
1 Pendahuluan
Trem otonom merupakan salah satu inovasi untuk moda transportasi publik yang menggabungkan karakteristik kereta dengan bis. Trem otonom beroperasi di jalan raya dengan menggunakan jalur virtual [1] dan merupakan trem yang dirancang dengan tujuan diantaranya adalah sifat ramah lingkungan karena trem beroperasi dengan menggunakan superkapasitor [2]. Agar trem otonom dapat beroperasi di jalan raya, maka trem menggunakan berbagai macam sensor untuk keperluan penentuan posisi atau lokalisasi dari trem, teknologi kecerdasan buatan untuk mendeteksi objek penghalang dan rambu lalu lintas dan sekaligus juga menghindari objek, dan penggunaan metode metoda kontrol tertentu agar dapat bergerak secara terkontrol di jalan raya, seperti misalnya dengan menerapkan metoda kontrol untuk pengikut jalur (line following control).
Penelitian mengenai kontrol pengikut jalur sudah dilakukan pada kasus pengontrolan truk trailer. Pada penelitian tersebut, truk trailer dikontrol pergerakannya agar dapat mengikuti suatu garis virtual [3]. Selain kontrol pengikut jalur, penelitian mengenai implementasi penggunaan deep learning pada kendaraan bergerak lainnya, seperti misalnya mobil otonom, bus otonom dan lainnya sudah dilakukan untuk mendeteksi objek penghalang [4].
Makalah ini akan membahas mengenai pengembangan trem otonom tanpa rel dengan tujuan yang ingin dicapai adalah trem mampu berjalan mengikuti jalur virtual yang sudah ditetapkan dan mampu mendeteksi objek penghalang serta rambu lalu lintas. Konsep penglihatan stereo (stereo vision) digunakan pada peneitian ini karena konsep ini bersifat efektif untuk keperluan deteksi yang bersifat non kontak [5]. Metode kontrol pengikut jalur yang diterapkan pada penelitian ini adalah logika fuzzy. Penggunaan metode LoS pada penelitian ini dimaksudkan agar lokomotif trem dapat mengikuti orientasi dari vektor LoS. Dengan demikian, jarak antara trem otonom terhadap segmen garis yang diikuti dapat diminimumkan sehingga trem otonom tanpa rel dapat mengikuti jalur virtual yang sudah ditentukan dengan optimal.
1.1 Penerapan Metoda Kecerdasan Buatan
Untuk menerapkan teknik pengontrolan dan pendeteksian objek pada perancangan trem otonom maka perlu digunakan metoda kecerdasan buatan seperti teknik logika fuzzy dan Jaringan Syaraf Tiruan [6]. Logika fuzzy adalah transisi dari kebenaran mutlak ke kebenaran parsial yang menggeneralisasi logika klasik dua nilai dengan mengizinkan nilai kebenaran parsial dari proposisi diwakili oleh angka dalam interval 0 sampai 1. Logika fuzzy memungkinkan untuk mengolah data selayaknya manusia. Secara umum himpunan fuzzy dapat menggambarkan nilai-nilai kebenaran dari suatu proporsi dalam bentuk fungsi. Sementara itu, Jaringan syaraf tiruan (JST) merupakan sistem pemroses informasi yang terinspirasi oleh cara kerja sistem syaraf manusia [6].
Salah satu keunggulan dari JST adalah melakukan proses pembelajaran yang dinamik dari pengenalan bentuk atau pola. Pada dasarnya JST secara pokok tersusun oleh banyak neuron, yang diasumsikan merepresentasikan neuron-neuron yang ada diotak manusia, yang saling terkoneksi satu sama lain secara komputasional dengan melalui beberapa lapisan (layer), yang disebut dengan lapisan masukan, tersembunyi dan keluaran, dengan struktur dasar seperti yang diperlihatkan pada Gambar 1 [6].
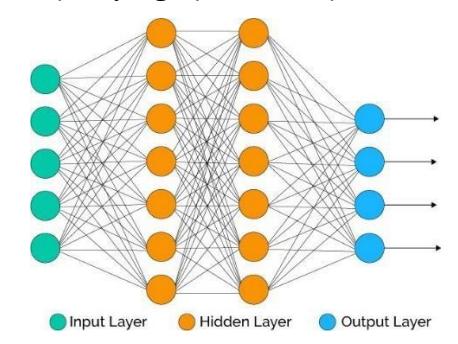
Gambar 1. Struktur dasar Jaringan Saraf Tiruan
1.2 SSD-Mobilenet
Untuk melakukan pendeteksian objek, maka penelitian ini menggunakan konsep MobileNet, yang menerapkan konvolusi depthwise separable [7]. Konvolusi depthwise separable adalah bentuk dari konvolusi terfaktorisasi yang memfaktorkan konvolusi standar menjadi konvolusi depthwise dan konvolusi pointwise [8]. Single Shot Multibox Detector (SSD) adalah metode yang digunakan untuk mendeteksi objek pada suatu gambar dengan menerapkan neural network untuk menghasilkan lokalisasi dan klasifikasi [8]. Lapisan jaringan dasar pada SSD menggunakan arsitektur konvolusional standar yang digunakan untuk klasifikasi gambar. Lapisan konvolusional menghasilkan suatu lapisan yang disebut dengan lapisan ekstraksi filter untuk melakukan klasifikasi kelas suatu objek. SSD melakukan klasifikasi objek dengan cara konvolusi terhadap data masukan gambar. Konvolusi ini bertujuan untuk melakukan ekstraksi fitur dan memperkecil dimensi data agar komputasi lebih ringan.
1.3 Penglihatan Stereo
Metode pengukuran stereoskopik adalah sebuah metode pengukuran jarak dengan menggunakan dua buah kamera identik. Dua buah kamera identik digunakan untuk menimbulkan efek kedalaman sehingga jarak antara objek penghalang dengan kamera dapat diketahui. Pengukuran jarak objek dapat dihitung berdasarkan perbedaan relatif dari posisi objek pada masing–masing gambar yang ditangkap kamera, seperti yang diperlihatkan pada Gambar 2.
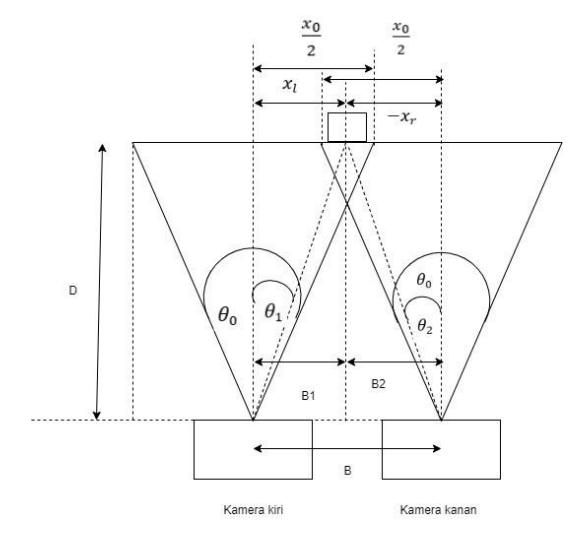
Gambar 2. Skema Penglihatan Stereo
Berdasarkan gambar tersebut, jarak antara objek dengan kamera dapat dihitung dengan menggunakan persamaan sebagai berikut [9]:
\[D = \frac{Bx_0}{2\tan\left(\frac{\theta_0}{2}\right)(x_l - x_D)}\] (1)
2 Perancangan Pengontrol dan Sistem Pendeteksi Objek
2.1 Deskripsi Sistem
2.1.1 Model Kinematika Kereta tanpa Rel
Gambar skematik trem tanpa rel ditentukan untuk mendapatkan rumus kinematika dari trem tanpa rel. Selain itu, gambar skematik dari trem tanpa rel diperlukan untuk menentukan error yang akan digunakan sebagai masukan pada pengontrol fuzzy. Karena trem memiliki kemudi dan tergolong sebagai kendaraan berbadan jamak, model skematik trem tanpa rel didekati oleh model skematik truk dengan dua buah trailer seperti diperlihatkan pada Gambar 3.
Gambar 3. Skematik trem tanpa rel
Dengan menggunakan pendekatan model kinematika truk dengan dua buah trailer, persamaan kinematika untuk trem tanpa rel dapat dirumuskan sebagai berikut [10].
\[\dot{\theta_0} = \frac{v \tan U}{L_0} \tag{2}\]
\[\theta_1 = \theta_0 - \theta_2 \tag{3}\]
\[\dot{\theta_2} = \frac{v \sin \theta_1}{L_2} \tag{4}\]
\[\theta_3 = \theta_2 - \theta_4 \tag{5}\]
\[\dot{\theta_4} = \frac{v\cos\theta_1\sin\theta_3}{L_2} \tag{6}\]
\[\dot{x} = v.\cos\theta_0 \tag{7}\]
\[\dot{y} = v. \sin \theta_2 \tag{8}\]
\[x_1 = x - L_1 \cdot \cos \theta_0 - L_2 \cos \theta_2 \tag{9}\]
\[y_1 = y - L_1 \sin \theta_0 - L_2 \sin \theta_2 \tag{10}\]
\[x_2 = x_1 - L_1 \cdot \cos \theta_2 - L_2 \cos \theta_4 \tag{11}\]
\[y_2 = y_1 - L_1 \sin \theta_2 - L_2 \sin \theta_4\] (12)
Pada trem tanpa rel, gerakan trem diasumsikan hanya berada pada bidang XoY. Berdasarkan persamaan kinematika tersebut, sudut orientasi dari lokomotif (0), orientasi gerbong pertama (2), orientasi gerbong kedua (4), serta koordinat dalam bidang XoY dipengaruhi oleh kecepatan lokomotif (v) dan sudut kemudi (U). Selain itu, sudut orientasi dan posisi lokomotif beserta gerbong dalam sistem koordinat XoY dipengaruhi oleh dimensi 0, 1, dan 2. 1 menyatakan dimensi panjang dari titik sambung ke sumbu roda belakang, 2 menyatakan dimensi panjang dari titik sambung ke sumbu roda belakang pada gerbong pertama, dan 0 menyatakan dimensi panjang dari sumbu roda depan ke sumbu roda belakang pada lokomotif. Koordinat dari gerbong pertama dan kedua berturut – turut dinyatakan oleh B (1, 1) dan C (2, 2).
2.1.2 Metode Line of Sight
Pada kasus kontrol pengikut jalur ini, trem tanpa rel bergerak maju sehingga vektor LoS merupakan sebuah vektor garis yang menghubungkan koordinat lokomotif trem atau A (x, y) dengan titik referensi atau P (, ) yang terletak pada segmen garis yang diikuti. Titik (, ) merupakan proyeksi dari posisi lokomotif sehingga titik referensi dapat dihitung dengan menggunakan persamaan sebagai berikut [10].
\[(x_T - x_P)^2 + (y_T - y_P)^2 = (k.L)^2\] (13)
\[\frac{y_T - y_p}{x_T - x_P} = \frac{y_{i+1} - y_i}{x_{i+1} - x_i} \tag{14}\] dengan k merupakan bilangan positif dan L merupakan dimensi total dari panjang kereta tanpa rel. Titik (, ) dan +1 (+1, +1) merupakan dua buah titik yang terletak pada segmen garis yang diikuti. Titik referensi tersebut diperbarui dengan waktu sampling tertentu. Lintasan yang diikuti oleh trem tanpa rel terdiri dari banyak segmen garis sehingga diperlukan mekanisme pergantian segmen garis. Pergantian segmen garis yang diikuti dilakukan ketika pertidaksamaan berikut terpenuhi [10].
\[(x - x_i)^2 + (y - y_i)^2 \le R^2\] (15)
Ketika lokomotif dari trem tanpa rel berada di dalam lingkaran dengan radius R, segmen garis berikutnya dengan titik (, ) dan +1 (+1, +1) akan dipilih.
2.1.3 Sistem Pendeteksi Objek
Trem tanpa rel dilengkapi dengan sistem pendeteksi objek berupa dua buah kamera identik dan algoritma deep learning. Sebelum diterapkan pada trem tanpa rel, sistem dilatih dengan menggunakan data gambar berjumlah 1200 yang terdiri atas enam jenis objek meliputi miniatur mobil, orang, truk, serta rambu-rambu stop, belok kanan, dan belok kiri. Algoritma yang digunakan untuk tahap pelatihan adalah SSD Mobilenet [9]. Diagram alir dari tahap pelatihan algoritma deteksi objek diperlihatkan pada Gambar 4.
2.2 Desain Pengontrol Fuzzy
Pengontrol fuzzy dirancang agar sudut error e1 dan e2 (lihat Gambar 3.) bernilai nol sehingga trem tanpa rel dapat bergerak mengikuti jalur virtual yang sudah ditetapkan. Masukan dari pengontrol fuzzy dirumuskan sebagai berikut.
\[e1 = \theta - \theta 0 \tag{16}\]
\[e2 = \theta 0 - \theta 4 \tag{17}\]
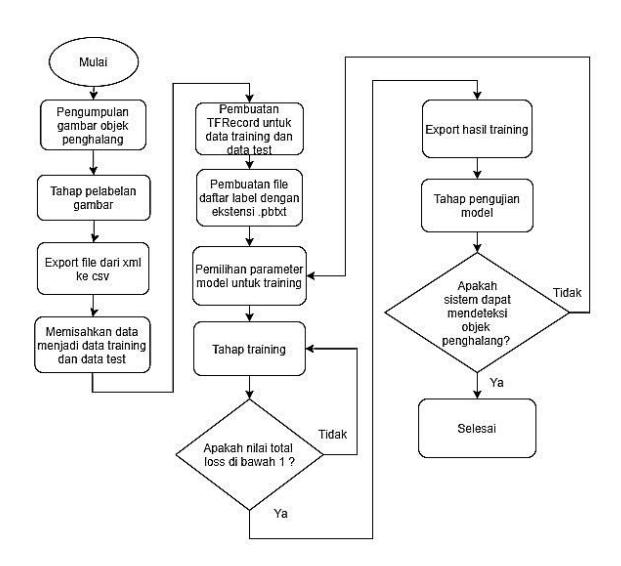
Gambar 4. Diagram alir pelatihan algoritma deteksi objek
sedangkan keluaran dari pengontrol fuzzy adalah sudut kemudi lokomotif, U. Untuk perancangan pengontrol fuzzy tersebut maka variabel linguistik dari e1, e2, dan U didefiniskan sebagai berikut.
\[e1 = \{NB, NS, Z, PS, PB\}\]
\(e2 = \{N, Z, P\}\)
\(U = \{NB, NS, Z, PS, PB\}\)
Variabel linguistik NB, NS, N, Z, P, PS, dan PB masing – masing menyatakan Negative Big, Negative Small, Negative, Zero, Positive, Positive Small, dan Positive Big. Dari berbagai pertimbangan serta pengamatan yang dilakukan, maka aturan fuzzy untuk kontrol pengikut jalur pada kereta tanpa rel dapat disusun sebagai berikut.
- 1. IF (e1 is NB) AND (e2 is N) THEN U is NB
- 2. IF (e1 is NB) AND (e2 is Z) THEN U is NB
- 3. IF (e1 is NB) AND (e2 is P) THEN U is NB
- 4. IF (e1 is NS) AND (e2 is P) THEN U is NS
- 5. IF (e1 is NS) AND (e2 is Z) THEN U is NS
- 6. IF (e1 is NS) AND (e2 is N) THEN U is NS
- 7. IF (e1 is Z) AND (e2 is N) THEN U is Z
- 8. IF (e1 is Z) AND (e2 is Z) THEN U is Z
- 9. IF (e1 is Z) AND (e2 is P) THEN U is Z
- 10. IF (e1 is PS) AND (e2 is P) THEN U is PS
- 11. IF (e1 is PS) AND (e2 is Z) THEN U is PS
- 12. IF (e1 is PS) AND (e2 is N) THEN U is PS
- 13. IF (e1 is PB) AND (e2 is N) THEN U is PB
- 14. IF (e1 is PB) AND (e2 is Z) THEN U is PB
- 15. IF (e1 is PB) AND (e2 is P) THEN U is PB
Metode minimum dan maksimum digunakan untuk keperluan inferensi sedangkan metode Center of Area (CoA) digunakan untuk proses defuzzifikasi. Agar tram dapat bergerak mengikuti jalur yang telah ditentukan, titik – titik pada segmen garis akan dimasukkan ke dalam komputer dan komputer akan menerima data berupa sudut orientasi dari kereta melalui komunikasi secara nirkabel. Komputer akan menghitung error sudut orientasi dan memasukkan nilai error tersebut ke dalam pengontrol fuzzy. Output yang dihasilkan berupa sudut kemudi yang dikirim ke kereta melalui komunikasi nirkabel. Diagram blok sistem kontrol pengikut jalur untuk trem tanpa rel tersebut dapat dilihat pada Gambar 5., yang terdiri atas sistem pengontrol untuk kecepatan dan sistem pengontrol untuk kemudi.
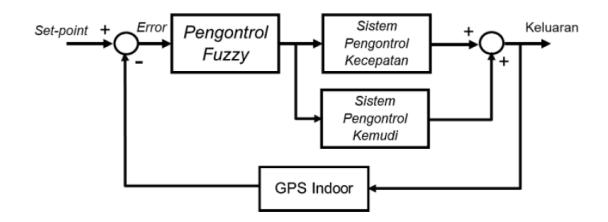
Gambar 5. Diagram blok sistem kontrol pengikut jalur untuk trem tanpa rel
Diagram blok untuk sistem pengontrol kecepatan dan sistem pengontrol kemudi, dimana masing-masing menggunakan pengontrol jenis Proporsional dan Integral (PI) diperlihatkan pada Gambar 6. Untuk pengontrolan kemudi, potensiometer digunakan sebagai umpan balik sudut kemudi sedangkan sensor rotary encoder digunakan sebagai umpan balik kecepatan pada pengontrolan kecepatan. GPS indoor digunakan sebagai umpan balik posisi pada Gambar 5.
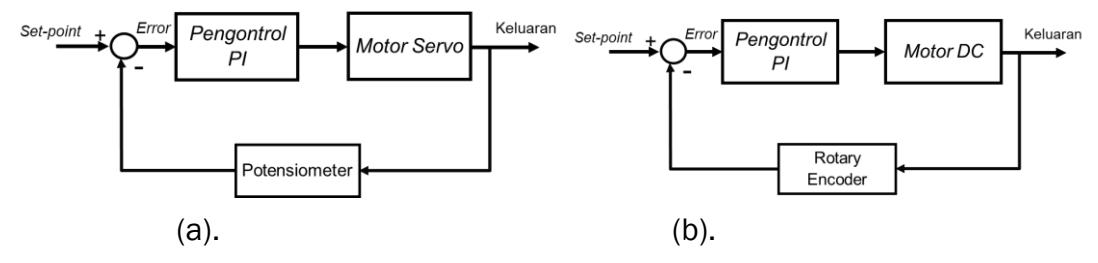
Gambar 6. Diagram blok untuk (a). sistem pengontrol kemudi dan (b). kecepatan
3 Hasil-hasil Studi Simulasi
3.1 Simulasi Pengontrol Fuzzy
Simulasi pengontrol fuzzy dilakukan secara numerik dengan menggunakan persamaan (2) hingga persamaan (12). Simulasi dilakukan dengan kecepatan rendah dan konstan, yaitu 0,1 m/s. Titik–titik pada segmen– segmen garis yang diikuti adalah sebagai berikut.
\[w0(1,0), w1(4,1), w2(4,5), w3(8,5), w4(8,0), w5(12,0)\]
sedangkan rentang nilai dari variabel linguistik diberikan dalam besaran-besaran berikut.
\[e1 \in \{-\pi, \pi\}, e2 \in \{-\frac{\pi}{2}, \frac{\pi}{2}\}, \cup \{-\frac{\pi}{3}, \frac{\pi}{3}\}\]
Pada studi simulasi, maka nilai k yang dipilih adalah sebesar 0,5. Parameter berupa dimensi panjang yang dipilih merupakan dimensi pada miniatur kereta yang digunakan pada penelitian ini. Parameter-parameter tersebut adalah diberikan oleh
\[L0 = 0.15 m, L2 = 0.19 m, L1 = 0.03 m\]
Kondisi awal kereta adalah sudut orientasi dari gerbong dan lokomotif, yaitu sebesar 00 dan kereta berada sejauh 1 m di atas segmen garis yang akan diikuti, dan besarnya waktu sampling yang digunakan adalah 1 detik. Pergerakan kereta tanpa rel pada bidang XoY diperlihatkan pada Gambar 7, dengan grafik besarnya error yang dihasilkan, yaitu error e1 dan e2 diperlihatkan pada Gambar 12.
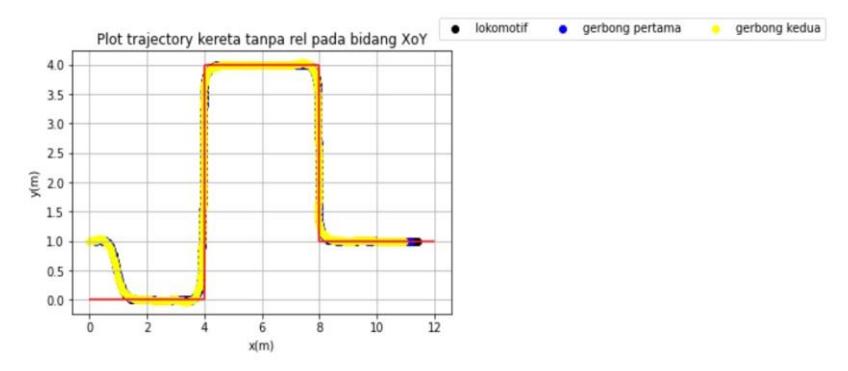
Gambar 7. Plot pergerakan trem tanpa rel
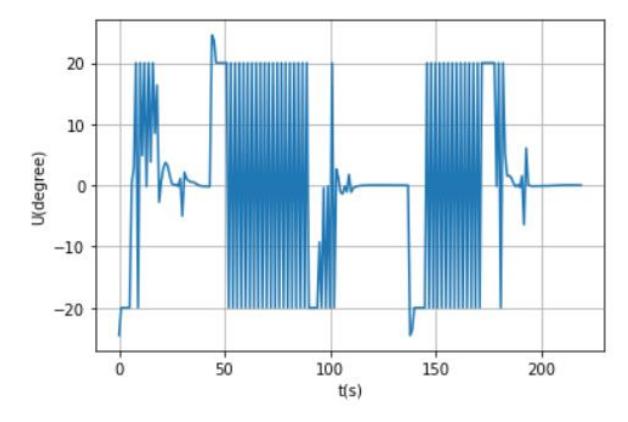
Gambar 8. Grafik sudut kemudi terhadap waktu
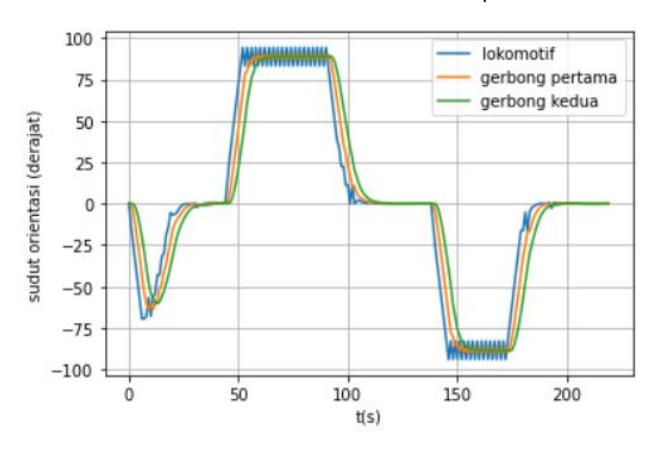
Gambar 9. Grafik sudut orientasi dari lokomotif dan gerbong terhadap waktu
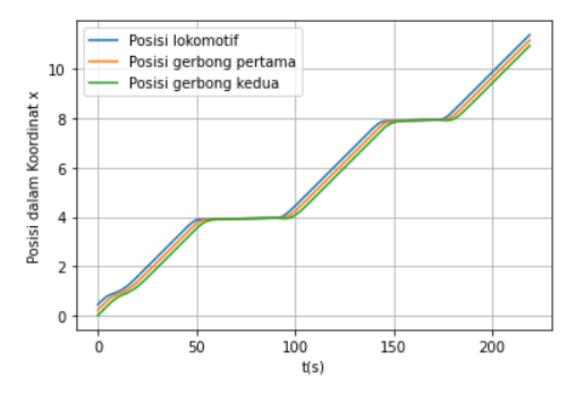
Gambar 10. Grafik perubahan posisi dalam koordinat x terhadap waktu
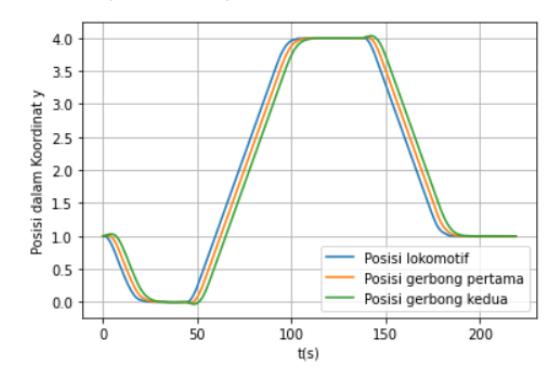
Gambar 11. Grafik perubahan posisi dalam koordinat y terhadap waktu
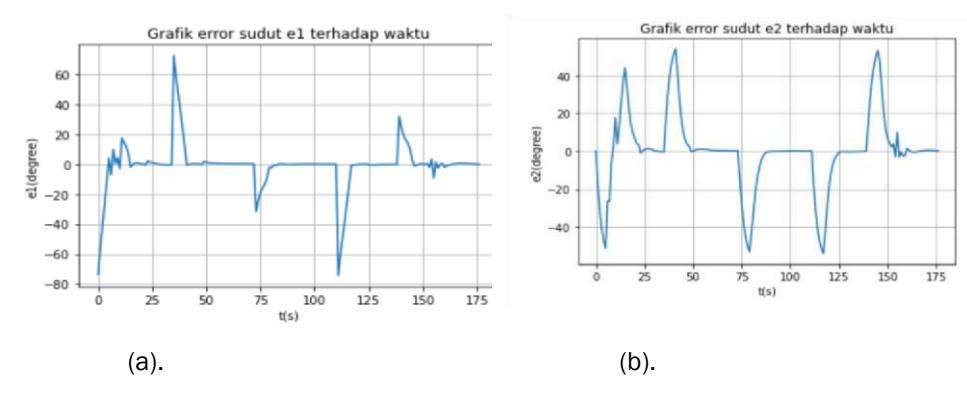
Gambar 12. Grafik sudut (a). error 1 dan (b). error 2 terhadap waktu
Lokomotif, gerbong pertama, dan gerbong kedua masing – masing ditandai dengan lingkaran berwarna ungu, biru, dan kuning. Grafik perubahan posisi dan orientasi untuk lokomotif dan gerbong terhadap waktu terdapat pada gambar 9 hingga gambar 11. Berdasarkan gambar 7 dan 12, implementasi pengontrol fuzzy dan metode LoS menunjukkan bahwa trem dapat mengikuti orientasi dari vektor LoS sehngga trem dapat mengikuti jalur yang sudah ditentukan.
3.2 Simulasi Deteksi Objek
Untuk mengetahui bagaimana performa dari algoritma pendeteksi objek yang digunakan pada pada tahap pelatihannya, maka pada Gambar 13 diperlihatkan grafik total loss yang dihasilkan terhadap jumlah step pelatihan.
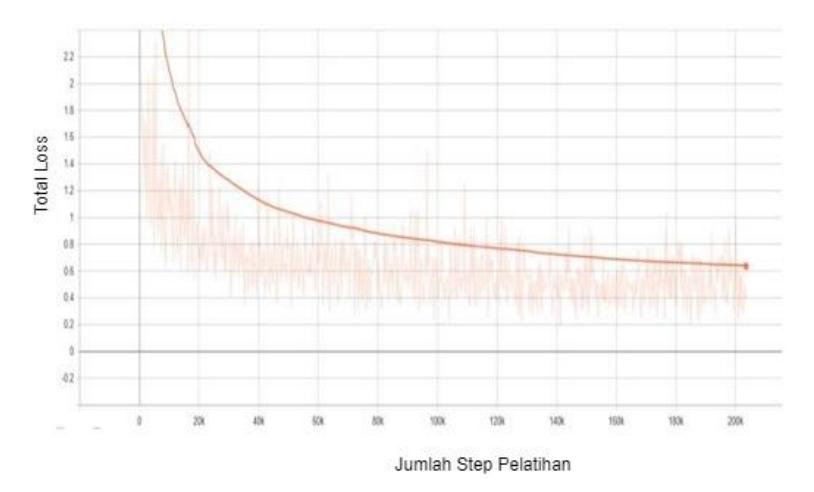
Gambar 13. Grafik total loss terhadap jumlah pelatihan
Setelah tahap pelatihan dilakukan, didapatkan nilai average precission sebesar 0,782 dan total Loss sebesar 0.8672 yang menyatakan bahwa model dapat mendeteksi objek dengan akurat. Selanjutnya, hasil-hasil dari simulasi pendeteksi objek adalah bidang pembatas berwarna dengan label beserta hasil prediksi yang dinyatakan dalam persentasi untuk berbagai objek seperti yang diperlihatkan pada Gambar 14.
(a). Objek berupa Rambu Lalu Lintas (b). Objek berupa Mobil (c). Objek berupa orang
Gambar 14. Hasil-hasil algoritma pendeteksi objek
Berdasarkan gambar 14, model yang sudah dilatih dapat mendeteksi objek dengan akurat yang ditandai dengan label hasil deteksi berupa kelas objek beserta presentase hasil prediksi yang bernilai tinggi.
Setelah model yang dilatih berhasil melakukan pendeteksian objek dengan memuaskan, langkah berikutnya adalah menerapkan konsep penglihatan stereo untuk mengukur jarak antara kamera dengan objek seperti yang diperlihatkan pada Gambar 15. Ketika sebuah objek penghalang berhasil terdeteksi, kotak pembatas objek tersebut akan dibuat dan dilakukan perhitungan koordinat titik tengah kotak tersebut dan titik tengah kamera dalam sumbu x untuk dimasukkan ke dalam persamaan (1) untuk menghitung jarak antara objek peghalang dengan kamera. Dengan menggunakan konsep penglihatan stereo ini maka jarak yang diukur dapat diketahui dengan kesalahan ±1.43%. Dengan mengetahui jarak antara kereta dan objek di depannya maka dapat dilakukan langkah-langkah yang diperlukan seperti misalnya melakukan pengereman atau mencoba menghindar dari objek-objek tersebut.
Gambar 15. Implementasi konsep penglihatan stereo
4 Kesimpulan
Makalah ini berhasil memperlihatkan bagaimana pengontrolan trem tanpa rel dan pendeteksian objek-objek yang berada di depan trem tanpa rel dengan hasil yang cukup memuaskan. Berdasarkan studi simulasi yang dilakukan maka metode pengontrol fuzzy dengan teknik LoS dapat meminimumkan sudut error e1 dan e2 sehingga kereta tanpa rel dapat bergerak mengikuti jalur virtual yang sudah ditetapkan. Selain itu algoritma pendeteksian objek yang dikembangkan mampu mendeteksi objek berupa mobil, orang, truk, dan rambu lalu lintas yang meliputi tanda stop, belok kanan, dan belok kiri dengan average precision sebesar 0.782, serta mengenali objek-objek tersebut dengan persentasi yang cukup baik. Demikian juga konsep penglihatan stereo berhasil menentukan jarak antara kereta dengan objek di depannya dengan ketelitian yang cukup baik.
5 Referensi
- [1] Yuan, X., Huang, R., Zhang, Q., Zhang, X., Zhang, S., & Yunqin, H. (2020). Longitudinal control of Autonomous-rail Rapid Tram in platooning using Model Predictive Control, 2020 IEEE Vehicle Power and Propulsion Conference, Gijon, Spanyol, 26-29 Oct., 2020.
- [2] Li, H., Zhang, Y., Liao, H., Peng, J. Predictive Set Point Modulation Charging of Autonomous Rail Transit Vehicles. Energies. 2020, 13, 4992. https://doi.org/10.3390/en13194992.
- [3] Widyotriatmo, A., Yunazwin, Y., Raka, M., & Putranto, F. (2020). "Forward and backward motions path following controls of a truck-trailer with references on the head-truck and on the trailer. ISA Transactions", 2020. https://doi.org/10.1016/j.isatra.2020.05.046
- [4] Widyotriatmo A., Pranajati, I.G., Muhammad, F.A., and Nazaruddin, Y.Y., "Machine vision object recognition using dual-stage deep learning", The 16th International Conference on Automation Technology (Automation 2019), Taipei, Taiwan, November 22-24, 2019.
- [5] Sun, X., Jiang, Y., Ji, Y., Fu, W., Yan, S., Chen, Q., Yu, B., & Gan, X. (2019). "Distance Measurement System Based on Binocular Stereo Vision". IOP Conference Series: Earth and Environmental Science, 252(5). https://doi.org/10.1088/17551315/252/5/052051
- [6] Y.Y. Nazaruddin, Sistem Kontrol Cerdas, 2020, Program Studi Teknik Fisika, ITB.
- [7] A. Howard dkk, "MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. American Journal of Computing Research Repository", American Journal of Computing Research Repository, pp. 5686-5695, 2017.
- [8] W. Liu dkk, "SSD: Single Shot MultiBox Detector", 14th European Conference on Computer Vision, pp. 21-37, 2016.
- [9] Mrovlje, J., & Vran, D. (2008). Distance measuring based on stereoscopic pictures, 9th International PhD Workshop on Systems and Control: Young Generation Viewpoint, Izola, Slovenia, 1-3 Oct., 2008.
- [10]J. Cheng, Y. Zhang, and Z. Wang, "Path tracking control for mobile robot with two trailers", Proceedings of the 32nd Chinese Control Conference, Xi'an, China, 26-28 July,2013.