
1 Pendahuluan
Pemantauan level permukaan air yang dilakukan secara manual seringkali menghadapi keterbatasan, terutama dalam mendeteksi perubahan ketinggian air secara real-time. Hal ini berpotensi menyebabkan keterlambatan dalam pengoperasian pompa yang dapat berujung pada banjir atau kerusakan lainnya, yang tentu saja berdampak buruk bagi lingkungan dan masyarakat [1],[2]. Fenomena banjir yang sering terjadi di daerah perkotaan menunjukkan bahwa keterlambatan deteksi dapat memperburuk dampak bencana tersebut, sehingga diperlukan pendekatan berbasis teknologi untuk meningkatkan kecepatan respons [3],[4]. Oleh karena itu, dibutuhkan sistem pemantauan yang lebih otomatis dan efisien [5]. Untuk itu, diperlukan sebuah simulator level permukaan air yang berfungsi untuk merepresentasikan perubahan ketinggian air secara dinamis. Sistem ini dapat mengatur debit air yang masuk dan keluar serta mengelola aliran air secara terkontrol, sehingga meminimalkan ketergantungan pada pengamatan manual yang dapat menimbulkan masalah serius jika perubahan level air tidak segera terdeteksi [6]. Dalam hal ini, penggunaan simulator membantu memantau perubahan kondisi level air secara lebih terstruktur dan responsif [7],[8]. Sistem monitoring berbasis Internet of Things (IoT) merupakan salah satu solusi yang dapat mengatasi keterbatasan pemantauan manual. Dengan memanfaatkan sensor ultrasonik dalam pengukuran jarak serta mikrokontroler untuk pemrosesan data, sistem ini memungkinkan pemantauan ketinggian air secara real-time dan akurat [9], [10],[11]. Penggunaan sensor jarak ultrasonik sendiri telah terbukti efektif pada berbagai aplikasi monitoring
lingkungan dan instrumentasi [12],[13],[14]. Integrasi mikrokontroler seperti ESP8266 dan ESP32 mendukung pemrosesan cepat dengan konsumsi daya rendah [15],[16],[17]. Penggunaan radar ultrasonik juga telah dikembangkan untuk meningkatkan akurasi pengukuran [18],[19]. Data dari sensor IoT lalu dikirimkan ke server pusat melalui komunikasi nirkabel [20],[21], untuk penyimpanan data historis dalam database InfluxDB, sehingga menghasilkan analisis tren dan monitoring jangka panjang [22],[23]. Integrasi ini menghasilkan pemantauan kondisi level air secara remote [24],[25]. Penelitian ini bertujuan untuk menganalisis dinamika perubahan level permukaan air dan merancang sistem monitoring berbasis IoT yang dapat memantau ketinggian air secara otomatis. Dengan menerapkan sistem ini pada simulator level permukaan air, diharapkan dapat dilakukan pengukuran ketinggian yang lebih cepat dan lebih tepat, dengan latensi rendah dan tingkat keandalan yang tinggi.
2 Metode Penelitian
2.1 Metode yang Digunakan
Metodologi penelitian ini adalah pengambilan data kuantitatif, penelitian ini dimulai dengan tahap perancangan sistem yang menggunakan sensor ultrasonik LV-MaxSonar EZ1 [20],[21] untuk mendeteksi ketinggian air, di mana data yang dihasilkan diolah oleh mikrokontroler Arduino-ESP32-S3-Nano. Mikrokontroler ini berfungsi untuk memproses dan mengirimkan data ke server melalui jaringan Wi-Fi secara real-time [4],[5],[7]. Pada tahap pengembangan perangkat keras, komponen seperti sensor, mikrokontroler, dan panel box dirancang dan dirakit dengan simulator berbentuk akuarium untuk merepresentasikan kondisi rumah pompa. Data hasil monitoring ditampilkan pada LCD TFT untuk kebutuhan pemantauan lokal [12]. Pengujian dilakukan untuk memastikan keandalan sistem, dimulai dari pengujian akurasi sensor dengan membandingkan hasil pengukuran sensor terhadap alat ukur standar, hingga pengujian sistem komunikasi data untuk mengukur waktu tunda pengiriman data ke server [6].
2.2 Alat dan Bahan
Komponen yang digunakan dalam pembuatan alat pada Tabel 1.
Tabel 1. Alat dan bahan
| No | Alat dan Bahan | Jumlah | Keterangan |
|---|---|---|---|
| 1 | Arduino-ESP32-S3-Nano | 1 buah | Mikrokontroler untuk pengolahan data dan kontrol sistem |
| 2 | Sensor Ultrasonik LV-MaxSonar EZ1 | 1 buah | Sensor untuk mendeteksi ketinggian air |
| 3 | LCD TFT | 1 buah | Layar untuk menampilkan informasi sistem |
| 4 | Wi-Fi Module (Built-in ESP32) | 1 unit | Modul komunikasi untuk mengirim data secara real-time |
| 5 | Panel Box | 1 buah | Kotak pelindung untuk melindungi komponen dari lingkungan luar |
| 6 | Simulator Akuarium | 1 buah | Simulasi kondisi rumah pompa dalam skala kecil |
| 7 | Kabel dan Konektor | 1 set | Untuk menyambungkan komponen dalam rangkaian |
| 8 | PCB | 1 buah | Digunakan sebagai rangkaian elektronik |
| 9 | Power Supply | 1 buah | Sumber daya listrik untuk menyuplai ESP32 dan komponen lainnya |
| 10 | Obeng kit | 1 buah | Alat-alat untuk perakitan dan perbaikan rangkaian |
| 11 | Baut | 1 buah | Alat-alat untuk perakitan dan perbaikan rangkaian |
| 12 | Tang | 1 buah | Alat-alat untuk perakitan dan perbaikan rangkaian |
3 Desain Alat Ukur Berdasarkan Perhitungan Hukum Kesetimbangan Massa
Berikut desain dari alat ukur monitoring level air pada simulator :
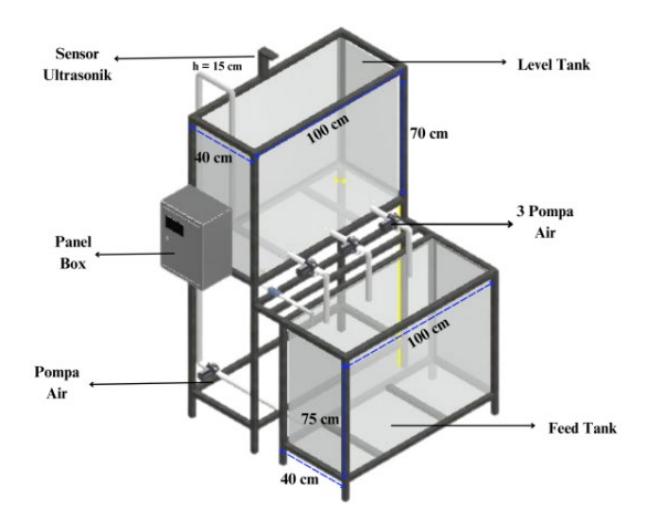
Gambar 1. Desain 3D
Dalam kondisi ini dapat dilihat dari tiga tingkatan air serta set point pompa yang akan menyala:
- a. Kondisi Normal:
- Tinggi air pada 22.5 cm
- Volume air pada 90 liter
- 1 Pompa menyala
- b. Kondisi Siaga:
- Tinggi air pada 45 cm
- Volume air pada 180 liter
- 2 Pompa menyala
- c. Kondisi Bahaya:
- Tinggi air pada 67.5 cm
- Volume air pada 270 liter
- 3 Pompa menyala
3.1 Perancangan Sistem
Pada perancangan sistem monitoring level air terdapat desain alat seperti pada Gambar 2.
Gambar 2. Perancangan sistem
Pada Gambar 2 merupakan perancangan sistem alat yang menggunakan beberapa komponen. Komponenkomponen tersebut diantara lain sensor, mikrokontroler, LCD, power supply dan sebagainya. Seluruh komponen tersebut dijadikan satu di dalam panel box.
3.2 Perancangan Hardware
Pada pembuatan sistem monitoring level air terdapat skema dan diagram blok pengukuran yang digunakan seperti Gambar 3.

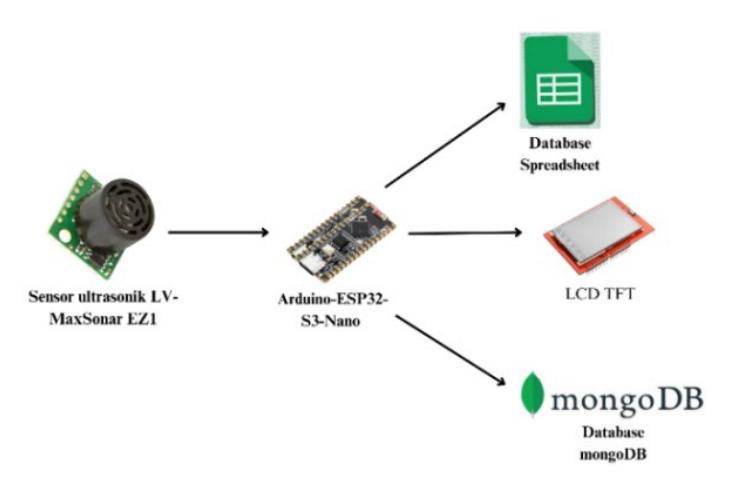
Gambar 3. Diagram blok pengukuran
Pada diagram blok pengukuran Gambar 3, input dari sistem monitoring berupa jarak air yang disensing oleh sensor ultrasonik LV Maxsonar EZ1. Hasil pembacaan dari masing-masing sensor akan dikirimkan ke pengondisian sinyal untuk diubah menjadi sinyal standar. Setelah sinyal tersebut menjadi sinyal standar, sinyal tersebut di transmisikan ke mikrokontroller Arduino ESP32-S3 nano untuk dikonversi menjadi satuan jarak yaitu centimeter. Setelah diproses, data akan ditampilkan melalui display lokal.
3.3 Pembuatan Hardware Alat
Perancangan pada alat monitoring level air sungai sesuai Gambar 4.
Gambar 4. Hardware alat ukur
4 Hasil dan Pembahasan
4.1 Penguijan Sensor Ultrasonik
Berikut ini merupakan hasil pengujian sensor ultrasonik sebagai pengukuran level air pada simulator. Pengujian dilakukan dengan cara membandingkan sensor ultrasonik dengan alat ukur yang terstandar yaitu meteran. Pengambilan data dilakukan dengan range pembacaan validator 16 cm sampai 60 cm.
Pengujian ini bertujuan untuk mengetahui kinerja sensor ultrasonik dalam memberikan hasil yang akurat dan konsisten dalam pengukuran simulator level air. Hasil pengujian menunjukkan bahwa sensor ultrasonik LV-MaxSonar EZ1 mampu memberikan hasil pengukuran yang serupa dengan alat ukur standar, dengan tingkat ketelitian dan keandalan yang memadai. Dengan demikian, hasil pengujian ini menunjukkan bahwa sensor ultrasonik LV-MaxSonar EZ1 dapat diandalkan untuk digunakan dalam sistem monitoring level yang dirancang, sehingga dapat memberikan informasi yang akurat tentang ketinggian air.
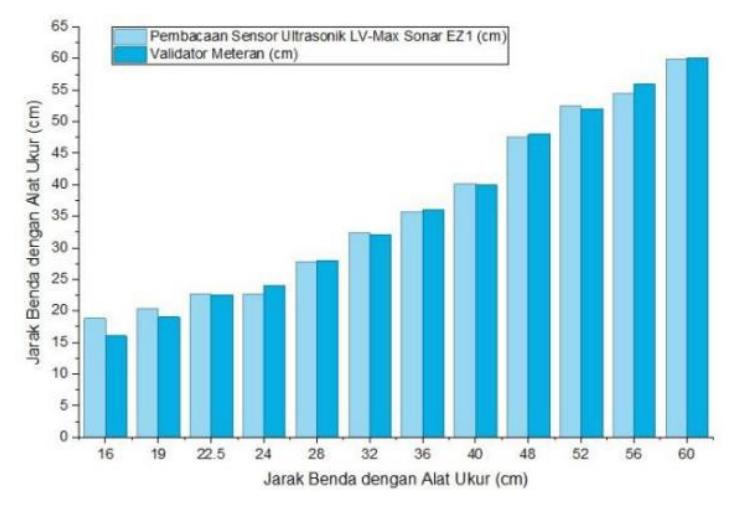
Gambar 5. Grafik pengujian sensor ultrasonik
Dari Gambar 5 pengujian di atas, menunjukkan bahwa perbandingan antara sensor dan validator menyatakan bahwa sensor ultrasonik yang telah di-scaling memiliki ketepatan pembacaan dan pengonversian yang baik dengan perhitungan yang akurat dengan persentase error 3.565% dari 60 pengambilan data percobaan. Akurasi sensor yang digunakan yaitu senilai 96.435%. Dengan demikian, dapat disimpulkan bahwa sensor ultrasonik LV-MaxSonar EZ1 ini memiliki tingkat akurasi yang cukup baik dengan nilai kesalahan kurang dari 3.6%.
4.2 Pengujian Sistem
Pada tahap pengujian dan pengambilan data ini, tujuannya adalah untuk mengevaluasi respons dan kinerja sistem alat yang akan dikembangkan. Pengujian sistem dilakukan dengan menyalakan alat pada kondisi waktu tertentu. Pengujian dilakukan sebanyak tiga kali sesuai kondisi yang telah ditentukan yaitu kondisi Normal, kondisi Siaga dan kondisi Bahaya.
Pengujian sistem pertama dalam kondisi Normal pada alat. Pengujian ini untuk melihat bagaimana alat ini bekerja dalam pembacaan ketika kondisi Normal. Pengujian ini dilakukan dengan memantau ketinggian air dan kondisi pada LCD, waktu pada database, dan delay. Data didapatkan seperti hasil pada Gambar 6.
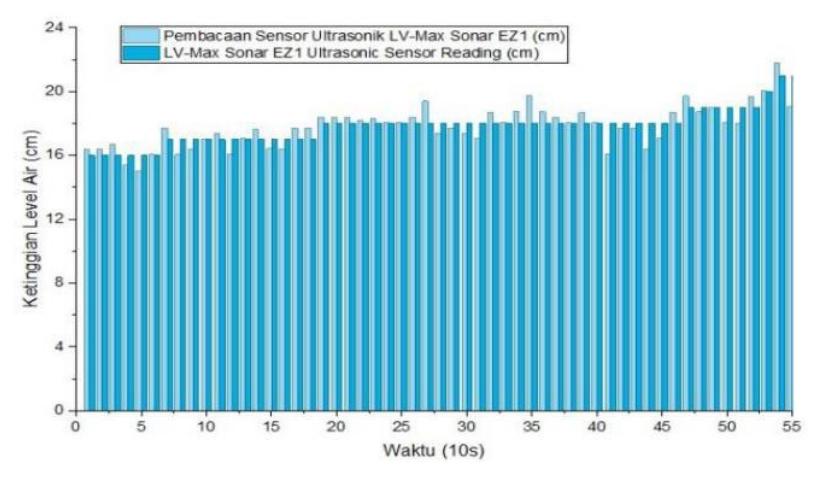
Gambar 6. Grafik pengujian sensor ultrasonik dalam kondisi Normal
Gambar 6 diatas adalah Pada pengujian dalam kondisi Normal pembacaan pertama, sensor membaca nilai 16.36 cm sementara validator menunjukkan 16 cm, menghasilkan error sebesar 0.36 cm dengan persentase error 2.25%. Hasil serupa terbaca pada pembacaan kedua. Selanjutnya, pembacaan ketiga menunjukkan nilai sensor 16.70 cm dibandingkan validator 16 cm, menghasilkan error sebesar 0.7 cm atau 4.38%. Pada pembacaan keempat, sensor membaca 15.37 cm dengan validator tetap 16 cm, menghasilkan error 0.63 cm (3.94%). Error tertinggi pada pembacaan validator pertama (16 cm) terjadi pada pembacaan kelima, di mana sensor membaca 15.04 cm dibandingkan validator 16 cm, dengan error 0.96 cm (6.00%). Sebaliknya, pembacaan keenam menunjukkan error terkecil, yakni hanya 0.04 cm atau 0.25%, saat sensor membaca 16.04 cm.
Kemudian, pada pembacaan ketujuh nilai sensor membaca 17.71 cm dibandingkan validator 17 cm menghasilkan error 0.71 cm (4.18%). Di sisi lain, pembacaan kedelapan menunjukkan nilai sensor membaca 16.04 cm dibandingkan validator 17 cm, menghasilkan error sebesar 0.96 cm (5.65%). Nilai error yang signifikan juga terlihat pada pembacaan ke-12 (5.59%) dan ke-13 (0.29%), dengan nilai sensor masing-masing membaca 16.05 cm dan 17.05 cm dibanding validator 17 cm. Pada data ke-20, nilai sensor membaca 18.38 cm menghasilkan error 0.38 cm (2.11%) terhadap validator 18 cm, sementara error terbesar dalam kelompok ini terjadi pada pembacaan ke-27, di mana nilai sensor membaca 19.4 cm dibandingkan validator 18 cm menghasilkan error 1.4 cm (7.78%).
Pada pembacaan akhir, seperti data ke-41, sensor membaca 16.04 cm dibandingkan validator 18 cm dengan error sebesar 1.96 cm (10.89%), mencerminkan error tertinggi dalam seluruh data. Sebaliknya, pembacaan ke-49 menunjukkan error terkecil, yakni hanya 0.02 cm (0.11%), ketika sensor membaca 19.02 cm terhadap validator 19 cm. Dari seluruh pengamatan, nilai error rata-rata adalah 3.38%, menunjukkan akurasi sensor sebesar 96.62%.
Pada pengujian sistem 2 ini dalam kondisi Siaga pada alat. Pengujian ini untuk melihat bagaimana alat ini bekerja dalam pembacaan ketika kondisi Siaga sesuai set-point. Pengujian ini dilakukan dengan memantau ketinggian air dan kondisi pada LCD, waktu pada database, dan delay. Data didapatkan seperti hasil pada Gambar 7.
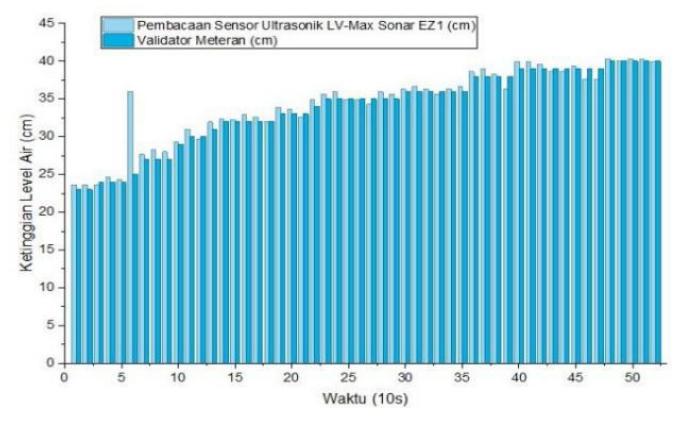
Gambar 7. Grafik pengujian sensor ultrasonik dalam kondisi Siaga
Grafik pada Gambar 7 diatas adalah pada pengujian dalam kondisi Siaga, pembacaan pertama sensor membaca nilai 23.67 cm, sementara validator menunjukkan 23 cm, menghasilkan error sebesar 0.67 cm dengan persentase error 2.91%. Pembacaan kedua menunjukkan hasil yang sama. Pada pembacaan ketiga, sensor membaca 23.65 cm terhadap validator 24 cm, menghasilkan error sebesar 0.35 cm atau 1.46%. Pada pembacaan keempat, nilai sensor adalah 24.65 cm dengan validator 24 cm, menghasilkan error 0.65 cm (2.71%). Error terkecil dalam kelompok ini terlihat pada pembacaan kelima, dengan nilai sensor 24.31 cm dibandingkan validator 24 cm, menghasilkan error sebesar 0.31 cm atau 1.29%.
Pada pembacaan keenam, terjadi pembacaan yang cukup jauh berbeda, di mana sensor membaca 35.97 cm terhadap validator 25 cm menghasilkan error sebesar 10.97 cm atau 43.88%, yang merupakan error tertinggi pada data ini. Selanjutnya, pembacaan ketujuh menunjukkan nilai sensor 27.65 cm dibandingkan validator 27 cm, menghasilkan error sebesar 0.65 cm (2.41%). Pada pembacaan kedelapan, sensor membaca 28.31 cm terhadap validator 27 cm menghasilkan error 1.31 cm (4.85%), sedangkan pada pembacaan kesepuluh, nilai sensor 29.31 cm dibandingkan validator 29 cm menghasilkan error terkecil dalam pengambilan data ini, yakni 0.31 cm (1.07%).
Pada pembacaan terakhir, sensor menunjukkan performa lebih stabil. Contohnya, pada pembacaan ke-49, nilai sensor adalah 40.05 cm dibandingkan validator 40 cm, menghasilkan error terkecil sebesar 0.05 cm (0.12%). Di sisi lain, pembacaan ke-46 menunjukkan deviasi yang lebih besar, di mana sensor membaca 37.61 cm terhadap validator 39 cm, dengan error sebesar 1.39 cm (3.56%). Dari seluruh data, error rata-rata adalah 2.97%, menunjukkan akurasi sensor sebesar 97.03%.
Pada pengujian sistem 3 ini dalam kondisi Bahaya / banjir pada alat. Pengujian ini untuk melihat bagaimana alat ini bekerja dalam pembacaan ketika kondisi Siaga sesuai set-point. Pengujian ini dilakukan dengan memantau ketinggian air dan kondisi pada LCD, waktu pada database, dan delay. Data didapatkan seperti hasil pada Gambar 8.
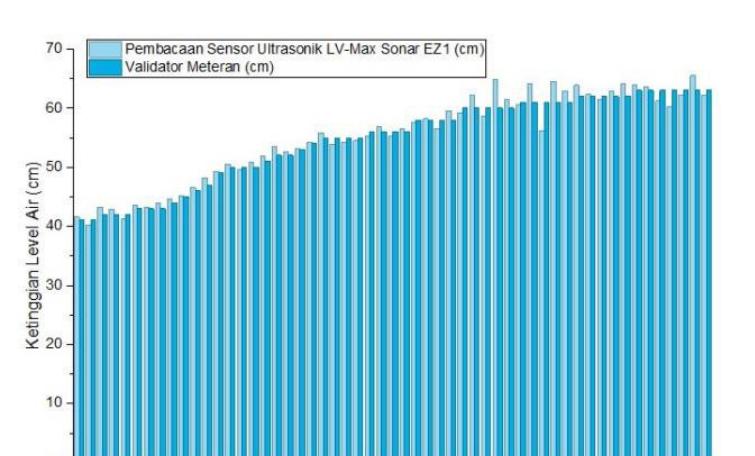
Gambar 8. Grafik pengujian sensor ultrasonik dalam kondisi Bahaya
Grafik pada Gambar 8 diatas adalah pada pengujian dalam kondisi Bahaya / banjir, pembacaan pertama sensor membaca nilai 41.59 cm sementara validator menunjukkan 41 cm menghasilkan error sebesar 0.59 cm dengan persentase error 1.44%. Pada pembacaan kedua, sensor membaca 40.27 cm terhadap validator 41 cm menghasilkan error 0.73 cm atau 1.78%. Pembacaan ketiga mencatat nilai sensor 43.25 cm dengan validator 42 cm menghasilkan error sebesar 1.25 cm (2.98%). Pada pembacaan keempat, nilai sensor adalah 42.92 cm terhadap validator 42 cm memberikan error sebesar 0.92 cm atau 2.19%.
Pada pembacaan kesepuluh, sensor menunjukkan nilai 45.22 cm dibandingkan validator 45 cm memberikan error terkecil sebesar 0.22 cm atau 0.49%. Sebaliknya, pada pembacaan kedua belas, nilai sensor mencapai 48.23 cm dengan validator 47 cm menghasilkan error sebesar 1.23 cm (2.62%). Pada pembacaan kelima belas sensor membaca 49.56 cm terhadap validator 50 cm menghasilkan error sebesar 0.44 cm atau 0.88%. Di sisi lain, pembacaan keenam belas menunjukkan nilai sensor 50.89 cm dengan validator 50 cm, menghasilkan error sebesar 0.89 cm (1.78%).
Pada pembacaan kedua puluh satu, sensor membaca 54.21 cm terhadap validator 54 cm menghasilkan error terkecil di kelompok ini sebesar 0.21 cm atau 0.39%. Namun, pembacaan ketigapuluh tujuh mencatat error tertinggi dalam kelompok ini dimana sensor membaca 64.87 cm dibandingkan validator 60 cm memberikan error sebesar 4.87 cm atau 8.12%. Di pembacaan terakhir (ke limapuluh lima), sensor membaca 62.21 cm terhadap validator 63 cm, menghasilkan error 0.79 cm atau 1.25%. Secara keseluruhan, nilai rata-rata error sebesar 2.078% menunjukkan akurasi sensor sebesar 97.922%.
4.3 Pengujian Integrasi Software
Pengujian integrasi software dilakukan untuk mengetahui apakah aplikasi dan data dari alat dapat terhubung dan melakukan pembacaan data dengan baik atau tidak. Pada tahap pengujian dan pengambilan data ini, tujuannya adalah untuk mengevaluasi respons dan kinerja alat yang dikembangkan sesuai dengan Tabel 2.
Tabel 2. Hasil pengujian software
| No | Parameter | Apakah terbaca di database? |
|---|---|---|
| 1 | Nilai Level Air | Ya |
| 2 | Kondisi | Ya |
Gambar 9. Data pengujian software
Dari hasil pengujian yang ditampilkan dalam tabel, terlihat bahwa waktu pembacaan dan tampilan data di LCD TFT display serta database dengan rata-rata waktu delay sekitar 8 detik sesuai Gambar 9.
5 Kesimpulan
Dari hasil penelitian, dapat disimpulkan bahwa sistem monitoring berbasis Internet of Things (IoT) yang dirancang berhasil memantau ketinggian air secara real-time dengan akurasi mencapai 96.435%. Penggunaan sensor ultrasonik LV-MaxSonar EZ1 memberikan hasil pengukuran yang presisi, dengan data yang ditampilkan pada LCD lokal dan dikirim ke server pusat dengan waktu tunda yang rendah, antara 0,05 hingga 0.07 detik. Sistem ini mampu mengidentifikasi tiga kondisi ketinggian air (Normal, Siaga, dan Bahaya) dengan tingkat kesalahan yang dapat diterima, yaitu kurang dari 3%. Dengan kinerja tersebut, sistem ini efektif dalam memberikan pembaruan data secara real-time, yang dapat membantu mendeteksi potensi banjir secara lebih cepat dan meningkatkan efisiensi pengelolaan sumber daya air. Untuk pengimplementasiannya, disarankan agar simulator yang digunakan dapat lebih merepresentasikan fenomena yang sesungguhnya. Hal ini penting agar kondisi yang disimulasikan lebih realistis, dengan memperhitungkan faktor-faktor seperti perubahan debit air, fluktuasi cuaca, atau kemungkinan kerusakan pada pompa yang terjadi di lapangan. Simulator yang lebih mendekati kondisi nyata akan meningkatkan efektivitas sistem dalam mengatasi tantangan di lapangan dan memberikan deteksi dini banjir yang lebih akurat. Dengan demikian, sistem ini dapat menjadi solusi yang lebih baik dalam mendukung Pemerintah Kota Surabaya dalam mitigasi risiko banjir dan pengelolaan air yang lebih efisien pada rumah pompa