
1 Pendahuluan
Sebagai media pembelajaran sistem kontrol proses industri, dibuat demo set yang merepresentasikan proses yang ada dalam sistem aktual dalam suatu prototype rangkaian listrik dengan pengintegrasian ke beberapa level hingga HMI. Perangkat pembelajaran demo set telah dibuat oleh peneliti sebelumnya pada tahun 2018. Demo set yang ada di Laboratorium Instrumentasi Industri merupakan emulator tangki kering yang direpresentasikan dengan rangkaian listrik yang menggambarkan dinamika dari sistem multitangki berinteraksi berdasarkan kesetaraan dari pemodelan bond graph. Pada sistem demo set ini diasumsikan bahwa semua sensor berjalan dengan baik dan terdapat semua variabel keadaan. Untuk sarana media pembelajaran yang lebih kompleks dan baik, perlu adanya analisa terhadap pemodelan demo set agar sesuai dengan keadaan aktual, dan penambahan fitur seperti observer, fault detection, dsb.
Permasalahan demo set yang telah dibuat pada penelitian sebelumnya diketahui memiliki pemodelan yang kurang sesuai dengan keadaan aktual. Pengontrolan yang seharusnya dilakukan pada aliran keluar, dilakukan pada aliran masuk yang menyebabkan pemodelan sistem menjadi lebih kompleks. Pada sistem kontrol proses industri, variabel yang ada sering kali berjumlah lebih dari satu (multivariabel) sehingga diperlukan pengontrolan yang sesuai dengan kondisi tersebut. Salah satu jenis pengontrolan yang memungkinkan adalah pengontrolan dengan metode penempatan poles. Oleh karena itu sangat penting untuk memperluas penelitian dan pengembangan pemodelan sistem pada demo set sebagai media pembelajaran sehingga tetap kompatibel dengan proses industri yang sebenarnya. Sehingga dalam makalah ini direpresentasikan perubahan pemodelan sistem menjadi lebih kompleks, pengontrolan sistem yang sesuai, simulasi dengan penambahan observer, serta penambahan gangguan pada masing-masing simulasi.
2 Metode
2.1 Kompleksitas Pemodelan Sistem Level Tangki
Pemodelan sistem yang menjadi fokus adalah proses yang bersifat self regulating dan penambahan gangguan pada proses. Proses yang bersifat self regulating adalah proses yang secara inheren mengatur diri sendiri dengan kata lain, proses self-regulating akan menunjukkan nilai variabel proses yang unik untuk setiap nilai keluaran yang mungkin [1]. Proses ini memiliki karakteristik umpan balik bawaan yang menyebabkan proses cenderung mengarah pada pengaturan sendiri [2]. Perubahan pemodelan sistem tangki dilakukan dengan mengubah valve pada ujung masing-masing tangki menjadi pompa dengan tujuan pengontrolan sistem menjadi linier dengan selisih SP ketinggian level tangki [3], penambahan valve pada tangki paling ujung untuk mengubah sistem agar bersifat self regulating, serta pengontrolan dilakukan pada aliran keluar. Gambar 1 merupakan contoh perbandingan antara perubahan pemodelan sistem 1 tangki. Sistem ini dikatakan bersifat self regulating karena memiliki masukan air yang masuk ke tangki (dari sumber) dan keluaran air yang mengalir ke tangki berikutnya atau ke lingkungan melalui valve R2a. Hal ini menyebabkan level air pada tangki konstan pada titik tertentu.
Gambar 1 (a) Pemodelan sistem demoset sebelumnya. (b) Kompleksitas pemodelan sistem
Pemodelan sistem tersebut akan dijelaskan pada sub judul ini dengan mengikuti struktur persamaan ẋ = + + dan persamaan y = + + [4], dimana u adalah manipulated variable (MV) dan w adalah gangguan. Gangguan direpresentasikan dengan aliran masuk atau keluar pada masing-masing tangki dengan notasi q1, q2, dan q3, serta pada sumber utama dengan notasi qin. Nilai parameter yang digunakan diambil pada data penelitian sebelumnya [5] yaitu :
| Resistor | Nilai Resistor | Kapasitor | Nilai Kapasitor |
| R1a | KΩ 10,0 | C1 | 102 μF 100 × |
| R2a | KΩ 10,0 | C2 | 102 μF 47,0 × |
| R3a | KΩ 10,0 | C3 | 102 μF 100 × |
| R4a | KΩ 10,0 |
Tabel 1 Nilai dari komponen resistor dan kapasitor
2.1.1 Sistem 1 Tangki
Gambar 2 Skema sistem 1 tangki
Penurunan persamaan dilakukan dengan metode ruang keadaan sehingga menghasilkan persamaan berikut ini.
\[\dot{h_{1}} = \left[ -\frac{1}{C_{1}R_{2a}} \right] h_{1} + \left[ -\frac{1}{C_{1}} \right] q_{1} + \left[ \frac{1}{C_{1}} \quad \frac{1}{C_{1}} \right] \begin{bmatrix} q_{in} \\ q_{d1} \end{bmatrix}\] (1)
\[y = [1] h_1 + [0] q_1 + [0 \quad 0] \begin{bmatrix} q_{in} \\ q_{d1} \end{bmatrix}\] (2)
2.1.2 Sistem 2 Tangki
Gambar 3 Skema sistem 2 tangki
Penurunan persamaan dilakukan dengan metode ruang keadaan sehingga menghasilkan persamaan berikut ini.
\[\begin{bmatrix} \dot{h_1} \\ \dot{h_2} \end{bmatrix} = \begin{bmatrix} -\frac{1}{R_{2a}C_1} & \frac{1}{C_1R_{2a}} \\ \frac{1}{C_2R_{2a}} & -\frac{1}{C_2R_{2a}} - \frac{1}{C_2R_{3a}} \end{bmatrix} \begin{bmatrix} h_1 \\ h_2 \end{bmatrix} + \begin{bmatrix} -\frac{1}{C_1} & 0 \\ 0 & -\frac{1}{C_2} \end{bmatrix} \begin{bmatrix} q_1 \\ q_2 \end{bmatrix} + \begin{bmatrix} \frac{1}{C_1} & \frac{1}{C_1} & 0 \\ 0 & 0 & \frac{1}{C_2} \end{bmatrix} \begin{bmatrix} q_{in} \\ q_{d1} \\ q_{d2} \end{bmatrix}\] (3)
\[[y] = \begin{bmatrix} 0 & 1 \end{bmatrix} \begin{bmatrix} h_1 \\ h_2 \end{bmatrix} + \begin{bmatrix} 0 & 0 \end{bmatrix} \begin{bmatrix} q_1 \\ q_2 \end{bmatrix} + \begin{bmatrix} 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} q_{in} \\ q_{d1} \\ q_{d2} \end{bmatrix}\](4)
2.1.3 Sistem 3 Tangki
Gambar 4 Skema sistem 3 tangki
Penurunan persamaan dilakukan dengan metode ruang keadaan sehingga menghasilkan persamaan berikut ini.
\[\begin{bmatrix} \dot{h}_{1} \\ \dot{h}_{2} \\ \dot{h}_{3} \end{bmatrix} = \begin{bmatrix} -\frac{1}{c_{1}R_{2a}} & \frac{1}{c_{1}R_{2a}} & 0 \\ \frac{1}{c_{2}R_{2a}} & -\left(\frac{1}{c_{2}R_{2a}} + \frac{1}{c_{2}R_{3a}}\right) & \frac{1}{c_{2}R_{3a}} \\ 0 & \frac{1}{c_{3}R_{3a}} & -\frac{1}{c_{3}R_{3a}} - \frac{1}{c_{3}R_{4a}} \end{bmatrix} \begin{bmatrix} h_{1} \\ h_{2} \\ h_{3} \end{bmatrix} + \begin{bmatrix} -\frac{1}{c_{1}} & 0 & 0 \\ 0 & -\frac{1}{c_{2}} & 0 \\ 0 & 0 & -\frac{1}{c_{3}} \end{bmatrix} \begin{bmatrix} q_{1} \\ q_{2} \\ q_{3} \end{bmatrix} + \begin{bmatrix} c_{1} & \frac{1}{c_{1}} & 0 & 0 \\ 0 & 0 & \frac{1}{c_{2}} & 0 \\ 0 & 0 & 0 & \frac{1}{c_{2}} & 0 \\ 0 & 0 & 0 & \frac{1}{c_{2}} \end{bmatrix} \begin{bmatrix} q_{1n} \\ q_{d1} \\ q_{d2} \\ q_{d3} \end{bmatrix}\] (5)
\[[y] = \begin{bmatrix} 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} h_1 \\ h_2 \\ h_3 \end{bmatrix} + \begin{bmatrix} 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} q_1 \\ q_2 \\ q_3 \end{bmatrix} + \begin{bmatrix} 0 & 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} q_{\text{in}} \\ q_{\text{d1}} \\ q_{\text{d2}} \\ q_{\text{d3}} \end{bmatrix}\](6)
2.2 Simulasi Kompleksitas Pemodelan Sistem Kalang Terbuka
Dari persamaan 1-6 untuk masing-masing sistem, kemudian disimulasikan sistem kalang terbuka pada Gambar 5. Hal ini berfungsi untuk mengetahui karakteristik sistem dan membandingkan dengan karakteristik sistem yang dihasilkan sebelumnya. Simulasi berikut dilakukan dengan menambahkan MV sebesar 10% untuk sistem 1 tangki, 5 % untuk sistem 2 tangki, dan 3,33% untuk sistem 3 tangki. Grafik yang didapatkan dbalikkan sedemikian rupa guna mempermudah Analisa.

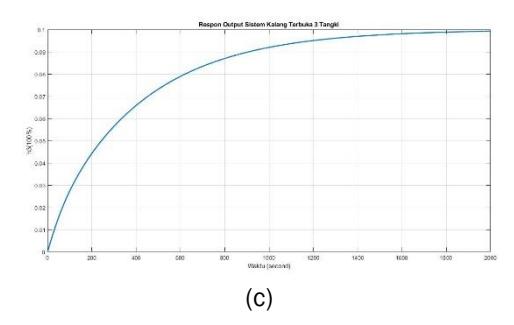
Gambar 5 Respon output sistem kalang terbuka pada (a) sistem 1 tangki, (b) sistem 2 tangki, dan (c) sistem 3 tangki
Berdasarkan Gambar 5 didapatkan karakteristik masing-masing sistem seperti pada Tabel 2.
Tabel 2 Perbandingan karakteristik sistem kalang terbuka dengan petugas akhir sebelumnya
| Ciotom | Sisten | Sistem Kalang Terbuka | Petugas Akhir Sebelumnya | |||
|---|---|---|---|---|---|---|
| Sistem | Ts | OS | τ | Ts | OS | τ |
| 1 Tangki | 350 | 100 | 0 | 118 | 42 | 0 |
| 2 Tangki | 650 | 247 | 0 | 161 | 61 | 0 |
| 3 Tangki | 1200 | 177 | 0 | 211 | 120 | 170 |
Berdasarkan Tabel 2 tersebut terihat bahwa sistem kalang terbuka memiliki respon output yang lebih lama dibandingkan dengan hasil petugas akhir sebelumnya, sehingga sistem tersebut memerlukan pengontrolan untuk menghasilkan karakteristik yang diinginkan.
2.3 Analisa Kestabilan Sistem
Suatu sistem dikatakan stabil apabila nilai eigen atau nilai pole dominant sistem tersebut bernilai negatif [6]. Analisa kestabilan masing-masing system terdapat pada Tabel 3.
Tabel 3 Analisa kestabilan sistem
| Sistem | Matriks A | Nilai Eigen | Keterangan |
|---|---|---|---|
| 1 Tangki | A = [-0.01] | \(\mu_1 = -0.01\) | Stabil |
| 2 Tangki | \[A = \begin{bmatrix} -0.01 & 0.01 \\ 0.0213 & -0.043 \end{bmatrix}\] | \[\mu_1 = -0.0481, \mu_2 = -0.0044\] | Stabil |
| 3 Tangki | \[\mathbf{A} = \begin{bmatrix} -0.01 & 0.01 & 0\\ 0.0213 & -0.043 & 0.0213\\ 0 & 0.01 & -0.02 \end{bmatrix}\] | \[\mu_1 = -0.0537, \mu_2 = -0.0024, \mu_3 = -0.0164\] | Stabil |
2.4 Analisa Keterkontrolan Sistem
Syarat sistem bersifat terkontrol adalah diketahui persamaan sistem \(\dot{\mathbf{x}} = \mathbf{A}\mathbf{x} + \mathbf{B}\mathbf{u}\), dimana matriks \(\mathbf{A}\) berukuran n x n, dan \(\mathbf{y} = \mathbf{C}\mathbf{x} + \mathbf{D}\mathbf{u}\), dapat dikatakan terkontrol jika dan hanya jika matriks \(\mathbf{O}_{\mathbf{b}}\) tersebut memiliki \(rank = \mathbf{n}\), dimana matriks \(\mathbf{O}_{\mathbf{b}} = [\mathbf{B} : \mathbf{A}\mathbf{B} : ... : \mathbf{A}^{\mathbf{n}-1}\mathbf{B}]\) [7] atau dengan menggunakan perintah pada MATLAB : \(\mathbf{O}_{\mathbf{b}} = \operatorname{ctrb}(\mathbf{A}, \mathbf{B})\). Analisa keterkontrolan masing-masing sistem terdapat pada Tabel 4.
| Tabal | 4 | Analiaa | keterkontrolan | -!-+ |
| Sistem | Matriks Keterkontrolan (Ob) | Rank Ob |
|---|---|---|
| 1 Tangki | \(O_b = [-100]\) | 1 |
| 2 Tangki | \[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\] | 2 |
| 3 Tangki | \[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\] | 3 |
2.5 Analisa Keteramatan Sistem
Syarat sistem bersifat teramati adalah jika diketahui persamaan sistem \(\dot{\mathbf{x}} = \mathbf{A}\mathbf{x} + \mathbf{B}\mathbf{u}\), dimana matriks A berukuran n x n, dan y = Cx + Du, dapat dapat dikatakan teramati jika dan hanya jika matriks \(\mathbf{0}_{\mathrm{c}}\) tersebut memiliki rank = n, dimana matriks \(\mathbf{0}_{\mathrm{c}} = [\mathbf{C}: \mathbf{CA}: ...:\)\({\bf C}{\bf A}^{\rm n-1}\) ] [6] atau dengan menggunakan perintah pada MATLAB : \({\bf O}_{\rm c}={\rm obsv}\) (A, C). Analisa keteramatan masing-masing sistem terdapat pada Tabel 5.
Tabel 5 Analisa keteramatan sistem
| Sistem | Matriks Keteramatan (Oc) | Rank Oc |
|---|---|---|
| 1 Tangki | \(o_c = [1]\) | 1 |
| 2 Tangki | \[\boldsymbol{o}_c = \begin{bmatrix} 0 & 1 \\ 0,0213 & -0,0426 \end{bmatrix}\] | 2 |
| 3 Tangki | \[\boldsymbol{o}_c = \begin{bmatrix} 0 & 0 & 1 \\ 0 & 0.01 & -0.02 \\ 0.0002 & -0.0006 & 0.0006 \end{bmatrix}\] | 3 |
2.6 Pengontrolan
2.6.1 Penempatan Pole
Langkah pertama dalam merancang sistem kontrol dengan ruang keadaan adalah menentukan aksi kontrol (control law) [8].
\[\mathbf{u} = -\mathbf{K}\mathbf{x} = -\left[\mathbf{K}_{1} \; \mathbf{K}_{2} \; \cdots \; \mathbf{K}_{n}\right] \begin{bmatrix} \mathbf{x}_{1} \\ \mathbf{x}_{2} \\ \vdots \\ \mathbf{x}_{n} \end{bmatrix}\] (7)
Substitusi aksi kontrol pada persamaan 7 ke sistem ruang keadaan menghasilkan
\[\dot{\mathbf{x}} = \mathbf{A}\mathbf{x} + \mathbf{B}\mathbf{u}\] \[\dot{\mathbf{x}} = (\mathbf{A} - \mathbf{B}\mathbf{K})\mathbf{x}\]
Persamaan karakteristik sistem lup tertutupnya:
\[\det(\mathbf{s}\mathbf{I} - (\mathbf{A} - \mathbf{B}\mathbf{K})) = 0 \tag{8}\]
Penentuan nilai T<sub>s</sub> awal yaitu 159s, berdasarkan nilai konstanta waktu rangkaian, akan tetapi saat pemberian gangguan dengan varians 10% menghasilkan eror yang besar, sehingga dipilih lebih cepat untuk menanggulangi eror tersebut. Nilai T<sub>s</sub> dan OS yang dipilih sebesar
10 s dan 5 %, dan nilai pole yang diinginkan diperoleh menggunakan formula second order dominant [9].
\[\zeta = -\frac{\ln(\%OS)}{\sqrt{\pi^2 + \ln^2(\%OS)}} = 0,69, \, \omega_n = \frac{4}{T_S \zeta} = 0,58 \, (with \, 2\% \, creation)\]
Dari nilai \(\zeta\) dan \(\omega_n\) , letak pole tertutup dominan dalam domain kontinu yang diinginkan adalah
\[s_n = -\zeta \omega_n \pm i \omega_n \sqrt{1 - \zeta^2} = -0.4 \pm 0.42 i\]
Nilai pole dominant merupakan nilai eigen pada sistem state space. Sistem yang membutuhkan lebih dari 2 nilai eigen, nilai eigen lainnya ditempatkan 2-15x [10] dari kedua nilai eigen tersebut. Nilai K dicari dengan perintah MATLAB yaitu K = acker(A, B, P) atau K = place(A, B, P), dimana \(P = [\mu_1 \quad \mu_2 \quad \cdots \quad \mu_n]\). Penempatan nilai eigen yang diinginkan, nilai P, matriks K pada Tabel 6.
Tabel 6 Nilai eigen yang diinginkan dan gain pengontrol pada pengontrolan dengan penempatan pole
| Sistem | Nilai eigen yang diinginkan (P) | Matriks K |
|---|---|---|
| 1 Tangki | \[\mu_1 = -0.4\] | K = [-0.0039] |
| 2 Tangki | \[\begin{array}{l} \mu_1 = -0.4 + 0.42i, \\ \mu_2 = -0.4 - 0.42i, \end{array}\] | \[\mathbf{K} = \begin{bmatrix} -0.0039 & -0.0028 \\ 0.00012 & -0.0017 \end{bmatrix}\] |
| 3 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i,\] \[\mu_3 = -2\] | \[\mathbf{K} = \begin{bmatrix} -0.0039 & -0.0043 & 0\\ 0.0019 & -0.0017 & -0.0001\\ 0 & -0.0001 & -0.0198 \end{bmatrix}\] |
2.6.2 Penambahan Kendali Integral
Pada penambahan kondisi integral, kecepatan perubahan sinyal kontrol sebanding dengan sinyal eror. Penambahan kondisi integral bertujuan untuk menghilangkan kesalahan posisi dalam keadaan mantap tanpa mengubah karakteristik-karakteristik frekuensi tinggi dan hal ini dapat dicapai dengan memberikan penguatan tidak tak terhingga pada frekuensi nol yaitu pada kondisi mantap. diasumsikan tambahan keadaan integral \(\mathbf{x}_{\mathbf{i}}\) yang mempunyai persamaan diferensial [9].
\[\dot{\mathbf{x}}_{\mathbf{I}} = \mathbf{C}\mathbf{x} - \mathbf{r} = \mathbf{e} \operatorname{dan} \mathbf{x}_{\mathbf{I}} = \int_{0}^{t} \operatorname{edt}\]
Sehingga persamaan tambahannya menjadi
\[\begin{bmatrix} \dot{x} \\ \dot{x}_I \end{bmatrix} = \begin{bmatrix} 0 & A \\ 0 & C \end{bmatrix} \begin{bmatrix} x \\ x_I \end{bmatrix} + \begin{bmatrix} B_1 \\ 0 \end{bmatrix} u - \begin{bmatrix} 0 \\ 1 \end{bmatrix} r + \begin{bmatrix} B_2 \\ 0 \end{bmatrix} w\]
Dengan kontrol umpan baliknya
\[\mathbf{u} = \begin{bmatrix} -\mathbf{K}_1 & -\mathbf{K}_2 \end{bmatrix} \begin{bmatrix} \mathbf{X} \\ \mathbf{X}_i \end{bmatrix} = -\mathbf{K}_{\mathbf{I}} \begin{bmatrix} \mathbf{X} \\ \mathbf{X}_i \end{bmatrix}\]
Penggunaan integral melibatkan penambahan kondisi integral untuk variabel keadaan pada masing-masing sistem, nilai eigen yang diinginkan nilai \(\mathbf{P}\), matriks \(\mathbf{K}_{l}\) pengontrolan dengan kendali integral terdapat pada Tabel 7.
Tabel 7 Nilai eigen yang diinginkan dan gain pengontrol pada pengontrolan dengan penambahan kendali integral
| Sistem | Nilai eigen yang diinginkan (P) | Matriks Kı | |||
|---|---|---|---|---|---|
| 1 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i\] | \(K_I = [-0.008 -0.0023]\) | |||
| 2 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i,\] \[\mu_3 = -2, \mu_4 = -3\] | ||||
| 3 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i,\] \[\mu_3 = -2, \mu_4 = -3,\] \[\mu_5 = -4, \mu_6 = -5\] | ||||
2.7 Penambahan Observer
Observer merupakan tools yang digunakan dalam pengontrolan untuk mengestimasi variabel-variabel keadaan yang tidak diketahui dengan menggunakan data pengukuran. Sehingga seringkali estimasi variabel keadaan lebih diinginkan daripada pengukuran langsung dikarenakan observer merupakan sistem dinamik yang variabel-variabel keadaannya adalah estimasi dari variabel keadaan sistem. Eror yang terjadi merupakan perbedaan antara keadaan (state) sistem aktual dengan keadaan (state) dari observer [9]. Observer dilakukan dengan menggunakan metode full state observer. Penambahan observer pada sistem kontrol akan mengubah dinamika sistem menjadi [6].
\[\begin{bmatrix} \dot{\mathbf{x}} \\ \dot{\mathbf{e}} \end{bmatrix} = \begin{bmatrix} \mathbf{A} - \mathbf{B} \mathbf{K} & \mathbf{B} \mathbf{K} \\ \mathbf{0} & \mathbf{A} - \mathbf{K}_e \mathbf{C} \end{bmatrix} \begin{bmatrix} \mathbf{x} \\ \mathbf{e} \end{bmatrix}\]
Nilai eigen observer dapat dipilih lebih cepat 3-6 kali dibandingkan dengan nilai eigen kendali. Ini akan menjamin peluruhan (decay) eror observer lebih cepat dibandingkan dinamika yang diinginkan [6]. Nilai \(K_e\) (gain observer) dapat dicari dengan perintah MATLAB yaitu Ke = acker(A', C', I) atau Ke = place(A', C', I), dimana \(I = [\mu_{10} \quad \mu_{20} \quad \dots \quad \mu_n]\).
2.7.1 Penambahan Observer pada Pengontrolan Penempatan Pole
Tabel 8 Nilai eigen observer pada pengontrolan dengan penempatan pole
| Sistem | Nilai eigen pengontrol (Penempatan poles) | Nilai eigen observer (J) |
|---|---|---|
| 1 Tangki | \(\mu_1 = -0.4\) | \(\mu_{10} = -2\) |
| 2 Tangki | \[\begin{array}{l} \mu_1 = -0.4 + 0.42\mathrm{i}, \\ \mu_2 = -0.4 - 0.42\mathrm{i} \end{array}\] | \(\mu_{10} = -2, \; \mu_{20} = -3\) |
| 3 Tangki | \[\begin{array}{l} \mu_1 = -0.4 + 0.42\mathrm{i}, \\ \mu_2 = -0.4 - 0.42\mathrm{i}, \\ \mu_3 = -2 \end{array}\] | \(\mu_{10} = -6, \ \mu_{20} = -7, \\ \mu_{30} = -8\) |
| Sistem | Nilai eigen pengontrol (penambahan kondisi integral) | Nilai eigen observer (J) |
|---|---|---|
| 1 Tangki | \[\mu_1 = -0.4 + 0.42i, \mu_2 = -0.4 - 0.42i\] | \(\mu_{10} = -2, \; \mu_{20} = -3\) |
| 2 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i,\] \[\mu_3 = -2, \mu_4 = -3\] | \(\mu_{10} = -9, \ \mu_{20} = -10, \mu_{30} = -11, \ \mu_{40} = -12\) |
| 3 Tangki | \[\mu_1 = -0.4 + 0.42i,\] \[\mu_2 = -0.4 - 0.42i,\] \[\mu_3 = -2, \mu_4 = -3,\] \[\mu_5 = -4, \mu_6 = -5\] | \(\mu_{10} = -15, \ \mu_{20} = -16, \mu_{30} = -17, \mu_{40} = -18, \ \mu_{50} = -19, \mu_{60} = -20\) |
Dari nilai eigen tersebut didapatkan nilai gain observer adalah
Tabel 10 Gain observer untuk masing-masing jenis pengontrol
| Sistem | Gain Ke | |
|---|---|---|
| Sistem | Penempatan Pole | Penambahan Kondisi Integral |
| 1 Tangki | [1,99] | \[\begin{bmatrix} 2 & 0 \\ 1 & 3 \end{bmatrix}\] |
| 2 Tangki | [279,7] [4,95] | [8,99 0 0,01 0 1 10 0 0 0,02 0 10,96 0 0 0 1 12 |
| 3 Tangki | \(1 \times 10^6 \begin{bmatrix} 1,57\\0,015\\0 \end{bmatrix}\) | \[\begin{bmatrix} 15 & 0 & 0,01 & 0 & 0 & 0 \\ 1 & 16 & 0 & 0 & 0 & 0 & 0 \\ 0,021 & 0 & 16,96 & 0 & 0,021 & 0 \\ 0 & 0 & 1 & 18 & 0 & 0 & 0 \\ 0 & 0 & 0,01 & 0 & 18,99 & 0 \\ 0 & 0 & 0 & 0 & 1 & 20 \end{bmatrix}\] |
3 Hasil
3.1 Pengontrolan Sistem
Simulasi pengontrolan sistem tangki interaksi pada demo set dilakukan dengan kondisi awal 0, sehingga respon sistem kalang tertutup untuk masing-masing sistem tangki dengan pengontrolan penempatan pole dan penambahan kondisi integral dapat dilihat pada Gambar 6.
Gambar 6 Respon output sistem kalang tertutup dengan pengontrolan penempatan pole dan penambahan kendali integral pada (a) sistem 1 tangki, (b) sistem 2 tangki, dan (c) sistem 3 tangki
Berdasarkan Gambar 6 didapatkan karakteristik masing-masing sistem terdapat pada Tabel 11 untuk pengontrolan dengan penempatan pole dan Tabel 12 untuk pengontrolan dengan penambahan kondisi integral.
Penempatan nilai eigen yang diinginkan terdapat pada bagian 2.6.1. Karakterisik sistem setelah pengontrolan terdapat pada Tabel 11.
Sistem OS (%) Ts (s) 1 Tangki 0 10 2 Tangki 7,4 10,8
Tabel 11 Karakteristik sistem demo set dengan penempatan pole
Penggunaan integral melibatkan kondisi integral untuk state pada masing-masing sistem, dimana penyesuaian persamaan untuk penggunaan penambahan kondisi integral terdapat pada bagian 2.6.2. Karakteristik sistem setelah pengontrolan dengan penambahan kondisi integral terdapat pada Tabel 12.
3 Tangki 0 2
Tabel 12 Karakteristik sistem demo set dengan penambahan kondisi integral
| Sistem | OS (%) | Ts (s) |
|---|---|---|
| 1 Tangki | 16,9 | 12 |
| 2 Tangki | 12,3 | 5 |
| 3 Tangki | 13,2 | 2,2 |
3.2 Penambahan Gangguan pada Sistem Kontrol
Pada sistem 1 tangki pemberian gangguan dilakukan pada masukan (\(q_{in}\)) dan tangki 1 (\(q_{d1}\)), dimana offset paling besar dihasilkan saat pemberian gangguan \(q_{d1}\). Pada sistem 2 tangki, dilakukan pemberian gangguan pada masukan (\(q_{in}\)), tangki 1 (\(q_{d1}\)), dan tangki 2 (\(q_{d2}\)), dimana offset paling besar dihasilkan saat pemberian gangguan \(q_{d2}\), hal ini dikarenakan gangguan \(q_{in}\) dan \(q_{d1}\) difilter terlebih dahulu oleh tangki 1. Pada sistem 3 tangki, dilakukan pemberian gangguan pada masukan (\(q_{in}\)), tangki 1 (\(q_{d1}\)), tangki 2 (\(q_{d2}\)), dan tangka 3 (\(q_{d3}\)), dimana offset paling besar dihasilkan saat pemberian gangguan \(q_{d3}\), hal ini dikarenakan gangguan \(q_{in}\), \(q_{d1}\), dan \(q_{d2}\) difilter terlebih dahulu oleh tangki 1 dan tangki 2. Pada saat penambahan gangguan pada sistem dengan penambahan kondisi integral menghasilkan offset yang lebih kecil dibandingkan saat penambahan gangguan pada sistem dengan kendali penempatan pole. Hal ini tentunya membuktikan bahwa dengan penambahan kondisi integral mampu mengurangi offset pada sistem.
3.3 Observer
Desain observer dilakukan dengan teknik yang sama pada pengontrolan, dimana nilai pole observer ditempatkan 5 kali dari nilai eigen dominant pengontrol sistem. Dimana gain observer untuk masing-masing sistem terdapat pada Tabel 13.
| Sistem | Gain Observer | |
|---|---|---|
| 4 | Penempatan Pole | \[K_e = [1, 99]\] |
| 1 Tangki | Penambahan Kondisi Integral | \(\mathbf{K_e} = \begin{bmatrix} 2 & 0 \\ 1 & 3 \end{bmatrix}\) |
| Penempatan Pole | \[\mathbf{K_e} = \begin{bmatrix} 279, 7 \\ 4, 95 \end{bmatrix}\] | |
| 2 Tangki | Penambahan Kondisi Integral | \[K_e = \begin{bmatrix} 8,99 & 0 & 0,01 & 0 \\ 1 & 10 & 0 & 0 \\ 0,02 & 0 & 10,96 & 0 \\ 0 & 0 & 1 & 12 \end{bmatrix}\] |
| Penempatan Pole | \(K_e = 1 \times 10^6 \begin{bmatrix} 1,57\\0,015\\0 \end{bmatrix}\) | |
| 3 Tangki | Penambahan Kondisi Integral | \[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\] |
Tabel 13 Penambahan gain observer pada sistem kontrol demo set
Dengan simulasi menggunakan MATLAB, dan nilai eror awal sebesar 20% dan initial condition 0, terlihat bahwa dengan penambahan observer pada sistem mampu mengurangi eror, dan semakin bertambahnya waktu nilai observer state akan sama dengan state sistem. Pada desain observer dengan penambahan kondisi integral didapatkan eror pada respon awal lebih kecil dibandingkan saat desain observer dengan pengontrolan penempatan pole. Hal ini membuktikan bahwa dengan penambahan kondisi integral lebih cepat untuk mengurangi eror pada sistem.
3.4 Penambahan Gangguan pada Sistem Kontrol dan Observer
Penambahan gangguan pada desain kendali dan observer dilakukan sama seperti penambahan gangguan pada sistem dengan kendali saja. Didapatkan hasil bahwa dengan penambahan observer offset yang dihasilkan berkurang akan tetapi pada observer bekerja hingga 5-10s, kemudian setelah itu penanggulangan terhadap gangguan dilakukan oleh sistem kendali. Sehingga perlu penataan ulang desain sistem kendali untuk menghasilkan maksimal nilai offset yang diinginkan.
3.5 Persamaan Minimum Pole Dominant / Nilai Eigen terhadap Nilai Variansi Gangguan
Untuk menanggulangi gangguan dengan varians yang cukup besar, maka perlunya mendesain ulang sistem kendali. Sehingga perlunya menempatkan nilai pole dominant / nilai eigen yang diinginkan untuk mengatasi gangguan tersebut, didapatkan persamaan untuk masing-masing sistem terdapat pada Tabel 14, dimana y merupakan minimum penempatan pole dominant / nilai eigen dan x merupakan variansi gangguan.
| Maksimal | Penempatan Pole | Penambahan Kondisi Integral | |||
|---|---|---|---|---|---|
| Sistem | Offset | Persamaan | R2 | Persamaan | R2 |
| 1 | 5% | 𝑦 = −45,85𝑥 +4,16 | 0,99 | 𝑦 = −15,33𝑥 +0,47 | 0,99 |
| Tangki | 10% | 𝑦 = −22,31𝑥 +3,07 | 0,99 | 𝑦 = −10,27𝑥 +1,46 | 0,98 |
| 2 | 5% | 𝑦 = −106,5𝑥 +7,07 | 0,99 | 𝑦 = −33,11𝑥 −5,39 | 0,96 |
| Tangki | 10% | 𝑦 = −51,63𝑥 +4,51 | 0,99 | 𝑦 = −17,7𝑥 +5,11 | 0,99 |
| 3 | 5% | 𝑦 = −37,97𝑥 +5,03 | 0,99 | 𝑦 = −13,26𝑥 +3,37 | 0,98 |
| Tangki | 10% | 𝑦 = −15,25𝑥 +2,89 | 0,97 | 𝑦 = −7,13𝑥 +2,19 | 0,97 |
Tabel 14 Persamaan pole dominant / nilai eigen dan nilai variansi gangguan
4 Kesimpulan
- 1. Perubahan sistem tangki yang telah dimodifikasi berupa pengontrolan yang dilakukan pada keluaran masing-masing tangki, dengan implementasi valve diubah menjadi pompa agar sinyal kontrol linear dengan perubahan besarnya aliran keluar. Selain itu diberikan tambahan valve untuk tangki paling akhir untuk mengubah proses pengontrolan menjadi self regulating.
- 2. Pengontrolan dilakukan dengan menggunakan metode penempatan poles dan penambahan kondisi integral. Penambahan kondisi integral akan memberikan nilai OS pada respon keluaran, dan memperlambat respon keluaran untuk mencapai kondisi tunak.
- 3. Nilai offset paling besar dihasilkan saat pemberian gangguan qd1 pada sistem 1 tangki, dimana dengan pemberian nilai varians sebesar 20% sudah menghasilkan offset sebesar 34,2% saat pengontrolan dengan penempatan poles, dan 28,9% saat pengontrolan dengan penambahan kondisi integral. Untuk sistem 2 tangki offset paling besar dihasilkan saat pemberian gangguan qd2, dimana minimum offset yang dihasilkan adalah 20% dihasilkan saat pemberian gangguan qd2 dengan varians sebesar 30% saat pengontrolan dengan penempatan poles, dan varians sebesar 20% saat pengontrolan dengan penambahan kondisi integral. Hal ini disebabkan karena pada saat pemberian gangguan qin dan qd1, gangguan tersebut terlebih dahulu difilter oleh tangki 1 sebelum dialirkan menuju tangki 2. Untuk sistem 3 tangki, offset paling besar dihasilkan saat pemberian gangguan qd3, dimana untuk menghasilkan minimum offset sebesar 20%, diperlukan gangguan qd3, dengan varians 60% dengan pengontrol menggunakan penempatan poles, dan 100% saat pengontrolan dengan penambahan kondisi integral. Hal ini disebabkan karena saat pemberian gangguan pada qin, qd1, dan qd2 untuk sistem 3 tangki, gangguan tersebut telah terfilter oleh tangki 1 maupun tangki 2, sehingga tidak menyebabkan offset pada respon keluaran sistem 3 tangki.
- 4. Pada saat pemberian gangguan qin, qd1, qd2, maupun qd3, yang disesuaikan dengan masing-masing tangki, didapatkan bahwa saat pengontrolan dengan menggunakan penambahan kondisi integral menghasilkan offset lebih kecil dibandingkan saat pengontrolan dengan menggunakan metode penempatan poles. Tentunya hal ini
- membuktikan bahwa dengan penambahan kondisi integral akan mempercepat peluruhan eror pada sistem.
- 5. Pada desain observer telah terlihat bahwa dengan penambahan gain observer akan mengurangi nilai eror pada perbedaan antara observer variabel keadaan sistem dengan variabel keadaan sistem.
- 6. Hubungan antara penempatan pole / nilai eigen dominan dan varians gangguan telah ditentukan. Asumsi yang digunakan adalah penempatan pole/nilai eigen lainnya 2-15x dari pole / nilai eigen dominan tersebut, dan pole observer minimal 3x dari pole / nilai eigen pengontrol.
5 Nomenklatur
C = Capacitance
h = Level tangki
MV = Manipulated variable
OS = Overshott
PV = Process variable
qi = Aliran masuk tangki
qo = Aliran keluar tangki
R = Resistance
RC = Resistor capasitor
SP = Set point
6 Daftar Pustaka
- [1] Kuphaldt, T., (2019): Lessons In Industrial Instrumentation, 2413 2415.
- [2] Beall, J., (2016): Loop Tunning Basics: Self-regulating Processes, InTech Magazine.
- [3] Setiawan, I. (2008): Kontrol PID untuk Proses Industri, Surabaya, PT Elex Media Komputindo.
- [4] Veness,T., (2017), Practical Guide to State-space Control, https://github.com/calcmogul/state-space-guide
- [5] D. Ivan, Alfriza, Rio. (2019): Pembuatan Perangkat Pembelajaran (Demo Set) untuk Sistem Kontrol Proses Terintegrasi. Tugas Akhir Program Sarjana, Institut Teknologi Bandung.
- [6] K. Ogata. (2002). Modern Control Engineering. Control Engineering. https://doi.org/10.1109/TAC.1972.1100013
- [7] Williams, R. L., dan Lawrence, D. A. (2007). Linear State-Space Control Systems. Linear State-Space Control Systems. https://doi.org/10.1002/9780470117873.
- [8] Susanto, E., dan Surya, A. (2017): Sistem Kontrol Multivariabel, 48 57.
- [9] G. F. Franklin, J.D. Powell, A. Emami-Naeini, "Feedback Control of Dynamic Systems", Pearson, 6th Edition, 2010.
- [10] R.S. Burns, "Advanced Control Engineering", Butterworth-Heinemann, 2001