
1 Pendahuluan
Pertumbuhan jumlah kendaraan di wilayah perkotaan yang tidak diimbangi dengan perluasan infrastruktur jalan telah menjadi penyebab utama kemacetan lalu lintas [1]. Sistem lampu lalu lintas di persimpangan, yang merupakan titik kritis dari jaringan jalan perkotaan, seringkali masih diatur dengan pola siklus tetap (fixedtime). Metode konvensional ini memiliki kelemahan mendasar karena tidak mempertimbangkan dinamika nyata arus kendaraan dan kondisi persimpangan yang selalu berubah [2]. Akibatnya, sering muncul antrian panjang, peningkatan waktu tunggu kendaraan, polusi udara,hingga kerugian ekonomi yang signifikan. Ketidakpastian dalam sistem lalu lintas disebabkan oleh fluktuasi jumlah kendaraan dan panjang antrian yang berubah secara dinamis, di mana hubungan antara kondisi lalu lintas dan durasi lampu hijau bersifat nonlinier
serta saling bergantung. Kompleksitas ini menjadikan sistem persimpangan sulit dimodelkan menggunakan pendekatan deterministik klasik [3]. Logika fuzzy dipandang sesuai untuk menangani karakteristik tersebut karena mampu merepresentasikan ketidakpastian dan perilaku nonlinier melalui aturan linguistik berbasis pengetahuan pakar [4]. Oleh karena itu, diperlukan sistem kontrol sinyal lalu lintas yang adaptif dan cerdas, yang mampu menyesuaikan durasi lampu hijau secara dinamis berdasarkan kondisi lalu lintas real-time. Berbagai penelitian menunjukkan bahwa pendekatan logika fuzzy mampu meningkatkan kinerja pengendalian sinyal lalu lintas dibandingkan metode konvensional, dengan penurunan waktu tunggu dan peningkatan throughput yang signifikan pada berbagai skenario lalu lintas [5],[6]. Ketidakpastian tersebut muncul akibat variasi kedatangan kendaraan, perilaku pengemudi, serta perubahan komposisi lalu lintas yang sulit dimodelkan secara deterministik. Selain itu, sistem lalu lintas bersifat nonlinear karena hubungan antara volume kendaraan, panjang antrian, dan waktu pengosongan tidak berbanding lurus, serta bersifat kompleks karena melibatkan interaksi simultan antar variabel yang saling mempengaruhi [7]. Sebagian besar penelitian terdahulu masih memodelkan sistem dengan jumlah variabel masukan yang terbatas, sehingga belum sepenuhnya merepresentasikan kompleksitas kondisi lalu lintas nyata di persimpangan.
Fahrunnisa et all. (2024) mengombinasikan deteksi kendaraan berbasis video menggunakan YOLO untuk memperoleh parameter panjang antrian dan laju arus sebagai masukan Fuzzy Logic Controller (FLC); melalui simulasi, pendekatan tersebut meningkatkan jumlah kendaraan yang berhasil keluar dari antrian sekitar 18% dan menurunkan waktu tunggu kendaraan sekitar 21% dibandingkan sistem eksisting [1]. Namun demikian, kualitas estimasi kondisi lalu lintas dari sistem deteksi berbasis visi dapat menurun pada kondisi padat khususnya karena occlusion dan tumpang tindih target sehingga akurasi deteksi berpotensi tidak stabil [8],[9]. Di sisi lain, pendekatan prioritas kendaraan darurat umumnya mengoptimasi metrik seperti waktu tunggu dan/atau pengelolaan panjang antrian pada rute kendaraan darurat agar kendaraan prioritas lolos lebih cepat, sembari mencoba menekan dampak negatif ke arus non-prioritas [10],[11]. Secara umum, mayoritas rancangan FLC pada kontrol sinyal lalu lintas masih berfokus pada dua variabel masukan yang relatif mudah diperoleh (misalnya panjang antrian dan state/posisi kendaraan, jumlah kendaraan dan waktu tunggu, atau kepadatan dan waktu tunggu), sehingga kompleksitas lapangan sering disederhanakan dalam basis aturan [12]–[16].
Sejumlah studi pengendalian sinyal adaptif telah mempertimbangkan arus lalu lintas campuran, termasuk memasukkan karakteristik atau klasifikasi kendaraan sebagai bagian dari variabel masukan [1],[6]. Namun demikian, pendekatan tersebut belum diterapkan secara konsisten dan umumnya masih terbatas pada representasi tertentu atau skenario spesifik. Dalam banyak kasus, variabel kelas kendaraan belum dimodelkan sebagai masukan independen yang secara eksplisit memengaruhi parameter operasional seperti durasi hijau, laju pengosongan antrian, atau start-up lost time. Sebagian besar penelitian tetap berfokus pada indikator berbasis kondisi antrian, waktu tunggu, dan posisi kendaraan sebagai variabel utama, seperti panjang antrian, waktu tunggu kendaraan, jarak ke simpang, dan prioritas kendaraan darurat [12],[13],[17],[18]. Bahkan pada studi terbaru yang memasukkan beberapa fitur tambahan (jarak, akumulasi waktu tunggu, prioritas darurat), variabel yang ditekankan tetap terkait kondisi antrian dan kedekatan kendaraan, bukan komposisi jenis kendaraan sebagai parameter yang mempengaruhi kebutuhan durasi hijau [18]. Dengan demikian, ketiadaan variabel jenis kendaraan pada formulasi masukan FLC masih merupakan celah penelitian yang relevan dan beralasan. Berdasarkan gap tersebut, penelitian ini mengusulkan Fuzzy Logic Controller (FLC) tipe Mamdani yang mengintegrasikan tiga variabel masukan secara simultan jumlah kendaraan, panjang antrian, dan jenis kendaraan untuk menangkap kompleksitas lalu lintas campuran dan memberikan alokasi durasi hijau yang lebih representatif terhadap kondisi nyata. Pendekatan ini akan diuji melalui lingkungan simulasi mikroskopis guna memvalidasi respon kontroler terhadap dinamika stokastik lalu lintas campuran tanpa risiko gangguan pada lalu lintas nyata. Setup simulasi dirancang untuk mereplikasi perilaku stop-and-go dan gap acceptance yang kritis pada kondisi jenuh.
2 Metode
Penelitian ini menerapkan metode eksperimen simulasi menggunakan Fuzzy Logic Controller (FLC) tipe Mamdani untuk sistem lampu lalu lintas adaptif. Prosedur eksperimen dilaksanakan mengacu pada kerangka kerja pengembangan sistem kontrol cerdas yang dipaparkan oleh [12], yang terdiri dari lima tahapan utama: (1) Identifikasi Variabel, yaitu mendefinisikan semesta pembicaraan (universe of discourse) dan fungsi keanggotaan untuk tiga variabel masukan (jumlah kendaraan, panjang antrian, dan jenis kendaraan) serta satu variabel keluaran (durasi lampu hijau); (2) Perancangan Basis Pengetahuan, yang meliputi penyusunan 27 aturan logika (fuzzy rules) berbentuk IF–THEN (3×3×3); (3) Konfigurasi Mesin Inferensi, menggunakan metode Mamdani dengan operator implikasi MIN, agregasi MAX, dan defuzzifikasi metode Centroid (Center of Area) untuk mengonversi nilai fuzzy menjadi durasi waktu tegas (crisp output); (4) Implementasi Sistem, dan (5) Pengujian & Validasi.
Mekanisme simulasi dibangun menggunakan bahasa pemrograman Python. Pustaka NumPy digunakan untuk operasi numerik array, sementara pustaka scikit-fuzzy (modul skfuzzy.control) digunakan sebagai kerangka kerja inti logika fuzzy (pembentukan Antecedent/Consequent, Rule, dan Control System). Untuk memvalidasi respon sistem terhadap ketidakpastian, simulasi dijalankan dengan membangkitkan data input sintetis yang merepresentasikan berbagai kondisi lalu lintas (sepi, normal, padat), kemudian respon kontroler divisualisasikan menggunakan pustaka Matplotlib. Alur tahapan pemrograman dan perancangan sistem ditunjukkan pada Gambar 1.
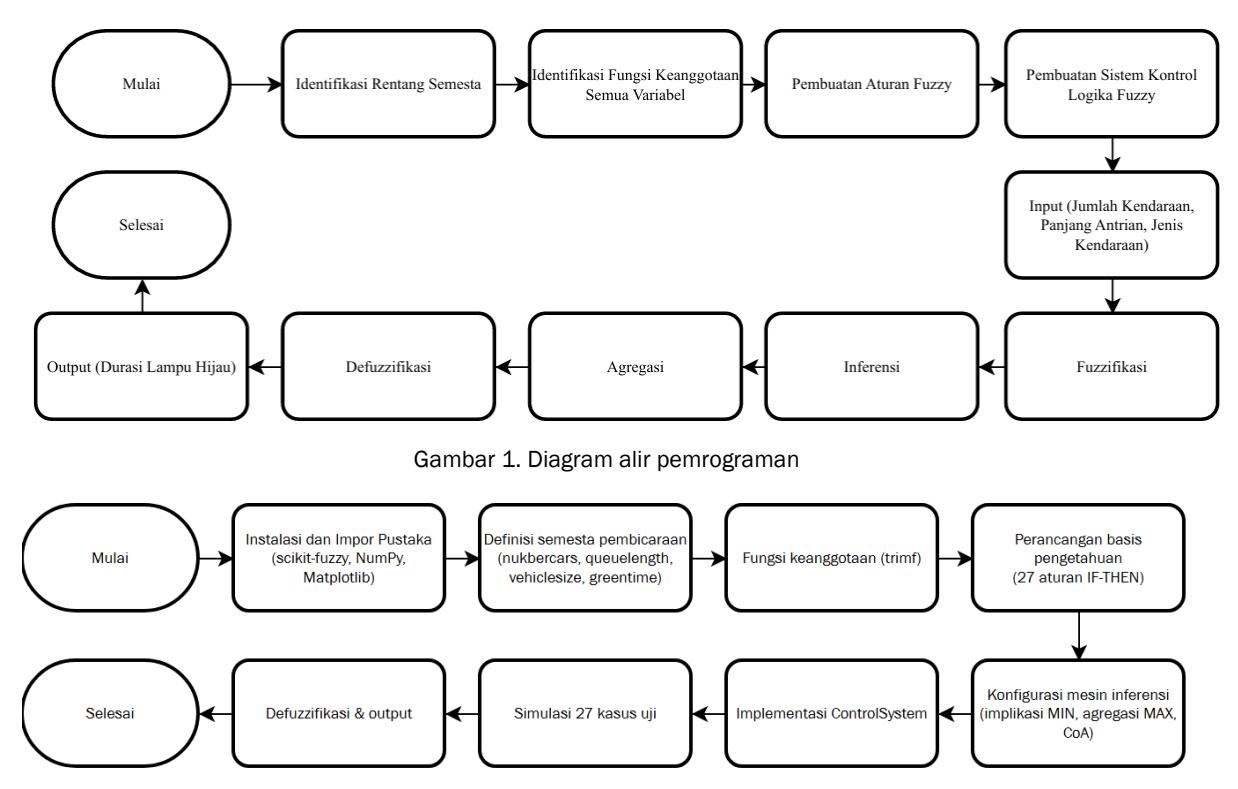
Gambar 2. Flowchart simulasi
Gambar 2 menunjukkan alur simulasi sistem Fuzzy Logic Controller (FLC) yang digunakan dalam penelitian ini. Proses dimulai dari tahap instalasi dan impor pustaka yang diperlukan, yaitu scikit-fuzzy, NumPy, dan Matplotlib sebagai pendukung komputasi dan visualisasi. Selanjutnya dilakukan definisi semesta pembicaraan (universe of discourse) untuk setiap variabel, meliputi jumlah kendaraan (number of cars), panjang antrian (queue length), ukuran kendaraan (vehicle size), dan durasi lampu hijau (greentime).
Tahap berikutnya adalah perancangan fungsi keanggotaan menggunakan bentuk triangular membership function (trimf), yang kemudian digunakan dalam penyusunan basis pengetahuan berupa 27 aturan logika IF–THEN. Setelah itu, sistem inferensi dikonfigurasi menggunakan metode Mamdani dengan operator implikasi MIN, agregasi MAX, dan defuzzifikasi Center of Area (CoA).
Model yang telah dirancang kemudian diimplementasikan dalam bentuk ControlSystem dan diuji melalui simulasi terhadap 27 kombinasi kasus uji yang merepresentasikan variasi kondisi lalu lintas. Hasil inferensi selanjutnya didefuzzifikasi untuk menghasilkan nilai keluaran berupa durasi lampu hijau (greentime), yang menjadi output akhir dari sistem.
Gambar 3. Skema lalu lintas
Objek penelitian disimulasikan berdasarkan karakteristik persimpangan tiga lengan bersinyal Jl. Dr. Setiabudi (Arteri Sekunder) – Jl. Gegerkalong Hilir (Kolektor) ditunjukkan pada Gambar 3. Konfigurasi persimpangan ini memiliki geometri asimetris dengan adanya pulau lalu lintas (traffic island) segitiga yang memisahkan arus belok kiri langsung (LTOR) dari arah Gegerkalong. Lokasi ini dipilih karena memiliki kompleksitas lalu lintas campuran (mixed traffic) yang tinggi: (1) fluktuasi volume kendaraan akibat gabungan arus wisata (Lembang) dan pendidikan (UPI/NHI); (2) heterogenitas kendaraan yang mencakup angkutan kota, bus pariwisata, dan sepeda motor; serta (3) gangguan hambatan samping dari aktivitas komersial yang memicu bottleneck. Parameter lingkungan nyata tersebut dikonversi menjadi constraints (batasan nilai) pada variabel input fuzzy untuk memastikan simulasi mendekati kondisi lapangan.
2.1 Variabel dan Fuzzifikasi
Fuzzifikasi adalah proses pemetaan nilai masukan tegas (crisp input) menjadi nilai derajat keanggotaan fuzzy (μ). Pada penelitian ini, representasi kurva fungsi keanggotaan (Membership Function/MF) menggunakan kombinasi kurva Segitiga dan Trapesium karena efisiensi komputasinya dalam sistem real-time [19]. Secara matematis, derajat keanggotaan untuk kurva segitiga dengan parameter {a, b, c} ditentukan oleh persamaan (1):
\[\mu_{segitiga}(x) = max \left( min, \left( \frac{x-a}{b-a} \frac{c-x}{c-b} \right), 0 \right)\] (1)
Di mana x adalah nilai input, serta a, b, c, adalah parameter yang menentukan koordinat kaki dan puncak kurva pada semesta pembicaraan. Variabel masukan didefinisikan sebagai berikut.
- Jumlah Kendaraan (0-30 unit): Rentang ini dipilih untuk mengakomodasi kepadatan lalu lintas campuran. Batas atas 30 unit dianggap kondisi jenuh (oversaturated) untuk satu siklus lampu pada ruas jalan pendek.
- 2. Panjang Antrian (0-150 meter): Mengacu pada Highway Capacity Manual (HCM), panjang antrian didefinisikan sebagai jarak hulu-hilir antrian. Dengan asumsi ruang henti kendaraan (queue storage) ratarata 6–7,6 meter per kendaraan (setara mobil penumpang) [20], rentang 150 meter cukup untuk menampung antrian sekitar 20–25 kendaraan.
- 3. Jenis Kendaraan (0-10 meter): Dimensi ini merepresentasikan panjang fisik kendaraan. Rentang ditetapkan berdasarkan spesifikasi kendaraan di Indonesia, di mana kendaraan <4 m dikategorikan ringan, sedangkan bus besar (>10 m hingga 13,5 m) dipetakan ke nilai maksimum (saturasi) dalam himpunan 'Berat' [21].
- 4. Durasi Lampu Hijau (0-120 detik): Batas maksimum 120 detik diadopsi dari pedoman FHWA untuk cycle length maksimum yang wajar pada persimpangan perkotaan guna mencegah waktu tunggu yang eksesif pada fase merah [22].
E-ISSN: 2460-6340
Secara numerik, parameter fungsi keanggotaan untuk variabel input Jumlah Kendaraan didefinisikan melalui persamaan (2) hingga (4):
\[\mu_{sedikit}(x) = \begin{cases} 1, & x \le 0\\ \frac{15 - x}{15}, & 0 < x15\\ 0, & x \ge 15 \end{cases}\] (2)
\[\mu_{sedang}(x) = \begin{cases} 0, & x \le 4 \text{ atau } x \ge 30\\ \frac{x-4}{11}, & 4 < x \le 15\\ \frac{30-x}{15}, & 15 < x < 30 \end{cases}\] (3)
\[\mu_{banyak}(x) = \begin{cases} 0, & x \le 15\\ \frac{x - 15}{15}, & 15 < x < 30\\ 1, & x \ge 30 \end{cases}\] (4)
Selanjutnya, fungsi keanggotaan untuk variabel Panjang Antrian dijabarkan dalam persamaan (5) hingga (7):
\[\mu_{pendek}(y) = \begin{cases} 1, & x \le 0\\ \frac{75 - y}{75}, & 0 < y < 75\\ 0, & x \ge 75 \end{cases}\] (5)
\[\mu_{sedang}(y) = \begin{cases} 0, & y \le 10 \text{ atau } y \ge 150\\ \frac{y - 10}{65}, & 10 < y \le 75\\ \frac{150 - y}{75}, & 75 < y < 150 \end{cases}\] (6)
\[\mu_{panjang}(y) = \begin{cases} 0, & y \le 75\\ \frac{y - 75}{75}, & 75 < y < 150\\ 1, & y \ge 150 \end{cases}\] (7)
Terakhir, fungsi keanggotaan untuk variabel Jenis Kendaraan yang merepresentasikan dimensi fisik dirumuskan dalam persamaan (8) hingga (10):
\[\mu_{ringan}(z) = \begin{cases} 1, & z \le 0\\ \frac{4.5 - z}{4.5}, & 3.0 < z < 4.5\\ 0, & z \ge 4.5 \end{cases}\](8)
\[\mu_{menengah}(z) = \begin{cases} 0, & z \le 4.0 \text{ atau } z \ge 7.0\\ \frac{z - 4.0}{1.5}, & 4.0 < z \le 5.5\\ \frac{7.0 - z}{1.5}, & 5.5 < z < 7.0 \end{cases}\](9)
\[\mu_{berat}(z) = \begin{cases} 0, & z \le 6.5\\ \frac{z - 6.5}{3.5}, & 6.5 < z < 10.0\\ 1, & z \ge 10.0 \end{cases}\] (10)
(a) (b) (c) (d)
Gambar 4. Kurva fungsi keanggotaan variabel input dan output: (a) Jumlah kendaraan, (b) Panjang antrian, (c) Jenis kendaraan, dan (d) Durasi lampu hijau.
Hasil visualisasi fungsi keanggotaan (membership function) untuk ketiga variabel input dan satu variabel output disajikan pada Gambar 4. Grafik ini menggambarkan proses pemetaan nilai masukan tegas (crisp input) ke dalam derajat keanggotaan fuzzy dalam interval 0 hingga 1.
Pada Gambar 4(a), variabel input jumlah_kendaraan direpresentasikan dalam domain 0–30 unit dengan tiga himpunan linguistik, yaitu Low (Sedikit), Medium (Sedang), dan High (Banyak). Selanjutnya, Gambar 4(b) memperlihatkan variabel panjang_antrian dengan rentang 0–150 meter, sementara Gambar 4(c) menggambarkan variabel jenis_kendaraan yang diklasifikasikan berdasarkan panjang fisik kendaraan dalam rentang 0–10 meter. Adapun Gambar 4(d) menampilkan variabel keluaran durasi_hijau dengan lima himpunan linguistik yang mencakup rentang waktu 0–120 detik.
Dari keseluruhan grafik dapat diamati bahwa antar-himpunan keanggotaan memiliki area perpotongan (overlapping). Ciri ini merupakan aspek penting dalam sistem logika fuzzy karena memungkinkan terjadinya transisi nilai output secara bertahap dan kontinu. Dengan demikian, perubahan kondisi lalu lintas tidak menghasilkan lonjakan nilai durasi lampu hijau secara tiba-tiba, tetapi menghasilkan penyesuaian yang proporsional dan halus terhadap dinamika arus kendaraan.
2.2 Basis Aturan
Basis aturan (Rule Base) merupakan komponen inti dari sistem inferensi yang memetakan ruang input ke ruang output melalui sekumpulan logika implikasi "IF-THEN". Mengingat sistem ini menggunakan tiga variabel masukan yang masing-masing memiliki tiga himpunan linguistik, maka total aturan yang terbentuk adalah 27 aturan (3x3x3). Penyusunan aturan ini didasarkan pada pengetahuan heuristik pakar lalu lintas (expert knowledge) sebagaimana praktik umum pada perancangan pengendali sinyal persimpangan [23]–[25]. Logika dasar yang dibangun adalah durasi lampu hijau berbanding lurus dengan beban lalu lintas. Namun, penelitian ini menambahkan bobot khusus pada variabel jenis kendaraan. Sebagai contoh, prioritas durasi hijau akan
ditingkatkan tidak hanya saat jumlah kendaraan 'Banyak', tetapi juga ketika terdeteksi kendaraan 'Berat' (bus/truk). Strategi ini diterapkan untuk mengakomodasi start-up lost time yang lebih besar akibat inersia massa kendaraan berat saat mulai bergerak dari posisi diam. Matriks aturan lengkap disajikan dalam Tabel 1.
Berdasarkan Tabel 1, terlihat bahwa sistem dirancang untuk memberikan kompensasi waktu terhadap dimensi kendaraan. Analisis pada aturan ke-3 dan ke-6 menunjukkan bahwa meskipun jumlah kendaraan tergolong 'Sedikit', jika sistem mendeteksi keberadaan kendaraan 'Berat', durasi hijau dinaikkan satu tingkat (dari 'Sangat Cepat' menjadi 'Cepat', atau dari 'Cepat' menjadi 'Normal'). Penyesuaian ini krusial untuk mencegah fenomena dilemma zone dan memastikan kendaraan berat memiliki waktu yang cukup untuk melintasi persimpangan dengan aman.
Tabel 1. Matriks aturan fuzzy
| No | Jumlah kendaraan | Panjang antrian | Jenis kendaraan | Output (durasi hijau) |
|---|---|---|---|---|
| 1 | Sedikit | Pendek | Ringan | Sangat cepat |
| 2 | Sedikit | Pendek | Menengah | Sangat cepat |
| 3 | Sedikit | Pendek | Berat | Cepat |
| 4 | Sedikit | Sedang | Ringan | Sangat cepat |
| 5 | Sedikit | Sedang | Menengah | Cepat |
| 6 | Sedikit | Sedang | Berat | Normal |
| 7 | Sedikit | Panjang | Ringan | Cepat |
| 8 | Sedikit | Panjang | Menengah | Normal |
| 9 | Sedikit | Panjang | Berat | Normal |
| 10 | Sedang | Pendek | Ringan | Sangat cepat |
| 11 | Sedang | Pendek | Menengah | Cepat |
| 12 | Sedang | Pendek | Berat | Normal |
| 13 | Sedang | Sedang | Ringan | Cepat |
| 14 | Sedang | Sedang | Menengah | Normal |
| 15 | Sedang | Sedang | Berat | Normal |
| 16 | Sedang | Panjang | Ringan | Normal |
| 17 | Sedang | Panjang | Menengah | Normal |
| 18 | Sedang | Panjang | Berat | Lama |
| 19 | Banyak | Pendek | Ringan | Cepat |
| 20 | Banyak | Pendek | Menengah | Normal |
| 21 | Banyak | Pendek | Berat | Normal |
| 22 | Banyak | Sedang | Ringan | Normal |
| 23 | Banyak | Sedang | Menengah | Normal |
| 24 | Banyak | Sedang | Berat | Lama |
| 25 | Banyak | Panjang | Ringan | Normal |
| 26 | Banyak | Panjang | Menengah | Lama |
| 27 | Banyak | Panjang | Berat | Sangat lama |
2.3 Inferensi dan Defuzzifikasi
Mekanisme inferensi sistem menggunakan metode Mamdani (Min-Max). Proses ini melibatkan operator AND (irisan) yang menggunakan fungsi Minimum untuk mendapatkan nilai kekuatan aturan (firing strength), sedangkan komposisi antar aturan menggunakan fungsi Maksimum (agregasi). Tahap akhir adalah defuzzifikasi untuk mengonversi himpunan fuzzy hasil agregasi menjadi nilai keluaran tegas (Z) menggunakan metode Centroid of Area (COA). Metode COA dipilih karena terbukti menghasilkan perubahan output yang lebih halus (smooth) dan robust dibandingkan metode Mean of Maximum (MOM), terutama untuk aplikasi kontrol yang membutuhkan presisi tinggi [11], [14].
Pada setiap skenario simulasi, sistem menghitung keluaran fuzzy melalui tahapan: (1) menghitung derajat keanggotaan setiap input terhadap fungsi keanggotaan yang didefinisikan, (2) menghitung firing strength setiap aturan, (3) membentuk keluaran fuzzy tiap aturan melalui proses implikasi (pemotongan/clipping), (4) mengagregasi seluruh keluaran aturan menjadi satu himpunan fuzzy keluaran, dan (5) melakukan
2.3.1 Firing Strength Setiap Aturan
Untuk aturan ke-i berbentuk: IF (Jumlah Kendaraan = A) AND (Panjang Antrian = B) AND (Jenis Kendaraan = C) THEN (Durasi Hijau = D), maka firing strength (\(\alpha_i\)) dihitung dengan operator AND = minimum:
\[\alpha_i = \min(\mu_{Jumlah}(n), \mu_{Antrian}(q), \mu_{Jenis}(s)) \tag{11}\]
2.3.2 Implikasi (Pemotongan Output Per Aturan)
defuzzifikasi menggunakan metode Centroid of Area (COA).
Konsekuen aturan ke-i menghasilkan himpunan fuzzy keluaran D. Dengan metode Mamdani, fungsi keanggotaannya dipotong pada tinggi \(\alpha_i\):
\[\mu_i(z) = \min(\alpha_i, \mu_D(z)) \tag{12}\] di mana z adalah domain durasi hijau (detik).
2.3.3 Agregasi Output
Nilai \(\mu_{agregasi}\) (z) pada persamaan (13) diperoleh dengan menggabungkan semua keluaran aturan menggunakan operator OR = maksimum (max aggregation):
\[\mu_{agregasi}(z) = \max(\mu_{hasil1}(z), \mu_{hasil2}(z), ..., \mu_{hasiln}(z))\] (13)
Untuk memperjelas proses komputasi numerik yang terjadi di dalam sistem simulasi, Tabel 2 menyajikan contoh cuplikan nilai diskrit \(\mu_{agregasi}(z)\) pada domain waktu tertentu berdasarkan skenario uji acak. Nilai-nilai ini merepresentasikan tinggi kurva daerah hasil setelah proses agregasi Max.
Tabel 2. Contoh Nilai \(\mu_{agregasi}(z_k)\)
| \(\overline{Z_k}\) | 30 | 40 | 50 | 60 | 70 |
|---|---|---|---|---|---|
| \(\mu_{agregasi}(z)\) | 0,20 | 0,50 | 0,80 | 0,40 | 0,10 |
Berdasarkan sampel data pada Tabel 2, proses defuzzifikasi COA dilakukan dengan membagi momen area terhadap luas total area. Dalam implementasi diskrit, formulasi integral didekati dengan penjumlahan berbobot (weighted sum) menggunakan persamaan (14):
\[Z \approx \frac{\sum \mu_{agregasi}(z_k) z_k}{\sum \mu_{agregasi}(z_k)}\] (14)
Substitusi nilai sampel menghasilkan estimasi durasi lampu hijau sesuai persamaan (15):
\[Z = \frac{0,20 \times 30 + 0,50 \times 40 + 0,80 \times 50 + 0,40 \times 60 + 0,10 \times 70}{0,20 + 0,50 + 0,80 + 0,40 + 0,10} = \frac{97}{2,0} \approx 48.5 \ detik\] (15)
Nilai tegas 48.5 detik inilah yang kemudian dieksekusi oleh kontroler sebagai durasi lampu hijau. Pada implementasi simulasi penuh menggunakan Python (scikit-fuzzy), perhitungan dilakukan pada resolusi domain yang lebih rapat (z = 0, 1, ..., 120) untuk menjamin presisi nilai centroid yang dihasilkan.
3 Hasil dan Diskusi
3.1 Implementasi dan Hasil Simulasi
Model FLC diimplementasikan pada Python menggunakan pustaka scikit-fuzzy (modul skfuzzy.control) yang menyediakan komponen variabel linguistik, aturan, serta mekanisme inferensi Mamdani dan defuzzifikasi. Arsitektur pengujian mengikuti alur umum pengendalian sinyal berbasis fuzzy : (i) akuisisi kondisi lalu lintas sebagai masukan tegas (crisp) jumlah kendaraan, panjang antrian, dan ukuran/jenis kendaraan; (ii) fuzzifikasi; (iii) evaluasi aturan; (iv) agregasi keluaran; (v) defuzzifikasi untuk menghasilkan durasi hijau tegas; dan (vi) pencatatan keluaran untuk analisis. Struktur proses ini sejalan dengan kerangka fuzzy signal control yang memisahkan tahap deteksi/ukur, pemodelan situasi, fuzzifikasi–inferensi–defuzzifikasi, hingga aksi kontrol. Hasil simulasi disajikan pada Tabel 3.
Nilai durasi hijau pada Tabel 3 diperoleh melalui proses komputasi deterministik pada FIS Mamdani, yaitu fuzzifikasi, evaluasi aturan (operator AND = minimum), agregasi keluaran (operator maximum), defuzzifikasi menggunakan metode Centroid of Area (COA) pada semesta diskrit durasi hijau [0,120] detik.
Berdasarkan 27 skenario simulasi, keluaran greentime berada pada rentang 5,09–91,60 detik. Secara umum, peningkatan jumlah kendaraan, panjang antrian, dan ukuran kendaraan cenderung diikuti oleh peningkatan durasi lampu hijau. Pada kondisi antrian pendek (10 m), greentime relatif rendah, yaitu 5,09– 25,00 detik, sedangkan pada antrian yang lebih panjang (140 m) nilai keluaran meningkat hingga 91,60 detik. Nilai tertinggi diperoleh pada kombinasi 28 kendaraan/lajur, antrian 140 m, dan ukuran kendaraan 9,0 m, yang menghasilkan greentime 91,60 detik. Sebaliknya, nilai terendah terjadi pada kombinasi 2 kendaraan/lajur, antrian 10 m, dan ukuran kendaraan 5,5 m, yaitu 5,09 detik.
Tabel 3. hasil simulasi pada berbagai skenario
| No | Jumlah kendaraan | Panjang antrian (m) | Ukuran kendaraan (m) | Greentime (s) |
|---|---|---|---|---|
| 1 | 2 | 10 | 3.5 | 6.70 |
| 2 | 2 | 10 | 5.5 | 5.09 |
| 3 | 2 | 10 | 9.0 | 25.00 |
| 4 | 2 | 75 | 3.5 | 6.70 |
| 5 | 2 | 75 | 5.5 | 25.00 |
| 6 | 2 | 75 | 9.0 | 45.00 |
| 7 | 2 | 140 | 3.5 | 21.13 |
| 8 | 2 | 140 | 5.5 | 41.31 |
| 9 | 2 | 140 | 9.0 | 45.00 |
| 10 | 15 | 10 | 3.5 | 6.70 |
| 11 | 15 | 10 | 5.5 | 25.00 |
| 12 | 15 | 10 | 9.0 | 45.00 |
| 13 | 15 | 75 | 3.5 | 25.00 |
| 14 | 15 | 75 | 5.5 | 45.00 |
| 15 | 15 | 75 | 9.0 | 45.00 |
| 16 | 15 | 140 | 3.5 | 37.55 |
| 17 | 15 | 140 | 5.5 | 45.00 |
| 18 | 15 | 140 | 9.0 | 71.39 |
| 19 | 28 | 10 | 3.5 | 21.13 |
| 20 | 28 | 10 | 5.5 | 41.31 |
| 21 | 28 | 10 | 9.0 | 45.00 |
| 22 | 28 | 75 | 3.5 | 37.55 |
| 23 | 28 | 75 | 5.5 | 45.00 |
| 24 | 28 | 75 | 9.0 | 71.39 |
| 25 | 28 | 140 | 3.5 | 37.55 |
| 26 | 28 | 140 | 5.5 | 71.59 |
| 27 | 28 | 140 | 9.0 | 91.60 |
3.2 Analisis dan Diskusi
Hasil simulasi terhadap 27 kombinasi input menunjukkan bahwa sistem Fuzzy Logic Controller (FLC) menghasilkan variasi durasi lampu hijau (greentime) pada rentang 5,09 hingga 91,60 detik. Variasi ini menunjukkan bahwa keluaran sistem merespons perubahan tiga variabel masukan, yaitu jumlah kendaraan, panjang antrian, dan ukuran kendaraan. Secara umum, peningkatan nilai masukan cenderung diikuti oleh peningkatan durasi hijau yang dihasilkan.
Pada kondisi jumlah kendaraan rendah (2 kendaraan/lajur) dan panjang antrian pendek (10 m), greentime berada pada kisaran 5,09–25,00 detik. Sebaliknya, pada kondisi jumlah kendaraan tinggi (28 kendaraan/lajur) dan panjang antrian maksimum (140 m), greentime meningkat hingga 91,60 detik, khususnya pada ukuran kendaraan terbesar (9,0 m). Pola ini menunjukkan bahwa sistem memberikan durasi hijau yang lebih panjang pada kondisi lalu lintas yang lebih padat dan kompleks.
Pengaruh ukuran kendaraan juga tampak jelas. Pada kombinasi jumlah kendaraan dan panjang antrian yang sama, peningkatan ukuran kendaraan dari 3,5 m ke 9,0 m umumnya diikuti oleh peningkatan greentime. Secara rata-rata, nilai greentime untuk ukuran kendaraan 3,5 m, 5,5 m, dan 9,0 m masing-masing adalah 22,22 detik, 38,26 detik, dan 53,82 detik. Hasil ini menunjukkan bahwa variabel ukuran kendaraan berkontribusi dalam memodulasi keputusan durasi hijau, sehingga representasi heterogenitas lalu lintas menjadi lebih eksplisit pada model yang digunakan.
Temuan tersebut sejalan dengan prinsip dasar pengaturan sinyal lalu lintas. FHWA menjelaskan bahwa startup lost time adalah waktu tambahan pada awal fase hijau yang dibutuhkan kendaraan pertama dalam antrean untuk bereaksi dan mulai bergerak, dan nilai ini umumnya diasumsikan sekitar 2 detik; FHWA juga menyebut total lost time per fase sebesar 4 detik sebagai nilai baku dalam estimasi kapasitas. Dengan demikian, peningkatan jumlah kendaraan dan panjang antrian secara alami akan meningkatkan kebutuhan waktu hijau agar pelepasan antrian tetap efektif [26]. Dari sisi perilaku kendaraan berat, literatur juga menunjukkan bahwa karakteristik pelepasan antrian tidak sama dengan mobil penumpang. Studi Ghanim dan Abu-Lebdeh pada kondisi oversaturated interrupted flow melaporkan bahwa headway kendaraan berat berbeda dari mobil penumpang, dan bahwa nilai PCE rata-rata sekitar 2,25 masih masuk akal untuk kondisi yang mereka teliti [27].
Secara metodologis, hasil ini juga selaras dengan kerangka fuzzy traffic signal control yang memandang pengendalian sinyal sebagai proses bertahap yang mencakup fuzzifikasi, inferensi, defuzzifikasi, dan aksi kontrol. Niittymäki menempatkan pendekatan fuzzy sebagai kerangka yang sesuai untuk sistem lalu lintas yang bersifat nonlinier dan berubah-ubah [28],[29].
Analisis sensitivitas dilakukan secara kualitatif dengan mengamati perubahan nilai greentime terhadap variasi masing-masing variabel masukan, yaitu jumlah kendaraan, panjang antrian, dan ukuran kendaraan.
Variabel jumlah kendaraan menunjukkan pengaruh yang signifikan terhadap peningkatan greentime, terutama pada kondisi antrian panjang. Sebagai contoh, pada panjang antrian 140 m dan ukuran kendaraan 3,5 m, peningkatan jumlah kendaraan dari 2 menjadi 28 kendaraan/lajur menyebabkan peningkatan greentime dari 21,13 detik menjadi 37,55 detik. Hal ini sejalan dengan konsep dasar kontrol lalu lintas bahwa peningkatan volume kendaraan akan meningkatkan kebutuhan waktu pelayanan pada fase hijau.
Variabel panjang antrian juga menunjukkan kontribusi yang konsisten terhadap peningkatan greentime. Pada jumlah kendaraan tetap (15 kendaraan/lajur) dan ukuran kendaraan 3,5 m, peningkatan panjang antrian dari 10 m menjadi 140 m meningkatkan greentime dari 6,70 detik menjadi 37,55 detik. Hal ini menunjukkan bahwa sistem FLC merespons kondisi akumulasi kendaraan secara langsung dalam menentukan durasi hijau.
Sementara itu, variabel ukuran kendaraan menunjukkan pengaruh yang relatif lebih non-linear dibandingkan dua variabel lainnya. Pada beberapa kondisi, peningkatan ukuran kendaraan menghasilkan lonjakan greentime yang cukup signifikan, khususnya pada kombinasi jumlah kendaraan dan panjang antrian yang tinggi. Hal ini dapat dikaitkan dengan fakta bahwa kendaraan dengan dimensi lebih besar cenderung memiliki waktu akselerasi lebih lambat dan membutuhkan ruang lebih besar, sehingga memengaruhi laju pengosongan antrian (queue discharge rate) dan start-up lost time, sebagaimana dibahas dalam literatur rekayasa lalu lintas seperti Highway Capacity Manual.
Meskipun demikian, respons keluaran belum sepenuhnya monoton. Pada beberapa kombinasi input, nilai greentime tetap berada pada nilai yang sama, seperti 45,00 detik, meskipun parameter masukan berbeda. Kondisi ini mengindikasikan adanya zona saturasi pada fungsi keanggotaan atau basis aturan yang digunakan. Karena itu, penyempurnaan fungsi keanggotaan dan struktur aturan masih diperlukan agar respons sistem menjadi lebih halus dan konsisten.
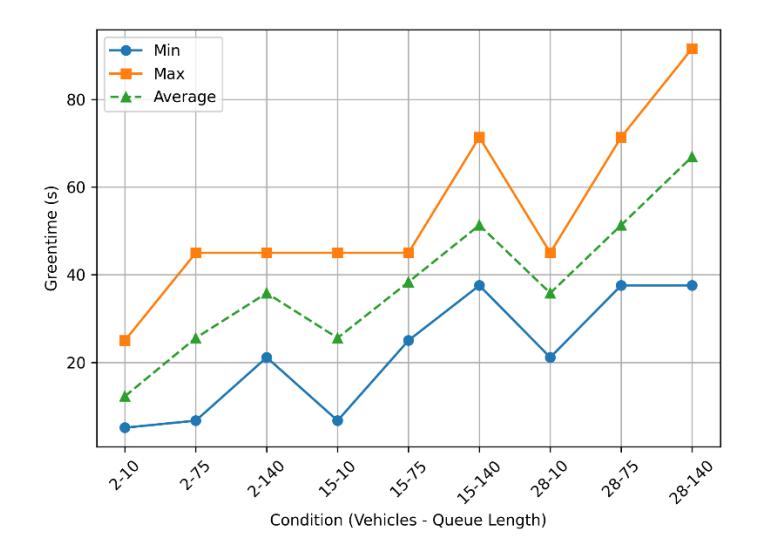
Gambar 5. Variasi nilai minimum, maksimum, dan rata-rata greentime pada setiap kombinasi jumlah kendaraan dan panjang antrian.
Sebagaimana ditunjukkan pada Gambar 5, terdapat perbedaan yang signifikan antara nilai minimum dan maksimum greentime pada setiap kondisi lalu lintas. Selisih ini cenderung meningkat pada kondisi dengan jumlah kendaraan dan panjang antrian yang lebih tinggi. Selain itu, kurva rata-rata berada di antara nilai minimum dan maksimum, yang secara indikatif merepresentasikan keluaran sistem tanpa mempertimbangkan variasi ukuran kendaraan.
Jika dibandingkan secara indikatif dengan pendekatan yang hanya menggunakan variabel makroskopis seperti panjang antrian dan waktu tunggu, hasil ini menunjukkan bahwa penambahan variabel ukuran kendaraan memperkaya sensitivitas model terhadap kondisi lalu lintas campuran. Pada kombinasi input yang sama, variasi ukuran kendaraan menghasilkan rentang greentime yang cukup lebar, misalnya pada 2 kendaraan/lajur dan antrian 10 m, nilai greentime berada pada rentang 5,09–25,00 detik, sedangkan pada 28 kendaraan/lajur dan antrian 140 m rentangnya meningkat menjadi 37,55–91,60 detik. Secara rata-rata, greentime juga meningkat seiring bertambahnya ukuran kendaraan, sehingga variabel jenis kendaraan berpotensi membantu mengurangi risiko representasi keputusan yang terlalu umum pada kondisi lalu lintas heterogen.
4 Kesimpulan
Penelitian ini menunjukkan bahwa pengintegrasian variabel jenis kendaraan bersama jumlah kendaraan dan panjang antrian ke dalam sistem Fuzzy Logic Controller (FLC) tipe Mamdani menghasilkan keluaran durasi lampu hijau yang responsif terhadap variasi kondisi lalu lintas campuran. Berdasarkan hasil simulasi, sistem menghasilkan durasi hijau pada rentang 5,09 hingga 91,60 detik sesuai perubahan beban lalu lintas. Variabel ukuran kendaraan juga memengaruhi keluaran sistem, dengan nilai rata-rata greentime sebesar 53,82 detik pada ukuran kendaraan 9,0 m dibandingkan 22,22 detik pada ukuran 3,5 m. Hasil ini menunjukkan bahwa variabel jenis kendaraan berkontribusi dalam memodulasi alokasi waktu hijau agar lebih representatif terhadap kondisi lapangan. Meskipun demikian, masih ditemukan zona saturasi pada beberapa kombinasi input yang menyebabkan respons keluaran belum sepenuhnya monoton. Oleh karena itu, penyempurnaan fungsi keanggotaan dan basis aturan masih diperlukan agar transisi respons sistem menjadi lebih halus dan konsisten pada berbagai kondisi antrian.
Ucapan Terima kasih
Penelitian ini dilakukan secara mandiri tanpa dibiayai oleh pihak lembaga atau institusi manapun.