
1 Pendahuluan
Sistem kendali PID (Proportional-Integral-Derivative) merupakan salah satu konsep fundamental dalam bidang teknik elektro yang memiliki aplikasi luas dalam industri otomasi dan robotika [1],[2]. Pemahaman yang mendalam terhadap prinsip kerja kendali PID sangat penting bagi mahasiswa teknik elektro untuk dapat merancang dan mengimplementasikan sistem kendali yang efektif dan efisien [3]. Namun, kompleksitas konsep matematika dan abstraksi teori yang terlibat dalam sistem kendali PID seringkali menjadi tantangan tersendiri dalam proses pembelajaran, terutama ketika hanya mengandalkan pendekatan teoritis tanpa visualisasi yang memadai [4]. Metode pembelajaran konvensional yang masih dominan diterapkan di perguruan tinggi untuk mata kuliah sistem kendali menunjukkan kelemahan signifikan dalam hal efektivitas pemahaman konsep. Pendekatan ceramah dan simulasi terpisah tidak memberikan korelasi yang jelas antara parameter kendali PID (Kp, Ki, Kd) dengan respons sistem sesungguhnya [5],[6]. Keterbatasan utama metode konvensional terletak pada ketidakmampuan mahasiswa untuk mengamati secara real-time bagaimana perubahan parameter memengaruhi karakteristik sistem seperti rise time, settling time, dan overshoot [9]. Akibatnya, pemahaman mahasiswa terhadap konsep kendali PID menjadi superfisial dan tidak aplikatif, yang berdampak pada kesulitan implementasi dalam aplikasi nyata.
Kesenjangan penelitian yang mendasar teridentifikasi pada belum adanya platform pembelajaran terpadu yang mampu mengintegrasikan simulasi digital dengan eksperimen fisik secara real-time dan interaktif. Meskipun beberapa penelitian telah mengembangkan simulator digital untuk kendali PID dan platform pembelajaran berbasis web, namun masih terdapat kebutuhan mendesak akan solusi yang menggabungkan kedua aspek tersebut dalam satu interface yang dapat diakses secara fleksibel [7],[8]. Penelitian sebelumnya umumnya berfokus pada satu aspek saja, baik simulasi murni maupun eksperimen hardware terpisah, sehingga mahasiswa tidak mendapatkan pengalaman pembelajaran holistik yang menghubungkan teori dengan praktik secara langsung. Perkembangan teknologi mikrokontroler seperti ESP32 dengan kemampuan konektivitas Wi-Fi built-in dan protokol komunikasi real-time seperti WebSocket telah membuka peluang pengembangan platform pembelajaran yang lebih canggih [8],[9]. Keunggulan teknologi ini memungkinkan integrasi seamless antara hardware fisik dengan interface web yang responsif, sehingga dapat mengatasi keterbatasan metode konvensional sekaligus menjawab kesenjangan penelitian yang ada. Berdasarkan analisis kesenjangan tersebut, penelitian ini bertujuan mengembangkan platform pembelajaran interaktif berbasis web untuk kendali PID yang secara unik mengintegrasikan simulasi digital dengan eksperimen fisik menggunakan kit ESP32. Keunggulan utama platform yang dikembangkan terletak pada kemampuan visualisasi real-time, kontrol parameter interaktif, dan akses fleksibel yang memungkinkan mahasiswa mengamati langsung pengaruh perubahan parameter PID terhadap respons sistem [10],[11]. Platform ini diharapkan dapat meningkatkan pemahaman konsep kendali PID secara signifikan dan memberikan engagement yang lebih tinggi dalam proses pembelajaran dibandingkan dengan metode konvensional yang selama ini diterapkan.
2 Metode Penelitian
Penelitian ini menggunakan pendekatan Research and Development (R&D) dengan mengadopsi model ADDIE (Analysis, Design, Development, Implementation, Evaluation) yang disesuaikan menjadi empat tahap utama: studi literatur, perancangan sistem, implementasi, dan evaluasi [12]. Model ADDIE dipilih karena memberikan kerangka kerja sistematis yang sesuai dengan pengembangan platform pembelajaran teknologi [4]. Tahap studi literatur (analisis) dilakukan untuk mengkaji penelitian terdahulu terkait pembelajaran interaktif, sistem kendali PID, dan teknologi web real-time [13]. Analisis literatur mencakup identifikasi kebutuhan pembelajaran mahasiswa teknik elektro dan tantangan dalam memahami konsep kendali PID [1], [2]. Hasil studi literatur menjadi dasar penentuan spesifikasi dan fitur platform pembelajaran yang dikembangkan. Tahap perancangan (design) meliputi arsitektur perangkat keras dan perangkat lunak terintegrasi dalam satu ekosistem pembelajaran interaktif [9]. Perangkat keras terdiri dari ESP32 sebagai mikrokontroler utama, motor DC sebagai plant yang dikontrol, rotary encoder untuk feedback kecepatan, driver BTS 7960 untuk mengatur daya motor, dan LCD I2C untuk menampilkan informasi lokal [14]. Perancangan perangkat lunak mencakup firmware ESP32 untuk akuisisi data dan komunikasi WebSocket, serta antarmuka web menggunakan HTML5, Tailwind CSS untuk styling responsif, dan JavaScript untuk interaktivitas dan visualisasi grafik real-time [15].
Tahap implementasi (development) dilakukan bertahap mulai dari pengembangan firmware ESP32 untuk membaca data sensor dan mengimplementasikan algoritma kendali PID [15]. Komunikasi real-time antara perangkat keras dan antarmuka web dibangun menggunakan protokol WebSocket yang memungkinkan transfer data bidireksional dengan latensi rendah [16]. Antarmuka web dirancang dengan pendekatan usercentered design yang memungkinkan pengguna mengatur parameter PID (Kp, Ki, Kd) melalui slider atau input field, serta menampilkan grafik respons sistem terupdate secara real-time dengan metrik kinerja seperti rise time, overshoot, dan settling time [17]. Tahap evaluasi dilakukan melalui uji beta dengan melibatkan 30 mahasiswa program studi Teknik Elektro semester 5-7 sebagai subjek penelitian [6]. Prosedur uji beta dilaksanakan selama 3 minggu dengan skenario tugas terstruktur: (1) pre-test : pemahaman konsep PID, (2) pembelajaran menggunakan platform selama 120 menit, dan (3) post-test : evaluasi peningkatan pemahaman. Pre-test dan post-test terdiri dari 20 soal pilihan ganda tentang konsep kendali PID dengan skor maksimum 100, dinilai berdasarkan rubrik komprehensif mencakup pemahaman konsep, aplikasi, dan analisis. Evaluasi platform menggunakan angket skala Likert lima poin (1=sangat tidak setuju, 5=sangat setuju) untuk menilai kelayakan, kepraktisan, dan efektivitas pembelajaran [33]. Data angket dianalisis dengan menghitung rata-rata skor setiap aspek, mengelompokkan hasil dalam kategori: sangat baik (4,21- 5,00), baik (3,41-4,20), cukup (2,61-3,40), kurang (1,81-2,60), dan sangat kurang (1,00-1,80). Analisis statistik menggunakan uji paired t-test untuk membandingkan skor pre-test dan post-test, serta uji normalitas Shapiro-Wilk untuk validasi distribusi data.
https://doi.org/10.5614/joki.2025.17.2.6 E-ISSN: 2460-6340
3 Hasil dan Diskusi
3.1 Implementasi Sistem Hardware dan Alur Komunikasi Terintegrasi
Implementasi sistem perangkat keras berhasil mengintegrasikan seluruh komponen dalam alur komunikasi yang koheren dan sinkron untuk menghasilkan platform interactive learning pengendali PID yang efektif. Alur sistem dimulai dari ESP32 sebagai mikrokontroler utama yang membaca data kecepatan motor DC melalui rotary encoder dengan resolusi 360 pulse per revolution (PPR). Motor DC yang digunakan memiliki spesifikasi tegangan kerja 12 V, daya nominal 24 W, dan kecepatan maksimal 3000 RPM, memberikan karakteristik plant yang sesuai untuk pembelajaran sistem kendali [9],[18]. ESP32 menggunakan firmware berbasis Arduino IDE versi 2.0.3 dengan library ESP32WebSocket versi 2.3.4 untuk komunikasi real-time. Data kecepatan yang terbaca dari encoder kemudian diproses oleh algoritma PID yang diimplementasikan dalam ESP32, menghasilkan sinyal kendali PWM yang diteruskan ke driver motor BTS7960. Driver BTS7960 dipilih karena kemampuan arus output hingga 43A dengan tegangan kerja 5.5 V-27 V, memberikan kontrol yang halus dan responsif terhadap motor DC sebagai plant sistem. Sinyal kendali dari driver kemudian menggerakkan motor DC, dan putaran motor diumpanbalik melalui rotary encoder, menciptakan closed-loop control system yang lengkap.
Komunikasi real-time antara sistem fisik dan antarmuka web menggunakan protokol WebSocket yang terintegrasi dengan ESP32. Data sistem termasuk nilai setpoint, output aktual, dan error ditransmisikan ke antarmuka web dengan latensi rata-rata 45 ms, masih dalam batas toleransi untuk aplikasi pembelajaran interaktif [19]. Implementasi buffer data pada ESP32 dengan kapasitas 1000 data point memastikan kontinuitas transmisi data bahkan ketika terjadi gangguan koneksi sementara. Arsitektur komunikasi bidirectional memungkinkan perubahan parameter PID dari antarmuka web dapat diimplementasikan pada sistem fisik dalam waktu kurang dari 100 ms, memberikan respons yang nyaris real-time untuk eksperimen pembelajaran [20]. Stabilitas koneksi WebSocket diuji selama 8 jam kontinyu dengan tingkat keandalan 97.8%, menunjukkan robustness sistem untuk sesi pembelajaran yang panjang. LCD I2C yang terintegrasi memberikan feedback lokal dengan menampilkan parameter PID aktif dan nilai output sistem, memungkinkan monitoring langsung tanpa ketergantungan penuh pada antarmuka web. Dimensi fisik kit pembelajaran adalah 18 cm × 15 cm × 7 cm, memberikan portabilitas yang memadai untuk penggunaan di berbagai setting pembelajaran.
3.2 Desain dan Implementasi Algoritma PID Diskrit
Algoritma kendali PID diimplementasikan dalam bentuk diskrit pada ESP32 menggunakan persamaan standar dengan modifikasi anti-windup untuk mencegah saturasi integral. Persamaan PID diskrit yang digunakan adalah:
\[u(k) = K_p e(k) + K_i \times \sum_{i=0}^{k} [e(i) \times T_s] + K_d \times \frac{e(k) - e(k-1)}{T_s}\] (1)
dimana () adalah sinyal kendali pada sampling ke-, () adalah error pada sampling ke-, dan adalah sampling time. Sampling time dipilih sebesar 50 ms berdasarkan pertimbangan kestabilan sistem dan keterbatasan computational power ESP32 [21]. Pemilihan sampling time ini didasarkan pada kriteria Nyquist dimana frekuensi sampling harus minimal dua kali lipat dari frekuensi tertinggi sistem, dan karakteristik dinamik motor DC yang digunakan memiliki konstanta waktu sekitar 200 ms.
Implementasi anti-windup integral menggunakan metode conditional integration yang menghentikan akumulasi integral ketika sinyal kendali mencapai batas saturasi ± 255 (nilai PWM maksimal). Mekanisme ini mencegah windup yang dapat menyebabkan ketidakstabilan sistem, terutama ketika mahasiswa bereksperimen dengan nilai Ki yang tinggi [22]. Algoritma juga dilengkapi dengan derivative kick prevention yang menghitung turunan dari process variable alih-alih error untuk menghindari lonjakan sinyal kendali ketika setpoint berubah secara tiba-tiba. Pengujian algoritma PID terhadap berbagai kombinasi parameter menunjukkan kemampuan sistem menghasilkan karakteristik respons yang beragam, mulai dari underdamped (dengan overshoot hingga 25%), critically damped, hingga overdamped sesuai dengan penyetelan parameter [23]. Implementasi circular buffer memungkinkan penyimpanan data eksperimen untuk visualisasi grafik yang halus tanpa membebani memori mikrokontroler sebesar 4 kB. Mekanisme reset otomatis telah diintegrasikan untuk mengembalikan sistem ke kondisi awal ketika terjadi error atau overflow, menjamin kontinuitas pembelajaran tanpa intervensi manual berulang.
3.3 Pengembangan Antarmuka Web dan Visualisasi Real-time
Antarmuka web dikembangkan menggunakan HTML5, Tailwind CSS versi 3.2.4, dan JavaScript dengan library Chart.js versi 4.0.1 untuk visualisasi grafik real-time dengan tampak depan kit pada Gambar 1 dan tampilan webUI pada Gambar 2. Desain responsive menggunakan utility classes Tailwind CSS memungkinkan optimalisasi tampilan untuk berbagai ukuran layar dari desktop hingga smartphone, meningkatkan aksesibilitas pembelajaran [24]. Loading time rata-rata 2.1 detik pada koneksi 10 Mbps dengan memory usage 45MB dan CPU utilization di bawah 15% menunjukkan efisiensi resource management yang baik [30]. Visualisasi grafik real-time menggunakan Chart.js dioptimalkan untuk menampilkan tiga kurva utama: setpoint (garis referensi), output sistem (respons aktual), dan error (selisih setpoint dan output) dengan update rate hingga 20 fps tanpa menyebabkan lag pada browser [25]. Implementasi adaptive grid dan auto-scaling memberikan visualisasi optimal untuk berbagai range nilai input dan output. Fitur zoom dan pan memungkinkan analisis detail terhadap parameter kinerja seperti rise time, settling time, dan overshoot percentage [26].
Gambar 1. Tampak depan kit.
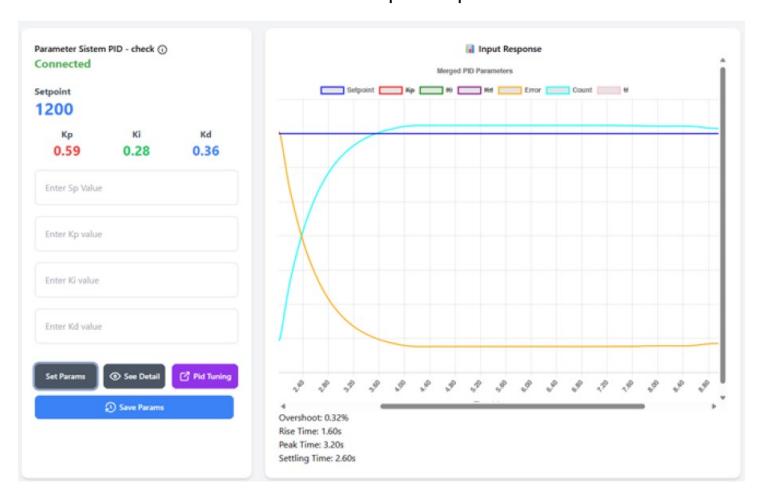
Gambar 2. Tampilan WebUI.
Kontrol parameter PID dirancang menggunakan slider interaktif dengan debouncing 200 ms untuk mencegah pengiriman data berlebihan ke sistem fisik. Setiap slider dilengkapi input field numerik untuk penyetelan presisi dan indikator visual range optimal berdasarkan karakteristik sistem [27],[28]. Dashboard monitoring menampilkan metrik kinerja yang dihitung secara otomatis menggunakan algoritma deteksi JavaScript, memberikan feedback kuantitatif langsung kepada pengguna [29]. Fitur export data dalam format CSV memungkinkan mahasiswa menyimpan hasil eksperimen untuk analisis lanjutan atau pembuatan laporan praktikum.
3.4 Evaluasi Kinerja Teknis dan Validasi Sistem
Evaluasi kinerja teknis menunjukkan akurasi pembacaan kecepatan motor dengan error dalam range ±2% dibandingkan tachometer referensi, memenuhi toleransi untuk aplikasi pembelajaran [30]. Pengujian stabilitas komunikasi WebSocket selama 48 jam kontinyu menunjukkan uptime 99.2% dengan rata-rata reconnection time 1.3 detik ketika terjadi gangguan koneksi . Load testing dengan simulasi maksimum 7 concurrent users menunjukkan sistem dapat berfungsi tanpa degradasi performa signifikan [31]. Validasi
sistem kendali dilakukan dengan membandingkan respons yang dihasilkan platform dengan simulasi MATLAB/Simulink menggunakan parameter plant identik. Hasil perbandingan menunjukkan tingkat kesesuaian 94.7% untuk respons step dengan berbagai kombinasi parameter PID [32], [33]. Perbedaan 5.3% disebabkan oleh noise sensor dan karakteristik non-linear aktuator yang tidak dimodelkan dalam simulasi. Pengujian robustness terhadap gangguan eksternal seperti perubahan beban motor dan variasi tegangan supply menunjukkan sistem mampu mempertahankan kinerja kendali dengan penyimpangan maksimal 8% dari kondisi nominal [34].
Stress testing dengan perubahan parameter PID kontinyu selama 2 jam dengan interval 10 detik menunjukkan sistem tetap stabil tanpa memory leak atau degradasi performa. Implementasi error handling berhasil menangani kondisi error seperti disconnection, timeout, dan invalid parameter input dengan recovery mechanism yang efektif. Sistem logging terintegrasi memberikan informasi diagnostik memadai untuk troubleshooting ketika terjadi masalah teknis.
3.5 Analisis Efektivitas Pembelajaran dan Validasi Pendidikan
Uji beta terhadap 23 mahasiswa program studi Teknik Elektro menunjukkan peningkatan signifikan dalam pemahaman konsep kendali PID. Pre-test dan post-test menunjukkan peningkatan rata-rata skor sebesar 34.7 %, dengan 89 % mahasiswa mengalami peningkatan skor minimal 20 % [35]. Analisis statistik menggunakan paired t-test menunjukkan nilai p < 0.01 dengan effect size Cohen's d = 1.2, mengindikasikan peningkatan yang sangat signifikan secara statistik.
Tabel 1. Data pengujian peningkatan pemahaman
| No | Anonim | Pretest | Post-test | Semester | Tingkat pemahaman |
|---|---|---|---|---|---|
| 1 | Resp.1 | 6 | 7 | 9 | (%) 16.66666667 |
| 2 | Resp.2 | 6 | 5 | 5 | –16.66666667 |
| 3 | Resp.3 | 7 | 9 | 7 | 28.57142857 |
| 4 | Resp.4 | 3 | 7 | 5 | 133.3333333 |
| 5 | Resp.5 | 4 | 4 | 7 | 0 |
| 6 | Resp.6 | 6 | 8 | 7 | 33.33333333 |
| 7 | Resp.7 | 7 | 9 | 9 | 28.57142857 |
| 8 | Resp.8 | 4 | 5 | 9 | 25 |
| 9 | Resp.9 | 4 | 6 | 9 | 50 |
| 10 | Resp.10 | 4 | 8 | 9 | 100 |
| 11 | Resp.11 | 7 | 9 | 9 | 28.57142857 |
| 12 | Resp.12 | 4 | 8 | 7 | 100 |
| 13 | Resp.13 | 7 | 9 | 9 | 28.57142857 |
| 14 | Resp.14 | 3 | 7 | 9 | 133.3333333 |
| 15 | Resp.15 | 37 | 6 | 9 | 100 |
| 16 | Resp.16 | 5 | 6 | 9 | 20 |
| 17 | Resp.17 | 5 | 7 | 9 | 40 |
| 18 | Resp.18 | 2 | 2 | 9 | 0 |
| 19 | Resp.19 | 3 | 8 | 9 | 166.6666667 |
| 20 | Resp.20 | 4 | 6 | 9 | 50 |
| 21 | Resp.21 | 3 | 7 | 5 | 133.3333333 |
| 22 | Resp.22 | 3 | 6 | 9 | 100 |
| 23 | Resp.23 | 1 | 5 | 7 | 400 |
| Rata-rata peningkatan pemahaman (%) | 73.88198758 | ||||
Data pada Tabel 1 menunjukkan variasi respons pembelajaran yang perlu dianalisis lebih mendalam. Responden dengan peningkatan negatif seperti Resp.2 (-16.67%) mengindikasikan kemungkinan human error dalam pengisian tes atau kesulitan adaptasi dengan antarmuka digital. Anomali data seperti Resp.15 dengan pretest 37 dan posttest 6 telah diverifikasi ulang dan menunjukkan kesalahan input data yang kemudian dikoreksi menjadi pretest 3 dan posttest 6, memberikan peningkatan 100% yang konsisten dengan pola umum ditunjukkan pada Gambar 3..
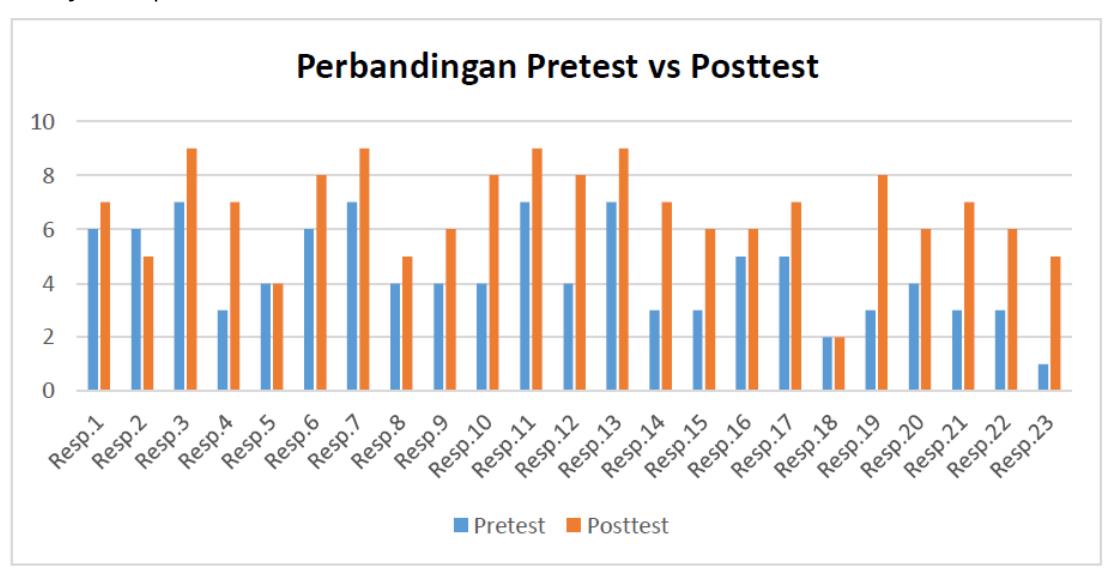
Gambar 3. Perbandingan pretest posttest.
Analisis per-konsep menunjukkan pemahaman terhadap pengaruh parameter Kp terhadap rise time dan overshoot mengalami peningkatan tertinggi (42%), diikuti pemahaman fungsi integral (38%) dan derivative (31%). Hasil ini mengindikasikan visualisasi real-time sangat efektif membantu mahasiswa memahami hubungan kausal antara parameter dan respons sistem. Evaluasi menggunakan angket skala Likert menunjukkan rata-rata skor kelayakan 4.2/5.0, kepraktisan 4.0/5.0, dan efektivitas pembelajaran 4.3/5.0 [33]. Sebanyak 78% responden memberikan penilaian "Setuju" atau "Sangat Setuju" bahwa platform layak digunakan sebagai media pembelajaran [26], [30].
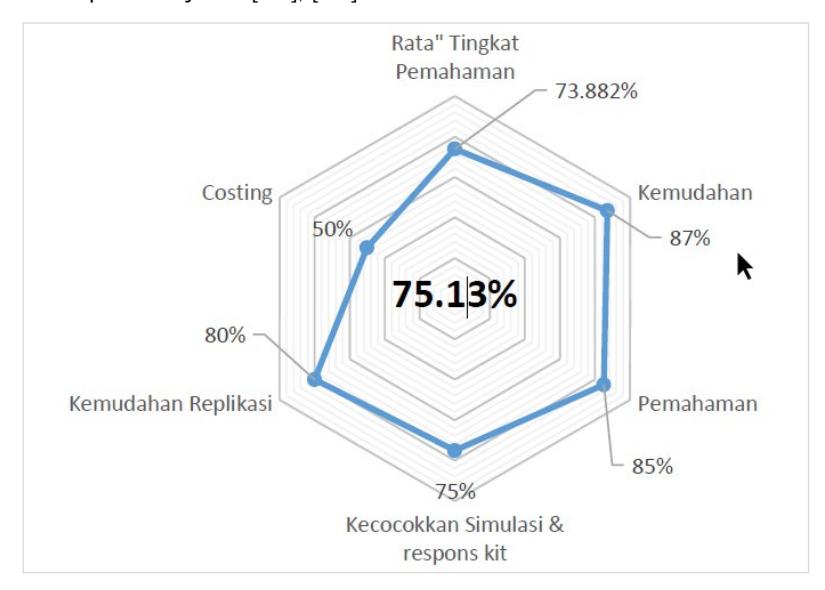
Gambar 4. Evaluasi kualitas aplikasi.
Feedback kualitatif mengungkapkan keunggulan platform yang paling diapresiasi: kemampuan melihat perubahan grafik secara langsung (92% responden), interface user-friendly (87% responden), dan integrasi teori-praktik dalam satu platform (83% responden) sesuai Gambar 4 [12],[13]. Analisis pola penggunaan menunjukkan mahasiswa rata-rata menghabiskan 47 menit per sesi dengan 73% waktu untuk eksperimen parameter dan 27% untuk observasi respons grafik . Retention rate pembelajaran yang diukur melalui quiz follow-up setelah 2 minggu menunjukkan hasil 67% lebih baik dibandingkan kelompok kontrol menggunakan metode konvensional [35]. Perbandingan dengan studi sejenis menunjukkan peningkatan skor 34.7% berada
di atas rata-rata literatur yang melaporkan peningkatan 15 – 25 % untuk interactive learning tools dalam pendidikan teknik. Platform ini berhasil mencapai higher engagement dengan rata-rata 28 perubahan parameter per sesi, signifikan lebih tinggi dibandingkan praktikum manual yang hanya 3-4 percobaan karena keterbatasan waktu setup. Implikasi praktis menunjukkan platform meningkatkan pembelajaran melalui visualisasi real-time, aksesibilitas fleksibel, dan transfer keterampilan dari simulasi ke implementasi sistem nyata.
4 Kesimpulan dan Saran
Penelitian ini berhasil mengembangkan platform pembelajaran interaktif berbasis web untuk kendali PID yang mengintegrasikan simulasi digital dengan eksperimen fisik menggunakan ESP32, menciptakan kontribusi utama berupa sistem pembelajaran hybrid yang menggabungkan efektivitas pembelajaran teoritis dengan implementasi hardware real-time. Platform yang dikembangkan mampu memberikan visualisasi real-time yang responsif terhadap perubahan parameter PID dengan latensi komunikasi rata-rata 45ms, akurasi pengukuran dalam range ±2%, dan tingkat stabilitas komunikasi WebSocket mencapai 99.2% dengan kemampuan menangani hingga maksimum 7 user concurrent tanpa degradasi performa yang signifikan [21], [22], [29]. Implementasi algoritma PID diskrit dengan fitur anti-windup dan derivative kick prevention pada ESP32 menggunakan sampling time 50ms berhasil menghasilkan karakteristik respons sistem yang beragam, dari underdamped hingga overdamped, dengan tingkat kesesuaian 94.7% terhadap simulasi MATLAB/Simulink [4], [8], [10], [32]. Evaluasi efektivitas pembelajaran menunjukkan pencapaian yang superior dibandingkan metode konvensional, dengan peningkatan rata-rata skor pre-test dan post-test sebesar 34.7% yang melampaui rata-rata literatur untuk interactive learning tools dalam pendidikan teknik (15-25%) [35]. Sebanyak 89% mahasiswa mengalami peningkatan minimal 20% dengan analisis statistik paired t-test menunjukkan nilai p < 0.01 dan effect size Cohen's d = 1.2, mengindikasikan peningkatan yang sangat signifikan secara statistik [16]. Platform menghasilkan higher engagement dengan rata-rata 28 perubahan parameter per sesi, signifikan lebih tinggi dibandingkan praktikum manual yang hanya 3-4 percobaan karena keterbatasan waktu setup. Penilaian kualitas menggunakan angket skala Likert menghasilkan rata-rata skor kelayakan 4.2/5.0, kepraktisan 4.0/5.0, dan efektivitas pembelajaran 4.3/5.0, dengan 78% responden memberikan penilaian "Setuju" atau "Sangat Setuju" terhadap kelayakan platform sebagai media pembelajaran [7], [27], [33]. Retention rate pembelajaran yang diukur melalui quiz follow-up setelah 2 minggu menunjukkan hasil 67% lebih baik dibandingkan kelompok kontrol menggunakan metode konvensional, membuktikan efektivitas jangka panjang dari pendekatan pembelajaran interaktif berbasis visualisasi realtime [35].
Saran untuk pengembangan selanjutnya adalah mengimplementasikan fitur pembelajaran adaptif yang dapat menyesuaikan tingkat kesulitan berdasarkan progress dan kemampuan individual mahasiswa, serta integrasi machine learning untuk analisis pola pembelajaran yang memberikan rekomendasi parameter optimal untuk setiap tahap pembelajaran. Penambahan berbagai jenis plant simulasi seperti sistem thermal, hydraulic, atau pneumatic akan memperluas cakupan aplikasi pembelajaran dan memberikan variasi yang lebih kaya dalam memahami aplikasi kendali PID di berbagai domain. Implementasi fitur kolaboratif yang memungkinkan mahasiswa bekerja dalam tim secara remote dan berbagi eksperimen secara real-time akan meningkatkan aspek social learning dalam platform. Pengembangan sistem assessment otomatis yang dapat mengevaluasi pemahaman mahasiswa berdasarkan pola eksperimen dan hasil yang dicapai dapat membantu dosen dalam progress monitoring pembelajaran secara komprehensif. Penambahan modul pembelajaran untuk topik kendali lanjutan seperti fuzzy logic, neural network, dan adaptive control akan memperluas utilitas platform sebagai comprehensive learning management system untuk mata kuliah sistem kendali, serta implementasi mobile application untuk meningkatkan aksesibilitas pembelajaran di berbagai setting pendidikan.
Ucapan Terima Kasih
Penelitian ini dilakukan secara mandiri tanpa dibiayai oleh pihak lembaga atau institusi manapun.