
1 Pendahuluan
Motor DC (Direct Current) banyak digunakan sebagai penggerak pada bidang industri dan robotika, namun memiliki kecepatan putaran yang tidak stabil sehingga diperlukan suatu pengontrol untuk menstabilkan kecepatan putarannya [1]. Motor DC digunakan sehari-hari karena berbagai kelebihannya, dan sudah menjadi kebutuhan penting dalam aktivitas manusia. Motor DC dengan efisiensi pengoperasian yang tinggi dan kontrol kecepatannya stabil merupakan aktuator yang baik [2]. Masalah utama pada motor DC adalah bagaimana mengendalikan kecepatannya sesuai referensi tertentu [3]. Untuk itu, digunakan Pengontrol PID yang dikenal mudah diimplementasikan di berbagai sistem. Tantangan utama yang sering dibahas pada kontrol motor DC menggunakan PID adalah penyesuaian parameter yaitu penentuan nilai parameter Penguatan Proporsional (Kp), Penguatan Integral (Ki), dan Penguatan Derivatif (Kd) untuk memperoleh kinerja sistem yang optimal [4].
Motor DC banyak digunakan pada sistem robot lengan di industri manufaktur untuk membantu perusahaan meningkatkan tingkat produksinya. Namun, kekhawatiran terbesar dalam lengan robot adalah keakuratan robot dalam mengangkat suatu objek, yang bergantung pada pengontrol yang dirancang [5]. Pengontrol PID merupakan pilihan terbaik untuk pengoperasian lengan robot karena memungkinkan modifikasi parameter dinamis untuk pelacakan lintasan yang tepat pada pergerakan lengan robot industri [6]. Kesulitan dalam penggunaan pengontrol ini adalah pada penalaan parameter kontrol karena masih menggunakan metode trial and error untuk mencari konstanta parameter PID yaitu Kp, Ki, dan Kd. Pengontrol PID untuk kontrol robot perlu didesain untuk mengurangi kesalahan tunak sehingga meningkatkan akurasi dan presisi [7],[10],[12],[14], juga untuk meningkatkan kecepatan respon serta meminimumkan overshoot [8]. Terdapat berbagai upaya penalaan parameter PID pada motor DC, antara lain metode Particle Swarm Optimization (PSO) [4]. Metode optimasi algoritma genetika (GA) diimplementasikan untuk menyetel parameter penguatan pengendali orde fraksional FO-PID dan PID [11], [16] Metode Ziegler-Nichols bertujuan untuk mengoptimalkan parameter pengontrol PID, termasuk penguatan proporsional, integral, dan turunan [13]. Pengoptimal keseimbangan
Lengan robot digunakan untuk meniru gerakan torsional, yang diperlukan untuk tugas sehari-hari seperti membuka pintu atau mengambil benda, yang biasa dilakukan oleh lengan bawah manusia[15]. Lengan robot dirancang untuk berputar pada bagian dasar, serta mengangkat atau menurunkan lengan. Pada robot pneumatik, gerakan berputar pada bagian alas menggunakan aktuator motor listrik, sedangkan pergerakan lengan menggunakan aktuator pneumatik [19]. Robot pneumatic menggunakan tekanan udara masukan dan koordinat akhir, dan keakuratan model dapat diverifikasi melalui eksperimen [20].
sebagai teknik optimasi yang efektif untuk penyetelan parameter pengontrol PID yang optimal [17].
Penelitian ini membahas lengan robot yang berfungsi mengangkat anak timbangan dan meletakkannya ke timbangan elektronik, sebagai alat bantu dalam proses kalibrasi timbangan elektronik. Untuk mengangkat anak timbangan, digunakan mekanisme vakum pada ujung lengan robot. Untuk menggerakkan lengan robot, digunakan penggerak pneumatik, dan untuk memutar bagian alas robot digunakan motor listrik. Penelitian ini fokus pada optimasi penalaan parameter kontrol PID untuk kecepatan putar motor DC sebagai pemutar bagian alas lengan robot agar dihasilkan kesalahan tunak yang rendah, juga osilasi yang rendah.
2 Metode
Mekanisme umpan balik digunakan dalam sistem kontrol robot lengan pneumatik untuk mengangkat beban. Penggunaan lengan robot ini banyak digunakan dalam kontrol industri dengan menghitung nilai 'kesalahan' sebagai selisih antara posisi lengan yang terukur dengan posisi lengan yang diinginkan. Pengpntrol akan berusaha meminimalkan kesalahan dengan mengatur nilai masukan kontrol pada aktuator. Diagram alir pengontrol PID ditunjukkan pada Gambar 1.
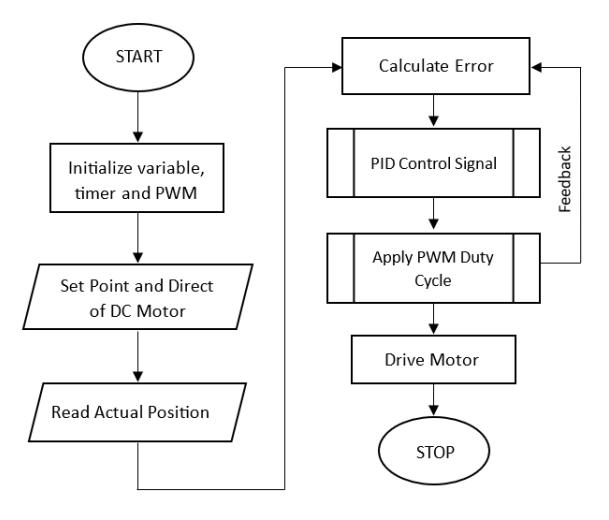
Gambar 1. Flowchart perhitungan pengontrol PID.
Perancangan pengontrol PID pada robot lengan untuk mengangkat anak timbangan dapat dihitung dengan menggunakan persamaan PID untuk mendapatkan sinyal kontrol untuk motor DC yaitu:
\[u(t) = K_p e(t) + K_i \int_0^t e(\tau) d\tau + K_d \frac{de(t)}{dt}\] (1)
Dari persamaan 1, e(t) adalah selisih nilai kesalahan posisi antara sudut yang diinginkan (set point) dengan sudut keluaran terukur, u(t) adalah sinyal PWM untuk motor DC dan y(t) adalah sudut sebenarnya. Nilai Kp, Ki, dan Kd merupakan nilai Penguatan Proporsional, Integral, dan Diferensial dari pengontrol PID yang digunakan.
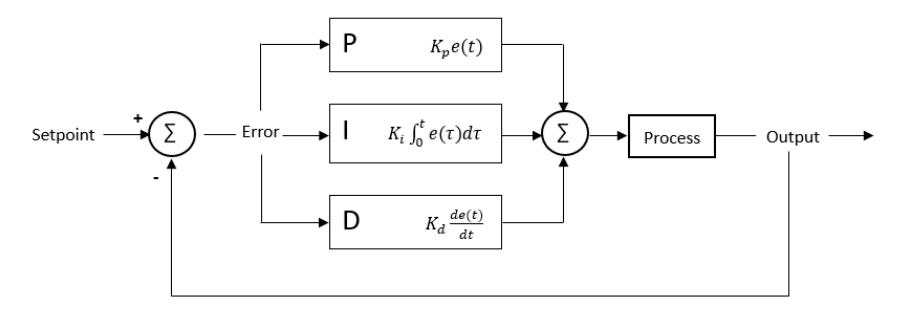
Gambar 2. Kontrol posisi loop tertutup motor DC menggunakan kontroler PID
Diagram pada Gambar 2 menunjukkan bahwa Penguatan Proporsional (Kp) merupakan pengali kesalahan (error) secara proporsional. Meski proses memiliki error yang signifikan, namun posisi motor akan terkompensasi cukup besar. Penguatan Integral (Ki) merupakan pengali bagi akumulasi kesalahan, sehingga efeknya dapat menghilangkan kesalahan tunak. Penguatan Derivatif (Kd) merupakan pengali laju perubahan kesalahan, sehingga efeknya memperkecil simpangan posisi maksimum (overshoot). Total aksi PID akan dikonversi menjadi sinyal PWM untuk mengaktifkan motor DC yang selanjutnya menggerakkan lengan robot [18].
3 Hasil dan Diskusi
Robot lengan pada penelitian ini ditunjukkan pada Gambar 3. Bagian-bagian robot ini adalah Robot arm frame, solenoid circuit box, electronic circuit box, weights base dan electronic scales. Pada rangka robot terdapat motor DC, katrol, sabuk, dan bantalan yang memutar bagian alas robot. Silinder pneumatik berfungsi sebagai aktuator gerakan naik-turun lengan robot. Ejektor vakum ditempatkan pada end effector untuk mengaktifkan penghisap vakum yang menghisap dan mengangkat anak timbangan. Robot selanjutnya bergerak dengan tiga derajat kebebasan (berputar pada landasan, mengangkat lengan dan pergelangan) untuk memindahkan anak timbangan dari weight base ke electronic scales.
Gambar 3. Robot motor DC pneumatik pengangkat anak timbangan.
Komponen motor DC dan pneumatik pada lengan robot meliputi: Soket AC IES320 C14, Konverter AC-DC WX-DC212, DC step down LM2596, Arduino Uno, Modul Joystick KY-023, Driver Motor L298N, Motor DC JGY-370, Modul relay 4 channel, katup solenoid 5/3 arah, katup solenoid 2/2 arah, dan saklar E-TEN112.1. Skema hubungan seluruh komponen tersebut ditunjukkan pada Gambar 4.
Gambar 4. Rangkaian robot motor DC – pneumatik.
Komponen sistem pneumatik yang diimplementasikan pada robot ini adalah kompresor, air service unit, katup pengurang tekanan variabel, katup pengatur arah 5/3 arah, katup kontrol 2/2 arah, katup pengatur aliran satu arah, silinder kerja ganda, ejektor vakum, dan penghisap vakum yang ditunjukkan pada Gambar 5. Kompresor berfungsi sebagai penyedia udara tekan untuk keseluruhan sistem, Air Service Unit berfungsi sebagai alat yang menyiapkan, mengatur dan menjaga kualitas udara tekan pada kompresor. Variable Pressure Reducing Valve berfungsi untuk menurunkan tekanan udara yang diberikan kompresor. Katup solenoid 5/3 arah berfungsi sebagai pengatur aliran udara untuk menggerakkan silinder pneumatik yang mengatur pergerakan lengan robot. Katup solenoid 2/2 arah berfungsi sebagai pengatur aliran udara untuk ejektor vakum, Katup pengatur aliran satu arah sebagai pengatur kecepatan gerak lengan robot dengan cara mengendalikan aliran udara yang masuk ke dalam silinder pneumatik, Silinder Kerja Ganda merupakan silinder pneumatik yang berfungsi untuk menggerakan lengan robot ke depan dan ke belakang, Ejektor vakum berfungsi untuk mengubah tekanan positif dari kompresor menjadi tekanan vakum yang diperlukan penghisapan vakum.
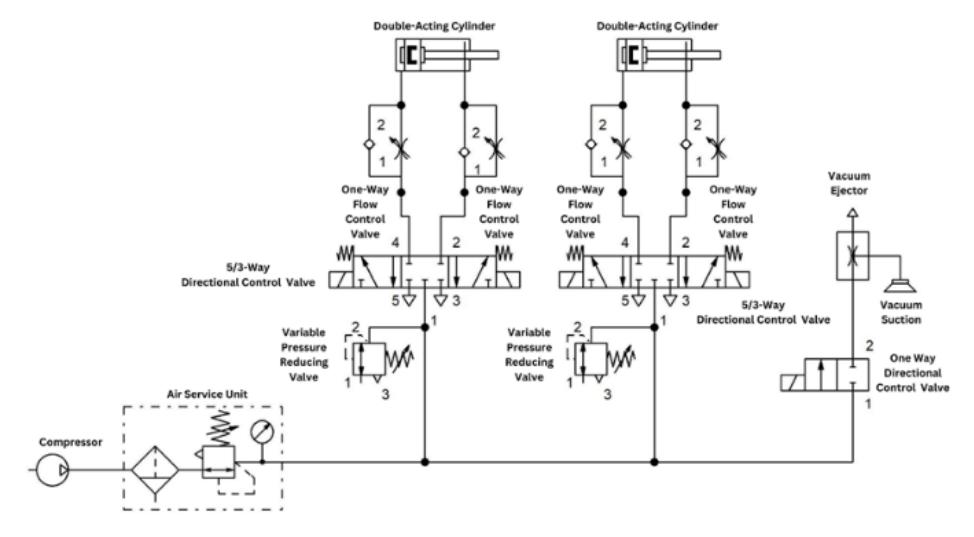
Gambar 5. Skema sistem pneumatik.
Untuk pergerakan bagian alas robot, motor DC yang digunakan telah terintegrasi dengan sensor encoder. Sensor ini akan mengirimkan sinyal perputaran bagian alas robot ke mikroprosesor untuk perhitungan aksi kontrol PID.
Untuk pergerakan naik turun lengan robot, joystick akan memberi masukan pada relay untuk membuka dan menutup katup solenoid 5/3 arah yang mengatur masuknya udara ke penggerak lengan robot. Ketika katup solenoid diberi input, maka udara yang tersedia pada kompresor akan dialirkan ke katup solenoid, kemudian udara tersebut diteruskan ke aktuator pneumatik. Aktuator pneumatik pada lengan robot prototipe ini terdiri dari silinder pneumatik hasta, silinder pneumatik pergelangan, dan ejektor vakum. Udara yang dilewatkan
pada silinder pneumatik hasta akan menggerakkan bagian hasta robot. Udara yang dilewatkan pada silinder pneumatik pergelangan akan menggerakkan bagian pergelangan robot.
Untuk penghisap vakum, saklar memberikan masukan untuk mengendalikan katup solenoid 2/2 arah. Pada saat yang sama, udara yang diteruskan ke ejektor vakum akan mengaktifkan penghisap vakum untuk menghisap dan mengangkat anak timbangan.
3.1 Penalaan Kontrol Proporsional
Pengujian kontrol PID bertujuan untuk mengontrol kecepatan motor DC agar mencapai nilai set point dengan stabil seperti ditunjukkan pada Gambar 6. Set point yang ditentukan untuk pengoperasian robot ini adalah 100 rpm. Rumus pengontrol PID diimplementasikan langsung dalam kode program pengujian penyetelan PID. Pengujian penalaan PID dilakukan dengan menggunakan waktu sampel 60 ms, dengan pengambilan 100 data untuk satu nilai konstanta pengontrol. Penalaan PID dilakukan dengan metode trial & error. Uji penalaan PID dilakukan secara bertahap dimulai dari penentuan nilai konstanta proporsional (Kp).
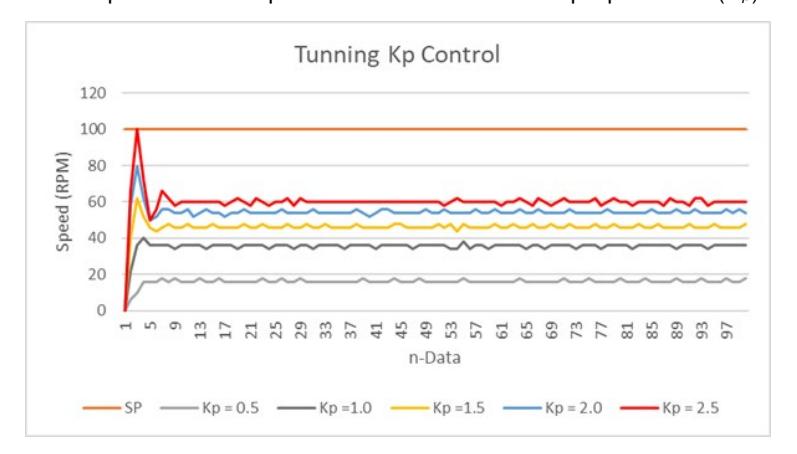
Gambar 6. Penalaan parameter kontrol proporsional Kp.
Nilai Kp yang cukup besar mempengaruhi penurunan nilai kesalahan tunak (steady state error), namun belum mampu mencapai nilai set point. Pada Kp = 2,5 diperoleh kesalahan tunak sebesar 40%. Namun osilasi menjadi sangat besar pada Kp = 2,5 yaitu 67%, sehingga settling time meningkat. Tabel 1 merangkum perbandingan ini. Karena nilai kesalahan tunak pada Kp = 2,5 lebih kecil dibandingkan nilai Kp lainnya, meskipun settling time meningkat, nilai Kp = 2,5 dipilih sebagai nilai Kp optimal.
Settling Time (n) Overshoot (%) Steady State Error (%) 0,5 0 0 6 0 82 1,0 0 0 6 11 64 1,5 0 0 7 19 52 2,0 0 0 7 48 46 2,5 0 0 9 67 40
Tabel 1. Respon Sistem Kontrol Proporsional
3.2 Penalaan Pengontrol Integral
Pada pengujian pengontrol PI dengan nilai Ki yang bervariasi, kecepatan motor DC sudah mencapai nilai set point, namun masih terdapat sedikit overshoot. Gambar 7 menunjukkan nilai Ki mampu menghilangkan kesalahan tunak hingga nol. Tabel 2 menunjukkan penalaan pengontrol integral dari Ki = 0,1 sampai Ki = 0,5. Pada nilai Ki = 0,5 dihasilkan settling time paling singkat, yaitu 17 x 60 ms = 1,02 s.
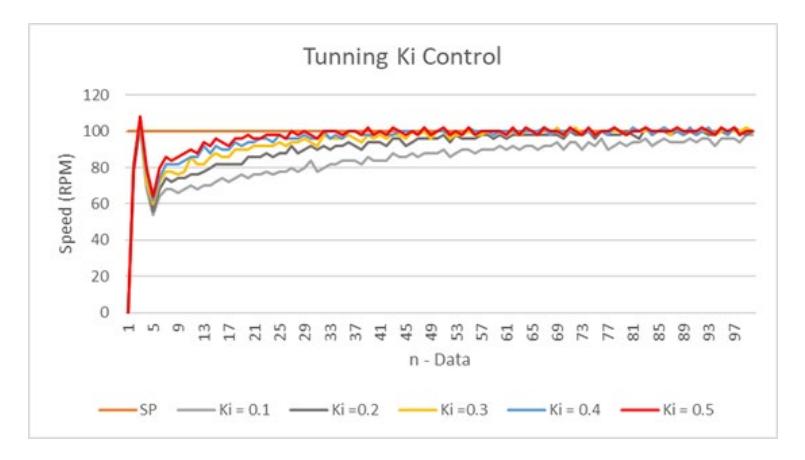
Gambar 7. Penalaan Parameter Kontrol Integral Ki.
Tabel 2. Respon Sistem Pengontrol Proporsional Integral
| 𝐾𝐾𝑝𝑝 | 𝐾𝐾𝑖𝑖 | 𝐾𝐾𝑑𝑑 | Settling Time (n) | Overshoot (%) | Steady State Error (%) |
|---|---|---|---|---|---|
| 2,5 | 0,1 | 0 | 97 | 2 | 5 |
| 2,5 | 0,2 | 0 | 33 | 4 | 0 |
| 2,5 | 0,3 | 0 | 29 | 6 | 0 |
| 2,5 | 0,4 | 0 | 21 | 6 | 0 |
| 2,5 | 0,5 | 0 | 17 | 8 | 0 |
3.3 Penalaan Pengontrol Derivatif
Pada pengujian kontrol derivatif, kecepatan motor DC mencapai set point dan overshoot lebih kecil, meskipun tidak ada perubahan rise time yang signifikan. Nilai Kd = 1,0 menghasilkan overshoot sebesar 4%. Sedangkan pada Kd = 1,5 diperoleh overshoot sebesar 2%. Kedua variasi Kd menghasilkan respon sistem yang sangat baik. Berdasarkan respon sistem yang diperoleh, Kd = 1,0 memungkinkan motor DC mencapai nilai set point dan keadaan tunak lebih cepat. Sedangkan Kd = 1,5 memungkinkan motor DC memperoleh overshoot yang lebih kecil.
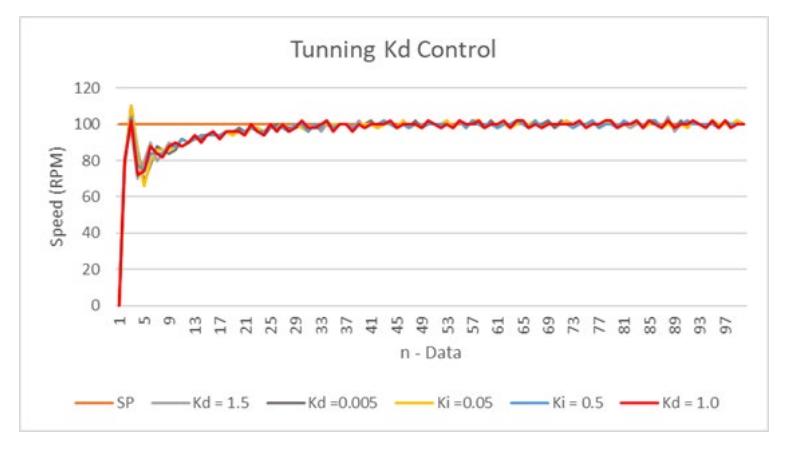
Gambar 8. Penalaan Parameter Kontrol Derivatif Kd.
Pada robot lengan, nilai overshoot yang kecil sangat disukai. Hal ini bertujuan agar pada saat memindahkan beban, pergerakan robot tidak agresif akibat overshoot yang tinggi pada motor DC. Dengan demikian nilai Kd yang digunakan pada pengontrol PID adalah 1,5. Berdasarkan hasil penalaan yang dirangkum pada Tabel 4, didapatkan nilai Kp sebesar 2,5, nilai Ki sebesar 0,5, dan nilai Kd sebesar 1,5.
Tabel 3. Respon Sistem Pengontrol Proporsional Integral Derivatif (PID)
| 𝐾𝐾𝑝𝑝 | 𝐾𝐾𝑖𝑖 | 𝐾𝐾𝑑𝑑 | Settling Time (n) | Overshoot (%) | Steady State Error (%) |
|---|---|---|---|---|---|
| 2,5 | 0,5 | 0,005 | 21 | 10 | 0 |
| 2,5 | 0,5 | 0,05 | 21 | 10 | 0 |
| 2,5 | 0,5 | 0,5 | 21 | 10 | 0 |
| 2,5 | 0,5 | 1,0 | 21 | 4 | 0 |
| 2,5 | 0,5 | 1,5 | 21 | 2 | 0 |
Apabila menggunakan penelitian Suseno dan Ma'arif [9] sebagai pembanding, proses penalaan yang menggunakan metode Genetic Algorithm menghasilkan dua pilihan nilai parameter kontrol yang menghasilkan overshoot sebesar 2% dan settling time sebesar 13,5. Nilai parameter PID untuk mutasi 1 adalah Kp = 3,75, Ki= 1,32, dan Kd = 0,21. Kemudian nilai parameter PID terbaik pada Crossover sebesar 0,4 yaitu Kp = 4.21, Ki = 1.20, dan Kd = 0.25, dengan nilai overshoot 2%, settling time = 1,08 s.
Pembanding lainnya adalah pengujian hardware pada penelitian Rahayu dkk [4], respon kecepatan motor yang stabil dihasilkan pada Kp = 1,46, Ki = 1,31, dan Kd = 0,80 adalah settling time sebesar 7.3 s dan overshoot sebesar 1% [4].
Penelitian ini menghasilkan kinerja yang setara pada Kp = 2,5, Ki = 0,5 dan Kd = 1,5, yang menghasilkan overshoot 2% dan settling time 21 x 60 ms = 1,26 s.
Kesimpulan
Hasil penalaan kontrol PID pada motor DC robot pengangkat anak timbangan menghasilkan respon kecepatan motor yang stabil dimana Kp = 2,5, Ki = 0,5, dan Kd = 1,5 dengan settling time sebesar 1,26 detik, overshoot sebesar 2%, dan kesalahan tunak sebesar 0%.
Ucapan Terima Kasih
Penulis mengucapkan terima kasih kepada semua pihak yang telah membantu penulisan makalah ini.