 33 berikut.
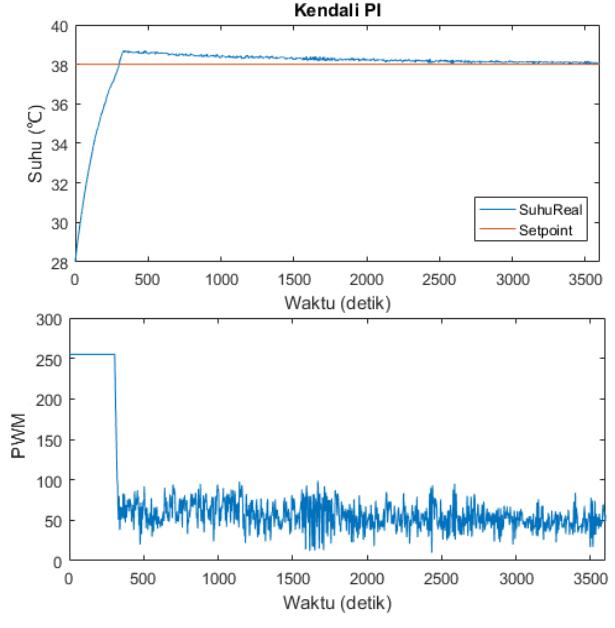
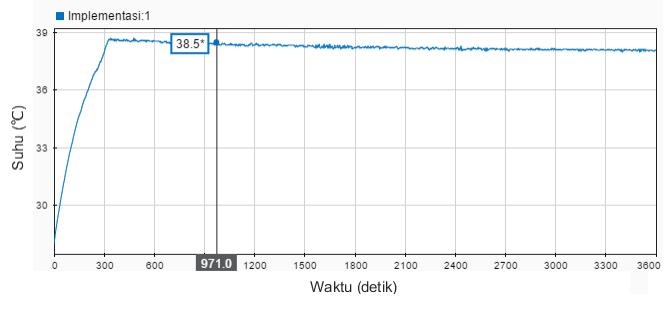
Gambar 33. Grafik respon suhu dan PWM implemetasi kendali PI
Dilihat dari bentuk respon transient pada Gambar 33, output suhu pada implementasi kendali PI merupakan tipe over damped response karena output suhu melewati setpoint yang ditentukan yaitu mencapai maksimal 38,71°C sehingga terjadi overshoot sebesar 7,1% dengan karakteristik respon transient sebagai berikut.
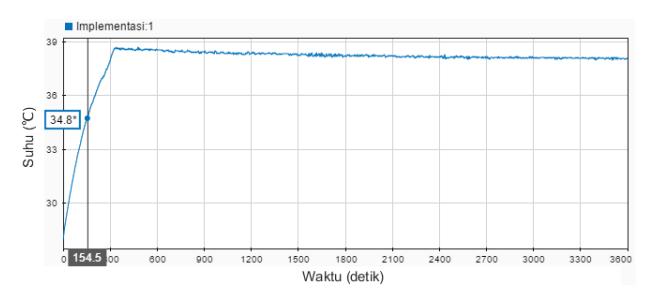
Gambar 34. Time constant implementasi kendali PI
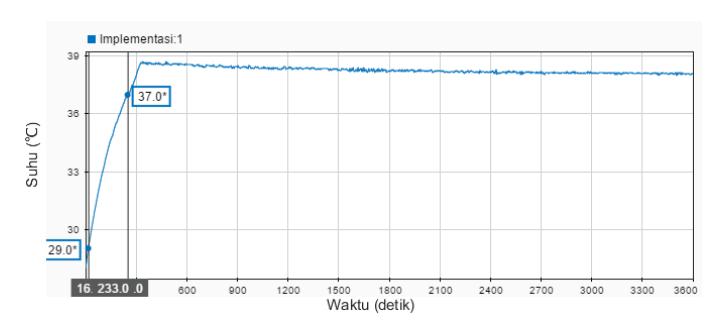
Gambar 35. Rise time implementasi kendali PI
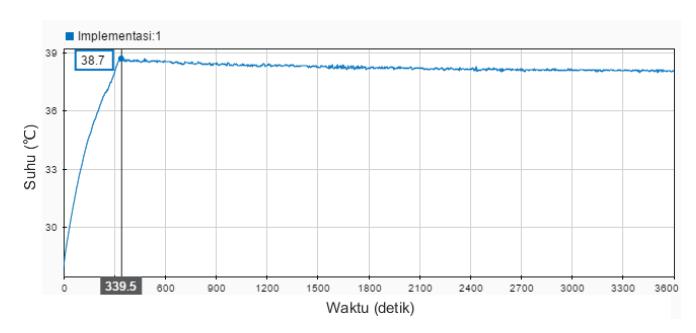
Gambar 36. Peak time implementasi kendali PI
Gambar 37. Settling time implementasi kendali PI
Gambar 38. Delay time implementasi kendali PI
Berdasarkan Gambar 34 sampai dengan Gambar 38 karakteristik respon transient pada implementasi kendali PI memiliki nilai time constant sebesar 154,5 detik, rise time (10% - 90%) sebesar 233 detik, peak time sebesar 339,5 detik, settling time (5%) sebesar 971 detik dan delay time sebesar 101,5 detik. Dan jika dibandingkan respon kendali pada simulasi dengan implementasi kendali PI akan terlihat seperti pada Gambar 39 berikut.
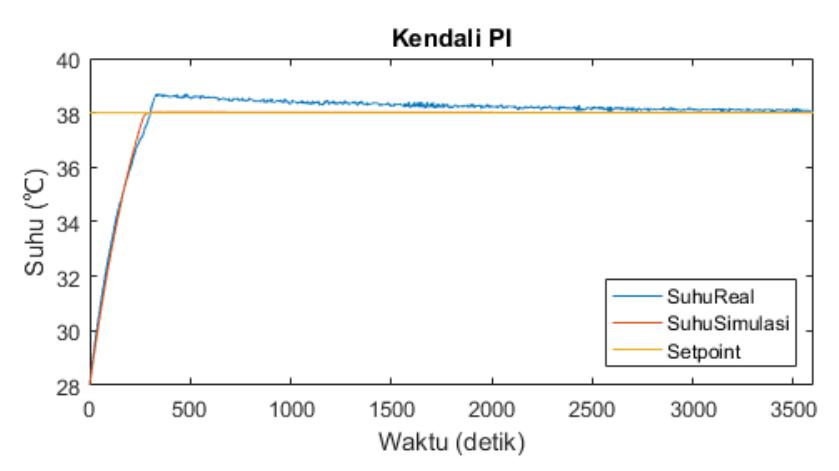
Gambar 39. Grafik respon suhu simulasi dan implementasi kendali PI
Hasil perbandingan karakteristik respon transient pada kendali PI simulasi dan implementasi dapat dilihat pada Tabel 6 berikut.
| Time constant | Rise time | Peak time | Settling time | Delay time | |
|---|---|---|---|---|---|
| Simulasi | 145,5 detik | 214 detik | 358 detik | 252,5 detik | 109 detik |
| Implementasi | 154,5 detik | 233 detik | 339,5 detik | 971 detik | 101,5 detik |
Tabel 6. Karakteristik respon transient kendali PI
3.1.3. Pengujian Respon Kendali PI – Anti Windup
Pada pengujian respon kendali PI – anti windup dilakukan dengan membandingkan data hasil pengujian implementasi dengan data hasil pengujian simulasi. Pengujian simulasi respon kendali PI – anti windup dan menghasilkan respon sistem seperti pada Gambar 40 berikut.
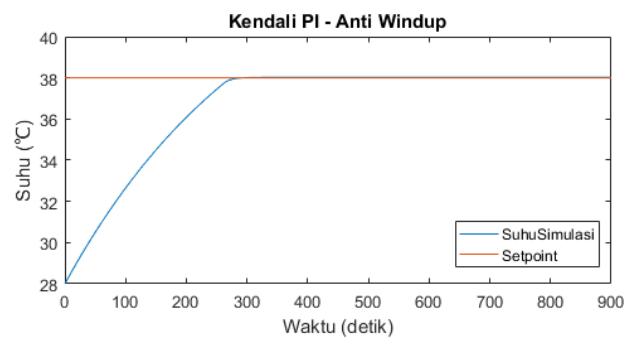
Gambar 40. Grafik respon suhu simulasi kendali PI – anti windup
Respon transient simulasi kendali kendali PI – anti windup yang terdapat pada Gambar 40, merupakan tipe over damped response dengan output suhu mencapai 38,02°C terdapat overshoot sebesar 0,2% dan karakteristik respon transient yang dapat diukur berdasarkan grafik output suhu antara lain; time constant, rise time, peak time, settling time dan delay time.
Gambar 41. Time constant simulasi kendali PI – anti windup
Gambar 42. Rise time simulasi kendali PI – anti windup
Gambar 43. Peak time simulasi kendali PI – anti windup
Gambar 44. Settling time simulasi kendali PI – anti windup
Gambar 45. Delay time simulasi kendali PI – anti windup
Berdasarkan Gambar 41 sampai dengan Gambar 45 karakteristik respon transient pada simulasi kendali PI – anti windup memiliki nilai time constant sebesar 145 detik, rise time (10% - 90%) sebesar 214 detik, peak time sebesar 329 detik, settling time (5% ) sebesar 252 detik dan delay time sebesar 109 detik.
Kemudian dilakukan Pengujian respon kendali PI – anti windup pada implementasi prototipe simulator penetas telur ayam menghasilkan respon yang dapat dilihat pada Gambar 46 berikut.
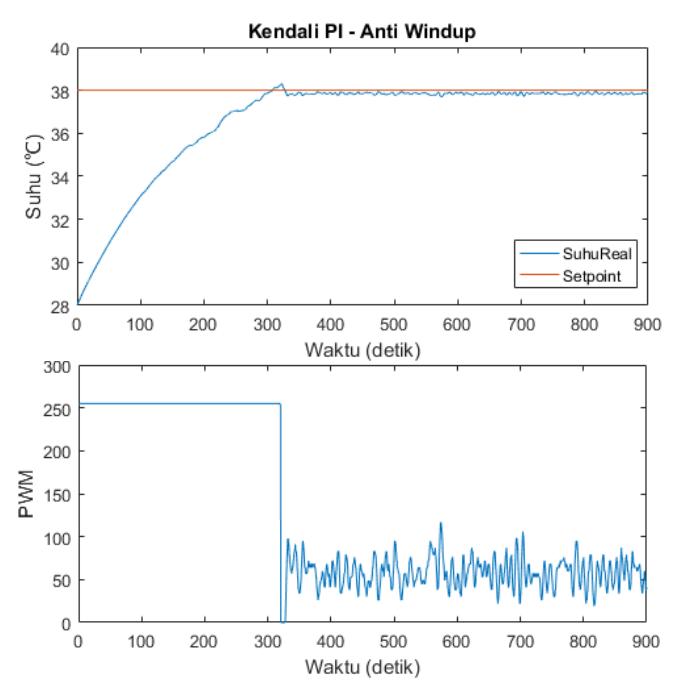
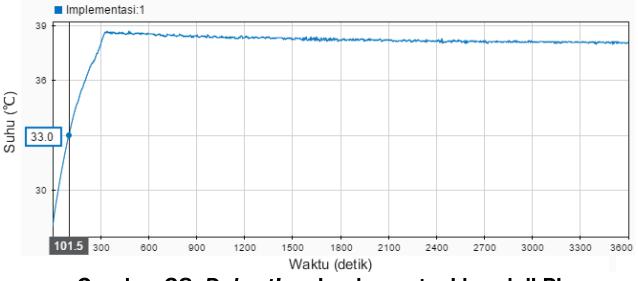
Gambar 46. Grafik respon suhu dan PWM implemetasi kendali PI – anti windup
Dilihat dari bentuk respon transient pada Gambar 46, output suhu pada implementasi kendali PI – anti windup merupakan tipe over damped response karena output suhu melewati setpoint yang ditentukan yaitu mencapai suhu 38,3°C sehingga terjadi overshoot sebesar 3% dengan karakteristik respon transient sebagai berikut.
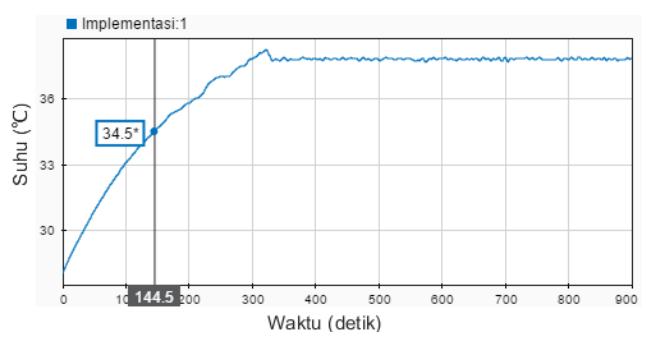
Gambar 47. Time constant implementasi kendali PI – anti windup
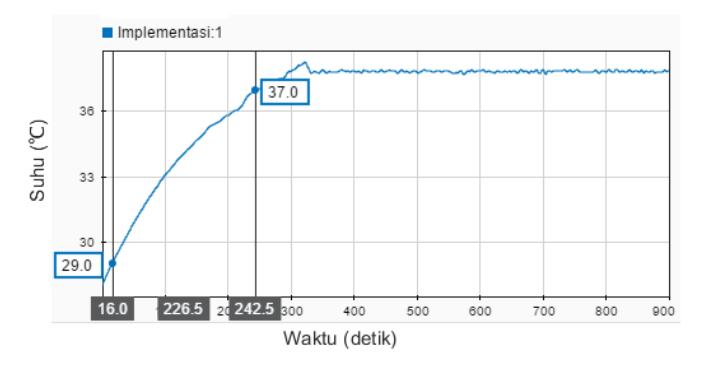
Gambar 48. Rise time implementasi kendali PI – anti windup
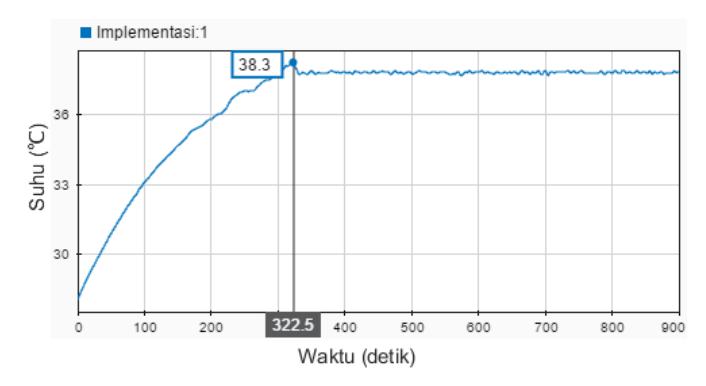
Gambar 49. Peak time implementasi kendali PI – anti windup
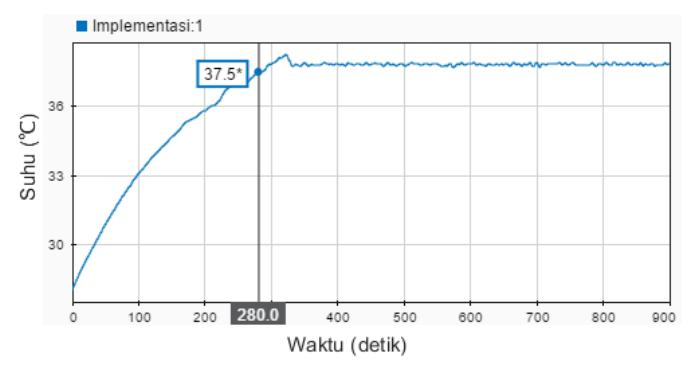
Gambar 50. Settling time implementasi kendali PI – anti windup
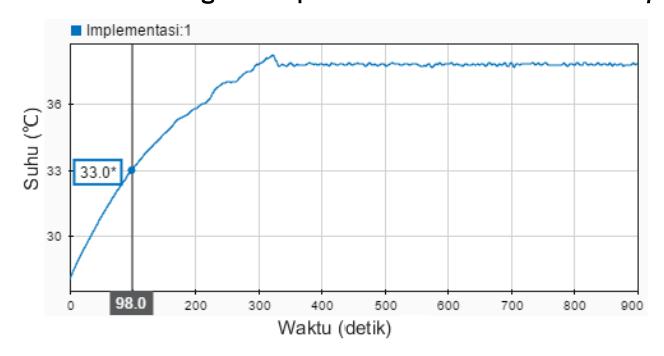
Gambar 51. Delay time implementasi kendali PI – anti windup
Berdasarkan Gambar 47 sampai dengan Gambar 51 karakteristik respon transient pada implementasi kendali PI – anti windup memiliki nilai time constant sebesar 144,5 detik, rise time (10% - 90%) sebesar 226,5 detik, peak time sebesar 322,5 detik, settling time (5%) sebesar 280 detik dan delay time sebesar 98 detik. Dan jika dibandingkan respon kendali pada simulasi dengan implementasi kendali PI – anti windup akan terlihat seperti pada Gambar 52.
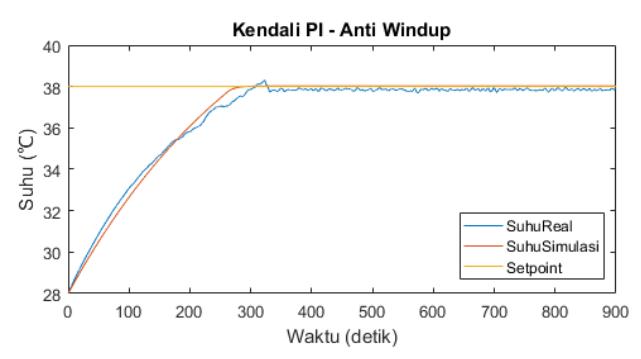
Gambar 52. Grafik respon suhu simulasi dan implementasi kendali PI – anti windup
Hasil perbandingan karakteristik respon transient pada kendali PI – anti windup simulasi dan implementasi dapat dilihat pada Tabel 7.
Tabel 7. Karakteristik respon transient kendali PI – anti windup
| Time constant | Rise time | Peak time | Settling time | Delay time | |
| Simulasi | 145 detik | 214 detik | 329 detik | 252 detik | 109 detik |
| Implementasi | 144,5 detik | 226,5 detik | 322,5 detik | 280 detik | 98 detik |
3.2. Pembahasan
Dalam menentukan algoritma kendali suhu yang paling optimal diantara kendali PI dan kendali PI – anti windup yang sudah dilakukan pengujian dapat dilihat dari karakteristik respon transient dari kedua algoritma kendali suhu tersebut.
Gambar 53. Kendali suhu pada prototipe simulator penetas telur ayam menggunakan lampu pijar
Untuk prototipe simulator penetas telur ayam yang terdapat pada Gambar 53, parameter respon kendali suhu yang dibutuhkan yaitu memiliki respon cepat, stabil pada suhu setpoint dan tidak terdapat lonjakan suhu yang besar. Maka dari itu, dilakukan perbandingan respon kendali suhu dari ketiga algoritma tersebut yang dapat dilihat pada Gambar 54.
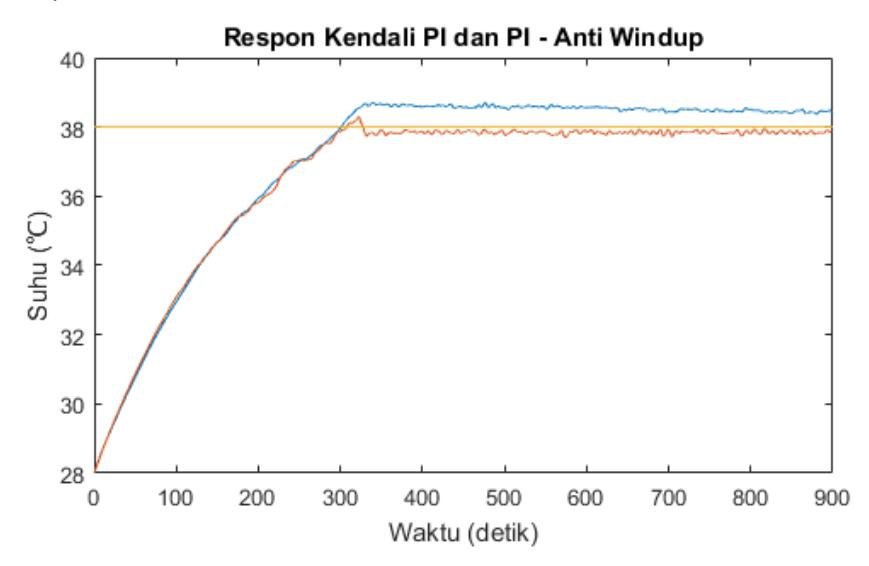
Gambar 54. Perbandingan respon kendali suhu pada implementasi
Gambar 54 menampilkan grafik perbedaan kendali suhu dari algoritma kendali PI dan kendali PI – anti windup. Dilihat dari bentuk grafik kedua algoritma kendali PI dan kendali PI – anti windup merupakan tipe over damped response karena terdapat overshoot pada output suhu. Kendali PI menghasilkan respon yang kurang baik karena output suhu terdapat overshoot yang terbilang jauh dari setpoint akibat dari akumulasi kendali integral yang terus beroperasi dan kendali PI – anti windup terlihat cukup baik dengan adanya penambahan anti windup yang sangat memberi pengaruh besar pada output suhu sehingga overshoot sedikit lebih kecil dari kendali PI. Berdasarkan parameter yang dibutuhkan prototipe simulator penetas telur ayam, algoritma kendali PI – anti windup lebih cocok digunakan dari pada kedua algoritma kendali PI. Selain itu perbandingan karakteristik respon transient dari ketiga algoritma kendali tersebut dapat dilihat pada Tabel 8 berikut.
Tabel 8. Perbandingan respon transient kendali suhu pada implementasi
| Time constant | Rise time | Peak time | Settling time | Delay time | |
|---|---|---|---|---|---|
| PI | 154,5 detik | 233 detik | 339,5 detik | 971 detik | 101,5 detik |
| PI - AW | 144,5 detik | 226,5 detik | 322,5 detik | 280 detik | 98 detik |
Berdasarkan Tabel 8, algoritma kendali PI - anti windup memiliki karakteristik respon transient yang lebih cepat dari algoritma kendali PI, salah satunya nilai settling time yaitu waktu yang menyatakan respon telah masuk sebesar 5% dari respon steady state. Kendali FLC – PI terhitung lebih cepat 691 detik dari kendali PI dapat dikatakan kendali PI - anti windup lebih cocok dengan kebutuhan algoritma kendali pada prototipe simulator penetas telur ayam dalam optimasi kendali suhu.
4. Kesimpulan
- 1. Perancangan model transfer function berhasil dibuat dan mampu merepresentasikan modul AC light dimmer yang sebenarnya dan perancangan prototipe simulator penetas telur ayam berhasil dirancang menggunakan node sensor dan node aktuator sebagai rangkaian pengendali, kedua node berhasil terhubung secara nirkabel dan dapat mengirim serta menerima data dengan baik.
- 2. Kendali Fuzzy Logic Controller (FLC) PI, kendali Proportional Integral (PI) dan kendali PI anti windup berhasil dibuat dan di implementasikan pada hasil rancangan prototipe simulator penetas telur ayam.
- 3. Hasil analisis perbandingan dari ketiga algoritma kendali FLC PI, kendali PI dan kendali PI anti windup menunjukan bahwa algoritma kendali FLC – PI lebih baik dari kendali PI ataupun kendali PI – anti windup dan cocok digunakan pada prototipe simulator penetas telur ayam karena mampu mengendalikan suhu secara optimal.
- 4. Kendali FLC PI memiliki respon transient yang cepat dengan nilai time constant sebesar 133,5 detik, rise time sebesar 234 detik, settling time sebesar 264 detik dan delay time sebesar 95,5 detik.
5. Nomenklatur
P = Proportional I = Integral
PI = Proportional Integral PWM = Pulse Width Modulation PCB = Printed Circuit Board LCD = Liquid Crystal Display MATLAB = Matrix Laboratory
SIT = System Identification Toolbox PRBS = Pseudo Random Binary Sequences
IoT = Internet of Things
6. Referensi
- [1] S. Syafik, K. Joni, and A. F. Ibadillah, "Rancang Bangun Alat Penetas Telur Ayam Otomatis Dengan Metode Pid (Proportional Integral Derivative) Berbasis Energy Hybrid," J. Tek. Elektro dan Komput. TRIAC, vol. 4, no. 2, 2017, doi: 10.21107/triac.v4i2.3264.
- [2] A. Rahayuningtyas, M. Furqon, and T. Santoso, "Rancang Bangun Alat Penetas Telur Deerhana Menggunakan Sensor Suhu dan Penggerak Otomatis," Pros. Semin. Nas. Penelit. dan PKM Sains, Teknol. dan Kesehat., vol. 4, no. 1, pp. 245–252, 2014, [Online]. Available: http://proceeding.unisba.ac.id/index.php/sains_teknologi/article/view/595.
- [3] R. Ahaya and S. Akuba, "Rancang bangun alat penetas telur," J. Teknol. Pertan. Gorontalo, vol. 3,
- no. 1, 2018.
- [4] R. Hidayat and P. W. Rusimanto, "Sistem Pengendalian Temperatur Pada Inkubator Penetas Telur Otomatis Berbasis Fuzzy Logic Control," J. Tek. Elektro, vol. 8, no. 1, p. 9, 2019.
- [5] M. S. Hadi, S. Ubaidilah, R. A. P. Sari, and D. P. Fatmala, "Sistem kendali otomatis mesin penetas telur menggunakan kontroler PID," Tekno, vol. 27, no. 2, p. 116, 2019, doi: 10.17977/um034v27i2p116-124.
- [6] G. Yanto, "Logika Fuzzy Untuk Kendali Suhu Ruangan Pada Air Conditioner ( Ac ) Di Ruang Dosen Fuzzy Logic Control of Air-Conditioning System in Lecturer Room of Stmik Indonesia Padang," J. Ilmu Fis. dan Teknol., vol. 1 No.2, no. 2580–989X, pp. 23–32, 2017.
- [7] D. Dhanny Jufril, Darwison, Budi Rahmadya, "Implementasi Mesin Penetas Telur Ayam Otomatis Menggunakan Metoda Fuzzy Logic Control," Semin. Nas. Sains dan Teknol., no. November, pp. 1– 6, 2015.
- [8] T. D. Madyanto, I. Santoso, and I. Setiawan, "Pengontrolan Suhu Menggunakan Metode FUZZY-PID pada Model Sistem Hipertermia," Pengontrolan Suhu Menggunakan Metod. FUZZY-PID pada Model Sist. Hipertermia, vol. 12, no. 1, pp. 21–26, 2010, doi: 10.12777/transmisi.12.1.21-26.
- [9] A. Rafi and A. Tahtawi, "Perancangan Pengendali Proportional-Integral Anti-Windup (Pi-Aw) pada Simulator Mobil Listrik untuk Kendali Kecepatan dan Torsi," Electrans, vol. 14, no. 1, pp. 1–7, 2016.
- [10] R. F. Iskandar, R. Putra, and A. Suhendi, "Analisis Pengaruh Kontrol PI Dengan Integral Anti-Windup Sebagai Upaya Reduksi Lonjakan Respon pada Sistem Ruang Termal," Komputika J. Sist. Komput., vol. 8, no. 1, pp. 53–58, 2019, doi: 10.34010/komputika.v8i1.1679.
- [11] F. S. Fahmi and D. I. Saputra, "Pengontrolan Bukaan Valve Pada Sistem Vessel Separator Dengan Metode Logika Fuzzy Berbasis Node Nirkabel Valve Opening Control in Vessel Separator System Using Fuzzy Logic Method With A Wireless Node-Based," Sent. 2019 Semin. Nas. Tek. Elektro 2019, no. November 2019, pp. 135–149, 2019.