
1 Pendahuluan
Sektor perdagangan menjadi faktor penentu pertumbuhan konsumsi masyarakat dalam perekonomian nasional. Pembangunan infrastruktur konektivitas memberikan kemudahan bagi produsen dalam akses pengadaan bahan baku, barang modal, serta pemasaran produk untuk meningkatkan efisiensi biaya logistik. Pengusaha pada sektor produksi dan distribusi menyeimbangkan nilai pengeluaran dari total biaya produksi terhadap keuntungan biaya logistik dengan memastikan kendaraan dapat mengangkut muatan yang lebih banyak untuk meningkatkan efisiensi waktu. Indikator kelebihan muatan pada kendaraan diketahui dari keseimbangan, percepatan, suspensi, struktur roda, dan konsumsi bahan bakar. Kendaraan overload memberi dampak kerusakan struktural jalan dan jembatan, yaitu penurunan masa pakai, kerusakan pondasi, erosi, dan penurunan kekuatan konstruksi. Secara mekanika, kendaraan overload menambah besar tegangan konstruksi terhadap nilai referensi tegangan menyebabkan kondisi overstress. Tegangan yang berlebih memberikan deformasi permanen pada konstruksi jalan, sehingga material permukaan mengalami crack lebih cepat [1].
Berdasarkan penelitian bahwa kendaraan berat atau truk berpengaruh dominan terhadap massa muatan yang diangkut pada jalan dan jembatan. Truk merupakan alat pengangkut dominan untuk mengantarkan barang dari produsen kepada distributor atau industri kecil [1]. Selain mengakibatkan kerusakan konstruksi pada jalan dan
jembatan, kelebihan muatan dapat meningkatkan resiko keamanan dan kecelakaan [2]. Untuk mengatasi permasalahan tersebut maka diperlukan pengembangan prototipe pengangkut semi-otomatis yang dilengkapi dengan sistem pengukuran massa muatan dan kecepatan pengangkut sebagai alat bantu. Hal ini bertujuan agar pengangkut dapat mendeteksi massa beban yang diangkut sehingga mencegah terjadinya overload yang dapat mengakibatkan kerusakan baik pada pengangkutnya, jalan dan mengancam keamanan para pengguna jalan. Oleh sebab itu, sebagai tahap awal dalam menguji kemampuan logging data dari sensor, prototipe pengangkut diuji dengan mengangkut beban 2 kg.
Penggunaan sensor load cell yang dapat menimbang beban kecil merupakan salah satu elemen penting dalam proses pengangkutan muatan karena memungkinkan pengukuran yang lebih akurat terhadap distribusi beban yang diangkut [3]. Sensor load cell dipasang pada bagian bawah dek penampang untuk mengukur massa muatan dan sensor IR Speed dipasang pada celah piringan rotary encoder untuk mengontrol kecepatan pengangkut. Kedua sensor ini digunakan untuk menjaga kinerja mesin bekerja optimal dan efisiensi daya pengangkut dengan mengetahui pengukuran massa muatan dan kecepatan dalam kondisi dinamis [4], [5], [6]
. Pengukuran massa muatan dan kecepatan pengangkut dengan sensor ini memiliki kelebihan dibandingkan metode pengujian weighing in motion dan timbangan jembatan [7]. Pengangkut dipasang sensor secara permanen pada plat penampang dan bekerja secara real-time dalam mengukur massa muatan, sehingga tidak membutuhkan bidang datar dan lubang pemasangan pada permukaan jalan untuk mencegah terjadinya pengurangan massa muatan [8], [9].
Kinerja sistem sensor pada prototipe sejenis diverifikasi berdasarkan kalibrasi secara berkala pada pengukuran massa muatan, kecepatan kendaraan, dan jarak deteksi halangan [10]. Pengembangan prototipe pada kasus [10] dibatasi oleh biaya pemasangan sensor yang mahal, modifikasi kendaraan dan tingkat fluktuasi pada akurasi dan presisi yang dipengaruhi kecepatan, bidang lintasan, daya, suhu, dan kelembapan.
Penelitian sejenis membahas pengangkutan muatan dari berbagai aspek seperti ketelitian pengukuran beban [3], pengujian putaran motor terhadap perubahan tegangan terminal [11], penentuan nilai torsi efektif agar mampu menahan beban tanpa merusak motor [12]. Pengembangan prototipe dengan cara memodifikasi gerobak sorong dengan menambahkan motor DC dilaporkan pada [13] dan [14].
Prinsip-prinsip di atas diacu pada penelitian ini untuk membuat prototipe pengangkut muatan skala laboratorium dengan kapasitas massa muatan dibatasi maksimal 2 kg. Penelitian ini menguji sistem pengukuran massa, kecepatan, dan jarak halangan pada prototipe tersebut, serta mengevaluasi pengaruh massa muatan dan bidang lintasan terhadap kecepatan dan daya pengangkut, baik dalam kondisi statis maupun dinamis.
2 Metode
Pengembangan prototipe dilakukan dengan tahapan perancangan, kalibrasi sensor massa, kalibrasi sensor kecepatan, kalibrasi sensor jarak, pengujian deteksi kecepatan pengangkut terhadap variasi beban muatan pada bidang datar, dan analisis data hasil pengujian untuk mendapatkan karakteristik pengukuran sistem ini.
Agar prototipe dapat mengukur kecepatan dan massa muatan, dirancang prinsip kerja prototipe dalam bentuk diagram blok seperti pada Gambar 1.
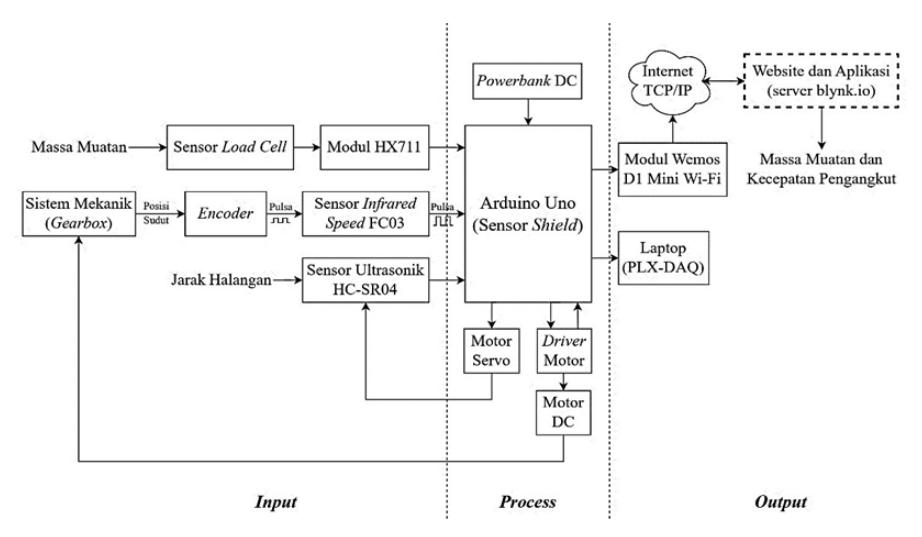
Gambar 1. Diagram blok prototipe
Cara kerja sistem ini adalah motor DC berputar untuk menggerakan kedua roda, kemudian sensor load cell mengukur massa muatan yang dibawa. Baik ketika pengangkut bergerak tanpa muatan maupun dengan membawa muatan, sensor optocoupler akan mengukur kecepatan putaran roda dalam RPM [15]. Jika ada halangan maka sensor ultrasonik akan mendeteksi keberadaan objek dalam jarak 4 cm di depan benda dan memberikan perintah kepada driver motor untuk berbelok ke kiri, ke kanan atau berhenti. Sebaliknya, jika tidak ada halangan benda yang dideteksi maka pengangkut akan bergerak maju. Media untuk meletakkan muatan pada landasan muatan yang berupa plat besi ringan (tempat membawa benda atau anak timbangan) diberi penahan agar tidak mengalami guncangan agar tidak mempengaruhi pengukuran. Program ini merupakan kontroler untuk pengangkut yang digerakkan oleh motor DC, dengan kemampuan mendeteksi jarak halangan menggunakan sensor ultrasonik, mengukur massa muatan menggunakan load cell, dan menghitung kecepatan motor menggunakan sensor inframerah [16], [17]. Ringkasan cara program ini beroperasi terdapat pada Gambar 2.
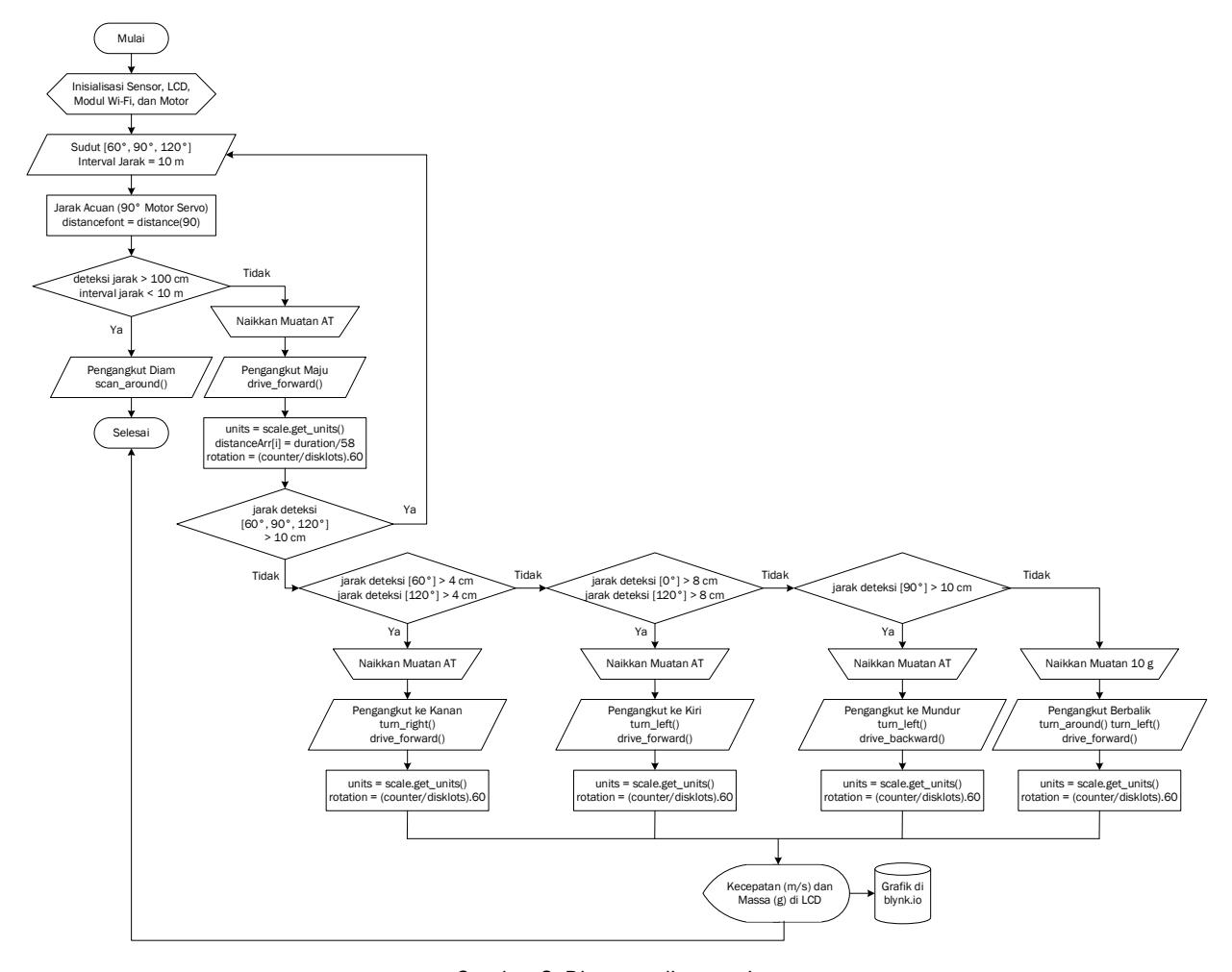
Gambar 2. Diagram alir prototipe
3 Hasil dan Diskusi
Hasil pengujian yang didapatkan dalam pembuatan prototipe pengangkut muatan semi-otomatis kapasitas 5 kg menggunakan sensor load cell, optocoupler, dan ultrasonik. Pengujian yang dilakukan meliputi kalibrasi masingmasing sensor yaitu sensor kecepatan, sensor load cell dan sensor jarak untuk mengetahui karakteristik prototipe pengangkut muatan semi otomatis.
Gambar 3(a) dan Gambar 3(b) menunjukkan desain dan implementasi prototipe pengangkut muatan semiotomatis kapasitas 2 kg berbasis internet of vehicle menggunakan sensor load cell, optocoupler, dan ultrasonik yang disertai dengan sistem mekanik berupa motor DC, motor servo, driver motor L298N yang di kontrol dengan mikrokontroler Arduino Uno dalam proses pengukuran.
3.1 Kalibrasi Sensor Massa
Kalibrasi massa pada sensor load cell dilakukan dengan membandingkan hasil pengukuran sensor load cell dengan standar yaitu anak timbangan M1 yang mempunyai ketelitian pembacaan 0,01 g. Pengambilan data kalibrasi massa dilakukan dengan total pembacaan sebanyak 10 kali pengukuran di setiap massa nominal anak timbangan standar.
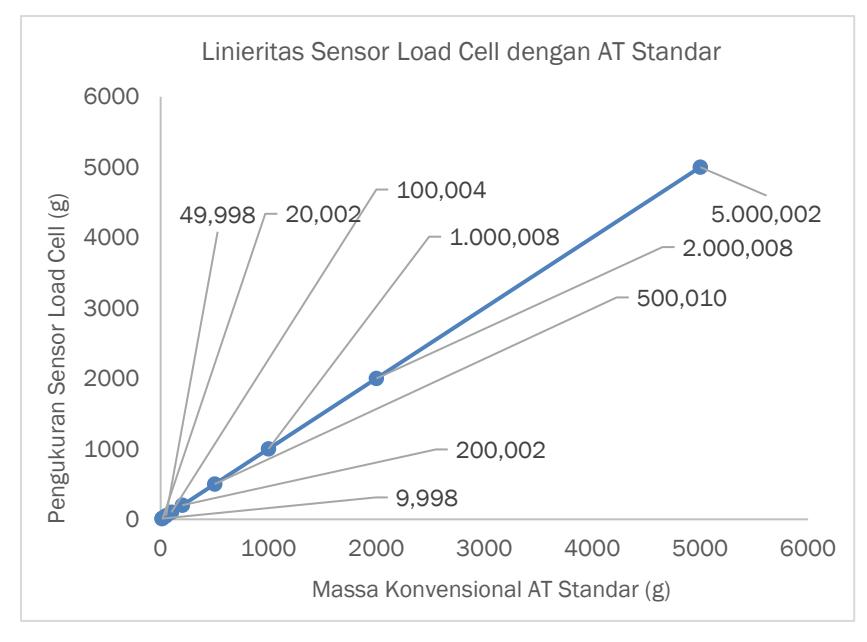
Gambar 4. Grafik linieritas sensor load cell
Diketahui bahwa kalibrasi massa anak timbangan 1000 g pada sensor load cell menghasilkan rata-rata pengukuran sebesar 1000,08 g dengan standar deviasi 0,015 g. Koefisien korelasi grafik pada Gambar 4 mendekati nilai 1 yang menyatakan bahwa pengujian mendekati linier, sensitivitas ideal dan bekerja responsif.
3.2 Kalibrasi Sensor Kecepatan
Kalibrasi kecepatan putaran pada sensor optocoupler dilakukan dengan membandingkan nilai pengukuran oleh sensor optocoupler terhadap tachometer standar standar dengan ketelitian pembacaan 0,1 RPM. Pengambilan data kalibrasi massa dilakukan dengan total pengukuran sebanyak 10 kali di setiap pilihan kecepatan roda.
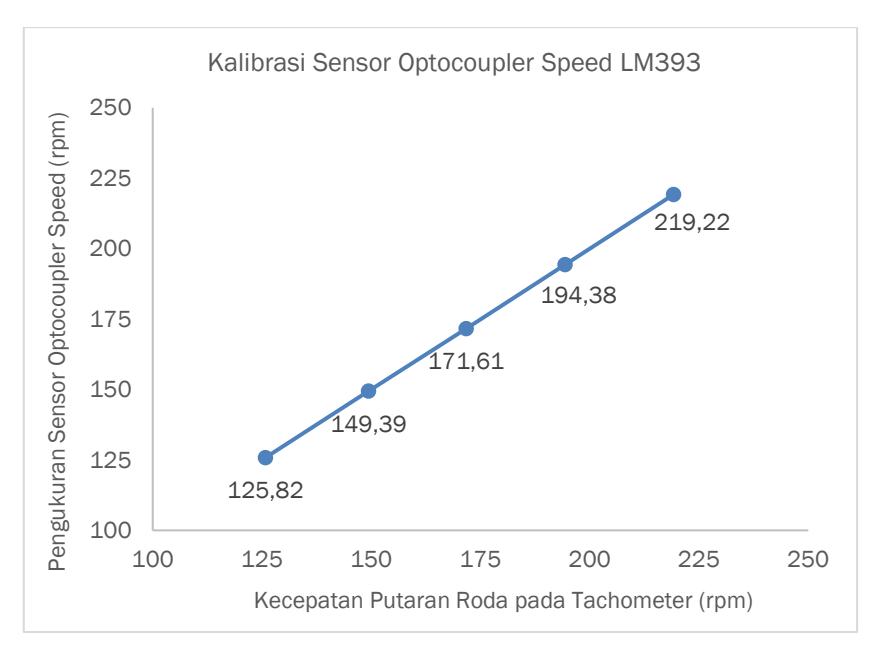
Gambar 5. Grafik pengujian linieritas sensor optocoupler
Gambar 5 menunjukkan bahwa hasil pengukuran sensor optocoupler LM393 dibandingkan dengan tachometer adalah linier dengan nilai koefisien korelasi R2 adalah 1.
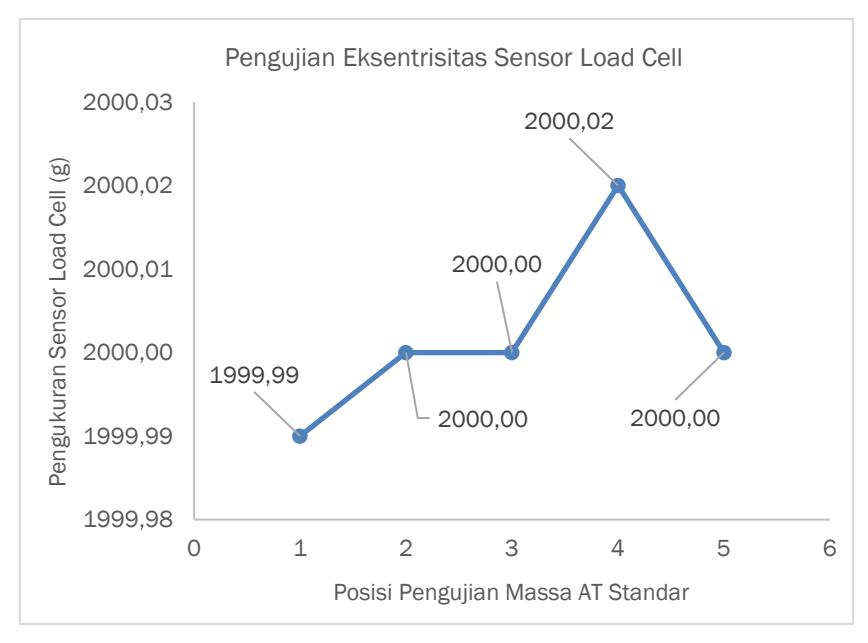
Gambar 6. Grafik pengujian eksentrisitas sensor load cell
Pengujian eksentrisitas sensor load cell dilakukan meletakkan beban 2 kg dan menggesernya menuju lima titik uji yaitu mulai dari ujung pan pengangkut (titik 1) menuju titik tengah pan (titik 5). Hasil pengujian ditunjukkan pada Gambar 6 di mana tiap titik menghasilkan nilai rata-rata dan standard deviasi kesalahan pengukuran kurang dari 0,01% massa beban.
3.3 Kalibrasi Sensor Jarak
Kalibrasi jarak pada sensor ultrasonik dilakukan dengan membandingkan hasil pengukuran sensor ultrasonik dengan standar yaitu komparator sidang dengan ketelitian pengukuran 0,01 cm. Pengambilan data kalibrasi jarak dilakukan sebanyak 10 kali pengukuran di setiap jarak deteksi yang ditentukan menggunakan komparator sidang.
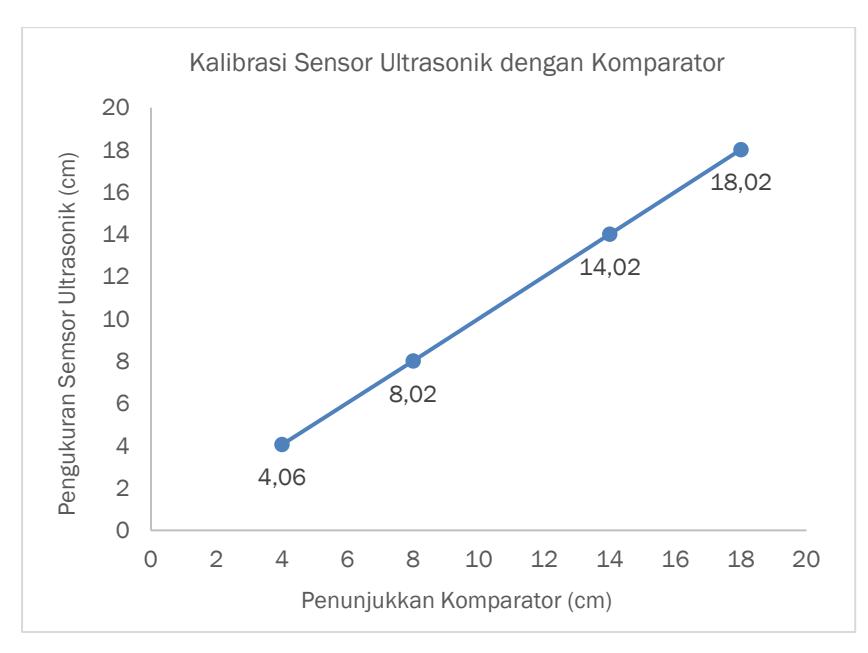
Gambar 7. Grafik pengujian linieritas sensor ultrasonik
Pada Gambar 7 pengujian linieritas sensor ultrasonik yang dibandingkan dengan komparator sidang adalah linier dengan nilai R2 sebesar 1 menunjukkan bahwa sensitivitas sensor ideal dan bekerja responsif.
3.4 Pengujian Kecepatan Motor DC dengan Muatan pada Bidang Datar
Pengujian kecepatan pengangkut muatan dilakukan dalam kondisi dinamis dengan jarak lintasan pengangkut sebesar 1 meter pada bidang datar, di mana nilai gaya gesek antara ban dan permukaan bidang diabaikan. Berdasarkan hasil pengujian pada bidang datar menunjukkan bahwa semakin besar massa muatan maka kecepatan pengangkut menurun secara landai, seperti yang dapat dilihat pada Gambar 8.
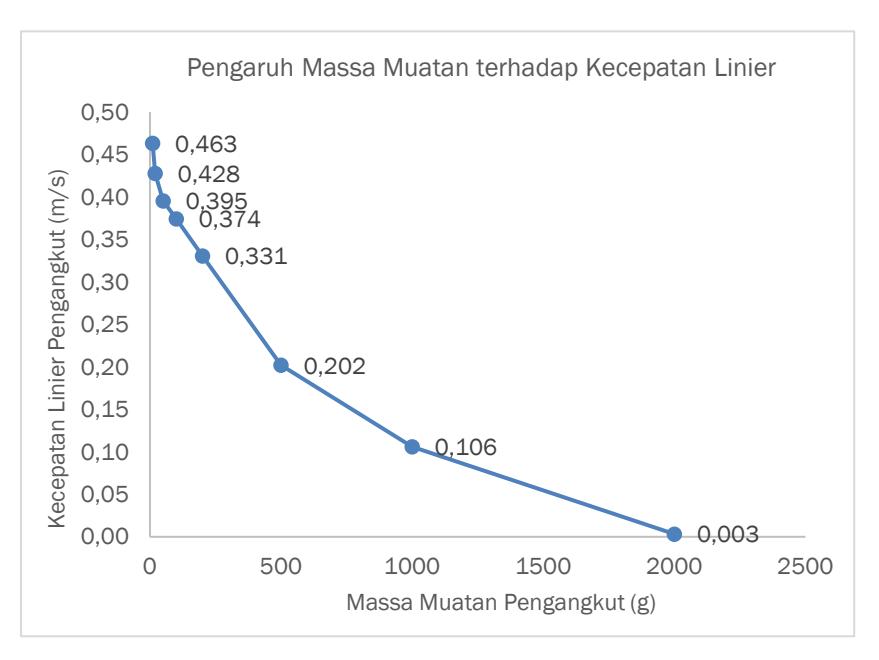
Gambar 8. Grafik pengaruh massa muatan terhadap kecepatan linier pengangkut
Gambar 8 menunjukkan bahwa pengaruh variasi massa muatan dari 0 sampai 2 kg terhadap kecepatan pergerakan linier pengangkut membentuk kurva eksponensial, Semakin besar massa muatan, maka kecepatan motor semakin berkurang. Jika dibandingkan dengan beberapa penelitian maka untuk pengukuran pada kondisi bermuatan menunjukkan bahwa terdapat perubahan kecepatan seiring dengan perubahan muatan, serta adanya kesalahan pengukuran saat pengujian dilakukan dalam kondisi bergerak.
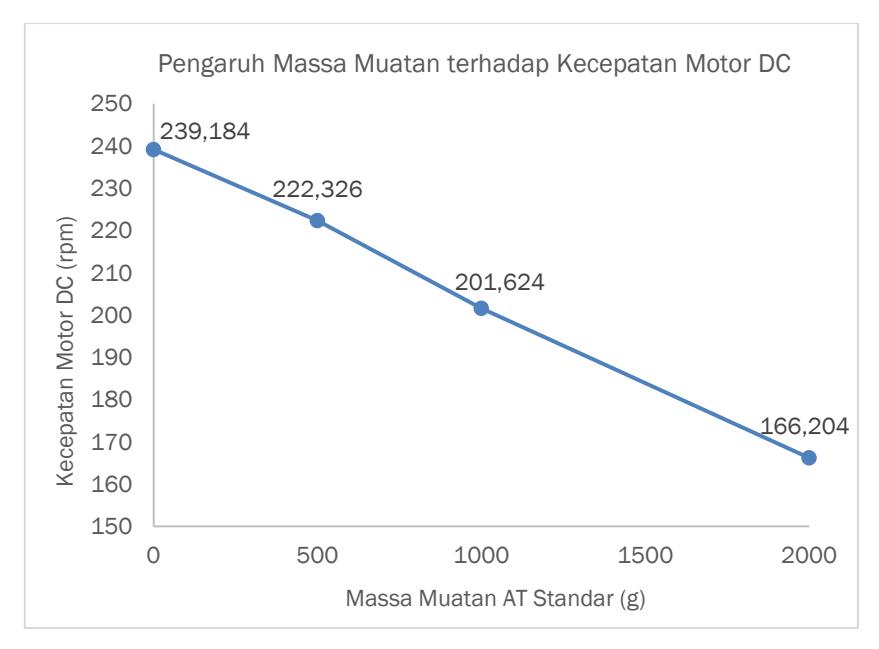
Gambar 9. Grafik pengaruh massa muatan terhadap kecepatan motor DC
Gambar 9 menunjukkan grafik pengaruh penambahan massa muatan terhadap kecepatan motor DC. Semakin besar nilai massa muatan pada pengangkut maka nilai kecepatan motor DC semakin kecil. Hal ini dipengaruhi oleh gaya berat pada gerak translasi dan daya mekanik pengangkut bekerja lebih besar sehingga besar tegangan yang diberikan pada motor DC semakin kecil.
3.5 Pengujian Sensitivitas Sensor Ultrasonik terhadap Jarak Deteksi Halangan
Pengujian sensitivitas deteksi jarak terhadap respon kecepatan pengangkut dilakukan dengan membandingkan jarak acuan pada sudut 90° dengan jarak rata-rata pada sudut 60° dan 120°, dan mengukur kecepatan motor DC dengan jari-jari roda sebesar 2,85 mm, serta menentukan respon pergerakan seperti pada Tabel 1.
| Massa Nominal (g) | Standar (cm) | θservo (°) | Pengukuran Sensor | - Rata-Rata Jarak | Rota Rota Tarai | Error | _ | |
| Jarak (cm) | Torsi (rpm) | (cm) | Rata-Rata Torsi (rpm) | (cm) | Arah Motor DC | |||
| 0 | 4 | 60 | 4,11 | 268,71 | 4,09 | 259,45 | -0,11 | Kanan |
| 10 | 90 | 4,03 | 260,18 | -0,03 | Mundur | |||
| 20 | 120 | 4,13 | 249,45 | -0,13 | Kanan | |||
| 50 | 8 | 60 | 8,14 | 239,82 | 8,11 | 230,76 | -0,14 | Kiri |
| 100 | 90 | 8,07 | 231,14 | -0,07 | Mundur | |||
| 200 | 120 | 8,12 | 221,33 | -0,12 | Kiri | |||
| 500 | 10 | 60 | 10,10 | 212,07 | 10,09 | 202,30 | -0,10 | Putar Balik |
| 1000 | 90 | 10,11 | 201,19 | -0,11 | Mundur | |||
| 2000 | 120 | 10,05 | 193,64 | -0,05 | Putar Balik | |||
Tabel 1. Hasil pengujian sensitivitas deteksi jarak terhadap respon kecepatan
Berdasarkan Tabel 1, pada pengujian dengan jarak acuan 8 cm diperoleh nilai rata-rata pengukuran jarak pada sensor ultrasonik sebesar 8,11 cm dan nilai rata-rata pengukuran kecepatan motor DC pada sensor IR Speed sebesar 230,76 rpm dengan respon arah pergerakan motor DC ke arah kiri dan mundur. Pada pengujian dengan jarak acuan 4 cm, 8 cm, dan 10 cm, diperoleh kesalahan pengukuran –0,11 hingga –0,03 dengan pergerakan mundur. Pada pengujian jarak acuan 4 cm, diperoleh kesalahan pengukuran –0,13 hingga –0,11 dengan pergerakan kanan. Pada pengujian jarak acuan 8 cm, diperoleh kesalahan pengukuran –0,14 hingga –0,12 dengan pergerakan kiri. Pada pengujian jarak acuan 10 cm, diperoleh kesalahan pengukuran –0,10 hingga –0,05 dengan pergerakan putar balik.
3.6 Pengujian Konsumsi Daya Listrik Pengangkut
Pengujian konsumsi daya listrik dilakukan dengan menghubungkan powerbank dengan komponen elektronika pada pengangkut hingga baterai habis dalam keadaan pengangkut semi-otomatis membawa massa muatan bervariasi seperti pengujian kecepatan pengangkut di bidang datar dalam kondisi dinamis. Untuk menentukan hubungan massa muatan dan daya tahan powerbank maka dilakukan pengukuran tegangan output dan arus output pada sistem prototipe saat beroperasi dalam kondisi optimal. Dengan mengacu pada selisih perubahan daya powerbank maka tegangan output dan arus output pada Tabel 2 diukur hanya pada kondisi pengangkut membawa massa muatan 100 g dan 2000 g.
Massa Muatan (g) Vout (V) Iout (A) Plistrik (W) Kapasitas Powerbank yang digunakan (mAh) T (menit) Torsi (rpm) Konsumsi Daya Listrik Pengangkut (Wh) 100 5,03 2,14 10,76 800 3,5 262,20 0,63
2000 4,97 1,22 6,06 800 24,2 151,51 2,45
Tabel 2. Hasil pengujian konsumsi daya listrik pengangkut
Berdasarkan hasil pengujian konsumsi daya listrik pengangkut pada Tabel 2 menunjukkan bahwa semakin besar massa muatan, maka daya listrik yang dihasilkan semakin kecil dan waktu yang dibutuhkan untuk mengangkut muatan semakin lama karena kecepatan berkurang. Oleh sebab itu, konsumsi daya listrik pengangkut juga semakin bertambah seiring dengan penambahan massa muatan.
Pada saat awal pengujian kapasitas powerbank adalah 100% atau 20000 mAh. Pengujian daya listrik powerbank dilakukan pada massa muatan 100 g, 200 g, 500 g, 1000 g, dan 2000 g. Setelah semua pengujian dilakukan kapasitas powerbank yang tersisa adalah 27% atau 5400 mAh. Selama pengujian didapatkan juga bahwa daya tahan powerbank maksimal selama 27,7 menit dengan nilai kecepatan maksimum tanpa muatan secara konstan dan daya tahan powerbank minimum sebesar 3,5 menit dengan 50% dari nilai kecepatan maksimum membawa muatan secara konstan. Oleh karena itu, disimpulkan bahwa kecepatan berbanding lurus dengan tegangan output dan berpengaruh pada daya tahan powerbank.
4 Kesimpulan
Prototipe ini dapat mengukur massa muatan pada pengangkut dengan berbagai hasil pengujian yaitu sensor optocoupler mampu mengukur kecepatan, dan sensor ultrasonik dapat mengukur jarak deteksi halangan dari sudut 0° hingga 180°. Ketika pengangkut diberikan penambahan massa muatan secara bertahap maka akan diperoleh nilai hasil pengukuran kecepatan semakin kecil yaitu saat muatan 10,05 gram rata-rata kecepatan 0,46 m/s2, pada muatan 2 kg kecepatan semakin turun yaitu rata-rata 0,004 m/s2, menghasilkan kurva eksponensial. Kemampuan motor DC menurun dengan penambahan muatan yaitu dari 239,184 rpm menjadi 166,204 rpm dan begitu juga pada kapasitas powerbank dari 20000 mhA menjadi 5400 mhA. Pada kondisi pengukuran dinamis yaitu pengukuran dilakukan saat motor jalan terjadi kesalahan pengukuran rata-rata –0,11 hingga –0,03 cm dengan pergerakan mundur.
Ucapan Terima kasih
Terimakasih diucapkan kepada Akademi Metrologi, Kementerian Perdagangan yang telah memfasilitasi pelaksanaan riset ini.