
1 Pendahuluan
Komponen penggerak mulai dari peralatan elektronik rumah tangga yang berdaya rendah, materi pelajaran bahkan sampai pada pemanfaatan di dunia industri dengan daya tinggi banyak menggunakan motor listrik. Sesuai hukum kekekalan energi, motor listrik mengubah energi listrik menjadi energi gerak. Motor listrik dapat dikategorikan berdasarkan sumber energi listrik ang dipakai menjadi motor DC dan motor arus bolak-balik / Alternating Current (AC) yang masing-masing memiliki kelebihan dan kekurangan [1]. Pengontrolan kecepataan [2, 3] pada motor DC relatif lebih mudah, namun lebih sulit untuk perawatannya terutama jenis brushed. Di sisi lain, kecepatan motor AC [4] lebih rumit untuk dikontrol dan karakteristiknya tidak linier bergantung frekuensi arus bolak-balik yang digunakan. Oleh karena itu motor DC akan digunakan dalam pengembangan sistem kontrol yang akurat pada makalah ini.
Penelitian sistem kontrol motor DC perlu diawali model yang akurat [5] dalam fungsi transfer atau pun state-space sehingga dapat mengimplementasikan teori kontrol terkini seperti adaptif [6, 7] dan robust [8] secara tepat. Model yang baik dapat diterapkan optimalisasi [9] sehingga menghasilkan teknik kontrol terbaik. Perumusan model dapat diturunkan dari teori komponen elektronika penyusun motor listrik seperti resistansi dan induktansi. Selain itu, sifat fisika mekanika seperti momen inersia dan torsi motor juga mempengaruhi model sistem kontrolnya. Namun model dari perumusan teori motor perlu
divalidasi dengan hasil eksperimen. Teknik identifikasi model dari data eksperimen [5] sebagai fungsi input dan output dapat mendekati akurasi eksperimen itu sendiri. Tegangan listrik motor sebagai nilai input sedangkan fungsi output berupa kecepatan putar motor DC. Pengembangan model sistem kontrol kecepatan motor DC baik dengan perumusan teori dan identifikasi model eksperimen menarik untuk dibahas pada makalah ini.
Quanser QUBE-Servo 2 [10] merupakan fasilitas pembelajaran motor DC yang dapat dimanfaatkan untuk meneliti pemodelan sistem kontrolnya. Bahkan, produk ini telah dimanfaatkan dalam penelitian sistem kontrol tingkat internasional [11, 12, 13]. Tidak hanya memiliki data spesifikasi motor DC untuk perumusan teori tetapi juga dapat terhubung dengan software Matlab dan Simulink sehingga berbagai teknik pemodelan dan validasi eksperimen dapat dilakukan. Sinyal tegangan listrik ke motor DC dapat dikontrol dari Personal Computer (PC) melalui amplifier. Sensor sudut terpasang sebagai umpan balik pengukur posisi motor. Besaran waktu tersimpan pada timer yang terhubung pada PC tersebut. Oleh karena itu, QUBE-Servo 2 menawarkan sarana pembelajaran yang baik untuk pengembangan model sistem kontrol kecepatan sudut motor DC.
Metode kontrol kalang tertutup PID [14] yang telah popular di dunia pendidikan dan industri akan diterapkan dalam eksperimen ini dalam merancang model sistem kontrol. Tujuan penelitian ini adalah untuk mendapatkan model dengan akurasi terbaik dengan mengkaji perbandingan perumusan teori dan identifikasi model teknik kontrol kecepatan sudut motor DC. Selain model berbasis perumusan teori, perbandingan variasi bentuk fungsi transfer hasil identifikasi model akan diinvestigasii tingkat akurasinya sebagai kebaharuan penelitian pada pembahasan makalah ini.
2 Dasar Teori dan Metode Eksperimen
Motor DC tersusun dari komponen elektronika dan mekanik (mekatronika). Terlihat pada gambar 1 diagram system motor DC dimana gear motor terhubung dengan gear lainnya.
Gambar 1 Fasilitas belajar dan penelitian pemodelan sistem kontrol kecepatan motor DC dengan QUBE-Servo 2
Komponen elektronika seperti resistor dan induktor yang dialiri arus listrik akibat adanya tegangan listrik melalui motor DC pada Gambar 2. Energi listrik melalui tegangan elektromotif (back-emf) diubah menjadi energi gerak berupa kecepatan sudut.
\[E_b = K_m.\omega\] (1)
Gambar 2 Diagram mekatronika penyusun motor DC
Kecepatan sudut merupakan perubahan sudut dalam suatu waktu.
\[\omega = \frac{d\theta}{dt} \tag{2}\]
Motor DC yang memiliki komponen mekanik seperti inersia ikut memutarkan kedua gear yang memiliki nilai inersia masing-masing (lihat Gambar 1). Momen inersia pula dapat dihitung dari massa dan jari-jari gearnya, misal gear pengubung berikut ini:
\[J_{a} = \frac{1}{2} m_{a} . r_{a}^{2} \tag{3}\]
Begitu pula dengan inersia gear beban. Oleh karena itu momen inersia efektif sistem kontrol motor DC sebanding dengan resultannya.
\[J_{ef} = J_m + J_a + J_b \tag{4}\]
Torsi motor DC berhubungan dengan inersia dan turunan kecepatan sudutnya.
\[\tau = J_{ef} \cdot \frac{d\omega}{dt} \tag{5}\]
Arus listrik yang mengalir juga sebanding dengan torsi yang dihasilkan.
\[\tau = K_{\rm m}.i \tag{6}\]
Sesuai hukum II Kirchhoff pada suatu rangaian tertutup bahwa total beda potensial / tegangannya adalah nol.
\[\Sigma V = 0 \tag{7}\]
Dengan kata lain, jumlah Gaya Gerak Listrik (GGL) dan jumlah penurunan tegangan juga sama dengan nol. Hal ini berarti tidak ada energi listrik yang hilang dalam rangkaian atau semua energi listrik digunakan yang diperkuat hukum kekekalan energi.
\[\Sigma E + iR = 0 \tag{8}\]
Rangkaian listrik tertutup pada gambar 2 dianalisa dengan hukum II Kirchhoff sebagai berikut:
\[V - iR - L\frac{di}{dt} - E_b = 0\] (9)
\[V - iR - L\frac{di}{dt} - k_m.\omega = 0\] (10)
\[V - k_{m}.\omega = i.R + L\frac{di}{dt}\] (11)
Perancangan model matematis pada sistem kontrol biasanya digunakan fungsi transfer yaitu perbandingan output dan input suatu sistem pada domain Laplace. Pada penelitian ini, fungsi transfer (lihat Gambar 3) didapatkan dari sistem identifikasi yang mengaplikasikan teknik statistika untuk membuat model matematis suatu sistem dinamis berdasarkan hubungan data terukur baik input dan output [15]. Sistem identifikasi menawarkan perancangan optimal dari data eksperimen untuk model yang efisien.
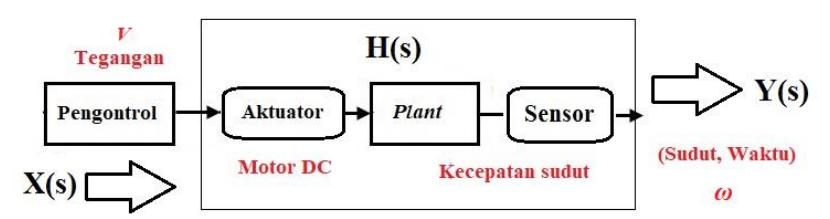
Gambar 3 Diagram fungsi transfer
\[H(s) = \frac{Y(s)}{X(s)} \tag{12}\]
Persamaan pada rumus (11) nilai tegangan (V) yang diberikan PC melalui amplifier dapat dijadikan input (X(s)) dan kecepatan sudut (\(\omega\)) terukur oleh sensor dapat dijadikan sebagai fungsi output (Y(s)) untuk merancang model sistem kontrol berupa fungsi transfer (H(s)) sesuai persamaan (12) dengan metode sistem identifikasi berbasis data eksperimen pada diagram di gambar 4..
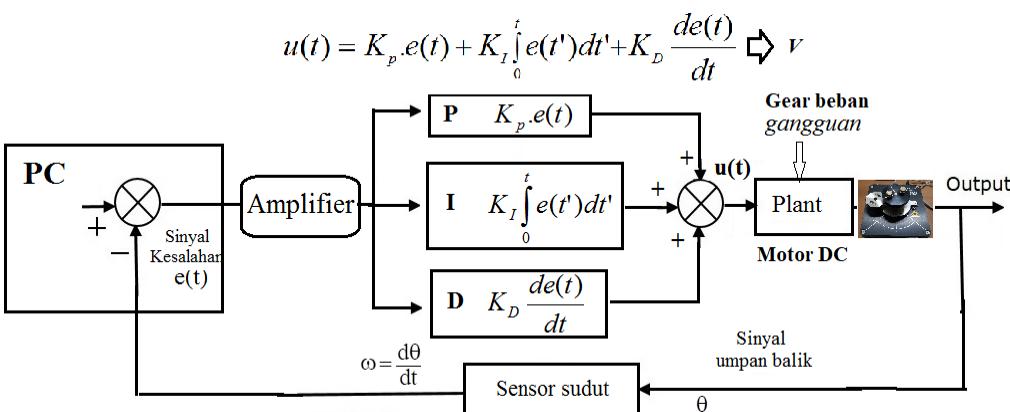
Gambar 4 Diagram teknik identifikasi model sistem kontrol dari data eksperimen
Teknik statistik sistem identifikasi mengestimasi model dengan meminimalkan error antara output model dan hasil eksperimen yang terukur.
\[Y_{\text{model}}(t) = \text{H.u}(t) \tag{13}\]
Oleh itu perbedaan antara output model dan output terukur atau error menjadi sangat kecil sekecil mungkin memanfaatkan perhitungan statistik dengan software Matlab.
\[e(t) = y_{meas}(t) - y_{mode}I(t)\] (14)
Pada eksperimen ini menggunakan kalang tertutup dengan metode PID yang berusaha meminimalkan kesalahan setiap waktu dengan pengaturan output pengendali u(t) berupa tegangan dengan penjumlahan tiap koefisien gain PID. Nilai gain PID telah diatur untuk mendapatkan nilai optimal yang diharapkan yaitu \(K_P=1.4\), \(K_I=0.005\) dan \(K_D=0.001\) pada
percobaan ini.
Gambar.5. Instalasi eksperimen kontrol kecepatan sudut motor DC
PC mengirimkan sinyal perintah melalui amplifier untuk mensuplai tegangan dan arus dalam menggerakkan motor DC. Putaran sudut diukur menggunakan sensor [8] berupa encoder sebagai elemen umpan balik dalam sistem kontrol. Kecepatan sudut dapat dihitung dari perubahan data pengukuran sudut per satuan waktu.
3 Hasil dan Pembahasan
Berikut ini hasil pemodelan perumusan teori pada persamaan (11) yang dibandingkan dengan hasil ekperimen.
Terlihat pada Gambar 6, tahap respon model perumusan teori menyerupai hasil eksperimen dengan nilai terkontrol pada 3.25 rad/s. Namun nampak hasil eksperimen terjadi overshoot sampai sekitar 3.75 rad/s pada waktu 0.4 s. Di sisi lain, model hasil perumusan teori menghasilkan sinyal yang ideal dengan tidak terjadi overshoot dan fluktuasi lebih kecil. Kedua hasil kecepatan sudut saling berhimpitan pada waktu setelah 0,75 s walau hasil eksperimen lebih fluktuatif.
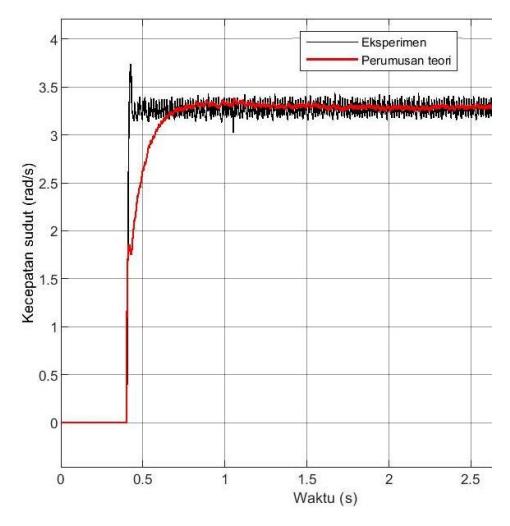
Gambar 6 Hasil perbandingan model perumusan teori dengan eksperimen
Fungsi transfer pada persamaan (12) dengan metode identifikasi sesuai Gambar 4 pada sistem kontrol kalang tertutup teknik PID terealisasi dengan numerator dan denominator berpangkat 1 masing-masing berikut ini :
\[\frac{-0,09442.s + 60,02}{s + 18.81} \tag{15}\]
Model fungsi transfer berpangkat 1 hasil teknik identifikasi pada rumus (15) dibandingkan dengan hasil eksperimen pada Gambar 6 tersebut. Model identifikasi berpangkat satu lebih baik dalam menyerupai hasil ekperimen daripada model perumusan teori sebelumnya. Tidak hanya fluktuasi sinyal tahap respon tetapi juga terjadi overshoot (lihat Gambar 7). Walaupun nilai overshoot hanya mencapai sekitar 3,2 rad/s yang masih di bawah hasil eksperimen. Selanjutnya kedua sinyal berhampiran pada nilai terkontrol setelah 0,5s dengan fluktuasi yang lebih mendekati. Hasil kecocokan fungsi transfer (15) berpangkat 1 dengan hasil eksperimen memiliki akurasi sekitar 87,45%.
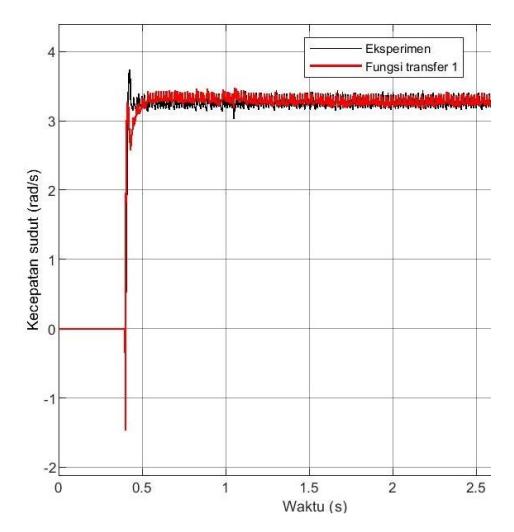
Gambar 7 Hasil perbandingan model identifikasi pangkat 1 dengan eksperimen
Teknik sistem identifikasi model dari data ekperimen juga dapat diatur untuk membentuk fungsi transfer dengan denominator berpangkat 2 karena memanfaatkan ilmu statistika guna mendapatkan model optimal yang diinginkan.
\[\frac{-27,05.s+1,214e04}{s^2+169.s+3812}\] (16)
Untuk validasi, model fungsi transfer berpangkat 2 tersebut pada rumus (16) dibandingkan dengan hasil eksperimen pada gambar 8 di bawah ini.
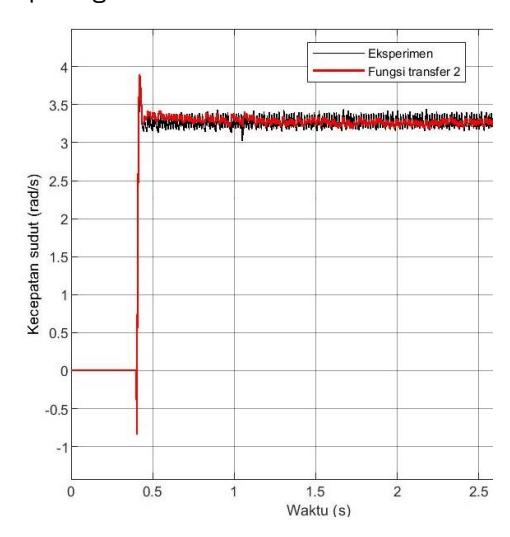
Gambar 8 Hasil validasi model identifikasi pangkat 2 dengan eksperimen
Grafik pada Gambar 8 menjelaskan bahwa model fungsi transfer berpangkat 2 hasil metode sistem identifikasi memiliki tahap respon sinyal yang paling mendekati dengan hasil eksperimen. Overshoot dan fluktuasi sinyal keduanya hampir menyerupai. Walaupun model identifikasi pada fungsi transfer berpangkat 2 lebih rumit namun hasilnya paling mendekati eksperimen dengan akurasi kecocokan data mencapai 93,78%.
Perumusan model dari hitungan teori ternyata lebih jauh berbeda dari validasi eksperimen. Hal ini terjadi mungkin diakibatkannya ada suatu faktor yang berpengaruh namun belum dimasukkan terutama pada persamaan (11). Hasil model identifikasi pada fungsi transfer berpangkat 1 cenderung lebih mendekati model perumusan teori motor DC pada rumus (11) karena sama-sama merupakan persamaan linier berpangkat 1. Hasil ekperimen sistem kontrol kecepatan sudut motor DC dengan metode PID cenderung tidak linier sehingga lebih mendekati model identifikasi pada fungsi transfer berpangkat 2. Peningkatan akurasi ketepatan data model identifikasi sebesar 6,3% terjadi dengan bertambahnya 1 pangkat pada fungsi transferya.
4 Kesimpulan dan Saran
Model identifikasi berupa fungsi transfer berhasil dirancang dari data eksperimen sistem kontrol kecepatan sudut motor DC dengan kalang tertutup teknik PID. Model hasil perumusan teori komponen mekatronika penyusun motor DC agak berbeda dengan hasil eksperimen terutama pada fenomena overshoot dan fluktuasi sinyal. Hasil ekperimen tidak seideal model perumusan teori dengan akurasi rendah sehingga perlu perbaikan dalam merumuskan teori motor DC-nya. Fungsi transfer berpangkat 2 hasil sistem identifikasi paling mendekati hasil eksperimen sesungguhnya dengan akurasi 93,78% yang cenderung non linier sehingga layak digunakan sebagai rujukan model pada sistem kontrol kecepatan motor DC dibandingkan model identifikasi berpangkat 1 yang memiliki akurasi 87,45%.
5 Nomenklatur
- V = tegangan listrik yang diaplikasikan pada motor DC melalui power supply (Volt)
- Eb = GGL motor DC (Volt)
- i = Arus listrik yang melalui motor DC (Ampere)
- R = Resistansi pada motor DC, 8,4 (Ohm)
- L = Induktansi pada motor DC, 1,16x10-3 (Henri)
- Km = Konstan motor DC, 0.042 V/(rad/s)
- ω = Kecepatan sudut motor DC (rad/s)
- θ = Sudut putar motor (rad)
- t = Waktu (s)
- Jm = Momen inersia rotor, 4,0x10-6 (kg.m2)
- Ja = Momen inersia gear penghubung (kg.m2)
- Jb = Momen inersia gear beban (kg.m2)
- Jef = Momen inersia effektif motor DC (kg.m2)
- ma = Massa gear penghubung, 0,0106 (kg)
- mb = Massa gear beban, 0,053 (kg)
- ra = Radius gear penghubung, 0,0111 (m)
- rb = Radius gear beban, 0,0248 (m)
- X(s) = Sinyal input/ denominator
- H(s) = Fungsi transfer
- Y(s) = Sinyal output/ numerator
- s = Frekuensi komplek
- Ymodel(t) = Output model.
- u(t) = Sinyal input
- Ymeas(t) = Output terukur hasil eksperimen.
6 Referensi
- [1] Muchlas, M., Sunardi, S., & Antoro, T. (2006). Pengendalian kecepatan motor dc dengan metode look up table berbasis mikrokontroler at89c51. TELKOMNIKA: Indonesian Journal of Electrical Engineering, 4(1).
- [2] Asrizal, A., Yulkifli, Y., & Sovia, M. (2012). Penentuan Karakteristik Sistem Pengontrolan Kelajuan Motor DC dengan sensor Optocoupler Berbasis Mikrokontroler AT89S52. Oto. Ktrl. Inst (J. Auto. Ctrl. Inst): Penentuan Karakteristik Sistem Pengontrolan Kelajuan Motor DC dengan Sensor Optocoupler Berbasis Mikrokontroler AT89S52, 4(1), 7-17.
- [3] Prakosa, J. A., Samokhvalov, D. V., Ponce, G. R., & Al-Mahturi, F. S. (2019, January). Speed control of brushless DC motor for quad copter drone ground test. In 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus) (pp. 644-648). IEEE.
- [4] Kartika, E., & Hastuti, H. (2020). Sistem Monitoring dan Kontrol Motor AC 3 Phasa Melalui Inverter dengan Protokol Modbus Menggunakan Visual Basic Berbasis Atmega 2560. JTEV (Jurnal Teknik Elektro dan Vokasional), 6(2), 204-211.
- [5] Prakosa, J. A., Kurniawan, E., Adinanta, H., Suryadi, S., & Purwowibowo, P. (2020, November). Experimental Based Identification Model of Low Fluid Flow Rate Control Systems. In 2020 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET) (pp. 200-205). IEEE.
- [6] Prakosa, J. A., & Vtorov, V. B. (2019). Experimental studies of adaptive control to stabilize the automatic unmanned mini quad rotor helicopter position. Journal of Advanced Research in Dynamical and Control Systems, 11(S4), 1983-1994..
- [7] Kurniawan, E., Cao, Z., & Man, Z. (2014). Digital design of adaptive repetitive control of linear systems with time-varying periodic disturbances. IET Control Theory & Applications, 8(17), 1995-2003.
- [8] Prakosa, J. A., & Stotckaia, A. D. (2019). The H-infinity robust control for optimization on low water flow application. Journal of Advanced Research in Dynamical and Control Systems, 11(S4), 1995-2006.
- [9] Muhammad, R. D., & Rahmat, R. (2020). Desain Kontrol Motor Dc Menggunakan Ant Colony Optimization. Jurnal Teknologi (Jurtek), 12(1), 49-56.
- [10] Apkarian, J., Lévis, M., Martin, P., STUDENT WORKBOOK QUBE-Servo 2 Experiment for MATLAB /Simulink Users Standardized for ABET* Evaluation Criteria. 2016 Quanser Inc., Kanada.
- [11] Kurniawan, E., Adinanta, H., Harno, H. G., Prakosa, J. A., Suryadi, S., & Purwowibowo, P. (2020). On the synthesis of a stable and causal compensator for discrete-time high-order repetitive control systems. International Journal of Dynamics and Control, 1-10.
- [12] Lee, H. S., & Ryu, S. (2020). Design of a robust controller for a rotary motion control system: disturbance compensation approach. Microsystem Technologies, 1-10.
- [13] Mani, G. (2020). Implementation of ACO tuned modified PI-like position and speed control of DC motor: an application to electric vehicle. In Soft Computing for Problem Solving (pp. 629-645). Springer, Singapore.
- [14] J. A. Prakosa, E. Kurniawan, H. Adinanta, S. Suryadi, M. I. Afandi, " Kajian Eksperimen Teknik Kontrol Penerbangan Posisi Tinggal Landas Drone Bikopter dengan Metode PID", Jurnal Otomasi, Kontrol, dan Instrumentasi},12(2),pp.1-8, 2020
- [15] Ozdemir, A. A., & Gumussoy, S. (2017). Transfer function estimation in system identification toolbox via vector fitting. IFAC-PapersOnLine, 50(1), 6232-6237.