
1 Pendahuluan
Industri peternakan ayam berkembang secara cepat sejalan dengan semakin tinggi konsumsi telur maupun daging ayam di masyarakat. Industri peternakan ayam tentunya membutuhkan alat-alat pendukung untuk keberlangsungan kegiatan peternakan tersebut. Dari alat pemberi pakan, alat pemberi minuman, pengatur suhu ruangan, penerangan dan lainnya. Dari semua alat itu dapat dijalankan dengan cara manual (konvensional) maupun secara otomatis. Contoh kegiatan yang dilakukan secara konvensional adalah memberi makan dengan cara menaburkan pakan di sepanjang kandang, kemudian berpindah ke kandang lainnya (kasus ayam petelur) [1]. Biasanya alat pendukung yang dapat berjalan secara otomatis mempunyai harga yang cukup tinggi. Penulis berkeinginan untuk mengembangkan alat-alat pendukung di bidang peternakan tersebut. Salah satunya adalah alat pemberi vitamin secara otomatis. Dengan adanya kemajuan teknologi diharapkan kerja peternak semakin efektif dan efisien [2].
Pemberian vitamin pada ayam sangat diperlukan untuk menjaga kebugaran dari ayam tersebut, sehingga ayam tetap sehat. Biasanya vitamin diberikan dengan cara manual oleh pengelola kandang. Pengembangan alat pemberi vitamin sangat diperlukan agar mendukung sistem kerja industri peternakan menuju yang lebih baik. Dalam penelitian ini akan dibatasi dulu dalam pengujian kalibrasi pembacaan nilai volume. Kalibrasi sendiri adalah kegiatan membandingkan alat uji dengan alat yang sudah standar. Alat uji yang digunakan adalah waterflow sensor yang ditunjukkan pada Gambar 1, sedangkan alat standar yang digunakan adalah gelas ukur yang ditunjukkan pada Gambar 2. Waterflow sensor di dalamnya terdiri dari rotor dan juga sensor hall effect. Rotor dapat bergerak
ketika ada suatu aliran air yang mengalir, sedangkan prinsip utama kerja dari sensor ini adalah dengan memanfaatkan sensor hall effect [3].
Gambar 1. Waterflow sensor
Gambar 2. Gelas ukur kapasitas 1000 mL
Solenoid Valve juga digunakan dalam penelitian (ditunjukkan pada Gambar 3), secara umum valve ini mempunyai dua saluran. Saluran yang pertama adalah untuk masukan zat cair dan saluran lainnya untuk keluaran. Prinsip kerja dari solenoid valve adalah sama dengan prinsip buka tutup kran, namun di valve ini buka tutup diatur dengan tegangan DC [3]. Mikrokontroler yang digunakan dalam penelitian ini adalah ATmega328 dengan papan pengembang Arduino Uno R3. Spesifikasi detail ditunjukkan pada Tabel 1.
Tabel 1. Spesifikasi Arduino Uno R3 [4]
| No. | Detail Arduino Uno R3 | Keterangan |
|---|---|---|
| 1 | Mikrokontroller | ATmega328 |
| 2 | Tegangan operasi | 5V (Tegangan input yang disarankan 7-12 V) |
| 3 | Batas tegangan input | 6-20 V |
| 4 | Jumlah pin I/O digital | 14 |
| 5 | Jumlah pin analog | 6 |
| 6 | Arus DC tiap pin I/O | 40 mA |
| 7 | Arus DC untuk pin 3.3 V | 50 mA |
| 8 | SRAM | 2kB |
| 9 | EEPROM | 1kB |
| 10 | Clock speed | 16 MHz |
Gambar 3. Solenoid valve
2 Metode
Alat dan bahan yang digunakan dalam penelitian ini terdiri dari tandon air dan vitamin, pompa air, solenoid valve, relay, waterflow sensor, wadah penampung serta mikrokontrolernya menggunakan papan pengembang Arduino Uno R3. Keseluruhan sistem kerja digambarkan melalui blok diagram kerja sistem pada gambar 4.
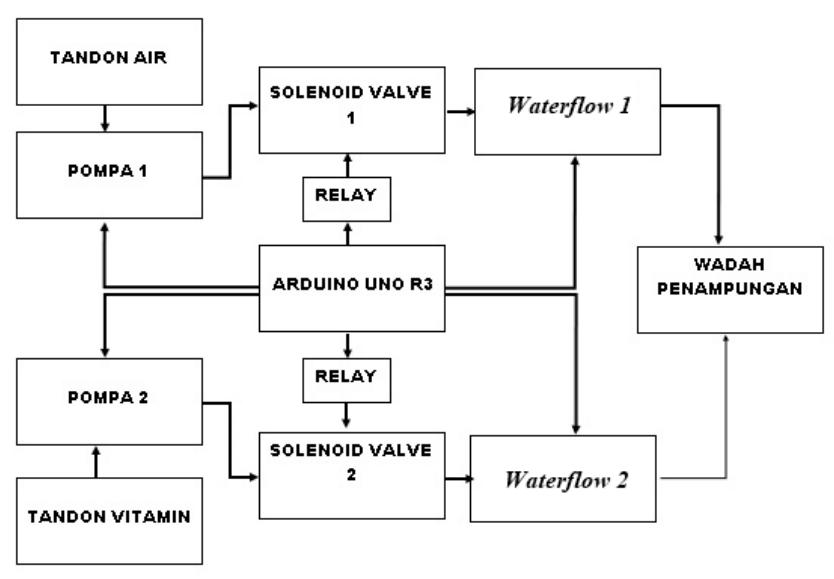
Gambar 4. Blok diagram kerja sistem
Dari gambar 4 dapat ditunjukkan bahwa sistem terdiri dari dua bagian. Bagian pertama adalah untuk distribusi air dan bagian lainnya untuk distribusi vitamin. Keduanya akan bercampur menjadi satu di bagian wadah penampung. Pompa digunakan untuk mempercepat aliran dari tandon air maupun tandon vitamin. Hal ini dipertimbangkan karena jika tidak menggunakan pompa maka aliran akan sangat lambat sehingga tidak terbaca oleh waterflow sensor. Jalannya sistem adalah dengan cara mengatur batas volume diprogram sejumlah 500 mL pada masing-masing waterflow sensor. Ketika volume sudah mencapai batas setting program 500 mL maka pompa dan solenoid valve akan tidak aktif (off). Perlu diperhatikan bahwa peneliti harus mempertimbangkan system dari waktu respon solenoid valve ketika membuka dan menutup. Jika tidak diatur, memungkinkan hasil akan menyimpang jauh dari setting program yang ditentukan sehingga akan lebih banyak nilai errornya. Kemudian kalibrasi dilakukan dengan cara membandingkan hasil masing-masing keluaran volume dari kedua jalur distribusi yang tertampung pada suatu wadah (dalam hal ini dihitung sebelum tercampur di wadah penampung) dengan gelas ukur. Detail pengujian ditunjukkan pada Gambar 5 dan gambar real alat ditunjukkan pada Gambar 6.
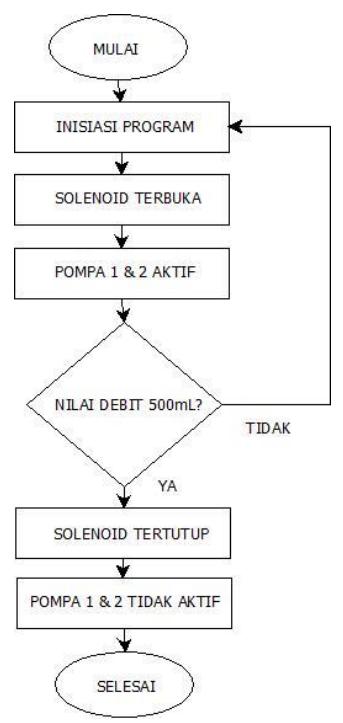
Gambar 5. Diagram alir penelitian
Gambar 6. Keseluruhan rangkaian alat 50ystem pemberi vitamin
Persamaan-persamaan yang digunakan dalam menganalisis hasil data ditunjukkan berikut:
\[\%Error = \frac{|Standar - Uji|}{Standar} \times 100\% \tag{1}\]
\[Akurasi = 100\% - \%Error \tag{2}\]
%Koevisien Variasi (KV) = \[\frac{\Delta X}{\bar{X}} \times 100\%\] (3)
dengan ∆ adalah standar deviasi dan ̅ adalah rata-rata variabel X
\[Presisi = 100\% - \%KV \tag{4}\]
\[Ketidak pastian Repeatibility = \frac{\Delta X}{\sqrt{n}}\] (5)
dengan n adalah jumlah data
3 Hasil
Hasil penelitian ditunjukkan pada Tabel 2 bahwa nilai standar yang ditentukan adalah sebesar 500 mL. Kemudian proses kalibrasi dilakukan dengan membandingkan hasil standar dan sensor. Terlihat masing-masing sensor menunjukkan perbedaan dalam nilai rata-rata dan standar deviasi (sebaran nilai data) walaupun tidak terlalu jauh selisihnya. Detail analisis data ditunjukkan pada Gambar 7 dan Tabel 3.
Tabel 2. Hasil Pengambilan Data Penelitian
| DATA HASIL KALIBRASI | ||||||
|---|---|---|---|---|---|---|
| Hasil Pembacaan (mL) | ||||||
| Pengukuran Ke | Standard | Sensor 1 | Sensor 2 | |||
| 1 | 500 | 503 | 508 | |||
| 2 | 500 | 502 | 502 | |||
| 3 | 500 | 505 | 502 | |||
| 4 | 500 | 502 | 503 | |||
| 5 | 500 | 503 | 504 | |||
| 6 | 500 | 507 | 502 | |||
| 7 | 500 | 506 | 505 | |||
| 8 | 500 | 505 | 505 | |||
| 9 | 500 | 503 | 504 | |||
| 10 | 500 | 503 | 506 | |||
| Rata-rata | 500 | 503.9 | 504.1 | |||
| Standar Deviasi | 0 | 1.729 | 1.969 | |||
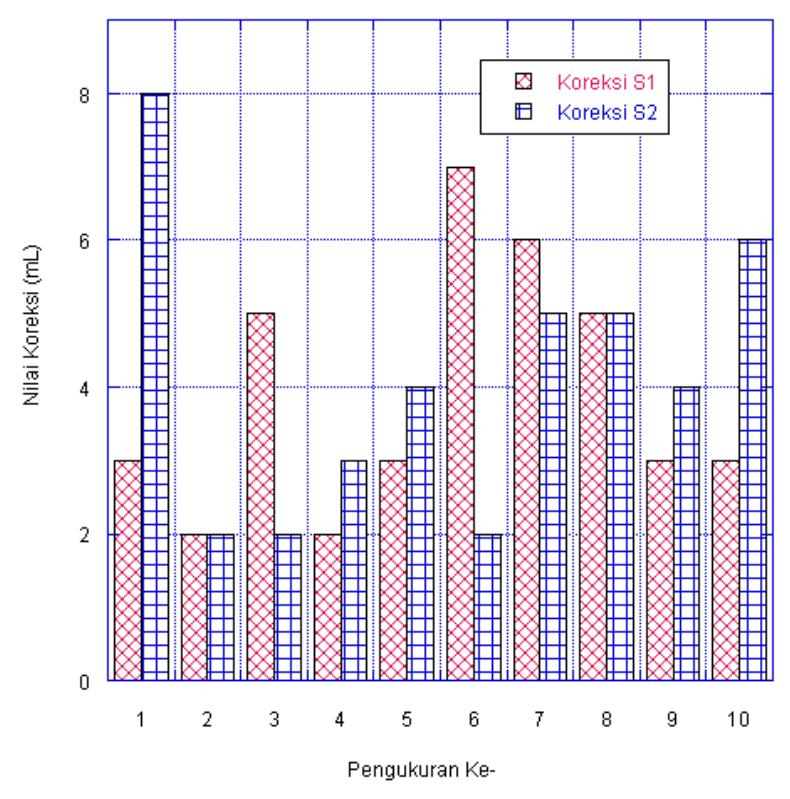
Gambar 7. Grafik perbandingan perulangan pengukuran vs niai koreksinya
Tabel 3. Analisis nilai error dan akurasi sensor
| Pengukuran ke | Error S1 (%) | Error S2 (%) | Akurasi S1(%) | Akurasi S2 (%) |
|---|---|---|---|---|
| 1 | 0.006 | 0.016 | 99.994 | 99.984 |
| 2 | 0.004 | 0.004 | 99.996 | 99.996 |
| 3 | 0.01 | 0.004 | 99.99 | 99.996 |
| 4 | 0.004 | 0.006 | 99.996 | 99.994 |
| 5 | 0.006 | 0.008 | 99.994 | 99.992 |
| 6 | 0.014 | 0.004 | 99.986 | 99.996 |
| 7 | 0.012 | 0.01 | 99.988 | 99.99 |
| 8 | 0.01 | 0.01 | 99.99 | 99.99 |
| 9 | 0.006 | 0.008 | 99.994 | 99.992 |
| 10 | 0.006 | 0.012 | 99.994 | 99.988 |
| Rata-Rata | 0.0078 | 0.0082 | 99.99 | 99.99 |
Dari Gambar 7 ditunjukkan bahwa nilai koreksi yang paling tinggi ada pada sensor 2 yaitu mencapai 8 mL, sedangkan yang terendah hanya 2 mL saja. Selanjutnya hasil pengolahan data pada Tabel 3 memperlihatkan juga bahwa nilai akurasi kedua sensor sangat baik yaitu mencapai lebih dari 99%, begitu juga untuk nilai presisi yang ditunjukkan pada Tabel 4. Nilai presisi juga menunjukkan nilai lebih dari 99%. Akurasi didapatkan dari hasil perhitungan menggunakan persamaan 2 yang berkaitan dengan error. Error dapat muncul karena berbagai macam sebab, bisa dikarenakan dari kondisi lingkungan, proses pengambilan data, personil yang melakukan pengambilan data [5].
| NILAI | |||
|---|---|---|---|
| SENSOR KE | Presisi S1 (%) | U repeat | |
| 1 | 99.99 | 0.55 | |
| 2 | 99.99 | 0.62 | |
Tabel 4. Nilai presisi sensor
Nilai akurasi menunjukkan ketepatan hasil pengukuran dengan nilai sebenarnya, sedangkan presisi berkaitan dengan seberapa dekat hasil ukur (dengan kondisi yang sama) jika dilakukan perulangan pengambilan data. Artinya dengan prosedur yang sama, alat yang sama, kondisi yang sama, lokasi yang sama dan dilakukan dalam waktu yang berdekatan [5]. Kemudian untuk nilai ketidakpastian perulangan menunjukkan selisih yang kecil juga. Terlihat sensor 1 mempunyai nilai ketidakpasian perulangannya yang lebih kecil dibandingkan dengan sensor 2. Menurut Joint Committee for Guides in Metrology (JCGM) ketidakpastian pengukuran sebenarnya menjelaskan mengenai nilai yang terdapat dalam rentang suatu hasil ukur [6]. Hasil pengukuran yang disertai dengan nilai ketidakpastian tentunya akan memiliki nilai pengukuran yang lebih terpercaya [7]. Dari keseluruhan pengolahan data, dapat dilaporkan hasil rata-rata Volume setiap sensor adalah
- 1. Waterflow sensor 1: (. ± . )
- 2. Waterflow sensor 2: (. ± . )
Nilai ketidakpastian dalam pelaporan tersebut masih berfokus hanya pada salah satu perhitungan perulangan saja yang sebenarnya bisa diruntut juga dari nilai kalibrasi sertifikat gelas ukur (tidak dimasukkan dalam peneltitian ini).
4 Kesimpulan
Kesimpulan dari penelitian ini menunjukkan bahwa kedua waterflow sensor mempunyai nilai akurasi dan presisi yang sangat baik yaitu di atas 99% untuk pengujian 500mL. Penulis juga memprediksi sensor tersebut juga akan memiliki nilai akurasi dan presisi yang baik juga di pengujian volume yang lain. Hasil pembacaan serta nilai ketidakpastian sensor satu dan dua secara berturut-turut adalah sebesar (503.90 ± 0.55) dan (504.10 ± 0.62).
5 Referensi
- [1] Warjono, S., Astuti, S., Maulana, F., Lestari, I. Pengatur Pakan dan Penerangan Kandang Terprogram untuk Ayam Petelur. ORBITH. Vol. 14. No.2. 91-96, 2018.
- [2] Arifin, A.S. dan Puriyanto R.D. Rancang Bangun Pemberian Pakan Ayam Petelur Otomatis Menggunakan PLC. Buletin Ilmiah Sarjana Teknik Elektro, Vol.1. No.1. 19-26, 2019.
- [3] Sutono. Monitoring Distribusi Air Bersih. Jurnal Ilmiah Setrum. Vol.5., No.1.p-ISSN:2301-4652, 2016.
- [4] Sokop, J.S., Mamahit, D.J., Sompie, S.R.U.A. Trainer Periferal Antarmuka Berbasis Mikrokontroller Arduino Uno. E-Jurnal Teknik Elektro dan Komputer. Vol.5.No.3.ISSN : 2301-8402, 2016.
- [5] Gupta, S.V.2012. Measurement Uncertainties, Physical Parameter and Calibrations of Instrument, Springer, New York, ISBN 978-3-642-20988-8.
- [6] JCGM. Evaluation of Measurement Data-Guide to the Expression of uncertainty in measurement. First Edition. France, 2008.
- [7] Setyawan, G., dan Lestari, P.I.T..Pengauh Kontribusi Ketidakpastian Terhadap Pelaporan Nilai Porositas Menggunakan Mteode Gravimetri, .Jurnal Ilmu Fisika (JIF), Vol.9, No.2, 2017.