
1 Pendahuluan
Salah satu permasalahan utama sistem perkeretaapian Indonesia adalah peningkatan jumlah penumpang yang tidak diimbangi dengan penambahan jumlah atau frekuensi operasional kereta yang sesuai. Berdasarkan data dari Badan Pusat Statistik, kenaikan jumlah penumpang kereta api secara signifikan terjadi sejak tahun 2013, khususnya di jalur KRL Jabodetabek. Peningkatan jumlah penumpang yang tidak diimbangi oleh peningkatan jumlah/operasional kereta api yang sesuai pada akhirnya menyebabkan terjadinya penumpukan penumpang di berbagai stasiun [1,2,3,4].
Dari sisi operasional, salah satu penyebab penumpukan penumpang di stasiun adalah karena teknologi persinyalan kereta api Indonesia saat ini masih menggunakan sistem persinyalan blok statis. Pada sistem persinyalan ini, segmen rel kereta dibagi terlebih dahulu menjadi beberapa blok dengan panjang tetap (misalnya 10 kilometer). Setiap blok dipisahkan oleh sinyal merah, kuning dan hijau (Gambar 1) dan hanya dapat ditempati oleh satu (1) rangkaian kereta (terdiri dari 1 lokomotif dan maksimal 10 gerbong penumpang/barang [2]) pada jangka waktu tertentu; kereta lain baru dapat mengakses blok tersebut apabila sudah kosong. Karenanya, dua rangkaian kereta berbeda akan selalu dipisahkan satu (1) blok kosong yang berfungsi sebagai jarak aman antar kereta. Penentuan panjang blok umumnya didasarkan pada jarak pengereman kereta [5].
Footprint
Gambar 2 Sistem persinyalan blok bergerak.
Footprint
Keterbatasan utama sistem persinyalan blok statis adalah tidak tersedianya informasi posisi dan kecepatan setiap rangkaian kereta secara akurat dan real time; informasi yang dapat dipastikan hanya terkait status okupansi setiap blok. Akibatnya, jumlah rangkaian kereta yang dapat dioperasikan di segmen rel tertentu menjadi terbatas [5].
Untuk mengatasi keterbatasan sistem persinyalan blok statis, praktisi perkeretaapian memperkenalkan sistem persinyalan blok bergerak sebagai salah satu alternatif solusi [6,7,8]. Pada persinyalan blok bergerak, segmen rel tidak dibagi menjadi beberapa blok statis dan pengoperasian kereta beberapa kereta dilakukan hanya berdasarkan kriteria jarak aman (pengeraman) antar kereta secara dinamis (Gambar 2). Akibatnya, jumlah kereta yang beroperasi dapat ditambah dengan tetap memenuhi kriteria batasan jarak aman antar kereta. Agar sistem persinyalan blok bergerak dapat diimplementasikan, diperlukan komponen tambahan pada rangkaian kereta itu sendiri (onboard) dan di sepanjang sisi rel (wayside), diantaranya sensor posisi dan kecepatan kereta [9].
Sistem persinyalan blok bergerak adalah basis utama teknologi CBTC. Teknologi CBTC dikarakterisasi oleh kemampuan penentuan posisi dan kecepatan kereta secara akurat dan presisi melalui sistem komunikasi dua arah antar kereta dengan perangkat komunikasi yang terdistribusi di sepanjang jalur rel (Gambar 3). Komponen CBTC terdiri dari pengawasan kereta otomatis, pengontrol zona, sistem komunikasi dua arah antara kereta dengan perangkat komunikasi di sepanjang rel, automatic train protection (ATP), dan sistem pengoperasian kereta otomatis (automatic train operation, ATO) [7, 8].
Gambar 3 Ilustrasi sistem CBTC.
Hingga kini, penelitian terkait teknologi CBTC telah banyak dilakukan. Referensi [9,10] membahas penggunaan teknik fusi multi sensor untuk penentuan posisi dan kecepatan kereta secara akurat dan presisi. Referensi [10] memperkenalkan penggunaan tapis Kalman filter untuk mengatur jarak aman antar rangkaian kereta. Referensi [11] mengajukan algoritme kontrol sinkronisasi untuk menjaga jarak aman antar kereta.
Referensi [12] memperkenalkan metode kontrol optimal dan [13,14] menggunakan LQR untuk meminimalkan biaya operasi dan meningkatkan fungsi pelacakan kecepatan kereta. Metode pengontrol fuzzy diajukan pada [15] untuk mencapai akurasi pelacakan kereta tanpa mengurangi kenyamanan penumpang. Penelitian teknologi CBTC lainnya mencakup pemodelan dinamik dan perancangan kontrol robas [16,17], penentuan efisiensi energi operasional kereta [18], analisis gangguan pada pegas penghubung gerbong kereta [19], kontrol aktuator motor pada kereta api berkecepatan tinggi [20], serta pengontrolan kelenturan pegas penghubung gerbong berbeda pada kereta [21].
Makalah ini memaparkan teknik pemodelan dan desain pengontrol pada dinamika kereta api yang dioperasikan dengan sistem persinyalan blok bergerak dalam kerangka teknologi CBTC. Model dinamika sistem diturunkan berdasarkan diagram benda bebas sistem [22], sedangkan pengontrolan rangkaian kereta dirancang dengan algoritme kontrol model prediksi terdistribusi atau distributed model predictive control (DMPC) [23,24]. Gerak konvoi rangkaian kereta diasumsikan menggunakan topologi sistem komunikasi searah dimana setiap rangkaian kereta hanya memperoleh informasi dari kereta lain yang terdekat. Setiap rangkain kereta menyelesaikan permasalahan kontrol optimal lokal berdasarkan informasi variabel keadaan dari kereta lain yang terdekat. Tujuan implementasi metode DMPC yang ditinjau adalah untuk memastikan setiap rangkaian kereta pada konvoi mampu melacak kecepatan kendaraan referensi di posisi paling depan sambil mempertahankan jarak aman referensi tertentu dengan kereta terdekat lain. Hasil simulasi numerik yang diperoleh dari implementasi metode DMPC yang diusulkan menunjukkan tercapainya tujuan desain pengontrol yang diinginkan.
2 Pemodelan dan Formulasi Permasalahan
2.1 Model Persamaan Ruang Keadaan Waktu Diskrit
Model dinamika setiap rangkaian kereta pada makalah ini diadaptasi dari [22] dan ditentukan berdasarkan diagram benda bebas (DBB) yang ditunjukkan pada Gambar 4.
\[C_{0_i} + C_{1_i}V_i(t) + C_{2_i}V_i(t)^2 \qquad \qquad m_i \qquad \qquad S_i\] \[V_i\]
Gambar 4 DBB model rangkaian kereta.
Berdasarkan DBB pada Gambar 4, model dinamika setiap rangkaian kereta pada waktu diskrit t dapat dinyatakan sebagai berikut:
\[\begin{split} S_{i}(t+1) &= S_{i}(t) + V_{i}(t)\Delta t \\ V_{i}(t+1) &= V_{i}(t) + \frac{\Delta t}{M_{i}} \left( \frac{\eta_{T,i}}{R_{i}} T_{i}(t) - \left( \left( C_{0_{i}} + C_{1_{i}} V_{i}(t) + C_{2_{i}} V_{i}(t)^{2} \right) + M_{i} g f \right) \right) \\ T_{i}(t+1) &= T_{i}(t) - \frac{1}{\tau_{i}} T_{i}(t)\Delta t + \frac{1}{\tau_{i}} u_{i}(t)\Delta t \end{split} \tag{1}\]
dimana \(i=0,\cdots,N_k\) dengan \(N_k\) adalah jumlah rangkaian kereta pada konvoi yang ditinjau, \(\Delta t\) adalah periode waktu diskrit, \(S_i(t)\) adalah posisi rangkaian kereta ke-i dengan kecepatan \(V_i(t)\) dan massa \(M_i\), \(\left(C_{0_i}+C_{1_i}V_i(t)+C_{2_i}V_i(t)^2\right)\) merepresentasikan gaya resistansi di setiap kereta, \(T_i(t)\) adalah torsi penggerak/pengereman terintegrasi setiap kereta, \(\tau_i\) adalah inersia dinamika longitudinal, \(R_i\) adalah diameter roda, \(\eta_{T,i}\) adalah
efisiensi mekanis sistem penggerak, g adalah konstanta gravitasi, dan f adalah gaya resistansi pengereman. Sinyal kontrol masukan \(u_i\) memiliki batasan berikut:
\[u_{min,i} \le u_i \le u_{max,i} \tag{2}\]
Dengan menentukan vektor variabel keadaan \(x_i(t) = [S_i(t), V_i(t), T_i(t)]^T\) dan vektor variabel keluaran \(y_i(t) = [S_i(t), V_i(t)]^T\), maka (1) dapat dituliskan sebagai berikut:
\[x_i(t+1) = \phi_i(x_i(t)) + \psi_i u_i(t)\]
\[y_i(t) = \gamma_i x_i(t)\]
(3)
dimana \(\psi_i = \begin{bmatrix} 0, 0, \left(\frac{1}{\tau_i}\right), \Delta t \end{bmatrix}^T\), \(\gamma_i = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \end{bmatrix}\), dan \(\phi_i(x_i)\) didefinisikan sebagai
\[\phi_{i} = \begin{bmatrix} S_{i}(t) + V_{i}(t)\Delta t \\ V_{i}(t) + \frac{\Delta t}{M_{i}} \left( \frac{\eta_{T,i}}{R_{i}} T_{i}(t) - \left( \left( C_{0_{i}} + C_{1_{i}} V_{i}(t) + C_{2_{i}} V_{i}(t)^{2} \right) + M_{i}gf \right) \right) \\ T_{i}(t) - \frac{1}{\tau_{i}} T_{i}(t)\Delta t \end{bmatrix}\] \[(4)\]
Definisikan variabel \(X(t) \in R^{3N\times 1}\), \(Y(t) \in R^{2N\times 1}\), \(U(t) \in R^{N\times 1}\) masing-masing sebagai vektor variabel keadaan, keluaran, dan masukan pada sistem. Maka (4) menjadi:
\[X(t+1) = \Phi(X(t)) + \Psi U(t)\]
\[Y(t) = \Gamma X(t)\] (5)
dimana \(\Phi = [\phi_1(x_i)^T, \phi_2(x_i)^T, \cdots, \phi_N(x_i)^T]^T \in R^{3N \times 1}, \ \Psi = \operatorname{diag}(\psi_1, \cdots, \psi_N) \in R^{3N \times N}, \ \operatorname{dan} \Gamma = I_N \otimes \gamma \in R^{2N \times 3N}.\)
2.2 Formulasi Permasalahan Pada Perancangan Pengontrol
Tujuan desain pengontrol pada model (1) adalah untuk memastikan setiap rangkaian kereta mampu melacak kecepatan kendaraan referensi di posisi paling depan sambil mempertahankan jarak aman antar kereta. Tujuan ini dapat diformulasikan sebagai:
\[\lim_{t \to \infty} ||v_i(t) - v_0(t)|| = 0\] \[\lim_{t \to \infty} ||s_{i-1}(t) - s_i(t) - d_{1-1,i}|| = 0\] (6)
dimana \(d_{i-1,i}\) adalah jarak aman antara kereta (i-1) dan i yang pada makalah ini diasumsikan bernilai konstan (\(d_{i-1,i}=d_0\) dengan \(d_0\) adalah konstanta positif). Pada model (1), indeks i=0 menyatakan kereta virtual referensi dengan posisi \(S_0(t)\) dan kecepatan \(V_0(t)\). Kereta i=0 diasumsikan memiliki kecepatan konstan sehingga variabel keadaan dan sinyal masukan yang diinginkan pada kereta \(i=1,2\cdots\) menjadi
\[x_{\text{des},i}(t) = \left[ S_{\text{des},i}(t), V_{\text{des},i}(t), T_{\text{des},i}(t) \right]^{T}\] \[u_{\text{des},i}(t) = T_{\text{des},i}(t)\] (7)
dimana \(S_{{\rm des},i}(t)=S_0(t)-i\). \(d_0\), \(V_{{\rm des},i}(t)=V_0\), dan \(T_{{\rm des},i}(t)=h_i(v_0)\) dengan \(h_i(v_0)\) adalah torsi untuk mengimbangi tarikan eksternal yand didefenisikan sebagai berikut:
\[h_i(v_0) = \frac{R_i}{\eta_{Ti}} \left( \left( C_{0_i} + C_{1_i} V_i(t) + C_{2_i} V_i(t)^2 \right) + M_i g f \right) \tag{8}\]
referensi sinyal keluaran menjadi \(y_{\text{des},i}(t) = \gamma x_{\text{des},i}(t)\). Pada makalah ini, pencapaian tujuan kontrol pada (6) dilakukan dengan metode kontrol model prediksi terdistribusi.
3 Perancangan Sistem Kontrol
3.1 Konsep Kontrol Model Prediksi
Kontrol Model Prediksi atau Model Predictive Control (MPC) merupakan metode kontrol berbasis model yang menggunakan sinyal prediksi (variabel keadaan, sinyal keluaran) pada horison waktu tertentu untuk menentukan sekuens sinyal kontrol optimal di durasi horizon prediksi tersebut (Gambar 5 [24]). Formulasi algoritme MPC pada umumnya dirancang berdasarkan model persamaan ruang keadaan serta indeks performansi sistem yang berbentuk fungsi kuadratik dari variabel keadaan dan sinyal masukan [24].
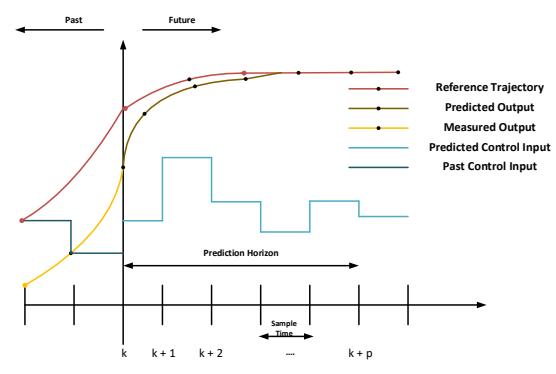
Gambar 5 Konsep MPC (diadaptasi dan digambar ulang berdasarkan [24]).
Tinjau dinamika sistem dengan model persamaan ruang keadaan waktu diskrit berikut:
\[x_{k+1} = f(x_k, u_k, z_k, p_k, p_{tv,k}),\]
\[y_k = h(x_k, u_k, z_k, p_k, p_{tv,k}).\]
(9)
dimana \(x_k\) dan \(y_k\) masing-masing menyatakan variabel keadaan dan keluaran sistem pada waktu diskrit k, \(u_k\) dan z masing-masing menyatakan sinyal kontrol dan fungsi aljabar dari variabel keadaan sistem pada waktu k, sedangkan \(p_k\) dan \(z_{tv,k}\) masing-masing menyatakan parameter bernilai tidak pasti atau berubah terhadap waktu pada sistem. Sinyal kontrol MPC merupakan solusi dari permasalah optimisasi berikut:
minimize \[\mathbf{x}_{0:N_p+1}, \mathbf{u}_{0:N_p}, \mathbf{z}_{0:N_p}\] \[m\left(x_{N_p+1}\right) + \sum_{k=0}^{N_p} l\left(x_k, z_k, u_k, p_k, p_{\mathrm{tv},k}\right)\] (10)
subject to: \[x_{0} = \hat{x}_{0}, \\ x_{k+1} = f(x_{k}, u_{k}, p_{k}, p_{\text{tv},k}), \quad \forall k = 0, \dots, N_{p} \\ g(x_{k}, u_{k}, p_{k}, p_{\text{tv},k}) \leq 0 \qquad \forall k = 0, \dots, N_{p} \\ x_{\text{lb}} \leq x_{k} \leq x_{\text{ub}}, \qquad \forall k = 0, \dots, N_{p} \\ u_{\text{lb}} \leq u_{k} \leq u_{\text{ub}}, \qquad \forall k = 0, \dots, N_{p} \\ z_{\text{lb}} \leq z_{k} \leq z_{\text{ub}}, \qquad \forall k = 0, \dots, N_{p}\] (11)
dimana \(N_p\) menyatakan horison prediksi dan \(\hat{x}_0\) adalah (estimasi) nilai awal pada waktu k=0 dari variabel keadaan (dapat ditentukan berdasarkan umpan balik pengukuran sensor \(y_k\)). Persamaan (10) menunjukkan bahwa sinyal kontrol pada metode MPC ditentukan sebagai nilai sinyal kontrol yang meminimumkan indeks performansi yang digambarkan oleh fungsi \(m(\cdot)\) dan \(l(\cdot)\). Fungsi \(m(\cdot)\) adalah kriteria performansi di waktu akhir \(N_p+1\) horizon prediksi sedangkan \(l(\cdot)\) kriteria kriteria performansi untuk setiap
waktu \(k \in [0,N_p]\). Proses minimisasi fungsi \(m(\cdot)\) dan \(l(\cdot)\) dilakukan dengan memperhitungkan batasan bahwa variabel keadaan sistem memenuhi model dinamika (9) serta asumsi variabel \((x_k,z_k,u_k)\) pada setiap k memiliki batas bawah \((x_{lb},z_{lb},u_{lb})\) dan atas \((x_{ub},z_{ub},u_{ub})\). Penentuan sinyal kontrol dapat juga memperhitungkan fungsi batasan \(g(\cdot)\) tertentu dari variabel dan parameter sistem. Solusi formulasi optimisasi (10)-(11) pada MPC ditentukan berdasarkan evaluasi secara iteratif nilai kriteria performansi sistem serta prediksi sinyal pada sistem (variabel keadaan, sinyal kontrol, dan keluaran) untuk setiap k dan nilai horison prediski berjalan (\(moving\ horizon\)) \(N_p\) sebagaimana diilustrasikan di Gambar 5 [24,25].
3.2 Desain Kontrol Model Prediksi Terdistribusi
Metode DMPC pada dasarnya adalah implementasi MPC konvensional (10)-(11) untuk sistem multi agen. Dalam konteks model (3), setiap kereta dianggap sebagai agen yang berinteraksi secara lokal dengan kereta lain di dekatnya dalam topologi komunikasi predecessor-follower (PF). Pada topologi PF, kereta i=0 memberi informasi ke kereta i=1, kereta i=1 memberi informasi ke kereta i=2, dan seterusnya. Formulasi DMPC mendefinisikan (10)-(11) di setiap kereta untuk mencapai tujuan seluruh kereta di (4).
Tinjau kembali model konvoi kereta (3). Definisikan indeks \(-i = \{i - 1, i + 1\}\) sebagai indeks kereta tetangga atau yang berdekatan dengan kereta ke-i. Dalam hal ini, sinyal keluaran dan masukan setiap kereta yang berdekatan dengan kereta ke-i adalah:
\[y_{-i}(t) = [y_{i1}^T(t) \dots y_{im}^T(t)]^T, \ u_{-i}(t) = [u_{i1}(t) \dots u_{im}^T(t)]^T\] (12)
Pada durasi \([t,t+N_P]\), algoritme DMPC meninjau tiga jenis sinyal keluaran, yaitu (i) sinyal keluaran terprediksi \(y_i^P(k\mid t)\), (ii) sinyal keluaran optimal \(y_i^*(k\mid t)\), (iii) asumsi sinyal keluaran. Dalam hal ini, tiga jenis sinyal masukan/kontrol dapat ditinjau, yaitu: (i) sinyal masukan terprediksi \(u_i^P(k\mid t)\), sinyal masukan terprediksi \(u_i^R(k\mid t)\), dan asumsi sinyal masukan \(u_i^R(k\mid t)\) terkait waktu cacah untuk horison \(k=0,\dots,N_P\). Untuk durasi waktu total \(t=0,\dots,N\) dan horison prediksi \(k=0,\dots,N_P\), formulasi DMPC setiap kereta \(i=0,\dots,N_k\) dapat ditentukan seperti di (13) [25].
minimize \[u_i^p(0|t),...,u_i^p(N_p-1|t)\] \(l_i(y_i^p,u_i^p,y_i^a,y_{-i}^a)\) subject to: \[x_i^p(k+1|t) = \phi_i\left(x_i^p(k|t)\right) + \psi_i \cdot u_i^p(k|t)\] \(y_i^p(k|t) = \gamma \cdot x_i^p(k|t)\) \(x_i^p(0|t) = x_i(t)\) \(u_i^p(k|t) \in \mathcal{U}_i\) \(y_i^p(N_p|t) = \frac{1}{|I_i|} \sum_j \left(y_j^a(N_p|t) + \tilde{d}_{i,j}\right)\) \(T_i^p(N_p|t) = h_i\left(v_i^p(N_p|t)\right)\)
dimana \(\left[u_i^p(0\mid t),...,u_i^p(N_p-1\mid t)\right]\) adalah sinyal kontrol yang dioptimalkan di setiap horison prediksi dan \(\tilde{d}_{i,j}=\left[d_{i,j},0\right]^T\) adalah vektor jarak aman yang diinginkan antara kereta ke-i dan ke-j. Formulasi (13) memperhitungkan dinamika prediksi berikut:
\[x_{i}^{p}(k+1 \mid t) = \phi_{i}(x_{i}^{p}(k \mid t)) + \psi_{i} \cdot u_{i}^{p}(k \mid t)\]\[y_{i}^{p}(k \mid t) = \gamma \cdot x_{i}^{p}(k \mid t)\](14)
dengan nilai awal \(x_i^P(0 \mid t) = x_i(t)\) dan \(u_i^P(k \mid t) \in U_i\). Penentuan sinyal kontrol optimal pada formulasi (13) ditujukan untuk meminimumkan indeks performansi pada (15).
\[l_{i}(y_{i}^{p}, u_{i}^{p}, y_{i}^{a}, y_{-i^{a}}) = \|y_{i}^{p}(k \mid t) - y_{\text{des},i}(k \mid t)\|_{Q_{i}} + \|u_{i}^{p}(k \mid t) - h_{i}(v_{i}^{p}(k \mid t))\|_{R_{i}} + \sum_{j} \|y_{i}^{p}(k \mid t) - y_{j}^{a}(k \mid t) - \widetilde{d_{i,j}}\|_{G_{i}}\] \[(15)\]
dimana \(Q_i\), \(R_i\), \(F_i\), dan \(G_i\) merupakan matriks pembobot bernilai definit positif. Algoritme DMPC untuk penentuan solusi formulasi (13) diringkaskan sebagai berikut [24,25]:
1. Inisiasi sinyal keluaran dan masukan untuk kereta ke-i sebagai berikut
\[u_i^a(k \mid 0) = h_i(v_i(0))\] \[y_i^a(k \mid 0) = y_i^p(k \mid 0), k = 0,1,\dots, N_p - 1\] (16)
dimana \(y_i^p\) ditentukan sebagai solusi dari dinamika kereta berikut:
\[x_i^p(k+1|0) = \phi_i(x_i^p(k|0)) + \psi_i \cdot U_i^a(k|0)\]
\[y_i^p(k|0) = \gamma(x_i^p(k|0)), x_i^p(0|0) = x_i(0)\]
(17)
- 2. Lakukan iterasi DMPC berikut untuk semua \(i = 0, ..., N_k\) dan t > 0:
- a) Hitung solusi \((u_i^*(k \mid t))\) dari (3) berdasarkan nilai \(x_i(t)\).
- b) Gunakan \(u_i^*(k \mid t)\) untuk menentukan variabel keadaan optimal \(x_i^*(k \mid t)\) pada horison prediksi \(N_P\) sebagai \(x_i^*(k+1 \mid t) = \phi_i(x_i^*(k \mid t)) + \psi_i \cdot u_i^*(k \mid t)\).
- c) Tentukan asumsi sinyal kontrol di waktu diskrit berikutnya sebagai berikut:
\[u_i^a(k|t+1) = \begin{cases} u_i^*(\,k+1\mid t\,), & k=0,1,\dots,N_p-2\\ h_i^*(\,v_i(N_p|t)) & k=N_p-1 \end{cases}\]
Gunakan \(u_i^a(\cdot)\) untuk menentukan asumsi variabel keadaan \(x_i^a(k|t+1)\) dan asumsi sinyal keluaran \(y_i^a(k|t+1)\) berdasarkan model dinamika di (3).
- d) Kirim nilai \(y_i^a(k|t+1)\) kepada dan terima \(y_{-i}^a(k|t+1)\) dari kereta terdekat, kemudian hitung \(y_{\text{des},i}^a(k|t+1)\) berdasarkan informasi kereta di depan.
- e) Implementasikan sinyal kontrol optimal sebagai \(u_i(t) = u_i^*(0|t)\)
- f) Set nilai t = t + 1 dan lakukan iterasi berulang dari langkah 2(a).
4 Simulasi Numerik
Bab ini menjelaskan simulasi numerik terkait evaluasi algoritma DMPC yang diajukan untuk skenario implementasi pada CBTC. Pada simulasi, diasumsikan terdapat tujuh (7) kereta pada konvoi dengan topologi komunikasi PF. Nilai awal variabel keadaan ditentukan sebagai \(S_0(t)=0\), \(V_0=30~m/s\), \(S_i(t)=V_i(t)=0\) untuk \(i=1,\cdots,7\), serta nilai parameter di Tabel 1. Batas sinyal kontrol (torsi) ditentukan sebagai percepatan (perlambatan) maksimum \(a_{max,i}=30~m/s^2\) (\(a_{min,i}=-30~m/s^2\)). Referensi nilai jarak aman antar kereta ditentukan sebagai \(d_{i-1,i}=100~\)meter. Simulasi dilakukan dengan menggunakan periode waktu diskrit \(\Delta t=0.1\) detik dan horison prediksi \(N_P=20\).
Gambar 6 (kiri) mengilustrasikan deviasi jarak aman antar kereta dari nilai referensi \(d_{i-1,i}\) yang diperoleh dengan algoritme DMPC yang diusulkan. Terlihat bahwa deviasi maksimum pada kondisi transien terbatas di rentang \(\mp 15~cm\) dan kemudian berkurang hingga menuju nol secara asimptotik. Seperti ditunjukkan di Gambar 6 (kanan), konvoi kereta bergerak dengan jarak aman yang sesuai dengan kriteria referensi yang diinginkan dan dengan kecepatan yang sama. Dalam hal ini, dapat disimpulkan bahwa metode DMPC yang diusulkan mampu memastikan setiap rangkaian kereta pada konvoi untuk melacak
kecepatan kendaraan referensi di posisi paling depan sambil mempertahankan jarak aman referensi dengan kereta terdekat lainnya. Lebih jauh, sebagaimana ditunjukkan pada Gambar 7, profil akselerasi dan torsi setiap kereta juga bernilai nol ketika konvoi telah mencapai nilai jarak aman antar kereta yang sesuai dengan nilai referensi −1, yang ditentukan. Hasil simulasi ini mengilustrasikan efektivitas algoritme DMPC yang diusulkan untuk pengoperasian konvoi kereta api dengan teknologi CBTC berbasis sistem persinyalan blok bergerak.
Tabel 1 Nilai parameter pada model (3)
| 𝑖 | 𝑀𝑖 (𝑘𝑔) | 𝐶0𝑖 | 𝐶1𝑖 | 𝐶2𝑖 | 𝜏𝑖(𝑁𝑚) | 𝑅𝑖(𝑚) |
|---|---|---|---|---|---|---|
| 1 | 20546.8 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.36 | 1.23 |
| 2 | 20957.5 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.49 | 1.25 |
| 3 | 20964.88 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.49 | 1.25 |
| 4 | 20157.61 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.25 | 1.21 |
| 5 | 20970.59 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.49 | 1.25 |
| 6 | 20957.16 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.49 | 1.25 |
| 7 | 20485.37 | 7.6658e − 3 | 1.08e − 4 | 2.06e − 5 | 6.35 | 1.22 |
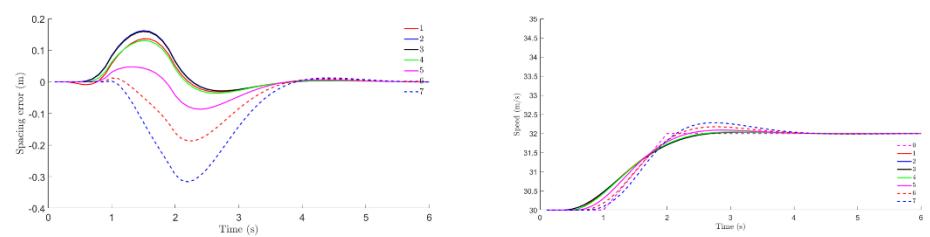
Gambar 6 Deviasi jarak aman antar kereta (kiri) dan profil kecepatan setiap kereta.
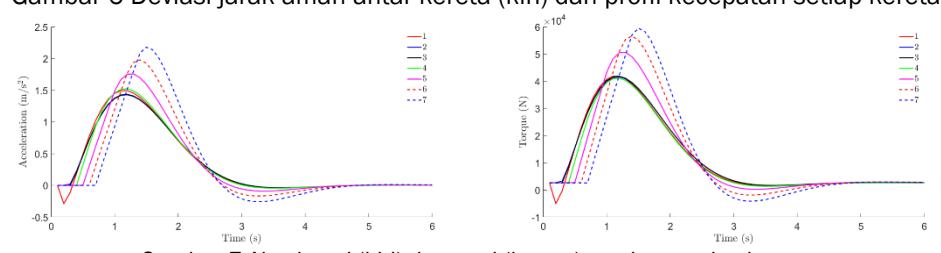
Gambar 7 Akselerasi (kiri) dan torsi (kanan) masing-masing kereta.
5 Kesimpulan
Makalah ini memaparkan implementasi metode kontrol model prediksi terdistribusi atau DMPC untuk pengontrolan dinamika kereta api berbasis teknologi CBTC. Tujuan implementasi metode DMPC yang ditinjau adalah untuk memastikan setiap rangkaian kereta pada konvoi mampu melacak nilai kecepatan referensi tertentu sambil menjaga nilai jarak aman referensi dengan kereta lain. Hasil simulasi numerik menunjukkan efektivitas metode DMPC yang diusulkan dalam mencapai tujuan yang diinginkan. Penelitian lanjutan direncanakan untuk melakukan evaluasi terkait metode dan hasil simulasi yang dipaparkan di makalah ini di simulator sistem CBTC skala laboratorium.
6 Referensi
- [1] Johan, Al, Transformasi Pengelolaan Kereta Commuter Jabodetabek Diakses pada 30- Apr-2019 dari www.kompasiana.com/aljohan/transformasi-pengelolaan-keretacommuter-jabode tabek?page=all.
- [2] Jatmiko, B. P., PT KCI Perbanyak Rangkaian KRL 12 Gerbong. Diakses pada 30-Apr-2019 dari https://ekonomi.kompas.com/read/2018-pt-kci-perbanyak-rangkai an-krl-12-gerbong.
- [3] Badan Pusat Statistik,Jumlah Penumpang Kereta Api, 2006-2019. Diakses pada 30- Apr-2019 dari https://www.bps.go.id/linkTableDinamis/view/id/ 815.
- [4] Pusat Data Ekonomi & Bisnis Indonesia, Berapa Penumpang KRL Jabodetabek ?, Diakses pada 30-Apr-2019 dari https://databoks.katadata.co.id/.
- [5] Baohau, M., et al., "Signalling layout for fixed-block railway lines with real-coded genetic algorithms" , HKIE Transactions, vol. 13, no. 1, pp. 35–40, 2006.
- [6] Sunomo, H.S.P. & Haryanto, D., "Sistem pensinyalan transportasi kereta api dengan visualisasi posisi menggunakan teknologi gps (global positioning system)", Universitas Negeri Yogyakarta, Yogyakarta-Indonesia, 2007.
- [7] Rhandyverizarie, Mengenal CBTC, Sistem Persinyalan Canggih di MRT Jakarta, Diakses pada 30-Apr-2019 dari: https://scrollitmedia.wordpress.com/2018/07/ 21/mengenal-cbtc-sistempersinyalan-canggih-di-mrt-jakarta/ .
- [8] Pascoe, R.D. & Eichorn, T.N., "What is communication-based train control?", IEEE Vehicular Technology Magazine, vol. 4, no. 4, pp. 16–21, 2009.
- [9] Larsson, M., "Sensor fusion application to railway odometry", KTH Royal Institute of Technology, Swedia, 2014.
- [10] Mirabadi, A., Mort, N., & Schmid, F., "Application of sensor fusion to railway systems", Proceedings IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems, pp. 185–192, 1996.
- [11] Takagi, R., "Synchronisation control of trains on the railway track controlled by the moving block signalling system", IET Electrical Systems in Transportation, vol. 2, no. 3, pp. 130–138, 2012.
- [12] Yang, C.-D. & Sun, Y.-P., "Robust cruise control of high speed train with hardening/ softening nonlinear coupler", Proceedings of American Control Conference, pp. 2200– 2204, 1999.
- [13] Zhuan, X. & Xia, X., "Speed regulation with measured output feedback in the control of heavy haul trains", Automatica, vol. 44, no. 1, pp. 242–247, 2008
- [14] Chou, M., Xia, X., & Kayser, "Modelling and model validation of heavy-haul trains equipped with electronically controlled pneumatic brake systems", Control Engineering Practice, vol. 15, no. 4, pp. 501–509, 2007.
- [15] Dong, H., Gao, S., Ning, B. & Li, L., "Extended fuzzy logic controller for high speed train", Neural Computing and Applications, vol. 22, no. 2, pp. 321–328, 2013.
- [16] C.-D. Yang & Y.-P. Sun, "Mixed H2/H∞ cruise controller design for high speed train", International Journal of Control, vol. 74, no. 9, pp. 905–920, 2001.
- [17] Faieghi, M. et al., "Robust adaptive cruise control of high speed trains", ISA Transactions, vol. 53, no. 2, pp. 533–541, 2014.
- [18] Liu, R. & Golovitcher, I., "Energy-effcient operation of rail vehicles", Transportation Research Part A: Policy and Practice, vol. 37, no. 10, pp. 917–932, 2003.
- [19] Astolfi, A. & Menini, L., "Input/output decoupling problems for high speed trains", Proceedings of American Control Conference, pp. 549–554, 2002.
- [20] Gao, S. et al, "Approximation based robust adaptive automatic train control: An approach for actuator saturation", IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 4, pp. 1733–1742, 2013.
- [21] Tao, T. & Xu, H., "Fault-tolerant control of high-speed trains with uncertain parameters and actuator failures using control reallocation and adaptive control", Journal of Information and Computational Science, vol. 10, pp. 1959–1977, 2013.
- [22] Xun, J. et al., "Cooperative control of high-speed trains for headway regulation: A selftriggered model predictive control based approach", Transportation Research Part C: Emerging Technologies, vol. 102, pp. 106–120, 2019.
- [23] Bersani, C. et al., "Rapid, robust, distributed evaluation and control of train scheduling on a single line track", Control Engineering Practice, vol. 35, pp. 12–21, 2015.
- [24] Lucia, S. & Fiedler, F. , Basics of model predictive control, Sphinx, 2020. Diakses pada 30-Apr-2019 dari https://www.do-mpc.com/en/latest/theory_mpc.html# basics- ofmodel-predictive-control
- [25] Zheng, Y. et al, Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies, IEEE Transactions on Control Systems Technology, vol. 25, no. 3, pp. 899–910, 2016.