
1. Pendahuluan
Manusia dalam kehidupan sehari-harinya perlu melakukan berbagai aktivitas untuk memenuhi kebutuhan hidupnya. Beberapa aktivitas tersebut seringkali melibatkan penggunaan pergelangan tangan, seperti menulis, memasak dan bahkan untuk berkomunikasi bagi sebagian orang [1],[2]. Aktivitas pada pergelangan tangan tersebut sebenarnya terdiri dari berbagai gerakan dasar seperti fleksi dan ekstensi seperti ditunjukkan pada Gambar 1 [3]. Ketika fungsi pergelangan tangan terganggu, hal ini dapat berdampak signifikan terhadap kemampuan seseorang untuk melakukan aktivitas sehari-hari. Sebagai contoh pada kasus drop hand atau radial nerve palsy serta kasus strok yang menyebabkan seseorang kesulitan untuk mengangkat pergelangan tangannya [1],[4]. Oleh karena itu, banyak teknologi yang dikembangkan untuk membantu mengatasi gangguan pergelangan tangan tersebut sehingga meningkatkan kualitas hidup para penderita, seperti
prostetik [5]-[9], alat rehabilitasi robotik [10] dan lainnya. Inovasi yang mampu menunjang sistem-sistem tersebut salah satunya adalah keberadaan muscle computer interface (MCI) atau antarmuka otot-komputer. Antarmuka otot-komputer ini memungkinkan kontrol dengan memanfaatkan sinyal otot pengguna yang dikenal dengan elektromiografi (EMG) [5]-[10].
Gambar 1. Gerak fleksi dan ekstensi pada pergelangan tangan.
Sinyal EMG merupakan sinyal listrik yang dihasilkan oleh aktivitas otot [11]. Sinyal ini dapat direkam dengan menggunakan elektrode yang ditempel pada permukaan kulit maupun elektrode jarum yang ditusukkan menuju otot terkait. Penggunaan elektrode tempel atau disebut sebagai surface electromyography (sEMG) lebih populer digunakan karena sifatnya yang noninvasif, sederhana dan mudah diimplementasikan [12], [13]. Oleh karena itu, antarmuka otot-komputer dengan menggunakan sEMG menawarkan potensi yang besar untuk dikembangkan. Hal ini didukung dengan adanya keberagaman aplikasi dan konfigurasi perangkat keras [12] yang membuat sEMG berpotensi untuk dikembangkan sebagai basis untuk deteksi gerakan pergelangan tangan, seperti yang telah dilakukan oleh Parajuli (2019) [9], Triwiyanto, dkk (2022) [7] dan Singh (2023) [14].
Deteksi gerakan pergelangan tangan berbasis sinyal sEMG sendiri cukup sulit dilakukan akibat sinyal EMG yang kompleks. Oleh karena itu, pemilihan fitur dan algoritma klasifikasi yang cocok untuk menerjemahkan sinyal sEMG menjadi suatu perintah menjadi tahapan yang sangat penting [16]. Pemilihan fitur dilakukan dengan mempertimbangkan berbagai aspek sinyal sEMG seperti amplitudo, frekuensi dan pola temporal untuk mendapatkan representasi yang paling informatif dan andal dari aktivitas otot, serta kemampuan komputasi dari sistem yang dikembangkan [17]. Salah satu fitur yang populer digunakan dalam analisis sEMG adalah root mean square (RMS) karena kesederhanaannya dan kemampuannya dalam menangkap informasi penting tentang aktivitas dari otot [18]. Proses kalkulasi dalam domain waktu tanpa menggunakan transformasi matematis menjadikan RMS sebagai fitur yang cepat dan ringan secara komputasi [20]. Fitur RMS dari sEMG nantinya perlu diklasifikasikan menjadi kelas yang telah ditentukan. Salah satu algoritma klasifikasi yang dapat digunakan untuk deteksi gerakan pergelangan tangan adalah support vector machine (SVM) yang telah dilakukan oleh Basak (2021) [21], Narayan (2021) [22] dan Aviles (2022) [23]. Metode SVM ini digunakan karena memiliki beberapa keunggulan seperti efektif dalam berbagai situasi, seperti ketika bekerja dengan data berdimensi tinggi dan jumlah sampel yang relatif sedikit [24].
Pada penelitian ini, dilakukan pengembangan suatu sistem untuk klasifikasi sinyal sEMG, khususnya untuk deteksi gerak pada pergelangan tangan sebagai bagian dari pengembangan perangkat antarmuka untuk keperluan perangkat rehabilitasi. Fitur utama dari sEMG yang digunakan dalam sistem ini adalah RMS dan klasifikasi dilakukan dengan menggunakan SVM untuk mengatasi masalah keterbatasan data yang tersedia. Sistem klasifikasi dibentuk untuk dapat mendeteksi tiga posisi pada pergelangan tangan, yaitu fleksi, ekstensi dan normal.
2. Metodologi
Agar sistem bisa beroperasi dengan baik, maka dirancang suatu sistem antarmuka yang terdiri dari beberapa bagian utama, yaitu proses akuisisi sinyal, pemrosesan sinyal dan sistem klasifikasi, seperti ditunjukkan pada Gambar 2. Data sEMG yang telah direkam terlebih dahulu melalui proses analisis frekuensi agar berbagai jenis derau dapat dikenali dan dieliminasi dengan mudah. Sinyal lalu difilter sesuai dengan hasil analisis frekuensi, disegmentasi berdasarkan linimasa skenario gerak dan diekstrak fiturnya. Setelah itu, fitur yang telah dihasilkan akan diklasifikasikan sesuai kelas yang telah ditentukan, yaitu gerak fleksi, ekstensi dan normal.
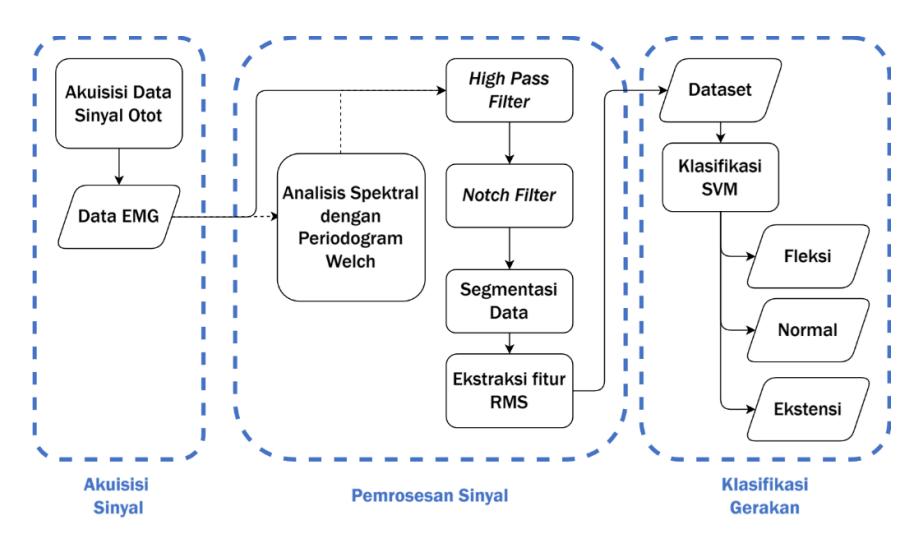
Gambar 2. Proses pengolahan sinyal sEMG.
2.1 Akuisisi Sinyal
Untuk menghasilkan analisis yang baik, skenario perekaman data dirancang agar pemotongan data dapat dilakukan sesuai dengan gerakan yang sedang dilakukan. Adapun linimasa dari skenario yang digunakan ditunjukkan pada Gambar 3. Sebelum melakukan akuisisi data, area kulit yang akan ditempel elektrode dibersihkan menggunakan alkohol dan dihilangkan rambut-rambutnya. Setelah itu, tiap 5 detik, subjek diminta untuk mengganti posisi pergelangan tangan dari normal, ekstensi, normal, fleksi dan diulang kembali hingga durasi sekitar 2 menit. Pada saat yang sama, gerakan yang dilakukan oleh subjek direkam melalui video sebagai justifikasi terhadap data sEMG yang direkam. Subjek yang dilibatkan pada penelitian ini adalah subjek sehat dan tidak memiliki cacat fisik dalam bentuk apapun. Subjek berjumlah tiga orang yang terdiri dari dua orang wanita (subjek 1 dan 2) dan seorang pria (subjek 3) yang diminta untuk melakukan skenario tiga jenis gerakan pada pergelangan tangan kanan.
Gambar 3. Linimasa skenario gerakan fleksi, ekstensi, dan normal.
Perekaman sinyal sEMG dilakukan dengan menggunakan OpenBCI Cyton Board: sampling rate 250 Hz, resolusi tegangan 0,298 μV/bit dan komunikasi bluetooth low energy (BLE). Perangkat ini mampu mengakomodasi kebutuhan frekuensi cacah yang cukup tinggi untuk menghindari munculnya aliasing dan kesesuaian dengan karakteristik sebaran frekuensi suatu sinyal sEMG yang cenderung sangat lebar (sampai dengan kisaran 400 Hz). Pengambilan data dilakukan pada dua otot terkait gerakan fleksi-ekstensi pergelangan tangan, yaitu extensor carpi radialis longus (kanal 1) dan otot flexor carpi radialis (kanal 2), seperti ditunjukkan pada Gambar 4a. Akan tetapi, hasil rekaman dengan OpenBCI Cyton masih menghasilkan sinyal sEMG dengan derau (Gambar 4b). Untuk merancang sistem pemrosesan sinyal yang sesuai, maka analisis spektral dengan metode Periodogram Welch perlu dilakukan. Berdasarkan hasil analisis, diketahui terdapat dua jenis derau yang dominan pada hasil rekaman sEMG, yaitu pada frekuensi 0 Hz dan 50 Hz (Gambar 4b). Kedua jenis derau ini muncul pada hasil rekaman karena adanya interferensi antara perangkat OpenBCI Cyton Board dengan komputer sekaligus dengan paparan gelombang jala-jala listrik AC yang ada di sekitarnya. Hasil ini nantinya akan menjadi dasar dari perancangan filter pada tahap pemrosesan sinyal selanjutnya.
(a) (b)
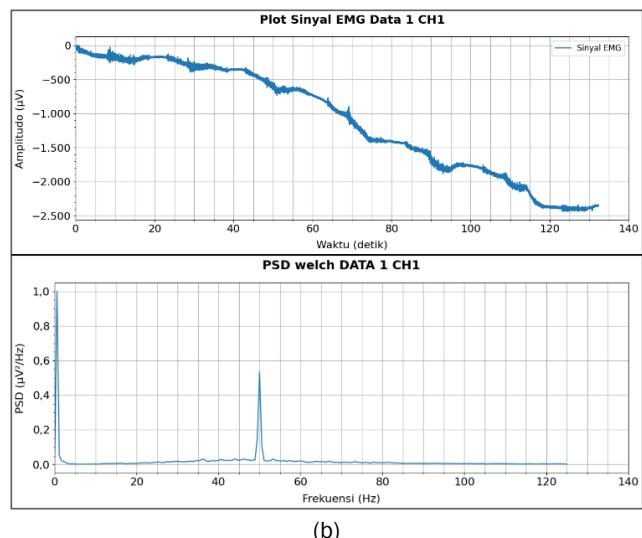
Gambar 4. (a) Proses pengambilan data dan posisi pemasangan elektrode sEMG, (b) Sinyal sEMG mentah dan hasil analisis spektralnya dengan Periodogram Welch.
2.2 Pemrosesan Sinyal
Pemrosesan pada sinyal yang telah didapatkan dilakukan dengan beberapa tahapan, meliputi pemfilteran, segmentasi data berdasarkan gerakan sesuai linimasa dan mengekstraksi fitur untuk mencari informasi signifikan untuk membedakan gerakan.
2.2.1 Pemrosesan dan Segmentasi Sinyal sEMG
Berdasarkan analisis spektral yang telah dilakukan, dirancang suatu filter untuk menghilangkan derau yang muncul, yaitu Butterworth high-pass filter orde 4 dengan frekuensi cut-off 20 Hz untuk menghilangkan DC offset dan artefak gerakan yang biasanya teramati pada frekuensi kurang dari 20 Hz [27] serta Butterworth notch orde 4 dengan frekuensi cut-off 48-52 Hz untuk mengatasi interferensi jaringan listrik pada 50 Hz. Setelah sinyal sEMG melalui tahap filter, sinyal ini kemudian dinormalisasi pada rentang [-1, 1] dengan minmax scaling agar aktivitas dari otot yang berbeda dapat dibandingkan secara lebih setara. Adapun sinyal sEMG yang telah difilter dan dinormalisasi ditunjukkan pada Gambar 5. Sinyal sEMG setelah prapemrosesan mulai dapat memperlihatkan pola kontraksi (segmen merah), normal (segmen hijau) dan relaksasi (segmen kuning) pada otot yang sedang ditinjau. Pola kontraksi-relaksasi ditunjukkan dengan adanya kenaikan dan penurunan ragam amplitudo pada sinyal yang berhasil terekam.
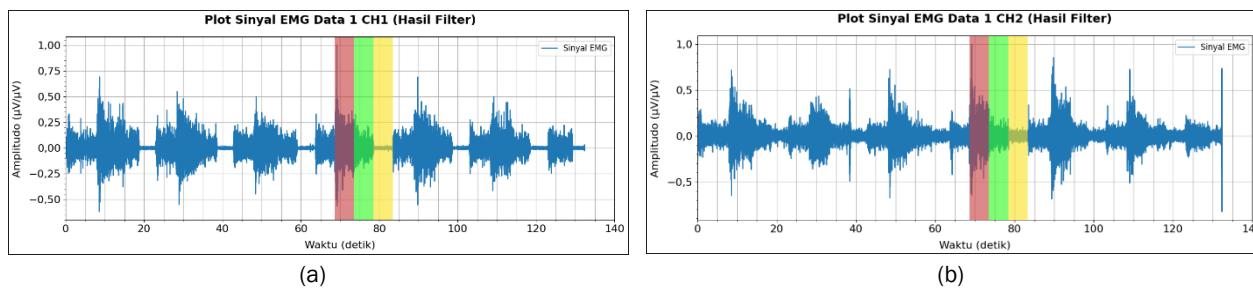
Gambar 5. Contoh sinyal hasil prapemrosesan untuk masing-masing kanal.
Untuk melakukan proses klasifikasi, maka data yang telah melalui tahap prapemrosesan perlu disegmentasi untuk diekstrak fiturnya. Segmentasi dilakukan secara manual sesuai dengan linimasa skenario gerak pada sinyal sEMG dari kedua kanal sehingga sinyal akan masuk ke dalam tiga kategori gerak, yaitu fleksi, ekstensi dan normal. Setelah segmen-segmen sinyal didapatkan, proses selanjutnya adalah melakukan ekstraksi fitur terhadap segmen sinyal tersebut.
2.2.2 Ekstraksi Fitur
Fitur yang diekstrak dari sinyal sEMG untuk tiap segmen merupakan fitur dalam domain waktu agar beban komputasi untuk keperluan aplikasi pada waktu nyata menjadi jauh lebih rendah. Hal ini membuat sistem antarmuka otot-komputer yang diteliti selanjutnya menjadi lebih mungkin untuk dilakukan dengan mengenali perintah-perintah secara langsung. Fitur sEMG yang dipilih adalah moving RMS yang mampu
merepresentasikan daya sinyal dalam jendela waktu tertentu seperti ditunjukkan pada persamaan 1. Untuk memudahkan proses pengolahan data selanjutnya, data nilai moving RMS yang didapatkan lalu dicari nilai moving RMS envelope-nya dengan menggunakan persamaan 2.
\[y_{RMS}(n) = \left(\frac{1}{N} \sum_{n=0}^{T-1} x^2(n)\right)^{1/2} \tag{1}\]
\[y_{RMS}(n) = \left(\frac{1}{N} \sum_{n=0}^{T-1} x^{2}(n)\right)^{1/2}\] \[y_{e}(n) = \frac{1}{N} \sum_{i=n-\frac{window}{2}}^{n+\frac{window}{2}} y_{RMS}(i).r(n-1)\] (2)
Proses ekstraksi dilakukan dengan menggunakan ukuran jendela sebesar 12 sampel yang bergeser tiap satu sampel. Data fitur-fitur tersebut kemudian dibangun menjadi dataset pelatihan dan pengujian klasifikasi menggunakan SVM dengan dua fitur dan tiga kelas. Dua fitur yang digunakan adalah nilai moving RMS envelope dari sinyal sEMG pada kanal 1 dan kanal 2. Tiga kelas yang dimaksud dalam hal ini adalah gerakan yang dilakukan oleh subjek, yaitu kelas ekstensi, kelas fleksi dan kelas normal.
Tahapan pembuatan dataset dilakukan sesuai dengan Gambar 6a. Adapun data dari tiap subjek akan digunakan untuk membangun satu dataset. Pembuatan dataset dilakukan dengan mengelompokkan data yang telah tersegmentasi berdasarkan jenis geraknya sehingga terbentuk satu serial data yang hanya terdiri dari satu kelas gerak saja. Setelah itu, tiap segmen dari masing-masing kelas gerakan dihitung nilai moving RMS-nya. Pada langkah selanjutnya, tiap segmen pada serial data RMS dibagi menjadi tiga subsegmen dengan lebar yang sama dan dihitung rata-rata RMS-nya sehingga didapatkan tiga nilai rata-rata RMS pada masing-masing subsegmen data yang akan mewakili tiap segmen dalam kelas gerakan tersebut (Gambar 6b). Data rerata tiap segmen ini dikelompokkan sesuai kelas gerakan dari segmen tersebut sehingga terbentuklah sebuah dataset. Proses pada diagram alir di Gambar 6a diulang untuk data dari tiga subjek yang telah diakuisisi dan jumlah sampel yang terkumpul setelah dilakukan ekstraksi fitur per kanalnya diberikan pada Tabel 1.
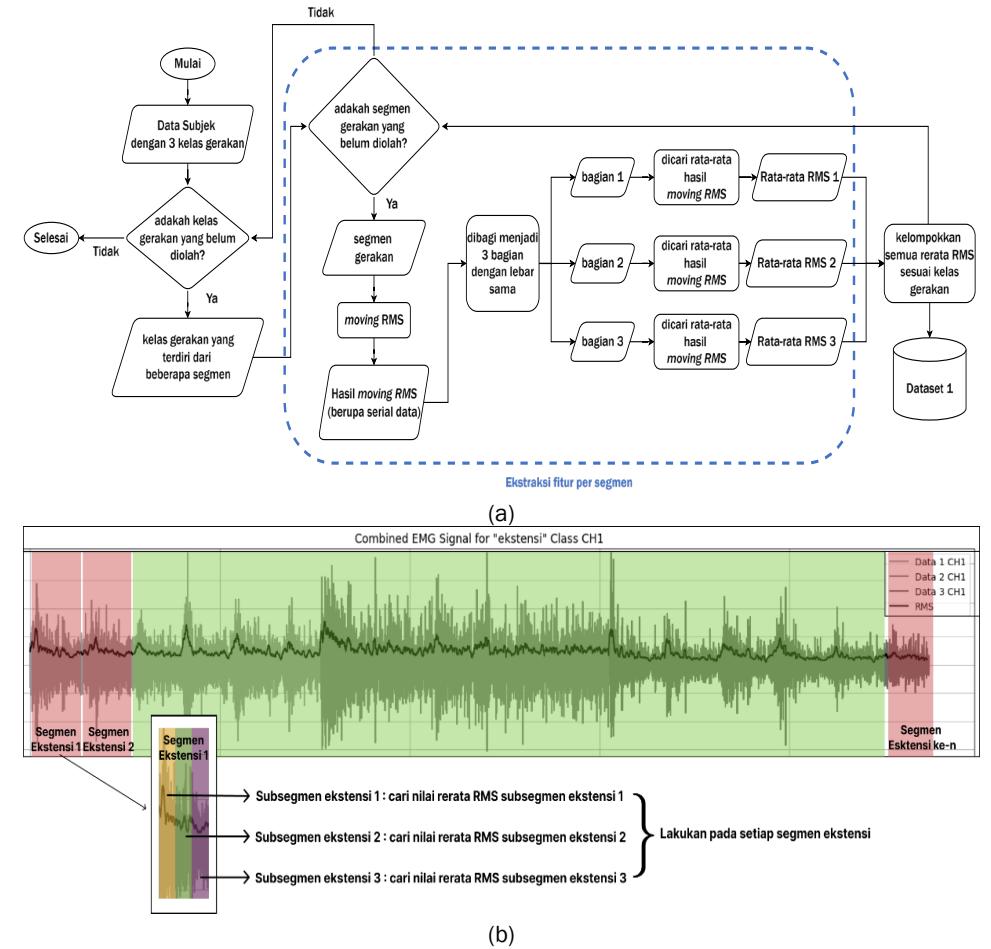
Gambar 6. (a) Diagram alir ekstraksi fitur menggunakan rerata hasil moving RMS untuk tiap subjek, (b) ilustrasi segmentasi data dan posisi subsegmen data.
https://doi.org/10.5614/joki.2024.16.2.10 E-ISSN: 2460-6340
Tabel 1. Jumlah sampel tiap kanal hasil ekstraksi fitur.
| Kelas | Jumlah Sampel | ||
|---|---|---|---|
| Normal | 117 | ||
| Ekstensi | 54 54 | ||
| Fleksi | |||
| Total | 225 | ||
2.3 Algoritma Klasifikasi Support Vector Machine
Algoritma klasifikasi yang digunakan pada penelitian ini adalah SVM. SVM dipilih karena kemampuannya dalam menangani data dengan jumlah kecil dan kinerja yang baik dalam masalah klasifikasi multikelas. Pada suatu algoritma SVM, tiap kelas data dipisahkan melalui pemilihan suatu fungsi yang akan membentuk sebuah hyperplane berdasarkan titik-titik data yang dianggap sebagai suatu vektor pendukung (support vector). Fungsi ini dikenal sebagai fungsi kernel. Pada penelitian ini, perlu digunakan suatu fungsi kernel yang mampu memisahkan data dengan jumlah kelas lebih dari dua dengan sebaran yang mungkin non-linier. Oleh karena itu, fungsi kernel yang digunakan pada penelitian ini adalah radial base function (RBF), lihat persamaan 3, yang memiliki kemampuan untuk menangani klasifikasi nonlinear dengan membuat hyperplane yang mampu melakukan klasifikasi dengan lebih baik. Pada fungsi RBF, terdapat beberapa parameter yang perlu diatur, salah satunya adalah yang menggambarkan seberapa jauh suatu titik dianggap sebagai sebuah vektor pendukung.
\[\kappa(\chi_i \cdot \chi_j) = \exp\left(-\gamma \|\chi_i - \chi_j\|^2\right) \tag{3}\]
Parameter yang digunakan dalam kernel ini diatur dengan nilai = 0,7. Pengaturan nilai telah didapatkan dari hasil iterasi percobaan untuk mendapatkan hyperplane terbaik. Selanjutnya, klasifikasi multikelas pada SVM dilakukan dengan skema one-versus-one (OVO). Model SVM dilatih dengan menggunakan dataset yang telah disiapkan dan kemudian dievaluasi untuk mengukur kinerjanya dalam mengklasifikasikan gerakan berdasarkan sinyal EMG dua kanal. Metrik yang digunakan untuk mengevaluasi performa adalah confusion matrix, akurasi, presisi, sensitivitas, dan f1-score. Data yang akan digunakan sebagai masukan SVM dibagi menjadi 50% data latih dan 50% data uji yang berbeda.
3. Hasil dan Diskusi
Confusion matrix yang ditampilkan pada Gambar 7a menunjukan seberapa banyak prediksi benar dan salah yang dilakukan oleh pengklasifikasi SVM. Dari 59 sampel uji untuk gerakan normal, model memprediksi benar sebagai gerakan normal sejumlah 55 sampel, tetapi salah memprediksi 3 sampel sebagai ekstensi dan 1 sampel sebagai fleksi. Pada gerakan ekstensi, dari 28 sampel uji, model memprediksi benar sebagai gerakan ekstensi sejumlah 25 sampel, tetapi salah memprediksi sebagai gerakan normal sejumlah 3 sampel. Pada gerakan fleksi, dari 26 sampel uji, model memprediksi benar sebagai fleksi sejumlah 22 sampel, tetapi salah memprediksi sebagai gerakan normal sejumlah 4 sampel. Hal ini menunjukkan bahwa model SVM mampu mengklasifikasikan gerakan normal, ekstensi dan fleksi dengan baik.
Nilai dari akurasi, presisi, sensitivitas dan f1-score memiliki perbedaan yang kecil. Hal ini menunjukkan bahwa model SVM bekerja dengan baik dan konsisten. Performa yang diperoleh dari klasifikasi SVM memiliki akurasi 90,27% untuk gerakan pergelangan tangan (Gambar 7b). Hasil ini mendekati performa klasifikasi SVM dengan fitur RMS untuk peningkatan performa tangan prostetik dengan pembelajaran mesin pada sistem tertanam sebesar 90-95% [7]. Sistem SVM dengan fitur RMS ini masih dapat melakukan klasifikasi dengan baik, meskipun dengan jumlah subjek yang sedikit.
Jurnal Otomasi Kontrol dan Instrumentasi Vol 16 (2), 2024 ISSN: 2085-2517 https://doi.org/10.5614/joki.2024.16.2.10 E-ISSN: 2460-6340
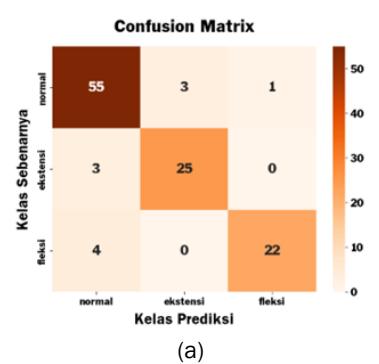
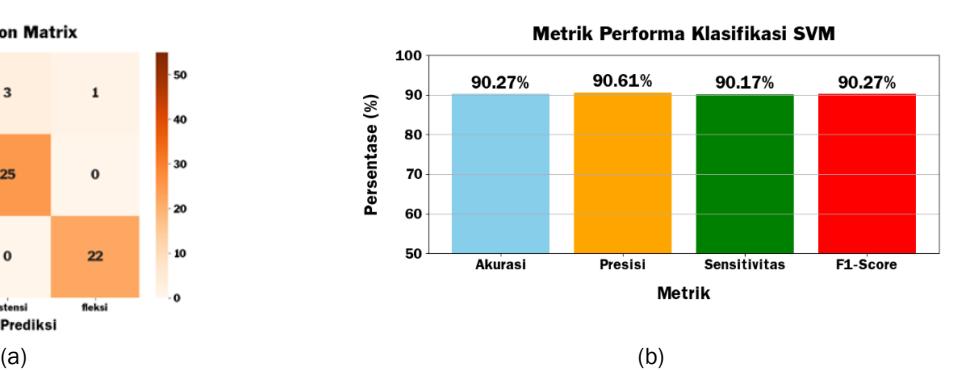
Gambar 7. (a) Confusion matrix untuk gerakan pergelangan tangan (b)grafik performa klasifikasi SVM untuk gerakan pergelangan tangan.
4. Kesimpulan
Pengembangan antarmuka otot-komputer telah berhasil dirancang dengan beberapa sasaran utama yang tercapai. Akuisisi dan pemrosesan sinyal sEMG untuk pergerakan pergelangan tangan telah dirancang dengan baik, memungkinkan ekstraksi fitur sinyal menggunakan metode rerata moving RMS. Hal ini memastikan bahwa data hasil pengolahan dapat dimanfaatkan untuk keperluan klasifikasi. Selain itu, pelatihan dan pengujian klasifikasi secara luring dan tidak dalam waktu nyata untuk gerakan fleksi, ekstensi dan normal pada pergelangan tangan telah dirancang menggunakan algoritma SVM multikelas dengan metode oneversus-one (OVO). Dataset yang dibangun menggunakan reduksi data dari keseluruhan data subjek memberikan hasil dengan akurasi 90,27%, presisi 90,61%, sensitivitas 90,17% dan f1-score 90,27%.
Nomenklatur
| 𝑦𝑦𝑅𝑅𝑅𝑅𝑅𝑅(𝑛𝑛) | = | Nilai RMS sinyal | 𝑤𝑤 𝑤𝑤𝑤𝑤𝑤𝑤 | = | Ukuran jendela |
|---|---|---|---|---|---|
| 𝑥𝑥(𝑛𝑛) | = | Sinyal masukan | 𝑟𝑟 | = | Rectangular window |
| 𝑛𝑛 | = | Indeks sampel | 𝜅𝜅 | = | Fungsi kernel |
| 𝑁𝑁 | = | Jumlah sampel | �𝜒𝜒𝑖𝑖 − 𝜒𝜒𝑗𝑗� | = | Jarak Euclidean antara vektor 𝜒𝜒𝑖𝑖 dan 𝜒𝜒𝑗𝑗 |
| 𝑇𝑇 | = | Interval sampel yang dihitung | 𝛾𝛾 | = | Parameter RBF kernel |
| 𝑦𝑦𝑒𝑒(𝑛𝑛) | = | Nilai envelope |