
1 Pendahuluan
Alat bantu media pembelajaran digunakan untuk membantu mahasiswa memahami konsep dengan menggunakan bentuk terapan yang nyata. Media pembelajaran merupakan wahana penyalur pesan dan informasi belajar untuk membantu mahasiswa mencapai tujuan pembelajaran [1]. Dalam konteks sistem kontrol, keberadaan platform eksperimen sangat penting karena memungkinkan mahasiswa tidak hanya memahami teori, tetapi juga mengamati langsung respon sistem secara nyata. Namun demikian, platform pembelajaran sistem kontrol komersial umumnya memiliki biaya yang tinggi dan kurang fleksibel untuk digunakan secara luas dalam kegiatan praktikum.
Beberapa pendekatan telah dikembangkan untuk mengatasi keterbatasan tersebut, antara lain melalui penggunaan simulator, laboratorium jarak jauh, dan pengembangan perangkat keras berbiaya rendah [2]. Simulator seperti Matlab-Simulink atau LabVIEW merupakan perangkat lunak yang sangat baik untuk analisis dan perancangan sistem kontrol, namun kurang memberikan pengalaman langsung terhadap sistem nyata. Alternatif lain adalah laboratorium jarak jauh (remote laboratory), yang memungkinkan akses sistem nyata secara daring, tetapi memerlukan pengaturan jadwal akses dan interaksi langsung pengguna. Pendekatan
ketiga adalah pengembangan platform laboratorium berbasis perangkat keras berbiaya rendah, yang menjadi solusi menarik meskipun memiliki keterbatasan kinerja perangkat. Pengembangan media pembelajaran sistem kontrol berbiaya rendah secara mandiri dapat menjadi pilihan realistis, karena selain rendah biaya, juga memudahkan dalam perawatan dan perbaikan.
Berbagai penelitian telah mengembangkan media pembelajaran sistem kontrol dengan pendekatan yang berbeda. Penggunaan perangkat lunak berbasis GUI untuk analisis sistem kontrol PID telah dikembangkan pada [3], yang mampu meningkatkan pemahaman mahasiswa terhadap parameter dan tuning PID. Selain itu, platform pembelajaran berbasis animasi komputer juga dikembangkan pada [4], yang memungkinkan interaksi dengan model sistem secara visual. Namun demikian, kedua pendekatan tersebut belum melibatkan interaksi langsung dengan plant nyata.
Pengembangan platform berbasis plant nyata telah dilakukan, misalnya menggunakan motor DC untuk kontrol kecepatan dan posisi [2]. Sistem ini telah dilengkapi panduan pembelajaran yang sistematis, namun belum menyediakan visualisasi respon sistem secara langsung selama eksperimen berlangsung. Padahal, visualisasi ini penting untuk meningkatkan pemahaman mahasiswa terhadap dinamika sistem kontrol.
Aeropendulum merupakan salah satu plant yang efektif untuk pembelajaran sistem kontrol karena memungkinkan pengamatan langsung parameter kinerja seperti risetime, settling time, dan overshoot [5], [6], dan [7]. Sistem ini juga memungkinkan pemberian gangguan dengan menambahkan beban pada ujung pendulum (gangguan tetap) atau mendorong ujung pendulum (gangguan sementara), sehingga cocok untuk mempelajari disturbance rejection.
Aeropendulum yang sering digunakan adalah jenis pendulum yang mempunyai satu motor dengan balingbaling di salah satu ujung pendulumnya, sehingga pendulum dapat berayun akibat adanya gaya aerodinamik dari putaran baling-baling [8]. Jenis aeropendulum lain adalah balanced aeropendulum, yaitu aeropendulum yang memiliki dua motor dengan baling-baling pada kedua ujung pendulum, sehingga terkadang disebut juga aeropendulum twin-rotor. Dengan mengontrol gaya aerodinamik pada kedua baling-baling, maka sudut pendulum dapat dikontrol. Prinsip ini menjadi dasar pengontrolan Unmanned Aerial Vehicle (UAV) jenis Quadcopter. Bedanya, quad-copter memiliki empat baling-baling, sedangkan aeropendulum twin-rotor hanya dua baling-baling. Sehingga perangkat ini disebut juga dengan istilah half-quadcopter.
Aeropendulum satu motor sebagai plant nyata untuk pembelajaran sistem kontrol telah digunakan dibeberapa penelitian [5],[6],[7], dan [9]. Namun demikian, mahasiswa tidak mudah mencari contoh aplikasi dalam kehidupan yang sesuai dengan aeropendulum tersebut. Berbeda halnya apabila digunakan aeropendulum twin-rotor (half-quadcopter) yang mudah diasosiasikan sebagai dasar kontrol UAV quadcopter. Selain itu, penggunaan sensor berbasis potensiometer memiliki keterbatasan akibat gesekan mekanik yang dapat mengurangi keawetan sensor.
Terkait pengontrol untuk sistem aeropendulum, beberapa literatur menggunakan metode kontrol yang beragam. Misalnya, pada [9],10],[11], dan [12] menggunakan pengontrol PID, sedangkan pada [8],[13], [14] digunakan pengontrol fuzzy-PID. Sementara itu, pada [15] diterapkan fuzzy logic controller. Selain itu, penerapan Takagi-Sugeno fuzzy controller terdapat pada [16], serta adaptif fuzzy controller pada [17] dan [18].
Berdasarkan tinjauan tersebut, terdapat beberapa permasalahan pada platform pembelajaran sistem kontrol yang ada, yaitu: (1) kurangnya integrasi antara plant nyata dan visualisasi respon sistem, (2) keterbatasan representasi sistem terhadap aplikasi nyata seperti UAV, dan (3) keterbatasan keawetan sensor akibat penggunaan komponen mekanik. Selain itu, metode pengendalian yang digunakan umumnya berbasis PID, yang memerlukan model matematis yang cukup akurat dan kurang fleksibel dalam menangani nonlinieritas sistem. Di sisi lain, beberapa penelitian menunjukkan bahwa metode kontrol alternatif seperti fuzzy logic controller (FLC) mampu memberikan kinerja yang baik dalam menangani sistem nonlinier.
Oleh karena itu, penelitian ini bertujuan untuk merancang dan mengembangkan sistem aeropendulum twinrotor berbasis half-quadcopter sebagai media pembelajaran sistem kontrol yang terintegrasi dengan fuzzy logic controller serta dilengkapi dengan visualisasi respon sistem. Sistem yang dikembangkan diharapkan dapat menjadi alternatif platform pembelajaran yang interaktif, ekonomis, dan representatif terhadap aplikasi nyata sistem kontrol. Selanjutnya, makalah ini disusun dengan memaparkan metode perancangan sistem, implementasi, serta hasil pengujian dan analisis kinerja sistem.
2 Metode
2.1 Perancangan Sistem
Dalam perancangan suatu sistem dibutuhkan suatu blok diagram yang dapat menjelaskan kerja sistem secara keseluruhan. Gambar 1 menunjukkan diagram blok fungsional sistem aeropendulum half-quadcopter. Diagram blok sistem kontrol dengan metode pengontrol fuzzy logic ditunjukkan oleh Gambar 2.
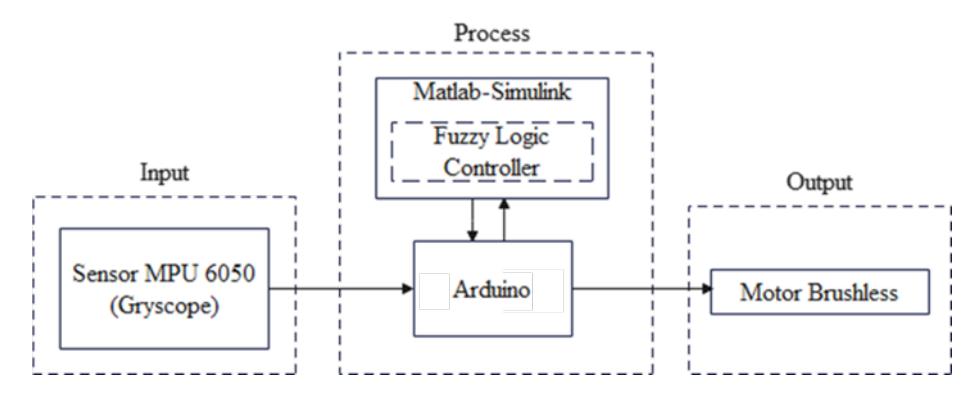
Gambar 1. Diagram blok fungsional sistem aeropendulum half-quadcopter.
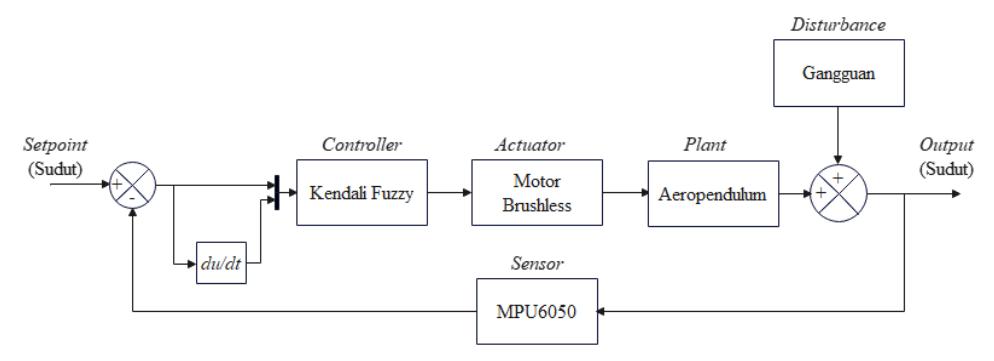
Gambar 2. Diagram blok sistem kontrol fuzzy logic pada aeropendulum half-quadcopter.
Rancangan mekanik aeropendulum half-quadcopter dengan fuzzy logic ini ditunjukkan pada Gambar 3.
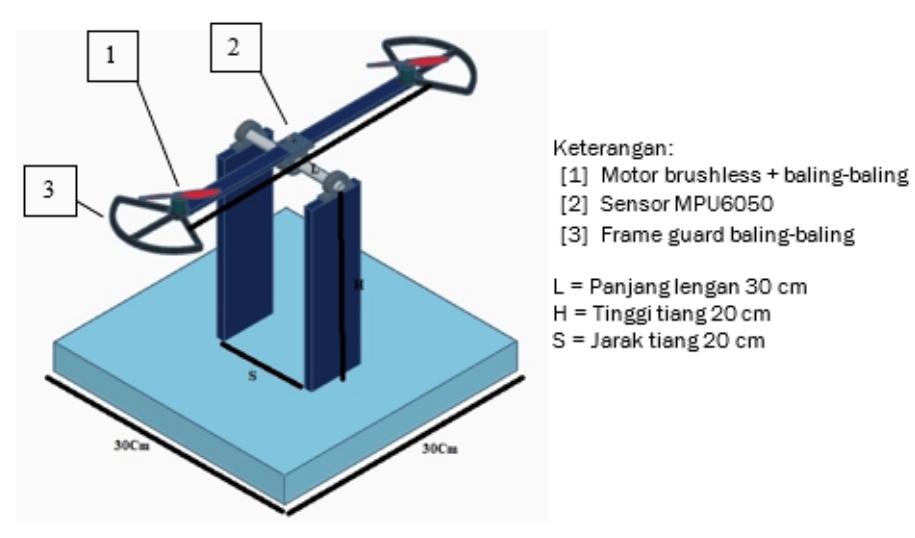
Gambar 3. Rancangan mekanik.
Komponen/modul elektronika pada sistem ini terdiri dari mikrokontroler Arduino, sensor IMU MPU6050 yang terhubung dengan Arduino melalui interface I2C. Aktuator yang digunakan adalah 2 buah motor brushless jenis A2212 1000KV dilengkapi dengan Electronic Speed Controller (ESC) 30A. Pada motor dipasang balingbaling dengan ukuran diameter 5". Sumber daya sistem menggunakan modul switching power supply 12V 20A untuk motor brushless dan daya port USB untuk modul Arduino. Diagram pengkabelan ditunjukkan oleh Gambar 4.
Gambar 4. Diagram pengkabelan komponen/modul elektronik.
Hasil perancangan mekanik dan elektronik di atas kemudian diwujudkan menjadi sebuah prototipe aeropendulum twin-rotor ditunjukkan pada Gambar 5. Komponen-komponen yang digunakan diletakkan di tengah alat untuk meminimalisir gangguan terhadap kerja pendulum dan baling-baling. Sebagai komponen mekanik digunakan akrilik sebagai case (base), dan tambahan lainnya untuk meletakkan komponen sistem seperti batang as, linear bearing, lengan pendulum dan lain-lain.
Gambar 5. Prototipe Aero Pendulum Twin-Rotor (Half-Quadcopter).
2.2 Perancangan Diagram Blok Simulink
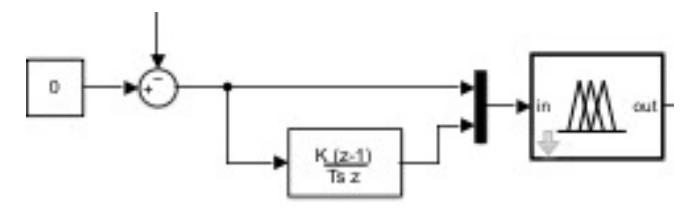
Diagram blok Simulink terdiri dari tiga bagian utama, yaitu bagian Input, Controller, dan Output. Masingmasing bagian memiliki fungsi spesifik yang saling mendukung untuk mencapai tujuan sistem secara keseluruhan. Program blok Simulink sistem secara keseluruhan diperlihatkan pada Gambar 6. Blok input dapat dilihat lebih jelas pada Gambar 7, blok controller pada Gambar 8 sedangkan blok output ditunjukkan pada Gambar 12.
Gambar 6. Diagram blok Simulink.
Pada bagian Input, terdapat blok untuk membaca data sudut dari sensor MPU6050. Data dari sensor MPU6050 diambil melalui dua input yaitu kecepatan sudut (gyroscope) dan percepatan linear (accelerometer). Data gyroscope diintegrasikan terhadap waktu untuk menghitung perubahan sudut, namun sebelum itu perlu dilakukan menghilangkan bias pada sensor untuk memastikan data gyroscope yang akurat dengan cara melihat nilai rata-rata yang didapatkan dari sensor MPU6050 selama diam dengan sumbu x dari gyroscope (x_velocity). Maka dari hasil rata-rata tersebut ditambahkan pada output blok x_velocity. pada sensor MPU6050 yang digunakan pada sistem ini nilai konstanta yang diperoleh yaitu 179 yang ditambahkan dengan hasil x_velocity.
Setelah data diperoleh dari sensor, blok double digunakan untuk memastikan bahwa data memberikan akurasi yang lebih tinggi maka diolah dalam tipe data double. Kemudian dilakukan perhitungan dikalikan dengan 90/12000 yang berfungsi untuk men-scaling pembacaan sensor dengan perbandingan antara sudut sistem yaitu 90º dan hasil pembacaan x_velocity ketka digerakkan ke 90º yaitu 12000. Dan pada data accelerometer diubah tipe data double digunakan dalam fungsi atan2 untuk menghitung sudut berdasarkan percepatan pada sumbu y dan z, kemudian hasilnya dikonversi dari radian ke derajat dengan mengalikan 180/π(3.14).
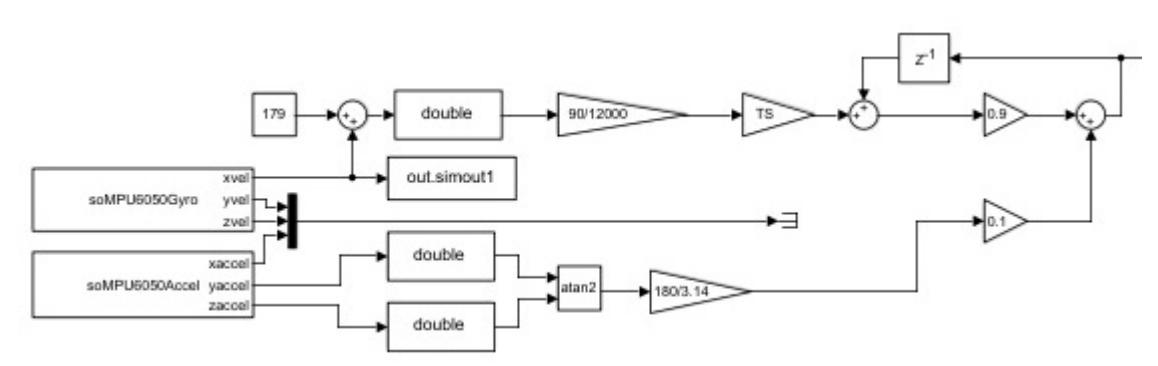
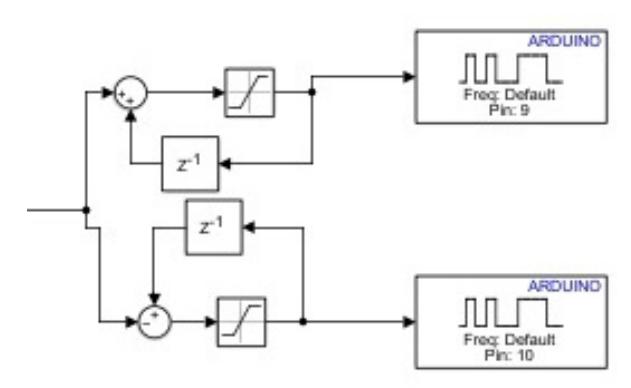
Gambar 7. Blok Simulink input dan complementary filter.
Hasil dari gyroscope dan accelerometer digabungkan menggunakan complementary filter (lihat Gambar 7), dengan bobot yang lebih besar diberikan pada data gyroscope (0.9) dan bobot yang lebih kecil pada data accelerometer (0.1), untuk menghasilkan sudut akhir yang lebih stabil dan akurat. Blok memori z^-1 ditambahkan untuk mengurangi noise dan menjaga stabilitas hasil akhir. Kombinasi ini memungkinkan pengukuran sudut yang lebih andal dengan memanfaatkan kelebihan masing-masing sensor yaitu gyroscope memberikan respons cepat terhadap perubahan orientasi tanpa terpengaruh oleh getaran, sedangkan accelerometer memberikan informasi yang lebih handal dalam jangka panjang karena tidak mengalami drift.
Sistem diimplementasikan dengan waktu sampling sebesar 10 ms (100 Hz), yang digunakan sebagai periode pembacaan sensor dan pembaruan sinyal kontrol pada mikrokontroler. Pemilihan waktu sampling ini mempertimbangkan keseimbangan antara kecepatan respon sistem dan keterbatasan komputasi pada mikrokontroler.
Data yang dihasilkan oleh sensor ini kemudian akan diproses lebih lanjut pada bagian berikutnya, yaitu Controller ditunjukkan pada Gambar 8. Pada bagian Controller, terdapat blok Fuzzy Logic Controller (FLC), yang berfungsi sebagai pengendali utama dalam sistem. Fuzzy Logic Controller menggunakan prinsip-prinsip logika fuzzy untuk menangani ketidakpastian dan variasi dalam data sensor, sehingga mampu menghasilkan respons yang lebih adaptif dan akurat. Dalam konteks ini, pengendali ini akan mengambil data error dan delta error dari sensor MPU6050 dan nilai setpoint kemudian memprosesnya untuk menghasilkan keputusan pengendalian yang sesuai.
Gambar 8. Blok Simulink controller.
Parameter FLC ditentukan berdasarkan karakteristik sistem aeropendulum dan referensi pada penelitian sebelumnya [19]. Fungsi keanggotaan (membership function) pada FLC yang diterapkan dalam sistem ini berbentuk segitiga (triangular), ditunjukkan pada Gambar 9, Gambar 10, dan Gambar 11. Terdapat 3 variabel, yaitu 2 variabel input Error dan Delta Error (ΔE), sedangkan untuk output terdapat 1 variabel yaitu pwm. Jumlah fungsi keanggotaan pada setiap variabel dipilih sebanyak 5, yaitu NL (negative long), NS (negative small), ZE (zero), PS (positive small), dan PL (positive long) untuk memberikan keseimbangan antara kompleksitas sistem dan sensitivitas respon. Rentang variabel input Error ditetapkan antara -90° hingga 90° dan Delta Error antara -60° hingga 60° sesuai dengan batas operasional sudut sistem pendulum. Output FLC yaitu variabel pwm, memiliki rentang -1 hingga 1 yang merepresentasikan perubahan relatif terhadap sinyal kontrol (pwm) sebelumnya.
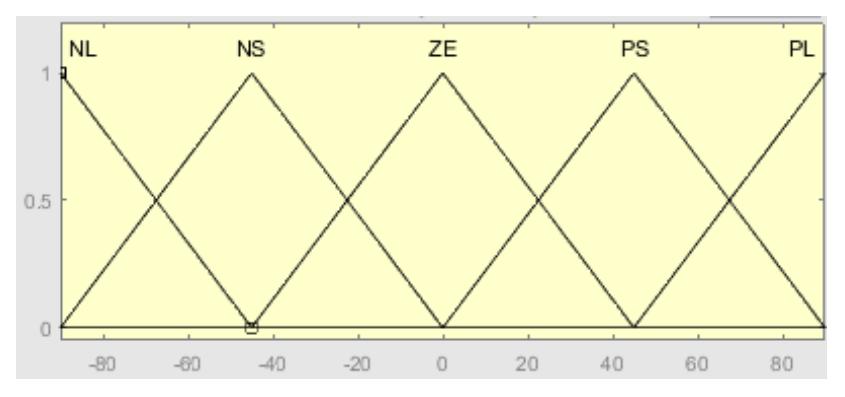
Gambar 9. Membership function input Error.
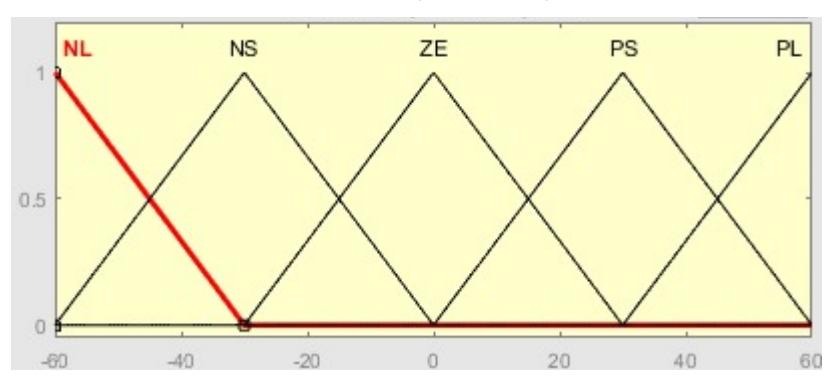
Gambar 10. Membership function input Delta Error.
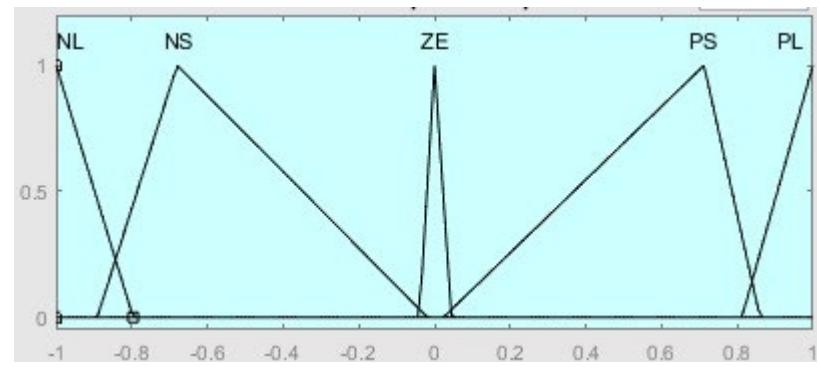
Gambar 11. Membership function output.
Dengan menggunakan rule base atau basis aturan IF-THEN metode implikasi MIN yang kemudian hasil dari setiap aturan fuzzy diagregasikan menggunakan metode MAX, maka matriks rule base dirancang berdasarkan prinsip dasar pengendalian fuzzy yang dijelaskan pada [19] vxcb, dengan beberapa penyesuaian untuk mengakomodasi dinamika sistem aeropendulum twin-rotor, ditunjukkan pada Tabel 1.
| E ΔE | NL | NS | ZE | PS | PL | |
|---|---|---|---|---|---|---|
| PL | ZE | PS | PL | PL | PL | |
| PS | NS | ZE | PS | PL | PL | |
| ZE | NL | NS | ZE | PL | PL | |
| NS | NL | NS | NS | PS | PS | |
| NL | NL | NL | NL | ZE | ZE | |
Tabel 1. Matriks Rule Base
Proses tuning FLC dilakukan secara trial-and-error dengan mempertimbangkan respon sistem terhadap perubahan setpoint dan gangguan. Parameter yang disesuaikan meliputi bentuk dan rentang fungsi keanggotaan serta aturan pada rule base, sehingga diperoleh kompromi terbaik antara kecepatan respon dan kestabilan sistem.
Selanjutnya, pada bagian Output, terdapat blok yang digunakan untuk mengimplementasikan hasil dari controller tersebut, yaitu blok PWM (Pulse Width Modulation) motor, sesuai Gambar 12. Blok ini digunakan untuk mengatur kecepatan motor berdasarkan keputusan yang dihasilkan oleh Controller. Adapun blok saturation berfungsi untuk membatasi kecepatan motor dan dengan men-delay (menyimpan) nilai PWM motor untuk ditambahkan atau dikurangi dari controller untuk mengatur kecepatan motor.
Gambar 12. Blok Simulink output.
3 Hasil dan Diskusi
3.1 Pengujian Sensor MPU6050
Pengujian dilakukan dengan membandingkan hasil pembacaan dari sensor MPU6050 dengan hasil pengukuran sudut yang diukur menggunakan busur derajat. Untuk meningkatkan akurasi dan kemudahan, pengukuran sudut manual dengan busur derajat digantikan dengan aplikasi pengukuran sudut di Android ditunjukkan pada Gambar 13. Langkah ini bertujuan untuk memastikan bahwa data yang diperoleh dari sensor MPU6050 sesuai dengan pengukuran sudut yang lebih stabil dan akurat. Gambar 14 menunjukkan salah satu pembacaan data sensor MPU6050.
Gambar 13. Pembacaan sudut dengan busur derajat.
Tampak pada Gambar 13 aeropendulum diatur posisinya menuju ke 0º atau posisi seimbang oleh aplikasi Android sebagai pengganti busur derajat untuk pengukuran sudut di hardware. Grafik hasil pembacaan sudut dari hardware pada tampilan Matlab ditunjukkan oleh Gambar 14.
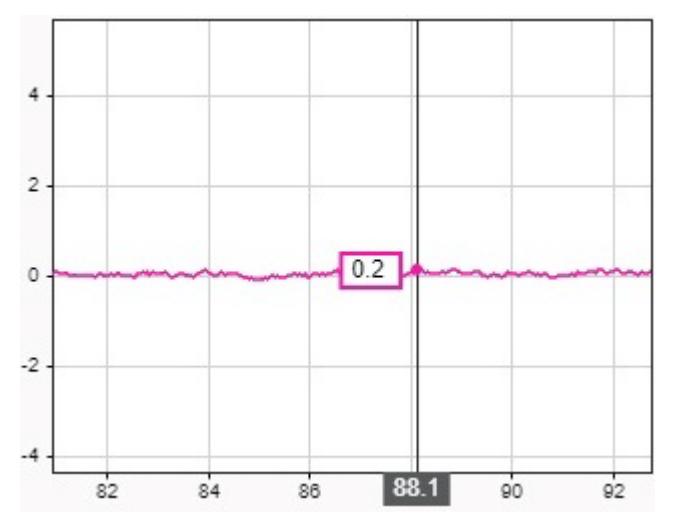
Gambar 14. Grafik hasil pembacaan MPU6050.
Hasil pembacaan sensor MPU6050 pada Gambar 14 menunjukkan posisi 0º yaitu 0,2º dalam hal ini pembacaan sensor stabil dan akurat dengan pembacaan sudut secara langsung dari sistem. Tabel 2 menunjukkan hasil pengujian sensor MPU6050 terhadap sudut actual menggunakan busur derajat (aplikasi Android).
Tabel 2. Data pengujian sensor MPU6050
| Sensor MPU6050 | Error |
| 45,32 º | 0,71% |
| 14,96 º | 0,27% |
| 10,06º | 0,6% |
| 0,3º | 0,2% |
| -9,96º | 0,4% |
| -15,13º | 0,87% |
| -45,06º | 0,13% |
Pengujian pembacaan sudut oleh sensor MPU6050 pada Tabel 2 dengan rata-rata error 0,45% menunjukkan bahwa sensor memiliki tingkat akurasi yang baik, sehingga sensor dapat diandalkan untuk pembacaan sudut pada sistem.
3.2 Pengujian Sistem Kontrol
Pengujian dilakukan dengan cara menggerakkan aeropendulum untuk melihat respon sistem melalui pembacaan sudut oleh MPU6050 dan dibandingkan dengan setpoint.
3.2.1 Pengujian dengan Setpoint Tetap
Hasil pengujian sistem aeropendulum dengan setpoint tetap pada 0º ditunjukkan pada Gambar 15. Pada grafik ini, terdapat dua kurva yang menggambarkan respons sistem. Garis biru, yang hampir datar, mewakili setpoint yang tetap pada nilai 0º, menunjukkan bahwa target posisi dari aeropendulum adalah nol atau posisi stabil tanpa penyimpangan.
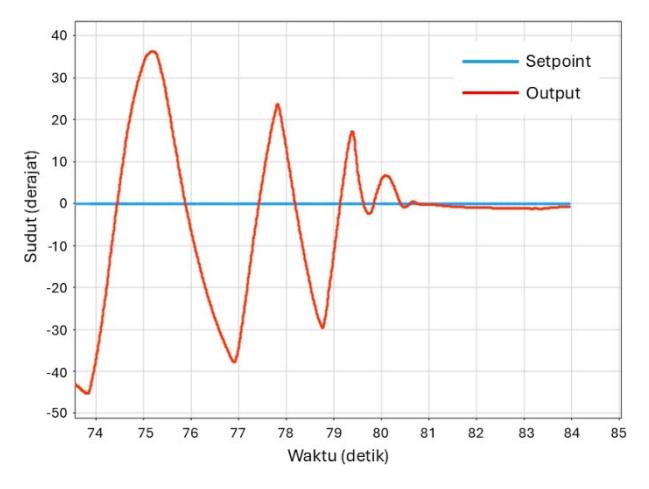
Gambar 15. Respon sistem terhadap setpoint 0º.
Sementara itu, kurva merah menggambarkan respon sistem terhadap setpoint tersebut setelah melewati complementary filter. Pada awal grafik, terlihat bahwa sistem mengalami osilasi yang cukup signifikan dengan amplitudo yang besar sebelum akhirnya meredam secara bertahap mendekati setpoint yang diinginkan. Osilasi ini mengindikasikan bahwa sistem membutuhkan waktu untuk menstabilkan diri, di mana respon terhadap perubahan posisi membutuhkan beberapa siklus osilasi sebelum mencapai keadaan stabil. Pada akhirnya, kurva mendekati nol, yang menunjukkan bahwa sistem berhasil mencapai stabilitas dan sesuai dengan setpoint yang diinginkan setelah waktu tertentu.
Pada Gambar 16, hasil pengujian lainnya sistem aeropendulum dengan setpoint tetap pada 30º. Pada grafik ini, dua kurva juga terlihat, di mana garis biru yang datar menunjukkan setpoint sistem yang diatur pada nilai 30º, yang berarti target posisi aeropendulum adalah pada nilai tersebut.
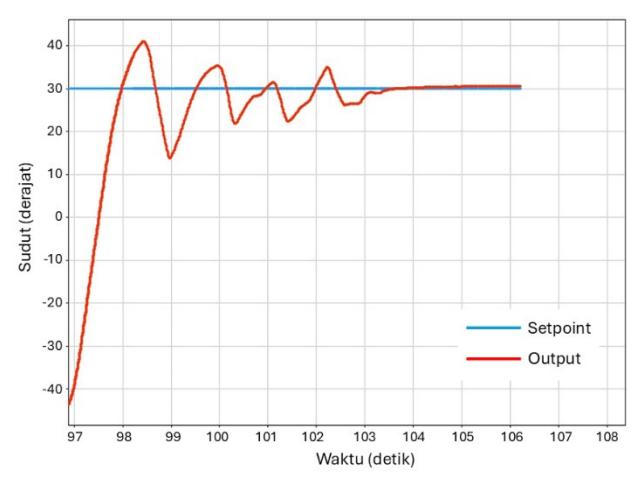
Gambar 16. Respon sistem terhadap setpoint 30º.
Kurva merah menunjukkan respons sistem setelah melewati complementary filter. Pada awal grafik, terlihat bahwa sistem mengalami osilasi besar yang cukup signifikan dengan amplitudo tinggi dan rendah, menandakan bahwa sistem mencoba mencapai setpoint yang ditentukan. Osilasi ini menurun secara bertahap seiring waktu, tetapi masih menunjukkan beberapa variasi sebelum akhirnya mulai mendekati stabilitas di sekitar nilai setpoint yang diinginkan.
Pada bagian akhir kurva, respons sistem mulai lebih stabil dengan fluktuasi yang semakin kecil, yang menandakan bahwa sistem telah mulai mencapai posisi yang mendekati setpoint 30º meskipun masih terdapat sedikit osilasi. Ini menunjukkan bahwa aeropendulum pada kondisi ini memerlukan waktu untuk menstabilkan diri di sekitar setpoint yang diinginkan, dan meskipun berhasil mendekati target, masih terdapat beberapa overshoot dan undershoot dalam prosesnya.
3.2.2 Pengujian dengan Setpoint Berubah
Hasil pengujian dengan setpoint berubah diperlihatkan pada Gambar 17. Pada grafik ini terlihat respon sistem aeropendulum terhadap perubahan setpoint yang signifikan. Garis biru menunjukkan setpoint, yang awalnya berada pada 0º, kemudian meningkat secara tiba-tiba ke nilai yang lebih tinggi sekitar 30º karena adanya perubahan setpoint yang digunakan. Sistem, yang diwakili oleh garis merah, merespons perubahan setpoint ini dengan pola osilasi yang cukup signifikan.
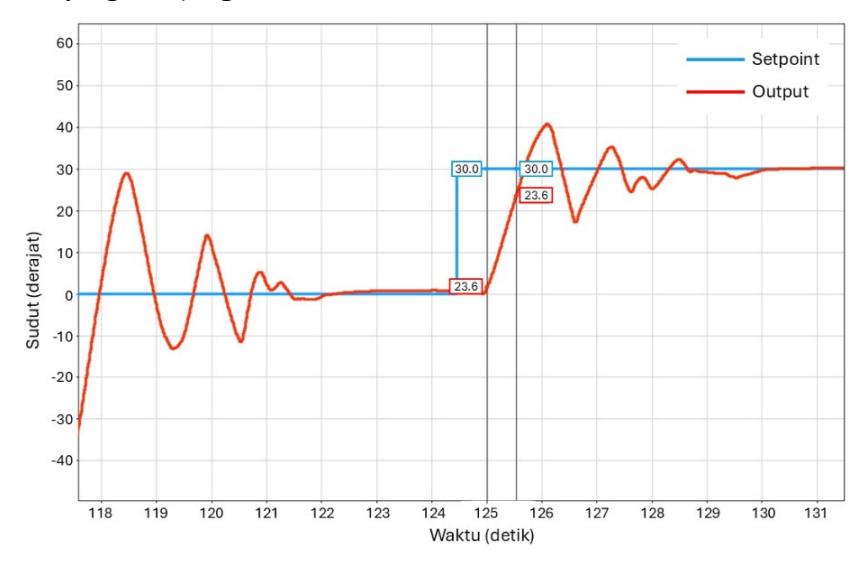
Gambar 17. Respon sistem terhadap setpoint yang berubah dari 0º ke 30º.
Setelah setpoint berubah, sistem mengalami overshoot yang cukup besar, di mana respons melonjak di atas setpoint yang baru, diikuti dengan serangkaian osilasi yang terjadi sebelum sistem akhirnya mulai mendekati stabilitas. Fluktuasi atau osilasi ini menunjukkan bahwa sistem membutuhkan waktu untuk menyesuaikan diri terhadap perubahan setpoint dan untuk mengatasi dampak dari perubahan mendadak ini.
Pada akhirnya, sistem mulai stabil dan mengikuti nilai setpoint yang baru dengan osilasi kecil yang terus berkurang seiring waktu. Pola ini menunjukkan bahwa sistem aeropendulum memiliki sifat yang cenderung over-responsive terhadap perubahan setpoint, yang bisa menjadi fokus penting dalam pengaturan parameter kontrol untuk meminimalkan overshoot dan mempercepat waktu pemulihan.
Berdasarkan grafik respon sistem pada Gambar 17, dapat diperoleh parameter respon waktu sistem sebagai hasil pengujian, yaitu rise time, settling time, maximum overshoot, dan error steady state. Parameter respon sistem hasil pengujian ditunjukkan pada Tabel 3.
Tabel 3. Parameter respon sistem
| Parameter | Nilai |
| Rise time, tr | 0.5 s |
| Settling time, ts | 5.8 s |
| Maximum overshoot, Mp | 21.3 % |
| Error steady-state, ess | 0.2 % |
Nilai overshoot sebesar 21,3% dan settling time 5,8 detik menunjukkan bahwa sistem masih memiliki respon transien yang relatif besar. Hal ini dipengaruhi oleh parameter pengendali fuzzy, khususnya pada proses pemetaan output FLC ke sinyal PWM yang menentukan tingkat agresivitas sistem. Meskipun demikian, sistem tetap menunjukkan kestabilan yang baik dengan error steady-state yang kecil. Optimalisasi lebih lanjut terhadap parameter FLC, seperti penyesuaian fungsi keanggotaan, berpotensi meningkatkan performa sistem.
Dibandingkan dengan metode PID yang umum digunakan pada sistem aeropendulum, pendekatan Fuzzy Logic Controller (FLC) memiliki keunggulan dalam menangani nonlinieritas sistem tanpa memerlukan model matematis yang presisi. Namun demikian, pengendali PID dapat memberikan performa yang lebih optimal apabila dilakukan proses tuning yang tepat, seperti yang telah dilakukan pada [12]. Oleh karena itu, perbandingan eksperimental antara FLC dan PID menjadi menarik untuk dikaji lebih lanjut pada penelitian berikutnya.
3.2.3 Pengujian Terhadap Gangguan
Pengujian gangguan dilakukan dengan memberikan gangguan eksternal secara manual pada sistem untuk mengamati kemampuan disturbance rejection. Meskipun metode ini menunjukkan respons sistem secara kualitatif, pendekatan ini memiliki keterbatasan dalam hal kuantifikasi dan repetabilitas. Oleh karena itu, penggunaan beban eksternal yang terukur direkomendasikan pada penelitian selanjutnya untuk memperoleh hasil pengujian yang lebih konsisten.
Hasil pengujian sistem aeropendulum dengan setpoint tetap dan adanya gangguan yang diberikan ke sistem ditunjukkan pada Gambar 18. Garis biru yang datar menggambarkan setpoint sistem yang diatur pada nilai 0º, yang menunjukkan bahwa target posisi aeropendulum adalah nol, atau dalam keadaan stabil tanpa penyimpangan. Kurva merah menggambarkan respons sistem terhadap setpoint ini setelah melewati complementary filter. Pada awal grafik, terdapat beberapa osilasi yang menunjukkan respons awal sistem terhadap gangguan yang muncul. Setelah itu, sistem tampaknya berusaha kembali ke setpoint dengan beberapa kali perbaikan yang diindikasikan oleh puncak-puncak osilasi yang lebih kecil, namun masih terdapat osilasi besar yang menunjukkan bahwa gangguan tersebut mengakibatkan fluktuasi signifikan dalam respons sistem.
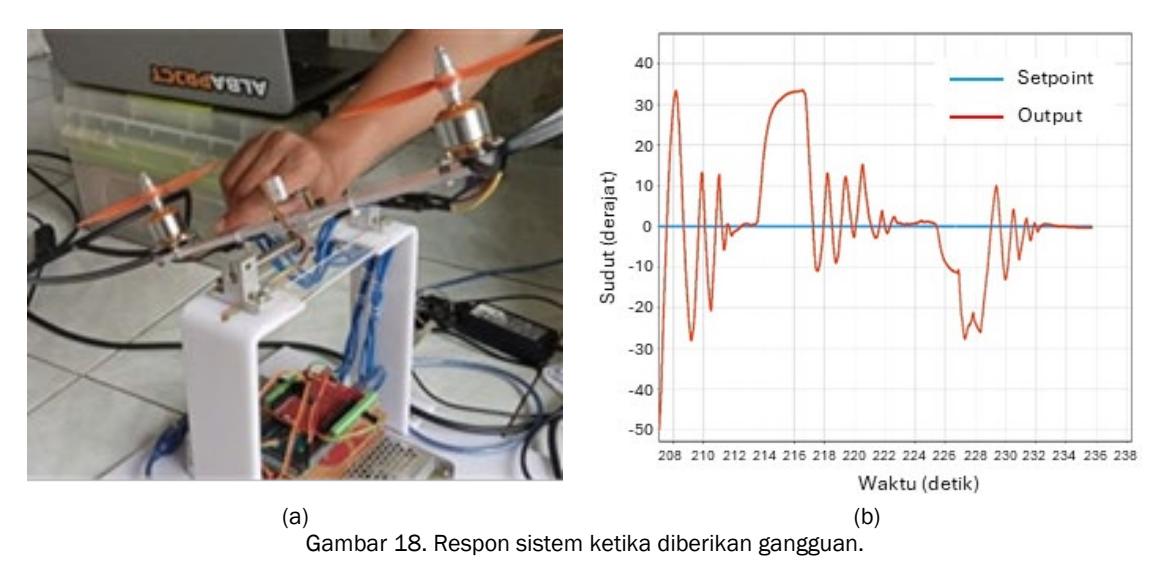
Pada bagian tengah grafik, respons sistem menunjukkan perubahan yang lebih besar akibat adanya gangguan eksternal, dengan puncak osilasi yang sangat tinggi diikuti oleh penurunan tajam, yang mungkin mencerminkan adanya gangguan besar yang menyebabkan sistem menyimpang jauh dari setpoint. Sistem mencoba untuk mengembalikan posisi ke setpoint, tetapi masih menunjukkan beberapa osilasi besar. Di bagian akhir grafik, respons sistem mulai stabil mendekati setpoint, meskipun masih terdapat beberapa fluktuasi kecil. Hal ini menunjukkan bahwa sistem memerlukan waktu dan beberapa kali penyesuaian untuk dapat kembali mendekati posisi setpoint setelah terganggu, meskipun gangguan menyebabkan penyimpangan yang cukup besar.
Secara keseluruhan, grafik ini menunjukkan bagaimana sistem aeropendulum bereaksi terhadap gangguan. Sistem menunjukkan karakteristik dinamis yang kuat di mana ia berusaha untuk mengoreksi dirinya sendiri setelah mengalami gangguan, meskipun proses ini melibatkan sejumlah osilasi sebelum mencapai stabilitas relatif di sekitar nilai setpoint yang diinginkan.
Meskipun respon sistem masih menunjukkan overshoot yang relatif besar, hasil penelitian ini tetap menunjukkan kontribusi dalam pengembangan media pembelajaran sistem kontrol. Platform yang dikembangkan tidak hanya mampu merepresentasikan sistem nyata melalui aeropendulum twin-rotor, tetapi juga mengintegrasikan sensor non-mekanik, pemrosesan sinyal berbasis complementary filter, serta visualisasi respon sistem. Selain itu, penggunaan fuzzy logic controller memungkinkan implementasi pengendalian tanpa memerlukan model matematis yang kompleks. Hal ini menunjukkan bahwa tujuan utama
penelitian, yaitu pengembangan platform pembelajaran sistem kontrol berbasis plant nyata, telah tercapai dengan baik, meskipun masih terdapat ruang untuk peningkatan performa kendali melalui optimasi parameter lebih lanjut.
4 Kesimpulan
Berdasarkan hasil pengujian, sensor MPU6050 metode complementary filter untuk pengukuran sudut dari sistem aeropendulum menunjukkan akurasi dengan rata-rata error sebesar 0.45%. Implementasi Fuzzy Logic Controller (FLC) pada sistem dengan pengujian setpoint sudut 30º menunjukkan nilai parameter respon waktu sistem sebagai berikut: rise time (tr) 0.5s, settling time (ts) 5.8s, maximum overshoot (Mp) 21.3% dan Error Steady State (ESS) 0.2%. Sistem ini juga efektif dalam merespons gangguan, dengan karakteristik dinamis yang memungkinkan koreksi otomatis kembali ke nilai setpoint. Dengan menggunakan Matlab/Simulink maka perubahan rancangan controller dan visualisasi respon sistem kontrol dapat dilakukan dengan mudah. Hasil ini tidak hanya menunjukkan implementasi sistem kontrol pada platform aeropendulum, tetapi juga memberikan kontribusi dalam pengembangan media pembelajaran sistem kontrol.
Ucapan Terima kasih
Ucapan terimakasih ditujukan kepada Politeknik Caltex Riau yang telah memberi dukungan finansial terhadap penelitian ini.