
Pendahuluan
Angin merupakan pergerakan massa udara atmosferik akibat gaya gradien tekanan dari area bertekanan udara tinggi menuju area bertekanan udara rendah [1]. Parameter angin permukaan memiliki besaran kecepatan dan arah dalam vektor dua dimensi. Sensor kecepatan angin diinstal pada tiang di ketinggian 10 meter dari permukaan tanah [2]. Jaringan anemometer sering mengalami kendala berupa kegagalan sistem termasuk kerusakan sensor [3]. Penggantian sensor membutuhkan ketersediaan suku cadang serta durasi yang signifikan. Hal ini menyebabkan adanya gap data pada jeda waktu antara pelepasan dan pemasangan sensor. Selain itu, tindakan korektif belum dilakukan secara langsung, sebab verifikasi peralatan melalui kalibrasi lapang dilakukan dalam periode berkala [4]. Keterbatasan jumlah radar cuaca juga menjadi kendala dalam menyediakan backup data sensor kecepatan angin.
Li dan Shen berusaha mengembangkan model estimasi kecepatan angin multisite menggunakan digital twin berbasis Convolutional Neural Network (CNN) dan Bidirectional Long Short Term Memory (BiDLSTM). Jumlah anemometer fisik yang diteliti sebanyak 4 sensor. Jarak rata-rata antar sensor yaitu 5–8 km. Dataset kecepatan angin berdurasi 19 hari dengan interval pengukuran per 10 menit [5]. Namun demikian, penelitian Li dan Shen memiliki beberapa peluang pengembangan. Penelitian tersebut belum mempertimbangkan kemungkinan adanya outlier pada pra-pemrosesan dataset pemodelan. Pemilihan kelompok sensor Li dan Shen (2022) sebagai input pemodelan hanya berdasarkan lajur arah angin dominan di site. Input pemodelan estimasi sensor kecepatan angin sebaiknya dipilih berdasarkan analisis arah angin dominan dan koefisien korelasi antar sensor. Hal ini dapat menunjang akurasi model serta mengurangi beban komputasi machine learning. Desain estimator Li dan Shen (2022) juga masih berpotensi dikembangkan menggunakan algoritma selain CNN dan bidirectional LSTM.
Bai dkk. (2018) memodifikasi arsitektur CNN dan Recurrent Neural Network (RNN) menjadi Temporal Convolutional Network (TCN). Algoritma TCN memiliki kelebihan dalam memproses sinyal domain waktu secara paralel, sehingga mempersingkat proses training LSTM yang memproses sinyal waktu secara sekuensial [6]. Berdasarkan literatur, performa akurasi TCN lebih tinggi dibanding RNN dan LSTM untuk beberapa dataset sinyal domain waktu dengan durasi komputasi yang lebih singkat [7].
Algoritma TCN berpotensi diimplementasikan dalam model estimasi kecepatan angin pada jaringan anemometer. Berdasarkan penelitian-penelitian yang telah diuraikan, penulis mengusulkan estimasi kecepatan angin pada jaringan anemometer berbasis algoritma TCN menggunakan framework cooperative sensing. Prapemrosesan dataset meliputi deteksi outlier, imputasi missing data serta seleksi input dilakukan sebelum model estimasi berbasis TCN didesain. Estimasi ini diharapkan menjadi backup ketika sensor rusak atau ketika dilakukan pemeliharaan.
Metode
Dataset kecepatan angin per menit diperoleh dari anemometer ultrasonik merk MicroStep. Lokasi anemometer meliputi SB3, SB4, SB5 dan SB6. Dataset ini merupakan data periode 1 Januari 2022 – 24 Desember 2023.
Gambar 1. Lokasi sebaran sensor kecepatan angin
Gambar 1 menunjukkan peta lokasi anemometer pada area penelitian. Sensor kecepatan angin fisik yang digunakan sebagai pemodelan terletak di Bandara Internasional Juanda Surabaya. Tabel 1 menunjukkan titik koordinat lintang bujur dan elevasi anemometer.
Tabel 1. Koordinat dan elevasi anemometer
| Lokasi Sensor | Lintang | Bujur | Elevasi (meter) |
|---|---|---|---|
| SB3 | -7022'39" | 112048'5" | 1 |
| SB4 | -7022'29" | 112046'55" | 4 |
| SB5 | -7022'24" | 112045'49" | 2 |
| SB6 | -7021'57" | 112044'34" | 2 |
Tabel 1 menunjukkan elevasi sensor kecepatan angin berada di sepanjang sisi utara landasan udara Bandara Juanda. Rentang jarak horizontal antar keempat sensor yaitu 2–2,5 km. Sensor terintegrasi dalam sistem peringatan dini wind shear (Low Level Wind Shear Alert System) di sepanjang landasan pesawat. Wind shear merupakan peristiwa pergeseran kecepatan atau arah angin secara signifikan di permukaan [8]. Penerapan estimasi berbasis TCN mampu mengakomodasi resolusi temporal yang tinggi sebagaimana output data wind shear yaitu data kecepatan angin per menit. Anemometer terletak di Kota Surabaya yang memiliki tipe zona musim (ZOM) monsunal [9]. Tipe ZOM ini mengindikasikan adanya angin baratan dan timuran yang mendominasi sepanjang tahun di landasan udara Bandara Juanda. Penelitian ini terdiri dari beberapa tahapan. Gambar 2 menunjukkan diagram alir penelitian secara keseluruhan.
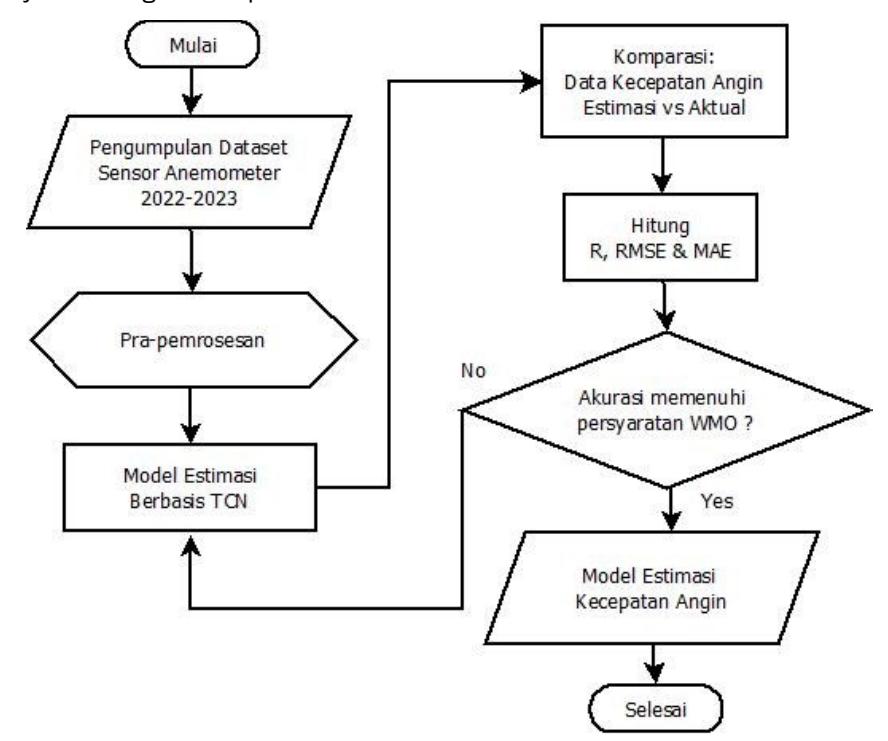
Gambar 2. Diagram alir penelitian
1 Pra-pemrosesan Dataset
Pra-pemrosesan dataset meliputi deteksi serta penghapusan outlier dan imputasi terhadap missing data pada dataset. Outlier dihapus melalui prosedur delesi. Delesi adalah proses menghapus seluruh data outlier [10]. Apabila data normal memiliki missing data, maka dilakukan imputasi terhadap dataset [11]. Imputasi missing data jangka pendek menggunakan Multivariate Imputation by Chained Equation [12]. MICE menghasilkan beberapa nilai imputasi terhadap satu titik missing data kecepatan angin melalui proses iterasi.
2 Perancangan Model Estimasi Kecepatan Angin
Perancangan model estimasi berbasis TCN terdiri atas tahap seleksi input, transformasi data, segmentasi data, desain hyperparameter, dan pelatihan model. Seleksi input bertujuan memilih input terefektif untuk desain model estimasi [13]. Penelitian ini menggunakan metode arah angin dominan untuk menentukan baseline input estimasi. Berdasarkan analisis terhadap diagram wind rose, arah angin dominan yang terjadi di Bandara Juanda Surabaya meliputi:
- a. Arah angin baratan, yaitu angin yang bergerak dari arah baratan (barat laut, barat, barat daya) menuju timuran (tenggara, timur, timur laut). Nilai arah angin berkisar 2250 – 3150.
- b. Arah angin timuran, yaitu angin yang bergerak dari arah timuran (tenggara, timur, timur laut) menuju baratan (barat laut, barat, barat daya). Nilai arah angin berkisar 450 – 1350.
- c. Arah angin peralihan, yaitu arah angin yang bergerak dari utara ke selatan atau dari selatan menuju utara. Nilai arah angin berada di luar rentang angin timuran dan baratan.
Dataset dibagi menjadi 3 yaitu dataset estimasi angin timuran, baratan dan peralihan. Pembagian menyesuaikan arah angin yang terjadi pada anemometer terdekat terhadap target. Gambar 3 menunjukkan contoh ilustrasi skenario penentuan baseline input menurut metode arah angin dominan.
Gambar 3. Skenario penentuan baseline input arah angin timuran
Jika anemometer SB5 menjadi target estimasi dan arah angin berasal dari timuran, maka anemometer SB3 dan/atau SB4 menjadi input estimasi. Sebaliknya, jika arah angin berasal dari baratan, maka anemometer SB6 menjadi input estimasi. Apabila terjadi angin peralihan, maka anemometer SB4 dan/atau SB6 menjadi input estimasi. Metode arah angin dominan menghasilkan beberapa skenario baseline input sebagaimana ditunjukkan pada Tabel 2.
Tabel 2. Prediktor dan prediktan model estimasi kecepatan angin
| Target | Model | Skenario Baseline Input Cooperative Sensing |
| SB4 | SB5 | |
| Baratan | SB5 dan SB6 | |
| SB3 | ||
| Peralihan | SB5 | |
| SB3 dan SB5 | ||
| Timuran | SB3 | |
| SB5 | Baratan | SB6 |
| SB4 | ||
| Peralihan | SB6 | |
| SB4 dan SB6 | ||
| SB4 | ||
| Timuran | SB3 dan SB4 |
Data input dan output kemudian ditransformasi. Transformasi data berfungsi menyederhanakan proses komputasi pembelajaran. Setiap elemen nilai input dan output (Zi) dikurangi terhadap nilai minimumnya, kemudian dibagi terhadap rentang datanya, sehingga diperoleh variabel baru hasil transformasi. Selanjutnya, data input dan output dibagi menjadi 75% data training dan 25% data uji. Data latih meliputi dataset anemometer bulan Januari 2022 – Juni 2023. Data uji meliputi dataset anemometer bulan Juli – Desember
2023. Pembagian ini memperhatikan kejadian angin timuran, baratan dan peralihan yang terjadi dalam 1 tahun. Persentase data latih sudah melingkupi periode kejadian angin tersebut.
Temporal Convolutional Network (TCN) menggunakan tiga teknik: konvolusi kausal, konvolusi dilatasi dan koneksi residual [14]. Konvolusi kausal merupakan operasi konvolusi ketika output pada waktu t dihasilkan dari elemen pada waktu t hingga t-x di layer sebelumnya [15]. Konvolusi dilatasi berupaya memperpanjang area ekstraksi data input historis melalui perluasan medan rangsang pada hidden layer [6]. Teknik ini dilakukan dengan memberi jarak antar target konvolusi input per layer secara eksponensial [16]. Operasi konvolusi dilatasi F terhadap elemen s secara matematis dinyatakan sebagai berikut [17]:
\[F(s) = \sum_{i=0}^{k-1} f(i) . x_{s-d.i}\] (1)
Nilai d menyatakan faktor dilatasi dan f(i) merupakan fungsi filter kernel konvolusi. Sementara itu, koneksi residual diadaptasi dari arsitektur ResNet [18]. Arsitektur ini bertujuan mengatasi masalah hilangnya gradien pada deep networks. Selanjutnya, teknik koneksi residual diimplementasikan dengan menambahkan input secara langsung ke output TCN melalui koneksi pintas (by pass). Hyperparameter TCN meliputi panjang filter, panjang kernel filter dan faktor dilatasi untuk setiap estimasi sensor kecepatan angin [16]. Gambar 4 menunjukkan arsitektur TCN.
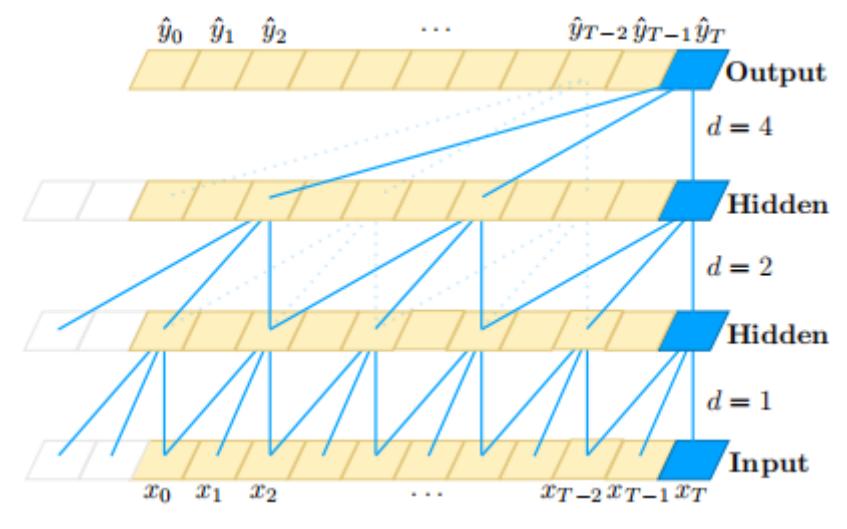
Gambar 4. Arsitektur TCN
3 Pengujian Performa Akurasi Estimasi
Performa akurasi model estimasi TCN terhadap nilai kecepatan angin aktual diukur menggunakan tiga parameter yaitu koefisien korelasi, root mean square error (RMSE) dan mean absolute error (MAE) [19]. Koefisien korelasi menyatakan seberapa erat hubungan antara nilai model terhadap data aktual dalam skala 0–1 [20]. RMSE dan MAE menyatakan nilai error dalam satuan besaran kecepatan angin. Parameter ini paling banyak digunakan sebagai kriteria performa akurasi model [19]. Kedua parameter ini menyesuaikan kriteria performa pengukuran kecepatan angin yang dipersyaratkan oleh dokumen World Meteorological Organization (WMO), yaitu RMSE maksimum 5 m/s dan MAE 3 m/s [21].
Hasil dan Diskusi
Pengumpulan dataset sensor kecepatan angin diperoleh melalui Stasiun Meteorologi Juanda Surabaya. Data sensor diperoleh dalam interval per menit selama periode 1 Januari 2022 – 24 Desember 2023.
1 Hasil Pra-pemrosesan Dataset
Persentase ketersediaan data kecepatan angin SB3, SB4, SB5 dan SB6 berturut-turut yaitu 98,26%; 98,57%; 98,68% dan 98,38% terhadap total ideal 1.041.1120 data. Ketersediaan data keempat lokasi sensor cukup baik yaitu >80%. Prosedur range check mendeteksi data di luar rentang normal pengukuran kecepatan angin
yaitu melebihi 40 m/s. Prosedur step check mendeteksi outlier ketika terdapat perubahan data melebihi 30 m/s dalam interval 1 menit [22]. Hasil kedua prosedur tersebut menunjukkan data anemometer tidak memiliki outlier. Berikutnya, imputasi dilakukan terhadap dataset menggunakan algoritma MICE untuk mengisi data kosong dalam jangka waktu pendek.
Sebelum mendesain model estimasi berbasis TCN, kandidat-kandidat input dipilih berdasarkan arah angin dominan di setiap lokasi. Berdasarkan analisis terhadap wind rose bulanan di Bandara Juanda Surabaya, arah angin dominan dibagi menjadi timuran (450–1350), baratan (2250–3150) dan peralihan. Rentang arah angin peralihan merupakan nilai selain rentang timuran dan baratan. Tabel 3 menunjukkan arah angin dominan bulanan di Bandara Juanda Surabaya.
Bulan Arah Angin Dominan SB3 SB4 SB5 SB6 Januari–April Baratan Baratan Baratan Baratan Mei–Juli dan Desember Peralihan Peralihan Peralihan Peralihan Agustus–November Timuran Timuran Timuran Timuran
Tabel 3. Arah angin dominan bulanan
Tabel 2 menunjukkan anemometer SB3, SB4, SB5 dan SB6 memiliki korelasi arah angin dominan yang identik karena terletak berdampingan di sepanjang garis lurus di sekitar landasan udara. Berdasarkan Tabel 2, model estimasi TCN dibagi menjadi model timuran, baratan, peralihan dan semua arah. Target output model estimasi yaitu anemometer SB5. Sementara itu, anemometer SB3, SB4 dan SB6 menjadi kandidat input TCN. Pembagian model estimasi TCN untuk kecepatan angin diuraikan sebagai berikut:
- i. Model timuran yaitu estimasi sensor SB5 ketika sensor SB3 atau SB4 memiliki data arah angin 450–1350. Data input model estimasi yaitu sensor SB4 yang terletak di sebelah timur target sensor SB5.
- ii. Model baratan yaitu estimasi sensor SB5 ketika sensor SB6 memiliki data arah angin 2250–3150. Data input model estimasi yaitu sensor SB6 yang terletak di sebelah barat target sensor SB5.
- iii. Model peralihan yaitu estimasi sensor SB5 ketika sensor SB4 atau SB6 memiliki data arah angin 3150 3600; 00 - 450 atau 450 - 2250. Data input model estimasi yaitu sensor SB4 dan SB6 yang terletak mengapit posisi target sensor SB5.
- iv. Model semua arah yaitu estimasi sensor SB5 berdasarkan riwayat data historis sensor SB5 itu sendiri. Model ini didesain sebagai backup ketika sensor SB3, SB5 dan SB6 juga mengalami kondisi off. Data input model meliputi data kecepatan angin SB5 1 menit hingga 5 menit sebelumnya. Interval ini memiliki autokorelasi sangat kuat terhadap data SB5 yaitu >0,8 sehingga dipilih sebagai input.
2 Hasil Desain Hyperparameter TCN
Desain hyperparameter TCN menggunakan panjang filter 32, panjang kernel filter k=3 dan faktor dilatasi d=[1,2,4] untuk setiap model estimasi sensor kecepatan angin SB5. Hyperparameter ini merupakan desain paling sederhana yang pernah diterapkan untuk parameter meteorologis lainnya [7]. Pertimbangan pemilihan hyperparameter panjang filter juga disesuaikan terhadap autokorelasi masing-masing sensor. Nilai rata-rata autokorelasi SB3, SB4, SB5 dan SB6 pada lag 30 data sebelumnya yaitu 0,70 sehingga tergolong autokorelasi kuat [20]. Nilai panjang filter merupakan basis bilangan 2 pangkat terdekat terhadap nilai lag tersebut yaitu 25 = 32, sesuai basis nilai faktor dilatasi. Hal ini bertujuan mempermudah proses komputasi TCN. Nilai faktor dilatasi d = [1,2,4] dipilih sesuai desain algoritma TCN paling sederhana guna membatasi waktu komputasi, sebab nilai estimasi harus dihasilkan kurang dari 1 menit sesuai interval data kecepatan angin anemometer.
3 Hasil Pengujian Model Estimasi TCN
Setiap model estimasi TCN dilatih menggunakan 75% total dataset. Sebanyak 25% dari total data keseluruhan diuji melalui hasil estimasi TCN kemudian dikomparasi terhadap data kecepatan angin SB5 aktual. Tabel 4 menunjukkan performa akurasi model estimasi kecepatan angin anemometer menggunakan algoritma TCN.
| Tabel 4. Performa akurasi model estimasi TCN |
|---|
| Target Output | Model Estimasi TCN | Performa Akurasi TCN | |||
|---|---|---|---|---|---|
| Input | R | RMSE (m/s) | MAE (m/s) | ||
| SB5 | Timuran | SB4 | 0,70 | 1,37 | 1,06 |
| Peralihan | SB4 dan SB6 | 0,77 | 1,02 | 0,75 | |
| Baratan | SB6 | 0,54 | 0,93 | 0,77 | |
| Semua arah | SB5 (t-1,, t-5) | 0,87 | 0,91 | 0,65 | |
Berdasarkan Tabel 4, model estimasi kecepatan angin timuran peralihan dan semua arah memiliki korelasi kuat terhadap data aktual dengan nilai koefisien korelasi ≥0,7. Sementara itu, model estimasi kecepatan angin baratan berkorelasi moderat dengan koefisien korelasi dalam rentang 0,4–0,7. Korelasi kecepatan angin sensor SB5 terhadap SB6 yaitu 0,53. Nilai ini lebih rendah dibanding korelasi kecepatan angin sensor SB5 terhadap SB4 yaitu 0,74. Oleh sebab itu, model timuran memiliki korelasi yang lebih tinggi dibanding model baratan. Nilai koefisien korelasi tertinggi dicapai oleh model semua arah. Hal ini membuktikan bahwa data kecepatan angin terkini sangat dipengaruhi oleh nilai kecepatan angin pada interval waktu sebelumnya. Secara keseluruhan, performa akurasi model estimasi berbasis TCN sudah memenuhi persyaratan WMO untuk pengukuran kecepatan angin yaitu capaian RMSE<5 m/s dan MAE<3 m/s.
4 Komparasi Estimasi TCN terhadap CNN-BiDLSTM
Model estimasi TCN kemudian dikomparasi terhadap model estimasi CNN-BiDLSTM yang didesain oleh penelitian Li dan Shen tahun 2022. Struktur serta hyperparameter CNN-BiDLSTM diadaptasi dari penelitian tersebut [5]. Berikutnya, model estimasi kecepatan angin diuji menggunakan algoritma TCN dan CNN-BiDLSTM menggunakan input yang sama yaitu data lag SB5.
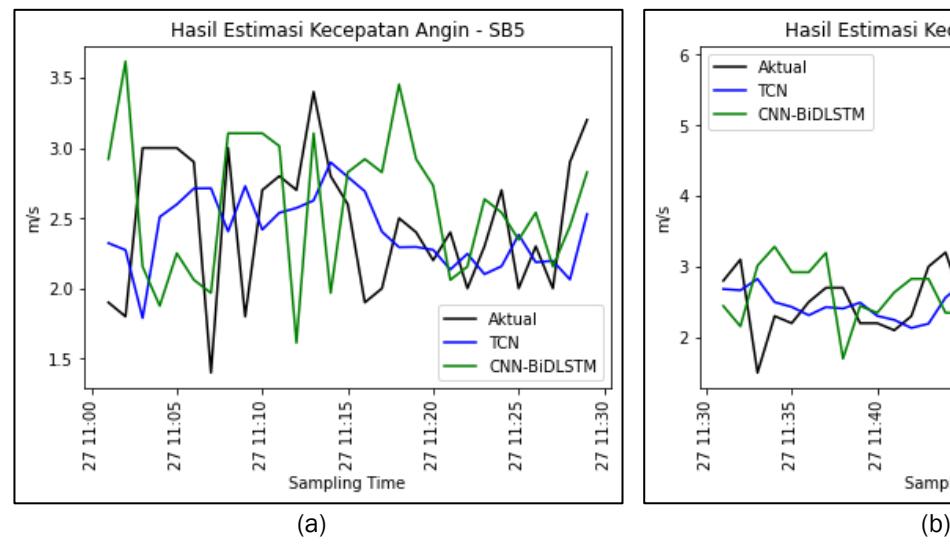
Gambar 5. Lokasi Perbandingan plot estimasi kecepatan angin oleh TCN dan CNN-BiDLSTM
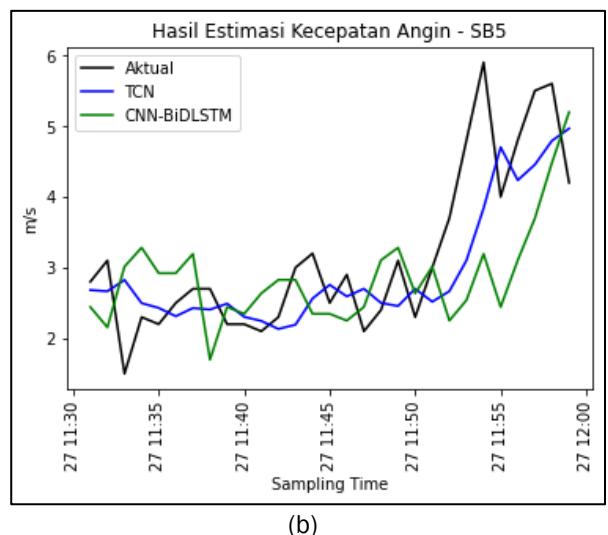
Gambar 5 menunjukkan perbandingan plot estimasi kecepatan angin berbasis TCN dan CNN-BiDLSTM terhadap data kecepatan angin SB5 aktual. Gambar 5(a) dan 5(b) menunjukkan plot estimasi kecepatan angin SB5 pada tanggal 27 Juni 2023. Gambar 5(a) merupakan plot estimasi kecepatan angin pada pukul 11.00 – 11.30 UTC. Plot estimasi TCN lebih mampu mendekati fluktuasi kecepatan angin aktual dibanding plot estimasi CNN-BiDLSTM. Sementara itu, Gambar 5(b) merupakan plot estimasi kecepatan angin pada pukul 11.30 – 12.00 UTC. Plot ini menunjukkan kenaikan kecepatan angin secara signifikan.
Estimasi TCN mampu mengikuti fluktuasi kenaikan data aktual secara lebih cepat dibanding estimasi CNN-BiDLSTM. Pada kedua plot, CNN-BiDLSTM mengindikasikan adanya keterlambatan pola estimasi terhadap data kecepatan angin aktual. Sementara itu, kemampuan TCN dalam mengekstraksi fitur temporal sinyal secara efisien terlihat pada Gambar 5(a) dan 5(b). Kemampuan ini dibuktikan melalui perbandingan performa akurasi TCN dan CNN-BiDLSTM. Tabel 5 menyatakan perbandingan akurasi estimasi CNN-BiDLSTM terhadap TCN.
Tabel 5. Performa akurasi CNN-BiDLSTM vs TCN
| Algoritma | Performa Akurasi | Durasi Komputasi | ||||
|---|---|---|---|---|---|---|
| Estimasi | R | RMSE (m/s) | MAE (m/s) | Pelatihan per Epoch (s) | Pengujian Estimasi (s) | |
| CNN-BiDLSTM | 0,77 | 1,16 | 0,85 | 2206 | 548 | |
| TCN | 0,87 | 0.91 | 0,65 | 87 | 37 | |
CNN-BiDLSTM memiliki koefisien korelasi lebih rendah dibanding TCN. RMSE dan MAE algoritma CNN-BiDLSTM lebih tinggi dibanding TCN. Hal ini membuktikan akurasi TCN lebih baik dibanding CNN-BiDLSTM. Apabila ditinjau dari durasi komputasi pada Tabel 5, TCN mampu memproses pelatihan dan estimasi secara lebih cepat dibanding CNN-BiDLSTM. Komputasi berbasis recurrent neural network seperti BiDLSTM memproses input secara sekuensial, sementara konvolusi temporal TCN memproses input secara paralel, sehingga mempersingkat durasi komputasi.
Berdasarkan keseluruhan pengujian, algoritma TCN memiliki performa yang lebih baik dibanding CNN-BiDLSTM dalam mengestimasi kecepatan angin anemometer, baik segi akurasi maupun efisiensi komputasi. Bagaimanapun, kedua metode masih mampu menghasilkan estimasi yang memenuhi kriteria WMO dalam pengukuran kecepatan angin permukaan.
Kesimpulan
Model estimasi berbasis TCN didesain berdasarkan arah angin dominan di Bandara Juanda Surabaya. Model estimasi TCN dibagi menjadi model timuran, baratan, peralihan dan semua arah. Model estimasi kecepatan angin timuran, peralihan dan semua arah memiliki korelasi kuat terhadap data aktual dengan nilai koefisien korelasi berturut-turut yaitu 0,70; 0,77 dan 0,87. RMSE model timuran, peralihan, baratan dan semua arah berturut-turut yaitu 1,37 m/s, 1,02 m/s, 0,93 m/s dan 0,91 m/s. MAE model timuran, peralihan, baratan dan semua arah berturut-turut yaitu 1,06 m/s, 0,75 m/s, 0,77 m/s dan 0,65 m/s. Secara keseluruhan, performa akurasi model estimasi berbasis TCN sudah memenuhi persyaratan WMO untuk pengukuran kecepatan angin yaitu capaian RMSE<5 m/s dan MAE<3 m/s. Ditinjau dari durasi komputasi, TCN mampu memproses pelatihan 87 detik per epoch dan estimasi 37 detik. Sementara itu, CNN-BiDLSTM memerlukan durasi pelatihan 2206 detik per epoch dan estimasi 548 detik. Berdasarkan keseluruhan pengujian, algoritma TCN memiliki performa yang lebih baik dibanding CNN-BiDLSTM dalam mengestimasi kecepatan angin anemometer, baik segi akurasi maupun efisiensi komputasi. Estimasi ini diharapkan menjadi backup ketika sensor rusak atau ketika dilakukan pemeliharaan. Metode estimasi berdasarkan arah angin dominan memiliki keterbatasan terkait konfigurasi posisi anemometer. Adanya kemungkinan jumlah prediktor berkurang apabila arah angin dominan berasal dari tepi konfigurasi yang berada di dekat ujung landasan. Perlu kajian lebih lanjut terkait pemanfaatan data arah angin sebagai input model estimasi berbasis TCN.