
Pendahuluan
Sebagai negara kepulauan terbesar di dunia, Indonesia memiliki potensi kelautan yang melimpah. Oleh karena itu banyak masyarakat yang bergantung pada hasil laut. Salah satu permasalahan yang dihadapi nelayan dalam menggali potensi laut Indonesia adalah bagaimana nelayan memanfaatkan teknologi [1]. Untuk membantu menggali potensi laut Indonesia, nelayan memanfaatkan alat bantu penangkap ikan yang dikenal sebagai rumpon. Rumpon sendiri adalah alat bantu yang menggunakan atraktor dan terletak di tengah lautan untuk membuat ikan berkumpul di sekitar rumpon dan memudahkan nelayan dalam menangkap ikan [2].
Rumpon yang dipakai oleh nelayan umumnya adalah rumpon jenis konvensional. Rumpon konvensional merupakan rumpon yang diberi pemberat sebagai jangkar hingga menyentuh dasar laut yang dalamnya hingga beberapa ratus meter agar rumpon tetap diam dan tidak terbawa arus saat cuaca buruk di tengah laut [3]. Rumpon umumnya dilengkapi dengan pencahayaan yang berguna untuk memikat ikan berkumpul di sekitar rumpon [4]. Berdasarkan wawancara penulis di desa Lopo, Kabupaten Gorontalo, Provinsi Gorontalo. Penerangan yang ada pada rumpon berfungsi juga sebagai penanda agar tidak ditabrak oleh kapal besar yang sedang lewat. Berdasarkan wawancara ini juga penulis mendapatkan bahwa permasalahan yang sangat sering terjadi dalam memanfaatkan rumpon adalah hilangnya komponen kelistrikan pada rumpon seperti baterai, panel surya serta lampu akibat dicuri. Walaupun terkadang rumpon juga bisa hilang akibat cuaca buruk namun permasalahan utama ada pada kasus pencurian komponen kelistrikan.
Sebelumnya sudah ada sebuah prototipe sistem untuk melacak dan mengendalikan lampu berbasis Arduino Uno dan SIM808 sebagai komponen pelacak sekaligus penerima dan pemancar sinyal GSM. Sistem ini juga bisa mengendalikan pencahayaan pada rumpon seperti mati atau nyala lampu rumpon [5]. Namun sistem ini memiliki kelemahan dimana hanya mencakup pelacakan yang datanya melalui SMS yang kurang ekonomis dibandingkan internet [6]. Tidak adanya pemicu mengakibatkan data hanya bisa diminta saat ada perintah manual saja, dengan demikian nelayan harus secara berkala mengecek dan mengeluarkan pulsa untuk memastikan posisi rumpon. Oleh karena itu, penelitian ini bertujuan merancang prototipe yang memiliki pemicu dan mengganti fitur SMS ke internet dengan memanfaatkan teknologi komunikasi Long Range (LoRa). Komunikasi nirkabel LoRa merupakan sebutan untuk modul yang berfungsi sebagai penerima dan pembuat transmisi nirkabel untuk jarak jauh dengan penggunaan daya yang cukup rendah [7]. Jarak jangkauan LoRa dapat menjangkau radius hingga 15 km [8].
Metode
1 Perancangan Perangkat Keras
Dalam perancangan perangkat keras ini seperti terlihat pada Gambar 1, terbagi atas dua unit perangkat yang akan saling berkomunikasi dengan jaringan LoRa satu sama lain. Dua unit ini dimaksudkan agar salah satu unit diletakan di rumpon dan unit lainnya diletakan di rumah penduduk agar bisa terhubung ke jaringan Wi-Fi dan berfungsi sebagai penerus perintah dari Bot Telegram ke unit yang terletak di rumpon melalui sinyal LoRa. Dengan demikian, koneksi akan selalu ada walaupun di laut selama unit ada dalam jarak jangkauan sinyal LoRa.
Seperti terlihat pada Gambar 1, garis merah merupakan penanda bahwa setiap modul terhubung ke catu daya dan kedua unit memiliki catu daya masing-masing. Garis biru merupakan penanda modul terhubung secara digital yang dapat memberikan dan/atau menerima informasi. ESP32 dipilih sebagai mikrokontroler karena spesifikasi yang memiliki inti ganda dan konektivitas wi-fi serta relatif mudah didapatkan karena tersebar luas di pasar indonesia. ESP32 juga merupakan modul yang cocok untuk proyek IoT dengan harga relatif murah [9].
Gambar 1. Diagram blok perangkat keras
2 Perancangan Perangkat Lunak
Perangkat lunak dalam prototipe ini akan dibagi menjadi 2. Perangkat lunak untuk prototipe yang diletakan di atas rumpon tengah laut (unit 1) dan yang terkoneksi ke Wi-Fi yang secara relatif dekat dengan nelayan (unit 2).
Alur proses alat dimulai dari perangkat yang terhubung ke wi-fi (unit 2) mengirimkan perintah melalui LoRa ke unit 1 yang terletak di rumpon seperti terlihat di Gambar 2. Perintah dari unit 2 akan menyesuaikan pengaturan yang dilakukan melalui Bot Telegram. Pesan perintah yang ada pada Bot Telegram kemudian akan diteruskan melalui sinyal LoRa untuk dieksekusi oleh unit 1. Apabila tidak ada pesan dari Bot Telegram maka perintah yang akan dikirimkan adalah perintah sebelumnya.
Saat unit 2 menerima pesan melalui LoRa dari unit 1 maka data yang diterima akan disimpan untuk nantinya dikirimkan saat diminta melalui Bot Telegram. Apabila pesan LoRa yang diterima merupakan alarm peringatan sensor terpicu maka secara otomatis akan mengirimkan peringatan melalui Bot Telegram dan di saat yang bersamaan mengaktifkan bunyi alarm buzzer.
Dalam unit 1 pemanfaatan fungsi inti ganda pada ESP32 dimaksimalkan untuk mengoptimalisasikan kecepatan pengiriman dan penerimaan data seperti terlihat pada Gambar 3. Inti pada ESP32 bernama Core 0 dan Core 1 dengan masing-masing bisa berjalan secara bersamaan tanpa perlu menunggu core lain menyelesaikan perintah sebelumnya. Inti 1 pada ESP32 dalam prototipe 1 ini difungsikan secara khusus hanya untuk penerima dan pengiriman sinyal LoRa sedangkan inti 0 difungsikan untuk menangani semua modul lain yang ada.
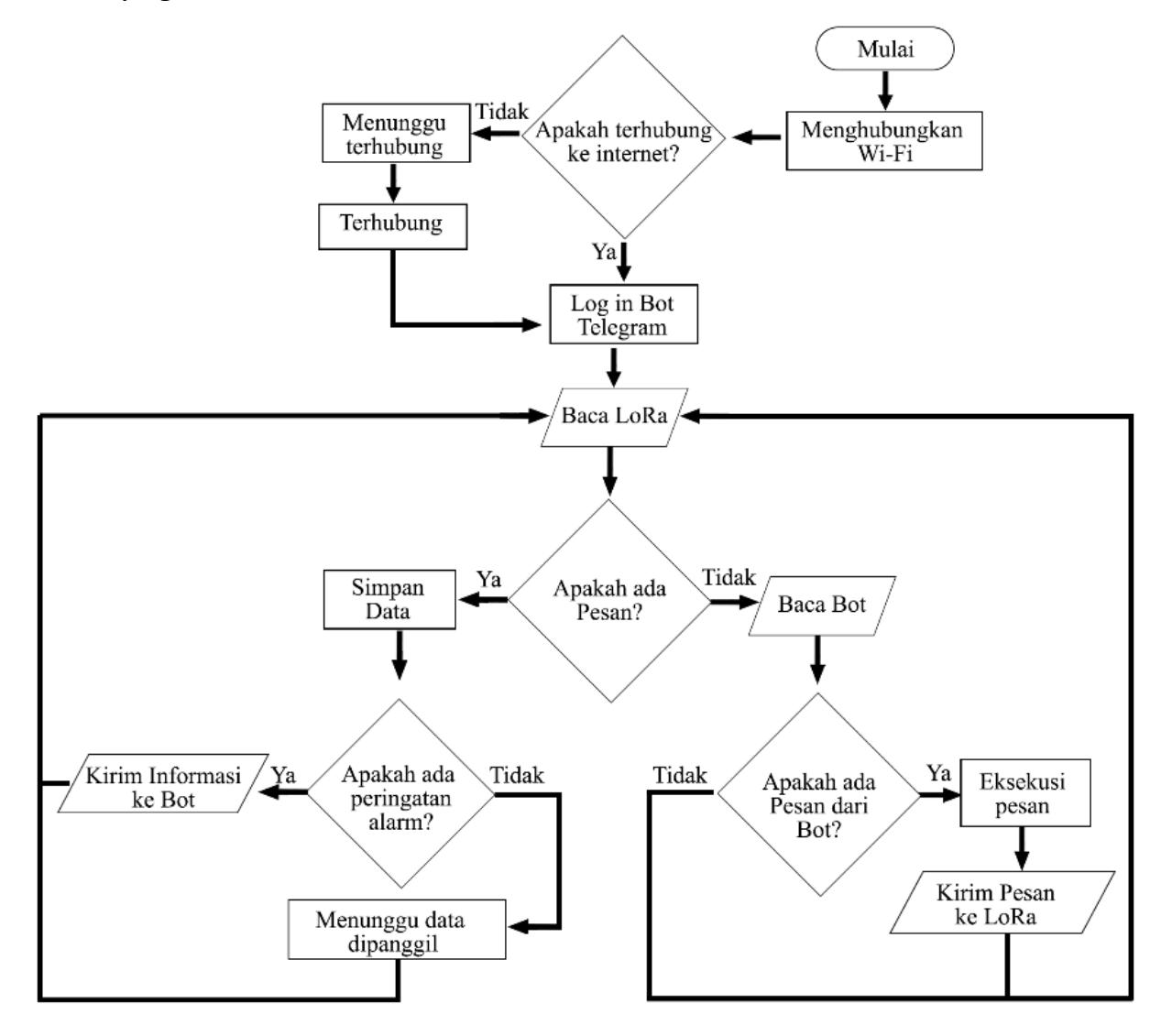
Gambar 2. Diagram alir algoritma perangkat lunak prototipe 2
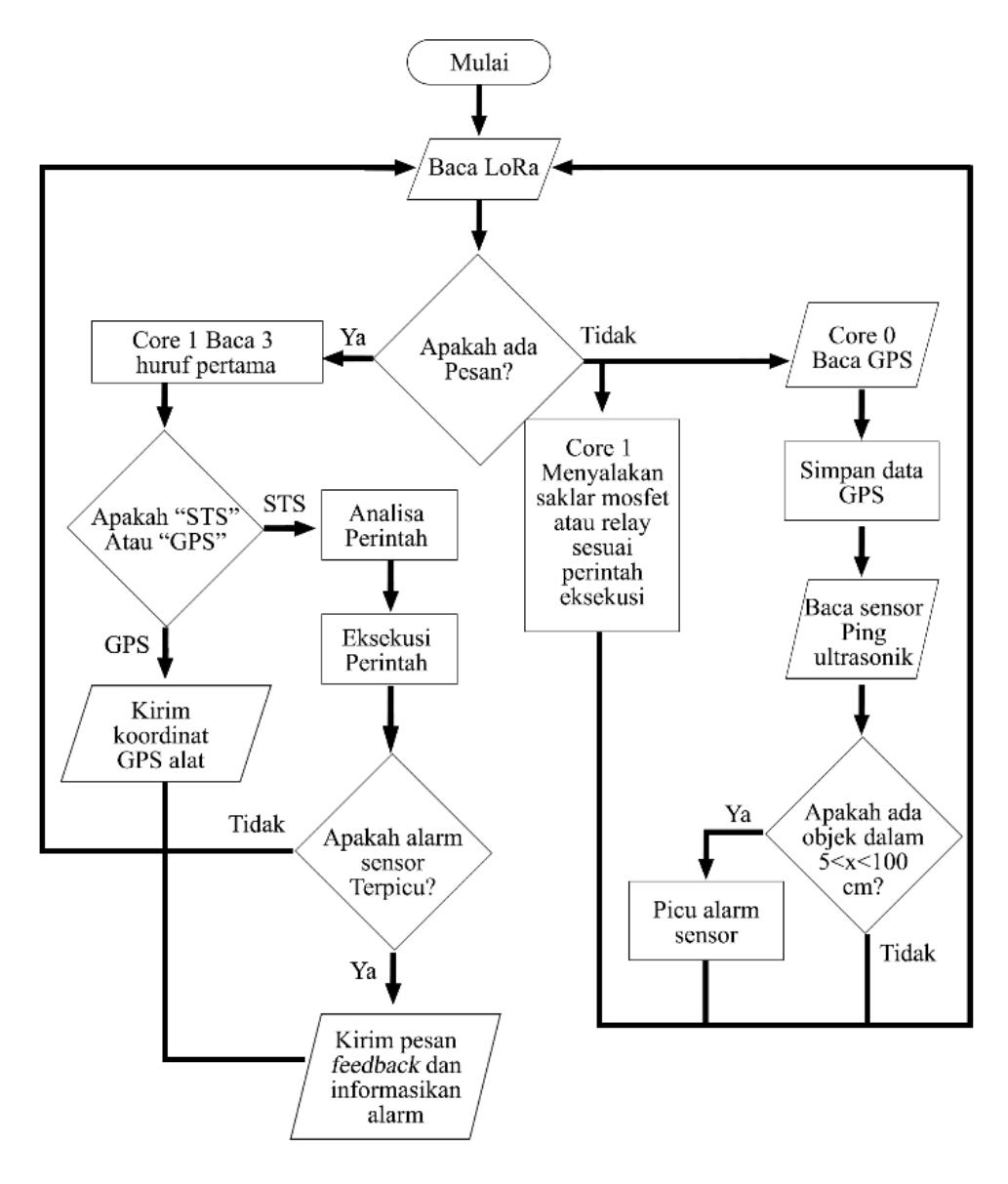
Gambar 3. Diagram alir algoritma perangkat lunak prototipe 1
3 Cara Kerja Pemicu Sensor Ultrasonik
Sensor pemicu akan diletakan sedemikian mungkin sehingga posisinya secara relatif menghadap ke daerah bagian tubuh tengah ke bawah seperti yang tampilkan oleh Gambar 4. Hal ini dilakukan karena pada umumnya tinggi kotak baterai sejajar dengan dada laki-laki dewasa, dengan demikian apabila sensor pemicu diletakan tepat di bawah kotak maka area peka sensor akan berada di daerah tubuh bawah dada. Penentuan jarak pada sensor ultrasonik mengacu pada persamaan gelombang suara [10]:
\[S = \frac{v x t}{2} \tag{1}\]
Dengan S merupakan jarak, v adalah kecepatan suara dan t adalah waktu sejak suara dikeluarkan.
Gambar 4. Ilustrasi posisi sensor pemicu
Dalam upaya meminimalisir adanya kemungkinan salah baca, sensor pemicu dibatasi pembacaannya dalam perancangan ini pada jarak 5>x>100 cm. Jangkauan jarak ini dianggap cukup dalam perancangan prototipe ini dikarenakan panjang rumpon yang relatif pendek. Dikarenakan umumnya posisi komponen kelistrikan kas baterai berada di pangkal rumpon maka prototipe ini hanya akan memiliki 3 port sensor ultrasonik walaupun jumlah sensor bisa disesuaikan menurut kebutuhan luas area peka sensor dan akan diuji 25 kali untuk masing masing port dan dalam pengujian prototipe hanya akan memakai 1 sensor. Sensor ultrasonik akan menganggap apapun yang berada dalam radius bacanya seperti pada Gambar 4, selama 3 detik sebagai target yang akan dibaca dan akan memicu peringatan serta penyengat. Pembacaan dalam kurun waktu 3 detik ini sebagai salah satu upaya untuk mengurangi kemungkinan kesalahan baca pada sensor ultrasonik.
4 Parameter Keberhasilan Prototipe
Parameter untuk menentukan keberhasilan prototipe adalah prototipe berhasil memberikan data lokasi, mengaktifkan penyengat listrik serta peringatan Bot Telegram melalui sensor pemicu dan mengendalikan lampu melalui Bot Telegram. Dalam memberikan data lokasi, prototipe juga diuji akurasi GPS nya untuk memastikan bahwa prototipe memberikan data lokasi yang memadai. Metode yang dipakai dalam mengukur akurasi GPS adalah CEP dan 2DRMS. Kedua metode ini digunakan karena merupakan metode yang paling populer. 2DRMS mengacu pada standar deviasi error dari posisi aslinya dan menghitung akurasinya dengan dikuadratkan dan diakarkan sehingga menghasilkan satu nilai yang mengindikasikan akurasi sebesar 95- 98%. CEP mengacu pada radius lingkaran dengan probabilitas 50% data akan jatuh di radius tersebut [11]. Perhitungan CEP dan 2DRMS dengan persamaan yang diuraikan Specht [12]:
\[CEP = 0.59 * (\sigma_{\varphi} + \sigma_{\Lambda}) \tag{2}\]
\[2DRMS = 2 * \sqrt{(\sigma_{\varphi})^2 + (\sigma_{\Lambda})^2}\] (3)
Dengan σφ merupakan simpangan baku lintang dan σʎ merupakan simpangan baku bujur.
Hasil & Diskusi
Prototipe yang dihasilkan dari perancangan ini dinamakan Rubot32. Rubot32 memiliki semua fitur sistem yang sudah ada dengan sistem sebelumnya selain SMS, yaitu kendali lampu jarak jauh dan juga GPS. Fitur baru dari sistem keamanan ini adalah penyengat listrik tegangan tinggi, terkoneksi ke Bot Telegram via internet yang menutupi kelemahan penggunaan SMS dari alat yang sebelumnya sudah pernah dirancang.
/Lampuoff
/Setrumon
/Setrumoff
1 Desain Fisik Prototipe
Gambar 5. Tampilan fisik Rubot32
Rubot32 memiliki casing terbuat dari plastik yang didesain melalui aplikasi CAD Fusion 360. Desain ini kemudian dicetak dengan printer 3D untuk menghasilkan casing seperti terlihat pada Gambar 5. Rubot32 secara fisik memiliki input power, antena +5 dBi, sensor ultrasonik, lampu indikator, serta layar OLED.
2 Sistem Kendali Lampu, Peringatan dan Penyengat listrik Melalui Telegram
Pengujian eksekusi perintah dilakukan sebanyak 25 kali. Terlihat dari Tabel 2 bahwa semua perintah saklar baik lampu maupun penyengat bisa dieksekusi dengan baik dengan persentase keberhasilan eksekusi perintah sebesar 100%. Pengujian ini menandakan bahwa komunikasi antar unit melalui LoRa berhasil, sehingga perintah dapat dieksekusi. Jarak antar unit untuk menguji jangkauan LoRa paling jauh saat dilakukan pengujian ini adalah 4.9 km dalam kondisi non line of sight (NloS). Penyengat tegangan tinggi yang bekerja berdasarkan prinsip kumparan Tesla [13]. Modul yang digunakan berdasarkan datasheet mampu mengeluarkan tegangan sebesar 800.000 volt maksimum dengan daya sebesar 30 watt secara maksimum. Namun perangkat ini dirancang dengan pembatas daya sebesar maksimal 15 watt, sehingga arus yang dikeluarkan oleh penyengat tidak berada di tingkat yang dapat membahayakan manusia [14].
Perintah Bot<br/>TelegramRespon Bot TelegramKondisiPersentase<br/>Keberhasilan/LampuonMenyalakan LampuLampu Menyala100%
Mematikan Lampu
Menyalakan Penyengat
Tabel 1. Hasil uji perintah saklar
100%
100%
Lampu Mati
Penyengat Menyala
Gambar 6. (a) antarmuka perintah dan (b) hasil uji saklar lampu dan penyengat
Terlihat pada Gambar 6 (b) terdapat lampu indikator alat. Lampu ini berfungsi sebagai penanda bahwa alat berjalan dengan baik. Terdapat pula lampu LED merah untuk indikator saklar. LED merah ini ditambahkan hanya untuk menjadi indikator apabila saklar dalam keadaan menyala/ON dengan terkonfirmasi oleh lampu pengujian yang nyala. Contoh tampilan antarmuka Bot Telegram untuk perintah saklar ada pada Gambar 6 (a).
Gambar 7. (a) Sistem peringatan dan (b) data lokasi
Sistem peringatan sensor ultrasonik berhasil terpicu terlihat pada Gambar 7 (a). Peringatan akan dikirim 3 kali untuk menarik perhatian pemilik dan secara otomatis menyalakan sistem penyengat. Pada Gambar 7 (b) juga terlihat bahwa data GPS berhasil diterima saat perintah permintaan data GPS dikirimkan melalui Bot Telegram.
3 Akurasi GPS
Pengujian dilakukan 3 kali dengan masing-masing mengambil sekurang-kurangnya 5 data setiap lokasi untuk dijadikan data perhitungan akurasi.
| Pengujian | Std. Deviasi E (meter) | Std. Deviasi N (meter) | CEP (meter) | 2DRMS (meter) |
|---|---|---|---|---|
| Indoor | 4.39 | 2.53 | 4.08 | 10.13 |
| Outdoor GORR | 0.47 × 10-6 | 1.91 | 1.13 | 3.82 |
| Outdoor Lopo | 0.93 | 0.68 | 0.95 | 2.29 |
| Rata-rata uji Outdoor | 0.46 | 1.29 | 1.04 | 3.06 |
Tabel 2. Hasil Simpangan baku, radius CEP dan 2DRMS pengujian
Terlihat pada Tabel 1 bahwa nilai pengujian outdoor menampilkan nilai lebih rendah daripada nilai yang ada pada pengujian indoor. Hal ini sesuai dengan penelitian Kjærgaard, dimana Kjærgaard menjelaskan bahwa akurasi GPS sangat dipengaruhi oleh material yang berada dalam jalur sinyal menuju ke penerima sinyal. Hal ini termasuk ketebalan lapisan yang ada [15]. Dan karena sinyal GPS didapatkan dari satelit sehingga lapisan material gedung maupun tinggi gedung sangat berpengaruh. Nilai yang lebih rendah menandakan radius jatuhnya data lokasi yang lebih kecil dari lokasi aslinya, sehingga semakin kecil radius lokasi maka semakin akurat. Hasil ini dianggap cukup memadai dikarenakan gawai dalam suatu penelitian [16] memiliki akurasi 7-13 meter. Dengan asumsi bahwa gawai memiliki akurasi GPS yang memadai untuk dijadikan sebagai petunjuk lokasi, maka berdasarkan hasil ini Rubot32 memiliki GPS yang memadai untuk dijadikan petunjuk lokasi.
Kesimpulan
Prototipe sistem keamanan kas baterai dan kendali lampu pada rumpon dengan kendali telegram berhasil dibuat dengan sensor ultrasonik yang berhasil terpicu apabila berada dalam wilayah baca sensor selama 3 detik. Prototipe ini dinamakan Rubot32 dan prototipe ini berhasil mengirimkan data lokasi GPS melalui internet ke Bot Telegram, mengendalikan saklar baik penyengat listrik maupun sistem pencahayaan berupa lampu dari Bot Telegram dengan 100% keberhasilan dari 25 kali pengujian masing-masing perintah serta berhasil berkomunikasi melalui LoRa yang ditandai dengan dieksekusinya perintah dari Bot Telegram. Rerata akurasi yang diberikan oleh GPS Rubot32 berada di radius 1.29 meter untuk CEP dan 3.06 meter untuk 2DRMS dalam kondisi outdoor yang memberikan nilai akurasi terbaik dan dianggap memadai.