
1 Pendahuluan
Indonesia merupakan salah satu negara dengan tingkat aktivitas seismik tinggi karena berada pada pertemuan tiga lempeng tektonik utama, yaitu Indo-Australia, Eurasia, dan Pasifik. Kondisi ini menjadikan wilayah Indonesia rentan terhadap gempa bumi dengan frekuensi kejadian tinggi dan potensi dampak signifikan terhadap keselamatan masyarakat serta infrastruktur [1],[2]. Gempa disebabkan oleh panas inti bumi sehingga menyebabkan lempeng bumi bergeser, bertabrakan dengan lempeng lain, serta menimbulkan patahan di antara lempeng-lempeng tersebut [3]. Intensitymeter adalah alat yang digunakan untuk mengukur intensitas gempa bumi. Perangkat ini merupakan komponen vital dalam jaringan pemantauan gempa bumi kuat yang dikelola oleh BMKG [4]. Tingkat dampak gempa di suatu lokasi dinyatakan dalam skala Modified Mercalli Intensity (MMI), yang bersifat subjektif dan diklasifikasikan dari tingkat I hingga XII [5]. Skala ini
digunakan oleh BMKG untuk menyusun ShakeMap yang menunjukkan distribusi intensitas gempa di suatu wilayah.
Keterbatasan jumlah perangkat pemantauan yang merata di seluruh wilayah, khususnya di daerah terpencil, menjadi tantangan dalam upaya mitigasi. Peralatan seismik konvensional seperti seismograf dan akselerograf memerlukan biaya tinggi, infrastruktur khusus, dan proses kalibrasi yang kompleks [6]. Hal ini mendorong penggunaan sensor berbiaya rendah, seperti accelerometer berbasis MEMS, sebagai alternatif yang lebih fleksibel dan mudah diimplementasikan. Penelitian sebelumnya menunjukkan bahwa akselerograf berbasis MEMS berbiaya rendah dapat menjadi alternatif sensor konvensional, meskipun masih terdapat keterbatasan pada parameter tertentu [7]. Teknologi MEMS dapat menurunkan biaya dibandingkan sensor konvensional dan memungkinkan penerapan jaringan pemantauan yang lebih rapat, walaupun masih menghadapi tantangan berupa tingkat noise yang tinggi dan respon frekuensi rendah [8]. Salah satu sensor yang digunakan adalah MEMS WT61C, yaitu sensor enam sumbu yang mampu mendeteksi percepatan dan dilengkapi algoritma Kalman filter untuk mereduksi noise [9]. Kalman filter digunakan untuk mengurangi noise acak dan mengompensasi bias drift pada data sensor dengan menggabungkan model dinamika sistem dan hasil pengukuran secara iteratif [10],[11].
Dalam deteksi kejadian seismik, algoritma Short-Term Average/Long-Term Average (STA/LTA) merupakan metode yang banyak digunakan karena sederhana dan efektif dalam mengenali perubahan amplitudo sinyal sebagai indikator gempa [12],[13]. Selain itu, untuk memastikan informasi cepat sampai ke pengguna, diperlukan mekanisme diseminasi real-time seperti Telegram dan Short Message Service (SMS) yang dapat menjangkau wilayah dengan keterbatasan akses internet. SMS bekerja secara serial dan bergantung pada kekuatan sinyal seluler yang memungkinkan untuk mengirim dan menerima pesan antar pengguna. [14],[15].
Tujuan utama penelitian ini adalah merancang, mengimplementasikan, dan memvalidasi sebuah intensitymeter berbasis MEMS yang berbiaya rendah dengan fungsionalitas menyeluruh (end-to-end), meliputi akuisisi data, deteksi kejadian, estimasi intensitas, serta diseminasi peringatan multi-saluran. Perancangan dan pengembangan intensitymeter ini berbasis sensor MEMS WT61C dan Raspberry Pi 4 Model B dengan algoritma pendeteksi kejadian gempa menggunakan STA/LTA, serta sistem diseminasi informasi gempa melalui SMS dan Telegram. Sistem dirancang mendukung kondisi online dan offline dengan penyimpanan data lokal dan sinkronisasi otomatis ke server.
Keterbaruan penelitian ini meliputi integrasi dual-mode operasi, multi-saluran notifikasi, dan mekanisme storeand-forward. Kinerja sistem divalidasi melalui pengujian self-noise, tilt test, komparasi GNSS, serta uji lapangan menggunakan simulator gempa. Dengan desain yang sederhana, biaya rendah, serta dukungan multi-saluran notifikasi, sistem ini berpotensi untuk pengembangan dalam bidang earthquake early warning system (EEWS) serta menjadi solusi untuk memperluas jaringan pemantauan gempa, khususnya di wilayah minim infrastruktur.
2 Metode
Sistem intensitymeter ini dirancang dengan algoritma STA/LTA untuk mendeteksi kejadian gempa dan menghitung nilai PGA, serta mengintegrasikan komponen utama berupa sensor accelerometer MEMS WT61C, modul GNSS Ublox Neo-M8N, dan single board computer Raspberry Pi 4 Model B.
2.1 Landasan Teoretis
Penelitian ini menggunakan dua parameter utama dalam deteksi dan penilaian gempa bumi, yaitu Peak Ground Acceleration (PGA) dan algoritma Short-Term Average/Long-Term Average (STA/LTA). PGA merupakan percepatan maksimum tanah akibat gempa yang digunakan sebagai indikator kuantitatif untuk menilai potensi kerusakan bangunan. Nilai PGA dihitung dari komponen horizontal terbesar karena gaya lateral dari komponen horizontal memiliki dampak paling signifikan terhadap struktur bangunan [16]. Persamaan perhitungan PGA yang digunakan adalah:
\[PGA = max [|a_{NS}|, |a_{EW}|]\] (1)
Dengan | | dan | | adalah data akselerasi komponen utara-selatan dan timur-barat. Banyak persamaan telah dikembangkan untuk memprediksi PGA berdasarkan magnitudo, jarak, kondisi tanah, dan parameter lainnya [17]. Nilai PGA kemudian dikonversi menjadi intensitas skala Modified Mercalli Intensity (MMI) melalui relasi empiris [18], seperti yang digunakan oleh BMKG dan USGS. Tabel 1 menunjukkan hubungan antara nilai PGA dan intensitas gempa MMI yang digunakan BMKG. Satuan %g menyatakan percepatan relatif terhadap gravitasi bumi, dengan 1 g = 100 %g. Nilai percepatan ini selanjutnya digunakan dalam estimasi skala intensitas MMI melalui pemetaan PGA–MMI.
| Tahel 1 Hubungan PGA denga | an intensitas demna humi dalam | n skala MMI yang digunakan BMKG. |
| Tabel 1. Habangan i ah aeng | iii iiitteiisitas geiiipa baiiii aaiaii | i shala iviivii yarig algariahari biviiha. |
| Getaran Dirasakan | Tidak Terasa | Lemah | Ringan | Biasa | Kuat | Sangat Kuat | Parah | Sangat Parah | Ekstrem |
|---|---|---|---|---|---|---|---|---|---|
| Potensi Kerusakan | Tidak | Tidak | Tidak | Sangat Ringan | Ringan | Sedang | Sedang/ Berat | Berat | Sangat Berat |
| PGA (%g) | <0,05 | 0.3 | 2.8 | 6.2 | 12 | 22 | 40 | 75 | >139 |
| Instrumental Intensity | I | II - III | IV | V | VI | VII | VIII | IX | X+ |
Selain PGA, algoritma STA/LTA digunakan untuk mendeteksi terjadinya gempa. Algoritma ini membandingkan rata-rata amplitudo sinyal pada jendela waktu pendek (STA) dengan jendela waktu panjang (LTA). Peningkatan signifikan rasio STA terhadap LTA digunakan sebagai penanda awal kejadian gempa. Persamaan matematis metode STA/LTA adalah sebagai berikut:
\[STA = \frac{1}{N_S} + \sum_{i=1}^{N_S} |x_i| \tag{2}\]
\[LTA = \frac{1}{N_L} + \sum_{i=1}^{N_L} |x_i| \tag{3}\]
\[R = \frac{STA}{LTA} \tag{4}\]
Dengan \(N_S\) dan \(N_L\) adalah jumlah sampel pada jendela pendek dan panjang, serta \(|x_i|\) adalah amplitudo absolut sinyal ke-i. Jika rasio R melebihi ambang batas (trigger), sistem akan mendeteksi kejadian gempa, sedangkan jika R turun di bawah ambang batas detrigger, status sistem kembali normal [12],[13].
Selain metode di atas, penelitian ini juga memanfaatkan accelerometer MEMS WT61C. Sensor ini merupakan sensor enam sumbu yang dapat mengukur percepatan, kecepatan sudut, dan sudut kemiringan. WT61C memiliki ukuran kecil, konsumsi daya rendah, biaya relatif murah, serta dilengkapi Kalman filter internal. Kalman filter dapat digunakan untuk mengurangi noise dan memperbaiki estimasi data secara real-time [11]. Sensor MEMS WT61C mendukung pengaturan bandwidth antara 5–256 Hz dan sampling rate 0.2–200 Hz melalui konfigurasi software bawaan. Namun, respons frekuensi gain/phase tidak tersedia dalam datasheet resmi, sehingga karakteristik roll-off maupun distorsi fase hanya dapat diasumsikan berdasarkan spesifikasi pabrikan. Keterbatasan ini membuat interpretasi sinyal, perlu dilakukan dengan hati-hati
Tabel 2. Spesifikasi accelerometer MEMS WT61C.
| Parameter | Kondisi | Nilai |
| Range | ±16g | |
| Resolusi | ±16g | 0.0005 g/LSB (16bit) |
| RMS Noise | Bandwidth = 100Hz | 0.75 - 1 mg-rms |
| Static Zero Drift | Placed horizontally | ±20 - 40 mg |
| Temperature Drift | -40°C ~ +85°C | ±0.15 mg/°C |
| Bandwidth | 5 - 256 Hz | |
| Sampling Rate | 0.2 - 200Hz |
Gambar 1. Accelerometer MEMS WT61C.
2.2 Desain Sistem dan Alur Kerja
Sistem intensitymeter yang dikembangkan terdiri atas tiga komponen utama, yaitu akuisisi data dari sensor, pemrosesan untuk deteksi kejadian seismik, serta diseminasi dan penyimpanan data. Perangkat keras yang digunakan mencakup sensor accelerometer MEMS WT61C sebagai sumber data percepatan tiga sumbu, modul GNSS Ublox Neo-M8N untuk informasi waktu dan lokasi, serta Raspberry Pi 4 Model B sebagai inti pemrosesan. Accelerometer MEMS WT61C dikonfigurasi dengan bandwidth 20 Hz dan sampling rate 100 Hz, serta memiliki sensitivitas sebesar 0.0005 g/LSB.
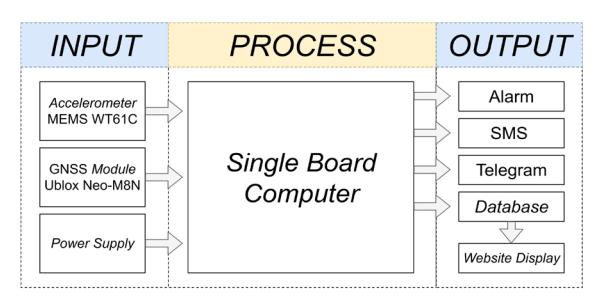
Gambar 2. Blok diagram sistem.
Data percepatan direkam kemudian dianalisis oleh Raspberry Pi menggunakan algoritma STA/LTA untuk mendeteksi event gempa bumi. Jika terjadi event gempa, sistem akan menghitung nilai PGA dan mengonversinya menjadi estimasi intensitas gempa dalam skala MMI. Informasi ini disajikan dalam bentuk grafik real-time melalui website, dan disebarkan melalui alarm buzzer, pesan SMS menggunakan SIM800L v2, serta notifikasi Telegram menggunakan Telegram Bot API.
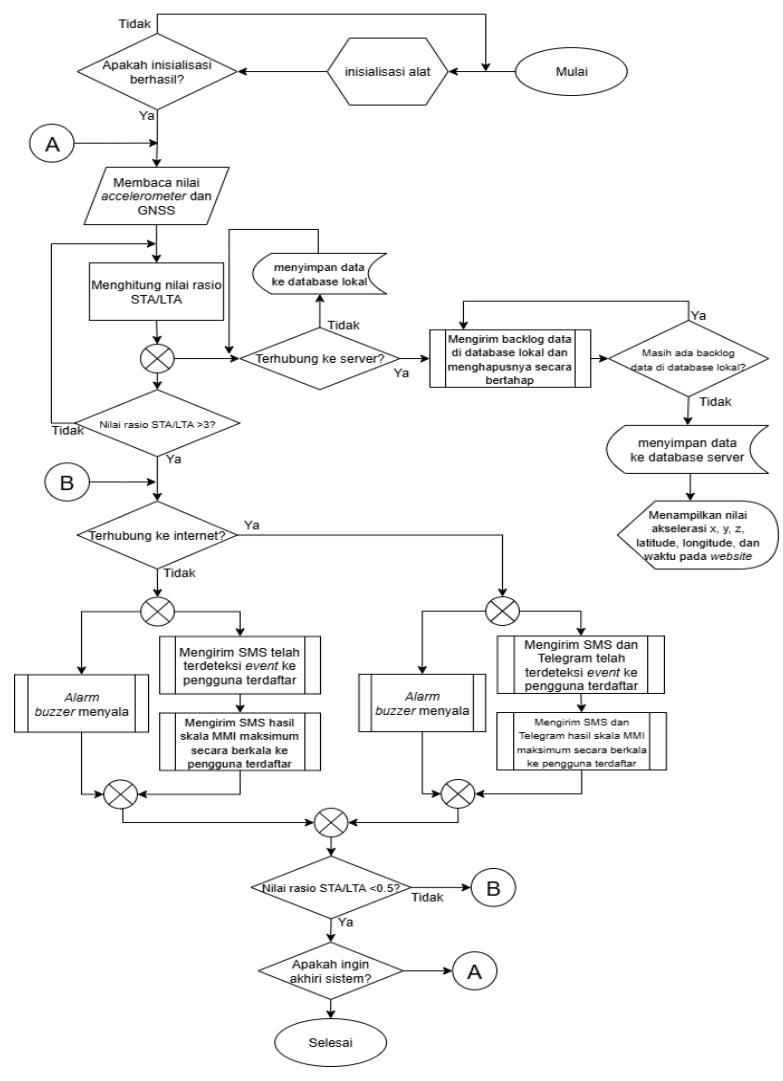
Gambar 3. Diagram alir sistem.
Sistem intensitymeter diawali dengan inisialisasi modul accelerometer MEMS WT61C dan GNSS Ublox Neo-M8N. Setelah inisialisasi berhasil, sistem membaca data percepatan dan posisi untuk menghitung rasio STA/LTA. Jika nilai STA/LTA melebihi ambang trigger, maka dianggap sebagai kejadian gempa. Data kemudian disimpan ke server, atau ke database lokal bila koneksi tidak tersedia, dan akan disinkronkan otomatis ketika koneksi kembali. Proses sinkronisasi dilakukan secara bertahap agar data tetap berurutan dan tidak ada yang hilang. Informasi hasil perhitungan ditampilkan melalui website. Saat gempa terdeteksi, sistem mengirim notifikasi berupa SMS saat kondisi offline atau SMS dan Telegram saat kondisi online serta menyalakan alarm buzzer. Selama getaran berlangsung, pembaruan nilai MMI maksimum dikirim berkala hingga rasio STA/LTA turun di bawah ambang detrigger, yang menandakan gempa berakhir.
Komponen-komponen seperti Raspberry Pi, MEMS WT61C, GNSS, SIM800L v2, relay, dan buzzer dirangkai dalam satu unit sistem. Catu daya utama berasal dari adaptor 15V 3A, sementara cadangan daya disediakan oleh baterai VRLA 12V 2.3Ah. Pengisian daya dikendalikan oleh Solar Charge Controller (SCC) yang juga mendistribusikan daya ke komponen melalui buck converter.
Gambar 4. Skematik diagram sistem.
Sensor MEMS dipasang dengan orientasi horizontal sesuai sumbu X, Y, dan Z, kemudian distabilkan menggunakan plat besi dan leveler agar posisi tetap rata serta meminimalkan pengaruh guncangan dari enclosure. Seluruh sistem ditempatkan dalam enclosure berbahan plastik jenis safety box yang kokoh dan tahan terhadap berbagai kondisi, sehingga mampu melindungi komponen dari debu, kelembaban, dan getaran mekanis eksternal. Untuk memastikan getaran tanah dapat tersalurkan dengan baik ke sensor, enclosure dipasang secara permanen menggunakan baut angkur, sehingga respons getaran yang direkam lebih merepresentasikan gerakan tanah sebenarnya.
Gambar 5. Desain enclosure.
2.3 Algoritma Deteksi Kejadian Gempa dan Sistem Peringatan
Proses deteksi kejadian pada penelitian ini menggunakan algoritma STA/LTA terhadap sinyal percepatan yang telah diatur dengan bandwidth 20 Hz, yang bisa diubah melalui software bawaan sensor. Parameter yang umum digunakan untuk deteksi gempa lokal adalah durasi STA 0,3–0,5 detik, LTA 30–60 detik, dengan rasio trigger 4–8 dan detrigger 2–3 [12]. Namun, penelitian ini menggunakan konfigurasi STA 1,5 detik, LTA 20 detik, dengan nilai trigger 3 dan detrigger 0,5, disertai sampling rate 100 Hz. Pemilihan parameter ini mempertimbangkan bahwa sensor MEMS WT61C memiliki sensitivitas lebih rendah dibandingkan peralatan seismometer operasional, sehingga diperlukan penyesuaian untuk meningkatkan keberhasilan dan mencegah kesalahan dalam mendeteksi gempa. Ketika nilai rasio STA/LTA melebihi ambang trigger, sistem mengidentifikasi adanya kejadian seismik dan mengubah status menjadi "bahaya". Pada saat itu, sistem
menghitung nilai PGA dari komponen horizontal dan mengonversinya ke skala MMI. Estimasi MMI ini digunakan untuk menentukan klasifikasi intensitas gempa serta potensi kerusakannya.
Sistem diseminasi pada sistem ini terdiri atas tiga jalur, yaitu alarm buzzer, SMS, dan Telegram. Ketika status "bahaya", buzzer akan berbunyi sebagai peringatan langsung, dan mati 10 detik setelah status kembali "aman". Untuk notifikasi, sistem mengirim dua jenis pesan, pertama saat status "bahaya" aktif, dan pesan pembaruan berkala jika PGA meningkat. SMS dikirim melalui modul SIM800L v2 secara serial, sedangkan Telegram dikirim melalui Bot API secara paralel. Daftar nomor telepon dan chat ID pengguna disinkronkan saat koneksi tersedia.

Gambar 6. Diagram alir sistem peringatan.
2.4 Penyimpanan dan Sinkronisasi Data
Sistem dirancang untuk beroperasi baik secara online maupun offline, dengan dukungan mekanisme penyimpanan lokal dan sinkronisasi otomatis ke server. Saat terhubung ke server, data hasil pembacaan alat dikirim secara langsung ke server melalui REST API. Data ini kemudian disimpan dalam basis data MySQL dan ditampilkan melalui antarmuka website.
Jika perangkat tidak terhubung ke server, data akan disimpan terlebih dahulu di database lokal (MariaDB) pada Raspberry Pi. Proses sinkronisasi ke server dilakukan secara otomatis saat koneksi kembali tersedia, menggunakan metode store-and-forward. Sistem mendahulukan pengiriman data yang tertunda secara berurutan, untuk memastikan tidak ada data yang hilang dan teracak. Metode ini digunakan agar tidak ada data yang hilang baik saat online maupun offline.
2.5 Metode Pengujian Sistem
Pengujian dilakukan untuk memastikan sistem intensitymeter berfungsi dalam berbagai kondisi operasional. Sistem diuji dalam mode online, di mana data dikirim ke server dan ditampilkan secara real-time melalui website. Lalu dalam mode offline, di mana data disimpan ke database lokal dan disinkronkan otomatis saat koneksi tersedia kembali. Output sistem juga diuji untuk mengevaluasi respons sistem terhadap kejadian seismik secara end-to-end, mulai dari deteksi hingga diseminasi.
2.5.1 Pengujian Self-Noise
Uji self-noise dilakukan pada malam hari selama 1 jam untuk meminimalisir gangguan lingkungan. Data percepatan yang direkam dengan sampling rate 100 sampel/detik, diubah menjadi spektrum frekuensi menggunakan metode Welch. Hasil spektrum dibandingkan dengan kurva New High Noise Model (NHNM), New Low Noise Model (NLNM), serta spektrum gempa ML 4 [19]. Analisis ini bertujuan mengevaluasi tingkat self-noise sensor MEMS WT61C dan membandingkannya dengan standar referensi instrumen seismik.
2.5.2 Pengujian Tilt Test dan Komparasi Modul GNSS
Tilt test dilakukan dengan pendampingan langsung dari pegawai BMKG untuk memvalidasi respons amplitudo dan arah dari sensor MEMS WT61C terhadap percepatan gravitasi. Sensor ditempatkan pada tilt meter, kemudian dimiringkan secara bertahap pada tiga sumbu koordinat X, Y, dan Z hingga mencapai kondisi ±1 g. Setiap posisi kemiringan dipertahankan selama 10 detik dengan sampling rate 100 sampel/detik. Hasil pengukuran kemudian dibandingkan terhadap nilai acuan untuk mengevaluasi linearitas terhadap arah gaya gravitasi. Metode tilt test ini umum digunakan dalam pengujian accelerometer operasional.
Untuk menguji akurasi sensor dalam penentuan lokasi dan sinkronisasi waktu, dilakukan validasi modul GNSS dengan cara membandingkan data hasil pencatatan 10 sampel dari sensor MEMS WT61C terhadap peralatan GPS referensi. Parameter yang dianalisis meliputi selisih waktu (Δt) dan perbedaan posisi spasial (Δs).
2.5.3 Uji Lapangan dengan Simulator Gempa
Pengujian lapangan dilakukan menggunakan simulator gempa milik BMKG Pusat. Pemanfaatan simulator dipilih karena kejadian gempa bumi tidak dapat diprediksi secara pasti, sehingga sulit menunggu peristiwa nyata dalam rentang waktu penelitian. Uji ini dilakukan sebanyak dua kali dengan menggunakan rekaman gempa Lombok 2018 (M7,0). Pada pengujian pertama, sumber gempa dimodelkan dalam kondisi lebih jauh dari lokasi sensor, sedangkan pada pengujian kedua jarak sumber lebih dekat. Tujuan uji ini adalah untuk
menilai kinerja sistem secara menyeluruh mulai dari tahap akuisisi sinyal, deteksi kejadian gempa menggunakan metode STA/LTA, perhitungan parameter seismik, hingga tahap diseminasi informasi melalui SMS, Telegram, dan alarm buzzer peringatan.
3 Hasil dan Diskusi
Bagian ini menyajikan hasil implementasi, pengujian, dan hasil sistem intensitymeter yang telah dikembangkan. Setiap hasil dianalisis untuk menilai bahwa sistem dapat bekerja sebagaimana mestinya.
3.1 Implementasi Sistem
Perangkat intensitymeter diimplementasikan sebagai sistem pemantauan gempa. Seluruh komponen dirakit dalam satu enclosure box tahan guncangan. Sensor diposisikan horizontal dengan petunjuk arah peletakan di bagian atas. Catu daya berasal dari adaptor 15V dan baterai cadangan 12V yang dikendalikan oleh SCC.
Gambar 7. Implementasi sistem dari bagian depan (a), atas (b), kiri (c), kanan (d), dan dalam (e).
Sistem dilengkapi dengan antarmuka website yang menampilkan informasi kejadian secara real-time, termasuk nilai PGA, nilai MMI, dan grafik pembacaan sensor. Website ini juga terdapat menu Download Data untuk mengunduh hasil pengukuran dalam format CSV dan MiniSEED.
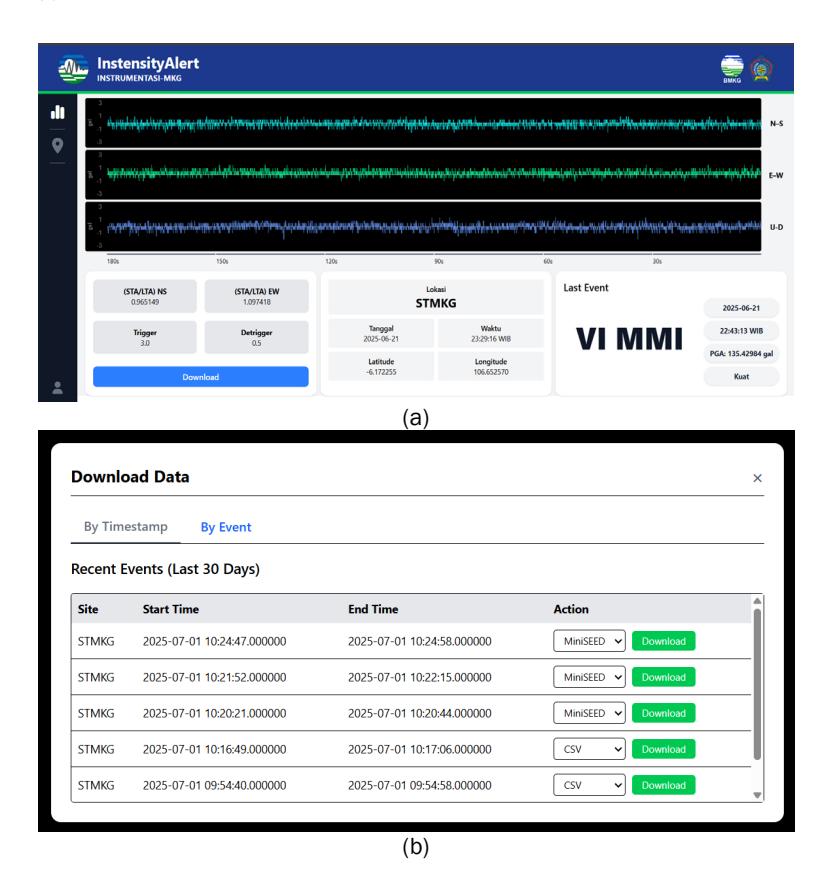
Gambar 8. Tampilan utama website (a) dan menu download data (b).
3.2 Evaluasi Kondisi Online dan Offline
Sistem diuji dalam dua kondisi operasional. Pada kondisi online, data kejadian dikirim secara real-time ke server melalui API, disimpan di database MySQL, dan ditampilkan langsung di antarmuka website. Pada kondisi offline, data disimpan sementara di database lokal (MariaDB) pada Raspberry Pi. Saat koneksi kembali tersedia, sistem melakukan sinkronisasi otomatis ke server menggunakan metode store-and-forward secara berurutan. Seluruh data berhasil tersinkron tanpa kehilangan atau duplikasi.
(a) (b)
Gambar 9. Log pengiriman data saat offline (a) dan saat kembali online (b).
3.3 Verifikasi Sistem Peringatan
Pengujian sistem peringatan dilakukan untuk memastikan sistem dapat mengirimkan peringatan. Alarm buzzer menyala setelah status "bahaya" terdeteksi dan berhenti 10 detik setelah status kembali "aman". Notifikasi SMS berhasil dikirim melalui SIM800L v2 ke seluruh nomor pengguna, baik untuk pesan awal maupun pembaruan. Notifikasi Telegram dikirim melalui Bot API. SMS dikirim secara serial dengan latensi 5–7 detik tergantung kualitas sinyal, sedangkan Telegram dikirim paralel secara real-time. Seluruh pesan diterima pengguna dan sesuai struktur rancangan.
(a) (b)
Gambar 10. Notifikasi SMS dan Telegram.
3.4 Validasi Umum Sistem
Sebelum digunakan secara menyeluruh, perangkat telah melalui pengujian dasar untuk memastikan stabilitas dan keandalan sistem. Pengujian mencakup self-noise untuk memastikan bahwa noise sensor tidak lebih besar dari sinyal gempa lokal, dan tilt test pada accelerometer MEMS WT61C untuk mendapat G-offset guna memastikan sensor mampu merekam perubahan orientasi dengan konsisten.
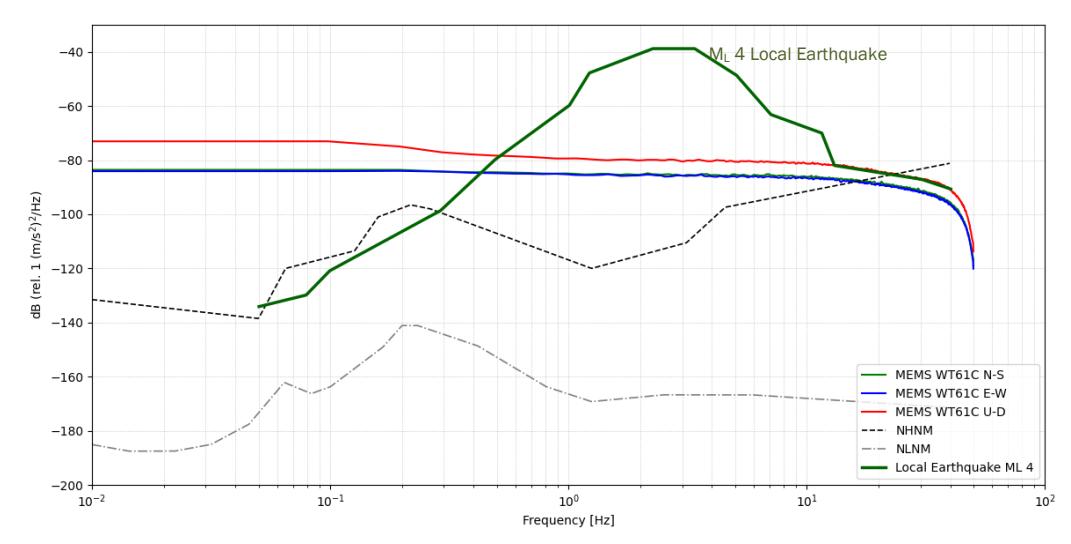
Gambar 11. Grafik perbandingan spektrum self-noise WT61C dengan sinyal gempa lokal 4 ML.
Grafik ini memperlihatkan perbandingan Power Spectral Density (PSD) sinyal self-noise hasil rekaman sensor MEMS WT61C pada tiga komponen dengan model noise seismik global New High Noise Model (NHNM) dan New Low Noise Model (NLNM) yang digunakan secara internasional sebagai standar acuan self-noise peralatan seismik serta kurva spektrum gempa ML 4. Terlihat bahwa tingkat self-noise dari sensor MEMS WT61C pada sebagian besar rentang frekuensi berada di luar cakupan kurva NHNM dan NLNM, menandakan bahwa performa noise instrumen belum sebaik peralatan seismik standar. Namun, kurva PSD dari gempa lokal ML 4 memiliki amplitudo yang jauh lebih tinggi dibandingkan tingkat kebisingan instrumen sehingga puncak atau peak sinyal gempa tetap dapat terekam dengan jelas. Hal ini menunjukkan bahwa meskipun karakteristik self-noise sensor tidak sepenuhnya berada di dalam standar NHNM dan NLNM, sensor WT61C masih dapat digunakan untuk mendeteksi gempa lokal ML 4 dan memperoleh parameter nilai Peak Ground Acceleration (PGA).
Tabel 3. Hasil tilt test MEMS WT61C.
| Sumbu | Orientasi | Percepatan rata-rata (g) | G-offset rata-rata (g) | Error rata-rata (%) | RMSE (g) |
|---|---|---|---|---|---|
| +1g | +1.0091 | -0.0091 | 0.91% | 0.009075748 | |
| X | –1g | -0.9877 | -0.0123 | 1.23% | 0.012252606 |
| +1g | +0.99067 | +0.00933 | 0.93% | 0.009334691 | |
| Y | –1g | -1.00619 | +0.00619 | 0.62% | 0.006208548 |
| +1g | +0.9997 | +0.0003 | 0.03% | 0.000547494 | |
| Z | –1g | -0.9961 | -0.0039 | 0.39% | 0.003883632 |
Hasil pengujian tilt test menunjukkan bahwa rata-rata G-offset pada ketiga sumbu berada pada kisaran ±0,01 g. Jika dihitung sebagai persentase error terhadap nilai acuan ±1 g, error maksimum tercatat sekitar 1,23% pada sumbu X (–1 g), sedangkan error minimum sekitar 0,03% pada sumbu Z (+1 g). Nilai RMSE keseluruhan juga relatif kecil (<0,013 g), sehingga masih berada dalam batas toleransi. Hal ini membuktikan bahwa sensor MEMS WT61C bekerja dalam kisaran normal dan mampu merespons perubahan orientasi dengan baik.
Sistem juga diuji untuk akurasi waktu dan lokasi dengan membandingkan modul GNSS Ublox Neo-M8N terhadap perangkat GPS Nanometric operasional sebagai GPS referensi.
Tabel 4. Hasil komparasi modul GNSS Ublox Neo-M8N.
| GPS Referensi | Ublox Neo-M8N | Selisih(Δ) | Error | |
|---|---|---|---|---|
| Lokasi (Rata-rata) | ||||
| Latitude (°) | –6.156544 | –6.156460 | +0.000084 | 0.0084 % |
| Longitude (°) | 106.840954 | 106.840952 | –0.000002 | 0.0002 % |
| Deviasi maksimal | <10 m | |||
| Waktu UTC (Rata-rata) | ||||
| Tanggal | 03/06/2025 | 03/06/2025 | – | – |
| Waktu UTC | 03:02.00 | 03:02.00 | 00:00.00 | – |
| Deviasi maksimal | <1 detik |
Hasil menunjukkan perbedaan koordinat <10 meter dan deviasi waktu UTC <1 detik, yang dianggap cukup akurat sehingga sinkronisasi waktu dapat diandalkan untuk pencatatan data seismik. Namun untuk deviasi waktu, kemungkinan terdapat perbedaan beberapa milidetik yang tidak tercatat karena keterbatasan pembulatan.
Hasil menunjukkan bahwa sensor bekerja dalam kisaran normal dan sistem merespons perubahan input dengan baik. Hasil ini mengindikasikan bahwa perangkat dapat digunakan sebagai alat monitoring intensitas gempa lokal dengan frekuensi menengah hingga tinggi, karena sensor menunjukkan kestabilan, dan modul GNSS mampu memberikan akurasi waktu serta posisi yang memadai.
3.5 Pengujian Sistem
Untuk menguji kinerja sistem secara menyeluruh, dilakukan simulasi gempa menggunakan simulator gempa milik BMKG Pusat. Data masukan yang digunakan berasal dari peristiwa gempa Lombok pada 5 Agustus 2018 dengan magnitudo 7,0, berlokasi di 8,35° LS dan 116,47° BT pada kedalaman 15 km. Pengujian dilakukan dua kali dengan menggunakan data yang sama, namun dengan jarak yang berbeda dari sumber gempa. Percobaan pertama menggunakan jarak yang lebih jauh dibandingkan percobaan kedua, meskipun jarak pasti dari masing-masing skenario tidak diketahui. Hasil percobaan pertama menunjukkan nilai PGA sebesar 0,5704 g (57,04 %g). Pada percobaan kedua, sistem memperoleh nilai PGA sebesar 0,7495 g (74,95%g). Kedua percobaan ini menghasilkan nilai yang ekuivalen dengan intensitas MMI VIII. Hasil tersebut sejalan dengan data USGS yang mencatat nilai PGA maksimum sebesar 0,744 g untuk gempa Lombok 2018 [20], serta konsisten dengan klasifikasi intensitas MMI VIII pada ShakeMap BMKG [21].
Tabel 5. Hasil pengujian sistem dengan simulator gempa dengan data gempa Lombok 2018.
| Parameter | Data gempa Lombok 2018 | Hasil sistem Intensitymeter Percobaan 1 (lebih jauh dari sumber gempa) | Hasil sistem Intensitymeter Percobaan 2 (lebih dekat dari sumber gempa) |
|---|---|---|---|
| Lokasi gempa | Lombok, NTB | Simulator gempa data gempa Lombok 2018 | Simulator gempa data gempa Lombok 2018 |
| Skala Intensitas (MMI) | VIII (Parah) | VIII (Parah) | VIII (Parah) |
| Peak Ground Acceleration (PGA) | 0,744 g (74,4 %g) | 0,5704 g (57,04 %g) | 0,7495 g (74,95%g) |
| Error PGA | – | 23,3% | 0.8% |
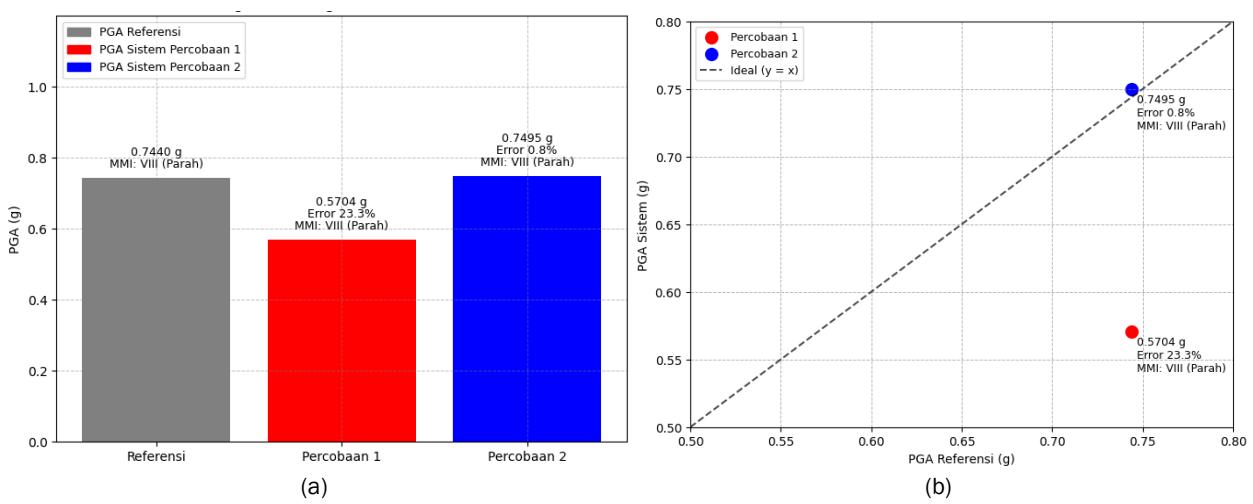
Gambar 12. Grafik diagram batang (a) dan scatter plot (b) perbandingan PGA referensi dengan sistem.
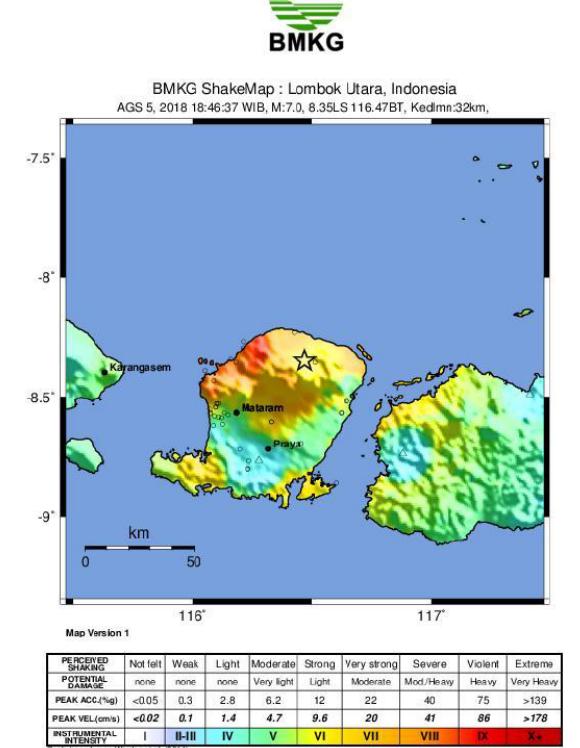
Gambar 13. ShakeMap Corrected gempa Lombok 5 Agustus 2018 [21]
Pada percobaan pertama diperoleh selisih sekitar 23,3%, sedangkan pada percobaan kedua sekitar 0,8% terhadap nilai PGA gempa Lombok 2018. Meskipun demikian, estimasi intensitas MMI dari sistem tetap konsisten dengan ShakeMap. Hal ini dapat disebabkan oleh beberapa faktor seperti noise internal pada sensor MEMS, keterbatasan akurasi simulator gempa yang tidak sepenuhnya mereplikasi spektrum getaran asli, serta perbedaan algoritma perhitungan. Simulasi gempa juga memiliki keterbatasan karena proses konversi sinyal, lokasi uji yang tidak identik dengan pusat gempa, dan skala getaran yang telah disesuaikan untuk tujuan edukasi, sehingga akurasi hasil dapat terpengaruh. Keterbatasan lain adalah sistem belum diuji pada berbagai kondisi tanah dan variasi magnitudo yang dapat memengaruhi amplifikasi PGA. Kesalahan estimasi intensitas MMI hingga ±1 tingkat masih dianggap sebagai toleransi yang wajar dan tidak signifikan, sehingga hasil sistem ini tetap dapat diterima untuk tujuan pemantauan intensitas gempa [22].
4 Kesimpulan
Penelitian ini berhasil merancang dan mengimplementasikan sistem intensitymeter berbasis sensor low-cost MEMS WT61C dengan algoritma deteksi kejadian gempa STA/LTA. Sistem dilengkapi mekanisme diseminasi multi-saluran (alarm buzzer, SMS, dan Telegram) serta mampu beroperasi dalam mode online maupun offline melalui metode store-and-forward, sehingga data tetap terjaga dan dapat diakses melalui website dengan fitur unduh data CSV dan MiniSEED. Hasil pengujian menunjukkan bahwa sistem mampu mendeteksi kejadian gempa lokal dengan frekuensi menengah hingga tinggi, menghitung nilai PGA, mengestimasi intensitas gempa dalam skala MMI, serta mengirimkan notifikasi secara real-time kepada pengguna.
Validasi sistem dilakukan melalui pengujian self-noise, tilt test, dan komparasi GNSS yang menunjukkan bahwa sensor bekerja dalam batas toleransi dengan tingkat akurasi yang memadai. Pada uji simulator gempa Lombok 2018 (M7,0), percobaan pertama menghasilkan nilai PGA 0,5704 g dengan selisih sekitar 23,3% terhadap data referensi (0,744 g), sedangkan percobaan kedua memperoleh 0,7495 g dengan selisih sekitar 0,8%. Meskipun terdapat perbedaan pada nilai PGA dari kedua percobaan, hasil konversi ke skala intensitas MMI menunjukkan tingkat VIII (Parah), yang sejalan dengan klasifikasi guncangan pada ShakeMap BMKG.
Kebaruan penelitian ini terletak pada sensor MEMS berbiaya rendah dengan dukungan operasi online dan offline, mekanisme store-and-forward, serta diseminasi peringatan multi-saluran secara real-time. Kontribusi utama sistem ini adalah menyediakan solusi pemantauan gempa yang sederhana, terjangkau, dan aplikatif untuk wilayah dengan keterbatasan infrastruktur, sekaligus mendukung pengembangan Earthquake Early Warning System (EEWS). Sistem ini dapat dikembangkan lebih lanjut melalui optimasi parameter algoritma STA/LTA, penerapan metode reduksi noise, serta integrasi ke jaringan sensor berbasis Internet of Things (IoT).
Keterbatasan penelitian ini adalah ketiadaan kurva respons gain/phase resmi dari WT61C, meskipun sensor mendukung variasi pengaturan bandwidth dan sampling rate melalui software bawaan. Selain itu, pengujian lapangan masih terbatas pada simulator gempa BMKG dengan data gempa Lombok 2018, tanpa uji pada berbagai kejadian gempa nyata di lokasi berbeda. Sistem juga belum diuji pada berbagai kondisi tanah dan variasi magnitudo, sehingga pengaruh site effect terhadap amplifikasi PGA belum terpenuhi. Dengan demikian, hasil penelitian ini bersifat generalisasi pada gempa nyata sehingga memerlukan studi lanjutan.
Ucapan Terima Kasih
Penulis mengucapkan terima kasih kepada Badan Meteorologi Klimatologi dan Geofisika (BMKG) atas dukungan fasilitas dan data yang diberikan, serta kepada seluruh pihak yang telah membantu pelaksanaan penelitian ini namun tidak dapat disebutkan satu per satu.