
1. Pendahuluan
Gelas ukur merupakan alat ukur volume yang digunakan sebagai standar untuk menguji alat ukur volume lainnya [1]. Penggunaan Gelas ukur dapat diperuntukkan untuk menguji alat ukur volume seperti Pompa Ukur Bahan Bakar Minyak (PUBBM) untuk pengujian anti drain [1]. Gelas ukur juga sering kita jumpai di laboratorium untuk mengukur volume suatu cairan.
Penggunaan gelas ukur sering kali digunakan untuk mengukur volume cairan di laboratorium karena memiliki ketelitian yang cukup baik untuk mengukur volume cairan. Sebagai media penampung suatu cairan atau larutan, Gelas ukur dapat terpengaruhi oleh reaksi kimia dari bahan yang ada di dalamnya sehingga seiring dengan berjalannya waktu dapat mengubah volume peralatan gelas. Untuk mempertahankan kemampuan gelas ukur dalam mengukur cairan, perlu dilakukan kalibrasi atau verifikasi [2]. Tidak hanya pada gelas ukur, alat ukur lainnya pun perlu diverifikasi untuk memastikan bahwa standar ukuran mampu tertelusur dan memenuhi syarat teknis Standar Ukuran Tingkat 2, Standar Ukuran Tingkat 3, Standar Ukuran Tingkat 4, dan
Standar Kerja sesuai dengan Hierarki Standar Ukuran [3]. Verifikasi gelas ukur ini bertujuan untuk mengetahui ketertelusuran pengukuran. Verifikasi pada gelas ukur melibatkan banyak faktor yang berpengaruh seperti faktor lingkungan yang sangat berperan pada perubahan suhu cairan, massa isi, massa kosong cairan dll. Gelas ukur memiliki metode penampungan to contain (In) dan to deliver (Ex) [4].
Untuk melakukan verifikasi, gelas ukur perlu diisi oleh aquades kemudian dituangkan kembali untuk membuang cairan dan menguji pengukuran cairan tersebut [4]. Saat ini proses verifikasi gelas ukur masih dilakukan secara manual oleh penguji berikut dengan menghitung waktu pengosongan dari gelas ukur tersebut. Hal ini dapat menjadi tantangan apabila verifikasi gelas ukur dilakukan dalam jumlah banyak karena penguji harus mengisi dan menuangkan cairan dari gelas ukur secara manual dan bergantian. Tentunya hal ini akan menyita waktu yang cukup lama dan akan mempengaruhi hasil pengujian dari verifikasi gelas ukur tersebut. Hal tersebut dapat menyebabkan potensi kesalahan baca/paralaks yang disebabkan oleh manusia sehingga hasil pengukuran yang didapatkan tidak akurat [5]. Purwarupa ini membantu proses verifikasi gelas ukur dalam mekanisme proses penuangan. Bentuk purwarupa terinspirasi dari gelas ukur yang dipasang pada tiang statif seperti pada Gambar 1 lalu dikembangkan menjadi bentuk otomatis sehingga gelas ukur dapat berputar menuangkan cairan tanpa bantuan operator.
Gambar 1. Gelas ukur pada tiang statif.
Purwarupa ini juga dirancang untuk mengukur waktu pengosongan gelas ukur 100 ml. Waktu pengosongan ini diketahui dari rentang waktu tertentu yang dihitung mulai dari cairan dikosongkan ditambah dengan waktu tetes [1]. Waktu pengosongan gelas ukur yaitu 1 menit atau 60 sekon. Selain waktu pengosongan, waktu tetes gelas ukur juga perlu diperhatikan. Waktu tetes dihitung mulai dari aliran terputus dan berubah menjadi tetesan pertama kali. Pada gelas ukur, waktu tetes yang ditetapkan adalah 30 sekon dan berlaku untuk semua kapasitas gelas ukur [1]. Pengosongan gelas ukur membantu cairan yang ada di dalamnya keluar sampai tidak tersisa. Penuangan dilakukan dalam 3 variasi sudut untuk mengetahui posisi mana yang menghasilkan pengosongan secara maksimal yaitu sudut 120 derajat, 150 derajat, dan 170 derajat. Variasi sudut ini dipilih untuk menentukan sudut mana yang paling sesuai hingga cairan dapat tertuang secara sempurna.
Penuangan gelas ukur ini memerlukan alat yang bisa memutar gelas ukur. Dalam hal ini, penggunaan motor servo dipilih karena sesuai dengan spesifikasi yang dibutuhkan [6]. Motor servo berfungsi untuk mendorong atau memutar objek dengan presisi tinggi dalam hal posisi sudut, akselerasi dan kecepatan [7]. Berdasarkan penelitian yang sudah dilakukan sebelumnya [8],[9], Servo MG996R sesuai untuk memiringkan gelas ukur karena servo memiliki sistem close-loop sehingga dapat mempertahankan horn pada posisinya [10]. Jenis servo ini menggunakan sinyal PWM (Pulse Width Modulation) yang selanjutnya diintegrasikan menggunakan mikrokontroler [11]. Sinyal PWM ini diteruskan ke motor servo yang bergerak hingga 180 derajat [12]. Hasil pengukuran ditampilkan pada LCD 16x2 I2C [13]. Kalibrasi gelas ukur yang dilakukan menggunakan air aquades atau air destilasi yang bersifat murni tanpa ada campuran zat apapun [3] [14]. Hasil dari penelitian ini akan menunjukkan karakteristik pengukuran seperti bias, akurasi, presisi, dan kesalahan. Banyak hal yang memengaruhi timbulnya kesalahan dalam penelitian sehingga penelitian ini diharapkan dapat mengatasi masalah tersebut [15], [16].
2. Metode
Purwarupa dirancang dengan membuat desain awal purwarupa, pembuatan purwarupa, kalibrasi waktu, kalibrasi sudut servo, pengujian keseluruhan purwarupa, analisis waktu penuangan gelas ukur hingga sudut 120 derajat, analisis waktu penuangan gelas ukur hingga sudut 150 derajat, analisis penuangan gelas ukur hingga sudut 170 derajat, dan analisis waktu pengosongan gelas ukur. Pengujian tersebut penting dilakukan untuk memastikan purwarupa dapat menggerakan gelas ukur hingga menuangkan cairan dengan seharusnya. Tahapan penelitian digambarkan pada Gambar 2.
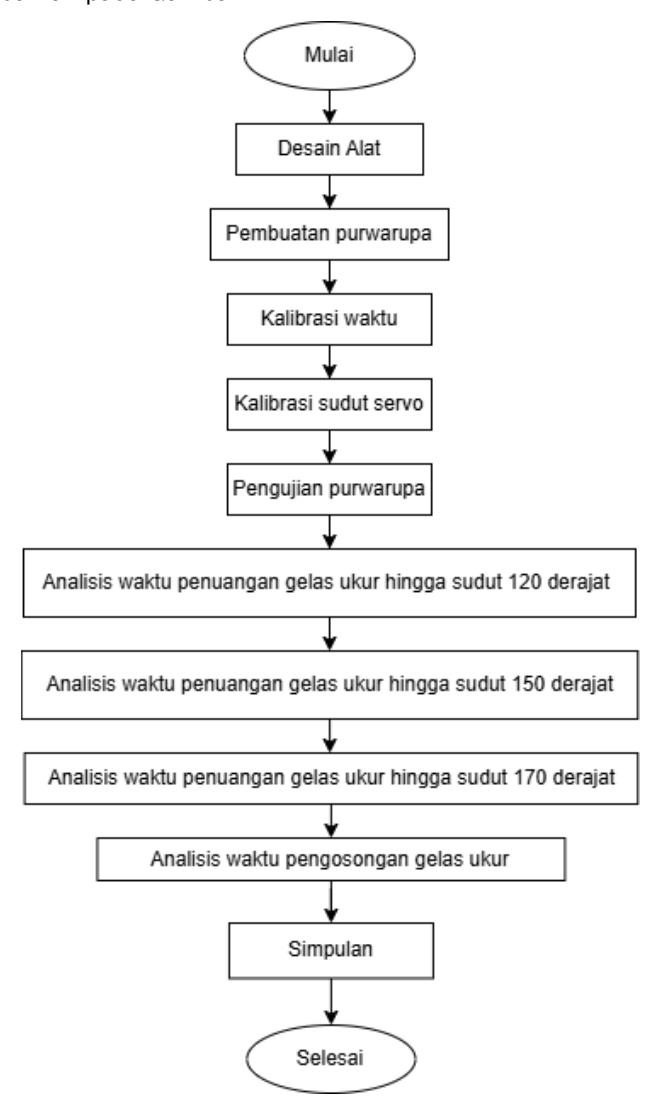
Gambar 2. Diagram blok tahap penelitian.
Untuk kelancaran purwarupa dalam bergerak dibuatlah prinsip kerja purwarupa dalam bentuk diagram blok pada Gambar 3.
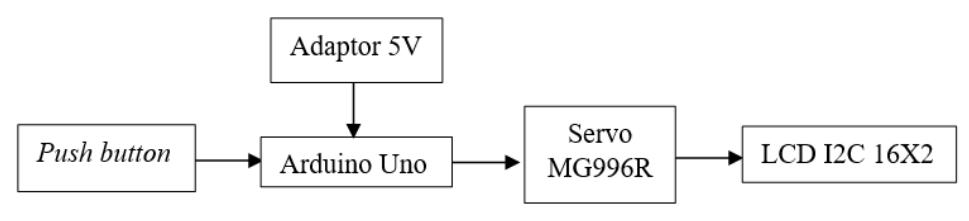
Gambar 3. Diagram blok sistem.
Gambar 3 menjelaskan prinsip kerja dari purwarupa. Ketika adaptor dihubungkan ke Arduino Uno, maka kondisi layar LCD akan memunculkan tampilan awal "Servo Kontrol" pada baris pertama dan pada baris kedua menampilkan "Servo : 0 derajat" yang menunjukkan bahwa posisi servo berada pada posisi awal yaitu o derajat. Push button berguna untuk memulai proses yang dijalankan oleh servo dan komponen lainnya.
Ketika push button 1 ditekan 1 kali maka servo akan bergerak menuju sudut 120 derajat. Tampilan LCD saat push button ditekan 1 kali akan menampilkan servo bergerak pada sudut sekian derajat hingga menunjukan "Sudut: 120 derajat" pada baris kedua. Sedangkan pada baris pertama menunjukan waktu dalam satuan sekon sebagai timer saat servo mulai bergerak. Waktu ini akan terus berjalan hingga servo kembali ke posisi ke 0 derajat. Kemudian saat push button ditekan 1 kali selanjutnya servo akan bergerak ke posisi 150 derajat sehingga tampilan LCD pada baris Kedua pun ikut berubah menjadi "Sudut: 150 derajat. Dan ketika push button ditekan 1 kali selanjutnya servo akan bergerak ke posisi 170 derajat dimana ini merupakan posisi terakhir pergerakan servo. Tampilan LCD berubah menjadi "Sudut: 170 derajat". Saat gelas ukur dalam keadaan posisi 170 derajat, terdapat delay waktu 30 sekon sebagai waktu tetes penuangan gelas ukur. Lalu secara otomatis setelah waktu delay 30 sekon selesai maka servo akan kembali ke posisi semula yaitu 0 derajat. Hasil akhir tampilan LCD akan menghasilkan waktu total penuangan cairan gelas ukur. Tombol reset digunakan apabila sewaktu-waktu terjadi keadaan darurat yang mengharuskan sistem diberhentikan secara cepat. Untuk lebih jelasnya digambarkan pada Gambar 4.
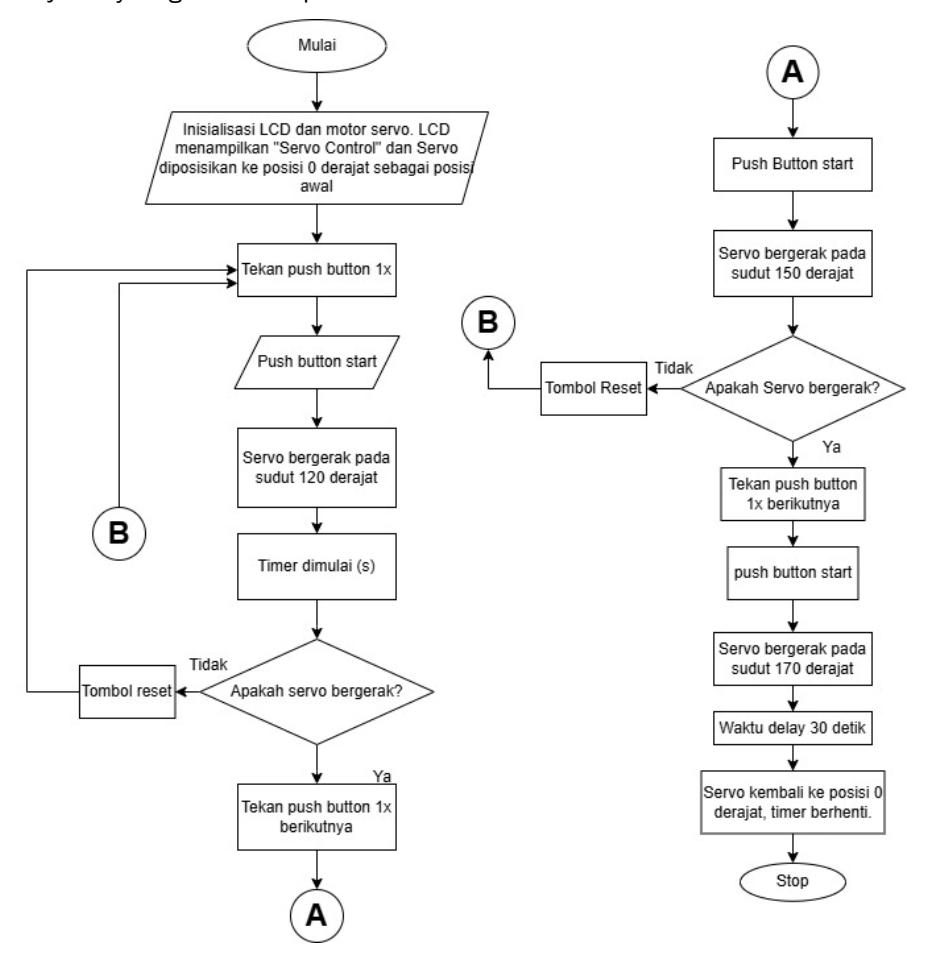
Gambar 4. Diagram alir prinsip kerja purwarupa.
Pada Gambar 4 digambarkan proses penuangan gelas ukur 100 ml melalui proses otomasi. Purwarupa ini membantu proses penuangan yang awalnya dilakukan oleh manusia secara manual lalu dibuat sistem otomasi penuangan otomatis yang dapat menuangkan cairan serta menghitung sudut kemiringan dan waktu pengosongan secara otomatis.
3. Hasil dan Diskusi
Purwarupa alat bantu penuang gelas ukur 100 ml menggunakan motor servo berbasis Arduino Uno telah berhasil dibuat sesuai dengan desain yang dirancang sebelumnya. Purwarupa ini terdiri dari pusat kontrol, rangka alat penuang, bagian klem gelas ukur, dan dudukan servo. Pusat Kontrol terdiri dari 2 buah push button yang memiliki fungsi yang berbeda. Push button pertama (berwarna biru) berfungsi untuk menjalankan motor servo dan program yang sudah tersimpan di Arduino Uno sedangkan Push button kedua (berwarna merah) berfungsi sebagai tombol reset/tombol darurat yang ditekan apabila ada pergerakan servo yang tidak sesuai dengan perintah. Berikut merupakan Gambar 5 yang memperlihatkan desain awal purwarupa dan hasil akhir purwarupa.
(a) (b) (c) (d)
Gambar 5. (a) Desain rancangan purwarupa, (b) Desain pusat kontrol, (c) Hasil akhir prototipe tampak depan, (d) Hasil akhir prototipe tampak atas.
Push button pertama (berwarna biru) memiliki 3 pergerakan sudut yang dapat digerakan secara berurutan yaitu bergerak pada sudut 120 derajat, 150 derajat, dan 170 derajat. Posisi gelas ukur yang digerakkan secara bertahap membantu dalam melihat perubahan waktu dan cairan yang dikeluarkan pada kemiringan tertentu. Tampilan pusat kontrol akan ditampilkan seperti pada Gambar 6.

Gambar 6. (a) Tampilan pada sudut 120ᵒ, (b) Tampilan pada sudut 150ᵒ, (c) Tampilan pada sudut 170ᵒ.
Tampilan gelas ukur saat dipasang pada purwarupa terlihat pada Gambar 7. Gambar 7 menggambarkan posisi gelas ukur saat berada pada sudut 0 derajat, 120 derajat, 150 derajat, dan 170 derajat.
Gambar 7. (a) Tampilan gelas ukur pada sudut 0ᵒ, (b) Tampilan gelas ukur pada sudut 120ᵒ, (c) Tampilan gelas ukur pada sudut 150ᵒ, (d) Tampilan gelas ukur pada sudut 170ᵒ.
3.1 Kalibrasi Sudut
Kalibrasi sudut ini dilakukan pada 3 titik yaitu di sudut 120 derajat, 150 derajat, dan 170 derajat. Kalibrasi dilakukan dengan menggunakan standar berupa busur derajat. Untuk memastikan keakuratan dari pergerakan servo dilakukan perbandingan dengan alat ukur analog berupa busur derajat [17]. Tabel 1-3 menampilkan hasil sudut dari pergerakan servo dibandingkan dengan standar dalam hal ini yaitu busur derajat. Masing-masing sudut diberikan pengulangan pengujian sebanyak 10 kali pengulangan untuk menguji konsistensi dari kemampuan servo dalam menggerakan gelas ukur.
Tabel 1. Penunjukan sudut 120o Tabel 2. Penunjukan sudut 150o Tabel 3. Penunjukan sudut 170o
| Servo (ᵒ) | ||||
|---|---|---|---|---|
| Standar (ᵒ) | Servo (ᵒ) | Standar (ᵒ) | Servo (ᵒ) | |
| 120 | 150 | 145 | 170 | 170 |
| 120 | 150 | 150 | 170 | 165 |
| 120 | 150 | 150 | 170 | 165 |
| 120 | 150 | 150 | 170 | 170 |
| 120 | 150 | 145 | 170 | 165 |
| 120 | 150 | 145 | 170 | 170 |
| 120 | 150 | 145 | 170 | 170 |
| 120 | 150 | 150 | 170 | 170 |
| 120 | 150 | 150 | 170 | 170 |
| 120 | 150 | 150 | 170 | 170 |
Penggunaan busur derajat dalam penelitian ini hanya sebagai pembanding pergerakan servo dimana sebelumnya servo sudah diatur melalui pemrograman pada Arduino IDE untuk mengatur posisi awal atau titik 0 derajat dari servo tersebut.
3.2 Hasil Waktu Penuangan Gelas Ukur
Dalam pengujian ini digunakan stopwatch sebagai pembanding purwarupa yang sudah dibuat [18]. Waktu pada purwarupa ditampilkan dalam satuan sekon di layar LCD. Tampilan waktu ini diatur pada program yang sudah terintegrasi dengan Arduino Uno. Penghentian waktu pada stopwatch dilakukan secara manual menggunakan tangan penguji. Oleh karena itu saat membandingkan menggunakan stopwatch sebagai standar, sebisa mungkin tangan harus cepat tanggap mengikuti pergerakan servo untuk menghasilkan hasil yang sesuai dan tidak terlalu jauh.
Waktu penuangan ini didapat dari waktu pengosongan yaitu rentang waktu tertentu yang dihitung mulai dari cairan dikosongkan ditambah dengan waktu tetes. Pada purwarupa ini, waktu pengosongan diambil berdasarkan 3 titik yaitu pada sudut 120, 150, dan 170 derajat.
Tabel 4. Waktu yang dibutuhkan gelas ukur untuk menuangkan cairan hingga sudut 120 derajat
| Waktu yang diperoleh | Hasil pembacaan stopwatch (s) | Hasil pembacaan LCD (s) |
|---|---|---|
| Rata-rata | 9,89 | 9,42 |
| Standar Deviasi | 5,97 × 10-2 | 4,83 × 10-3 |
| Kesalahan (%) | 4,76 | |
Tabel 4 menunjukkan bahwa rata-rata waktu yang dibutuhkan untuk menuangkan cairan dari dalam gelas ukur yaitu 9,89 sekon berdasarkan pembacaan stopwatch dan menggunakan purwarupa waktu yang dibutuhkan adalah 9,42 sekon. Waktu yang dihasilkan dari pembacaan stopwatch didapatkan berdasarkan kecepatan penguji dalam menghentikan tombol stop dan penglihatan mata saat gelas ukur sudah berhenti di sudut 120 derajat. Hasil pembacaan waktu pada LCD didapat dari hasil pengolahan program oleh Arduino Uno yang otomatis akan berhenti jika sudah berada di sudut 120 derajat. Kesalahan didapatkan dari hasil pengukuran waktu luang pada alat ukur standar (stopwatch) dan alat ukur uji (purwarupa). Pada sudut 120 derajat ini, cairan dari dalam gelas ukur tertuang tetapi tidak semuanya. Masih ada banyak cairan yang tersisa di dalam karena posisi gelas ukur yang kurang miring. Oleh karena itu dilakukan kembali pengujian selanjutnya dengan sudut yang lebih besar untuk menuangkan gelas ukur dan menghabiskan volume air yang ada di dalamnya.
Tabel 5. Waktu yang dibutuhkan gelas ukur untuk menuangkan cairan hingga sudut 150 derajat
| Waktu yang diperoleh | Hasil pembacaan stopwatch (s) | Hasil pembacaan LCD (s) |
|---|---|---|
| Rata-rata | 12,38 | 11,91 |
| Standar Deviasi | 7,76 × 10-2 | 3,00 × 10-3 |
| Kesalahan (%) | 3,78 | |
Tabel 5 menunjukkan waktu yang dibutuhkan untuk menuangkan cairan dari dalam gelas ukur hingga ke sudut 150 derajat. Pada sudut ini cairan yang keluar sudah habis hanya tersisa beberapa tetesan kecil saja karena posisi gelas ukur yang lebih menjungkir. Rata-rata waktu yang diperoleh dari pembacaan stopwatch yaitu 12,38 sekon sedangkan pada pembacaan LCD diperoleh 11,91 sekon. Kesalahan yang didapatkan yaitu 3,78 sekon. Hasil data ini juga didapatkan dari responsibilitas penguji dan kepekaan dari alat uji purwarupa yang digunakan.
Tabel 6. Waktu yang dibutuhkan gelas ukur untuk menuangkan cairan hingga sudut 170 derajat
| Waktu yang diperoleh | Hasil pembacaan stopwatch (s) | Hasil pembacaan LCD (s) |
|---|---|---|
| Rata-rata | 13,97 | 13,59 |
| Standar Deviasi | 5,90 × 10-2 | 4,71 × 10-3 |
| Kesalahan (%) | 2,73 | |
Tabel 6 menunjukan waktu yang diperoleh gelas ukur untuk menuangkan cairan pada sudut 170 derajat. Setelah cairan keluar hingga habis, berlaku waktu tetes otomatis yaitu 30 sekon sebelum gelas ukur kembali ke posisi 0 derajat. Waktu tetes ini membantu pengosongan gelas ukur sehingga semakin sedikit cairan yang tersisa di dalamnya. Rata-rata waktu yang diperoleh dari pembacaan stopwatch yaitu sebesar 13,97 sekon sedangkan hasil pembacaan LCD diperoleh 13,59 sekon dengan nilai kesalahan 2,73 sekon. Setelah cairan keluar hingga habis, berlaku waktu tetes otomatis dari program yaitu 30 sekon sebelum gelas ukur kembali ke posisi 0 derajat.
Berdasarkan data yang sudah didapat pada Tabel 4, Tabel 5, dan Tabel 6 disajikan perbandingan waktu pada ketiga titik pada Gambar 8.
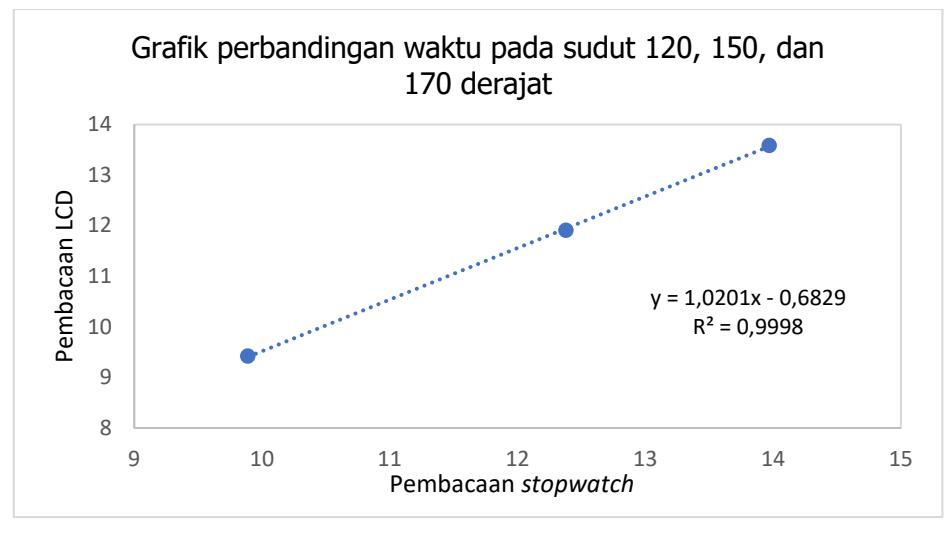
Gambar 8. Grafik kalibrasi waktu pada sudut 120, 150, dan 170 derajat.
Dari ketiga data yang diambil, didapat bahwa posisi penuangan yang paling optimal adalah pada posisi 170 derajat karena didapatkan kesalahan yang paling kecil diantara posisi yang lainnya. Posisi ini juga memaksimalkan penuangan cairan hingga tetesan terakhir karena posisinya yang sudah menjungkir dan hampir mendekati 180 derajat. Saat percobaan dilakukan pertama kali, dicoba pada sudut 90 derajat tetapi cairan yang keluar tidak laminer dan tersendat-sendat sehingga penuangan dimiringkan ke sudut 120 derajat untuk memancing pengosongan cairan. Setelah itu dimiringkan ke sudut 150 derajat dan berakhir di sudut 170 derajat.
Perhitungan waktu tetes dihitung sejak gelas ukur sudah berada pada posisi 170 derajat. Pada posisi ini cairan di dalam gelas kemungkinan besar sudah tertuang semua sehingga dapat dihitung waktu tetesnya secara otomatis diatur pada perangkat lunak Arduino IDE.
Adapun alasan mengapa tidak dimiringkan hingga ke sudut 180 derajat karena adanya kemungkinan membentur bagian yang lain dan menghalangi wadah cairan sehingga dicukupkan pada sudut 170 derajat. Selain itu jika gelas ukur dimiringkan ke sudut 180 derajat maka cairan yang harusnya tertuang secara sempurna akan menjadi menyebar ke seluruh dinding gelas ukur sehingga tetesannya tidak keluar dan hanya menempel di dinding gelas ukur.
3.3 Hasil Waktu Pengosongan Gelas Ukur
Setelah dilakukan uji coba pada gelas ukur secara bertahap yaitu pada pergerakan 120 derajat, 150 derajat, dan 170 derajat maka dihasilkan waktu pengosongan dari gelas ukur ini. Rata-rata data yang dihasilkan, diambil dari 30 kali pengujian. Tabel 7 memperlihatkan rata-rata waktu pengosongan gelas ukur 100 ml berdasarkan pembacaan stopwatch dan pembacaan LCD.
Tabel 7. Waktu pengosongan gelas ukur 100 ml menggunakan purwarupa
| Waktu yang diperoleh | Pembacaan stopwatch (s) | Pembacaan LCD (s) |
|---|---|---|
| Rata-rata | 62,69 | 62,18 |
| Standar Deviasi | 1,88 | 1,85 |
| Kesalahan (s) | - 0,81 | |
Semakin tinggi suhu sekitar maka semakin banyak tetesan cairan yang menempel pada gelas ukur dan sulit untuk dikeluarkan walaupun dalam kondisi miring. Sedangkan apabila berada pada kisaran suhu 20-22 derajat celsius, cairan yang tersisa pada dinding gelas ukur hanya sedikit bahkan hampir tidak ada. Oleh karena itu pengaturan suhu sangat penting untuk dilakukan sebelum melakukan pengujian. Gambar 8 akan menjelaskan mengenai linieritas dari waktu pengosongan gelas ukur 100 ml antara standar (stopwatch) dan uji (purwarupa).
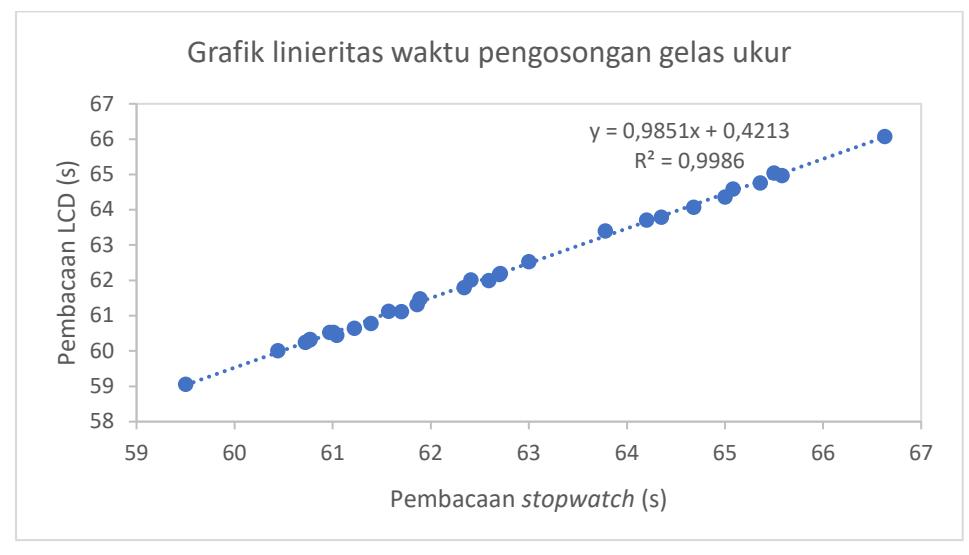
Gambar 9. Grafik linieritas waktu pengosongan menggunakan alat standar dan alat uji.
Gambar 9 memperlihatkan hubungan antara pengujian menggunakan alat ukur standar dan alat ukur uji. Grafik tersebut terdiri dari 2 variabel yaitu variabel dependen yang merupakan hasil dari pengukuran alat ukur uji dan variabel independen yang merupakan variabel yang dapat dikontrol atau diatur nilainya secara eksperimental. Grafik tersebut menghasilkan koefisien determinasi dimana R2=0,9986 yang mengindikasikan bahwa terdapat korelasi sangat kuat dan hampir sempurna antara kedua variabel tersebut. Koefisien determinasi yang mendekati 1 menunjukkan bahwa sebagian besar variasi dalam variabel dependen dapat dijelaskan oleh variabel independen. Atau dengan kata lain, terdapat 99,86 % variabilitas data dapat dijelaskan oleh hubungan linier antara kedua variabel tersebut.
https://doi.org/10.5614/joki.2025.17.2.1 E-ISSN: 2460-6340
4. Kesimpulan
Purwarupa ini dapat digunakan sebagai alat bantu penuang gelas ukur 100 ml dengan menggunakan motor servo dan berbasis mikrokontroler Arduino. Proses penuangan dilakukan secara bertahap mulai dari sudut 0 derajat, bergerak ke sudut 120 derajat, 150 derajat, 170 derajat lalu kembali ke posisi 0 derajat. Saat pergerakan servo berada pada sudut 120 derajat cairan belum habis sempurna karena masih ada cairan yang tertinggal sehingga menghasilkan tetesan air yang banyak. Saat pergerakan servo berada pada sudut 150 derajat, gelas ukur lebih menjungkir daripada sebelumnya tetapi masih terdapat tetesan. Saat pergerakan servo berada pada sudut 170 derajat semua cairan pada gelas ukur tertuang karena dibantu dengan adanya delay waktu 30 sekon sehingga cairan dari gelas ukur bisa keluar semuanya. Waktu pengosongan yang diperoleh menggunakan purwarupa ini menurut pembacaan standar adalah 62,69 sekon dan menurut pembacaan LCD sebesar 62,18 sekon sehingga kesalahan yang dihasilkan adalah -0,81 sekon. Dengan demikian dapat disimpulkan bahwa purwarupa ini dapat digunakan karena dapat menuangkan gelas ukur dengan sempurna dan menghitung waktu tetes dan waktu pengosongan secara otomatis. Namun akan lebih baik untuk menggunakan tambahan sensor seperti sensor sudut atau sensor jarak untuk mengetahui perubahan sudut agar lebih akurat dengan menghitung jarak tumpahan gelas ukur. Selain itu saat pengujian purwarupa ini diperlukan ketelitian dan kejelian mata penguji untuk menghasilkan nilai kesalahan yang kecil yang nantinya akan mempengaruhi hasil pengukuran.
Ucapan Terima Kasih
Terima kasih kepada Akademi Metrologi dan Instrumentasi dan Kementerian Perdagangan yang sudah mendukung pembuatan purwarupa ini hingga selesai.