
1. Pendahuluan
Di Indonesia khususnya, setelah produksi minyak dan gas bumi di daratan (onshore) dan di perairan dangkal (sekitar selat Madura, selat Sunda dan perairan Pantai Utara) diperkirakan makin menurun, maka usaha pencarian sumber baru mulai diarahkan ke perairan yang lebih dalam, seperti perairan di Kepulauan Natuna (melalui "Proyek Natuna"), perairan Indonesia bagian timur (perairan Makassar), dan lain-lain. Salah satu konsekuensi dari kecenderungan tersebut adalah naiknya kebutuhan akan jenis struktur anjungan lepas pantai yang sesuai untuk perairan dalam (lebih dari 1000 ft). Salah satu jenis struktur yang bisa menjadi alternatif adalah Tension Leg Platform (TLP).
Pemakaian jenis struktur terpancang (fixed jacket platform) di perairan dalam, pada prinsipnya sangat dibatasi oleh kendala kelakuan dinamis struktur dan pertimbangan efektivitas biaya pembangunannya. Struktur jacket untuk perairan dangkal (shallow water) memiliki nilai rasio β (rasio antara periode natural struktur dan periode natural gaya gelombang eksitasinya) yang kecil dan faktor pembesaran dinamisnya (Dynamic Amplification Factor) mendekati satu, sehingga hal ini secara prinsip menunjukkan kelakuan statis. Jika struktur jacket digunakan di perairan yang makin dalam maka struktur menjadi makin fleksibel (lentur) sehingga periode natural gerakannya makin mendekati periode gelombang eksitasinya. Di lain pihak jika kekakuan strukturnya ditambah dengan cara memperbesar bagian dasar struktur yang terpancang di dasar laut, maka biaya pembangunannya akan meningkat drastis sehingga menjadi kendala dari segi efektivitas biayanya (Litton, 1989).
Kenaikan biaya-relatif instalasi untuk TLP dengan makin dalamnya perairan relatif kecil. Sementara itu untuk jenis struktur terpancang (pile-supported platforms) dan struktur menara bertali tambat (guyed tower) maka biaya istalasinya akan naik secara drastis dengan bertambahnya kedalaman (McClelland dan Reifel, 1986).
Menurut Yoshida (1981), salah satu kelakuan TLP yang cukup penting adalah bagaimana respon dinamisnya terhadap beban sentak atau disebut juga "impact tension". Analisis yang mengabaikan aspek dinamis tether bisa dilakukan (dan hasilnya cukup baik) jika hanya untuk memprediksi amplitudo gerak platform akibat gelombang. Tetapi jika untuk memprediksi tegangan dinamis dari tether akan memberikan kesalahan yang serius.
Patel dan Lynch (1983) dalam studinya yang antara lain juga menggunakan pendekatan elemen hingga, mengatakan bahwa kemungkinan terjadinya interaksi
dinamis antara tether dan platform pasti ada. Di perairan dalam, dengan inersia tether sekitar 6% dari platform dan jika periode alami dari tether yang cukup panjang mencapai 5 – 10 detik, maka responnya akan mendekati periode eksitasi gelombang.
Sebelumnya, Jeffery dan Patel (1982) telah melakukan studi dengan metode elemen hingga untuk dinamika tether (taut cable). Salah satu hasilnya memperlihatkan bahwa dengan model elemen hingga yang lebih kompleks, maka perilaku nonideal dari tether seperti variasi gaya-tarik dan redaman nonlinier tether dapat terakomodasi.
Struktur TLP merupakan suatu sistem yang kompleks dimana sarat dengan komponen-komponen fungsional. Untuk menganalisis TLP dengan suatu model yang lengkap (model hidroelastis lengkap) yang mana diharapkan dapat memberikan semua informasi perancangan yang lengkap, merupakan suatu pekerjaan yang hampir tidak mungkin dilakukan. Untuk keperluan analisis respon dinamis TLP, suatu pendekatan yang lebih praktis yang dapat diterima dalam proses perancangan adalah dengan menganggap platform-TLP sebagai sebuah benda kaku (rigid body) terapung yang ditambat dengan suatu sistem tether dengan kekakuan dan massa tertentu.
Penelitian ini akan menganalisis pengaruh faktor kekakuan geometrik nonlinier tether terhadap respon dinamis struktur TLP sebagai suatu sistem kopel platformtether serta bagaimana pemodelannya melalui pendekatan Metode Elemen Hingga (Finite Element Method). Respon dinamis TLP pada penelitian ini dihitung melalui perangkat lunak MSC/Nastran for Windows.
Batasan-batasan yang diberlakukan dalam penelitian ini antara lain :
- 1. Karena melihat pada faktor yang lebih dominan, maka bagian hull dari TLP dianggap hanya mendapat beban gelombang.
- 2. Perhitungan beban pada bagian hull dilakukan pada posisi awal kesetimbangan statisnya. Selama pergerakannya, draft TLP masih dianggap konstan yaitu pada draft kondisi operasional.
- 3. Gerak TLP yang ditinjau hanya untuk gerak bidang (planar motion) yang meliputi gerak arah surge, heave dan pitch.
2. Struktur Tension Leg Platform (TLP)
2.1 Deskripsi singkat struktur TLP
Tension Leg Platform (TLP) termasuk struktur anjungan lepas pantai jenis "compliant structures" yang sangat cocok dipakai di perairan dalam. Karakteristik
utama TLP yang membedakan dengan jenis struktur terpancang (fixed jacket type) adalah respon TLP yang "ikut bergerak" bersama gelombang yaitu yang justru tidak bersifat menahan gelombang.
Struktur pendukung TLP terdiri dari platform, tendon (tether) dan template seperti ditunjukkan pada Gambar 1. Platform merupakan struktur pengapung yang di atasnya terdapat geladak (deck) tempat dimana fasilitas produksi dan tempat tinggal pekerja berada. Platform tersusun dari ponton dan kolom yang bisa memberikan daya apung yang cukup untuk menjaga agar geladak selalu berada di atas permukaan air bagaimanapun kondisi lautnya. Kolom ini diikat ke dasar laut dengan tendon dan dipancangkan dengan template. Daya apung platform inilah yang memberikan gaya-tarik awal (pretension) pada tendon.
Sistem penambatannya yang kaku menyebabkan gerakan platform pada saat terkena gelombang menjadi terbatas dalam arah heave, pitch dan roll. Kekakuan tendon yang tinggi juga menyebabkan periode natural dalam arah gerakan tersebut sangat kecil. Geometri dari hull dan penempatan tendon biasanya dibuat simetris agar periode roll dan pitchnya sama. Biasanya periode natural TLP dalam arah heave dan pitch untuk aplikasi perairan dalam (lebih dari 1000 ft) berkisar antara 1 sampai 5 detik. Sebaliknya, struktur TLP cukup lentur dalam arah surge karena gaya pengembali pada tendon dalam arah ini umumnya kecil. Periode natural TLP dalam arah surge (atau sway) adalah cukup besar yaitu dalam orde 100 detik atau lebih.
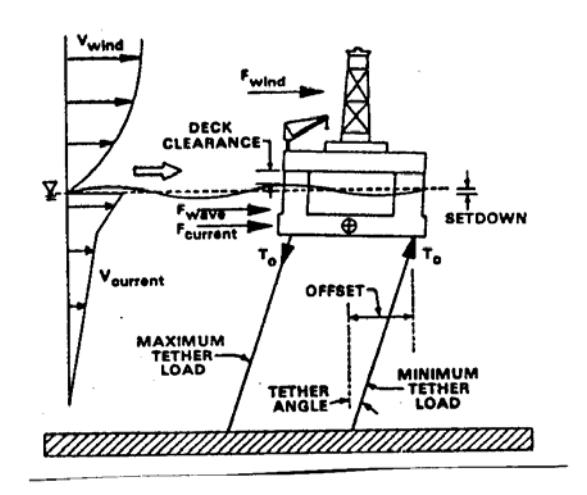
Secara umum, gaya lingkungan yang bekerja pada struktur lepas pantai, termasuk TLP, adalah berupa gaya gelombang, arus, angin dan gaya akibat pasang surut air laut. Ilustrasi gaya-gaya tersebut secara garis besar dapat dilihat pada Gambar 2 (Heideman, 1989).
Angin, gelombang dan arus menyebabkan TLP cenderung berosilasi terhadap suatu posisi offsetnya dari pada terhadap posisi vertikal awalnya. Offset dalam arah surge terkait dengan "set down" yaitu turunnya TLP dalam arah heave yang berakibat bertambahnya daya apung sehingga gaya-tarik pada tendon menjadi lebih besar dari pada dalam posisi vertikalnya. Sementara itu efek orde yang lebih tinggi akibat sifat non-linier alami dari gelombang dan strukturnya akan mempengaruhi respon dinamisnya (Bar-Avi, 1999). Dalam penelitian ini, gaya luar yang dipertimbangkan hanya gaya gelombang yang bekerja pada bagian platform TLP.
2.2 Beban gelombang pada platform TLP
Beban gelombang yang bekerja pada platform dihitung dengan persamaan Morison, dimana dalam hal ini hanya suku inersia saja yang diperhitungkan. Hal ini berdasarkan pada batasan d/λ dan juga untuk diameter silinder yang relatif besar dimana H/D ≤ 1, maka gaya seretnya akan kurang dari 10% dari gaya inersianya sehingga untuk kepraktisan gaya seret bisa diabaikan. Secara lebih lengkap dibahas pada Penelitian II (Prastianto, 2001). Sementara itu teori gelombang yang dipakai adalah teori gelombang Airy (Linier). Gaya dan momen gelombang total pada platform TLP dihitung dengan cara superposisi gaya atau momen pada kolom dengan gaya atau momen pada ponton dimana percepatan horisontal partikel fluida dihitung pada sumbu kolom dan ponton dari platform.
Persamaan Morison disusun oleh Morison, O'Brien, Johnson dan Shaaf (1950) untuk menggambarkan gaya gelombang horisontal yang bekerja pada sebuah silinder vertikal yang terpancang di dasar perairan hingga muncul ke permukaan air. Morison, dkk menyatakan bahwa gaya yang ditimbulkan oleh gelombang permu-
Gambar 1. Skema struktur TLP Gambar 2. Skema gaya-gaya yang bekerja pada TLP
kaan-utuh (unbroken surface wave) pada sebuah silinder vertikal tersebut tersusun dari dua komponen gaya vaitu komponen gaya inersia (inertia force) dan gaya seret (drag force). Teori ini dalam penggunaannya dibatasi kondisi bahwa diameter silinder adalah kecil dibandingkan dengan panjang gelombang datangnya vaitu berkisar 1/10 atau kurang sehingga distorsi atau difraksi gelombang akibat keberadaan silinder diabaikan.
Dengan demikian, persamaan Morison didapat dengan cara menggabungkan komponen gaya inersia dan komponen gaya seret di atas. Jadi gaya per satuan panjangnya adalah:
\[F = F_{inersia} + F_{seret}\] \[= \rho C_I A \dot{u} + \frac{1}{2} \rho C_D D u |u|\] (1)
dimana F adalah gaya Morison per satuan panjang, \(\rho\)massa jenis air laut, A luas penampang struktur, D diameter luar struktur, \(C_I\) koefisien inersia (ditentukan secara eksperimental), \(C_D\) koefisien seret (ditentukan secara eksperimental), u menyatakan kecepatan horizontal partikel gelombang dan adalah percepatan horizontal partikel gelombang.
Jika pengaruh gerakan struktur dan arus ikut dipertimbangkan, maka akan didapatkan persamaan Morison dalam bentuk yang sudah dimodifikasi sebagai
\[F = -\rho C_A A \ddot{x} + \rho C_I A \dot{u} + \frac{1}{2} \rho C_D D (u + c - \dot{x}) (u + c - \dot{x})\] (2)
dimana \(\dot{x}\) adalah kecepatan gerak struktur, \(\ddot{x}\) percepatan struktur, c kecepatan arus laut dan \(C_A\)koefisien massa-tambah (\(C_A = C_M - 1\)). Suku \(\rho C_A A\)pada persamaan .(2) merupakan massa-tambah (added mass) fluida, yaitu massa fluida disekitar dinding struktur yang ikut bergerak bersama struktur.
Persamaan gaya gelombang total pada platform untuk arah surge adalah sebagai berikut :
\[F_{x} = 2Hg\rho\cos(ka) \cdot \left\{ A_{K}C_{m,x}^{K} \left(1 - e^{-kh}\right) + A_{P}C_{m,x}^{P}(kb') \cdot e^{-kE} \right\}\]\[\cdot \left\{ sin(kX)\cos(\omega t) - \cos(kX)\sin(\omega t) \right\}\](3)
Gaya gelombang total pada platform untuk arah heave dapat dinyatakan dengan persamaan berikut :
\[F_{z} = 2\rho g H \left[ A_{K} e^{-kh} \cos(ka) - A_{P} C_{m,z}^{P} e^{-kE} \left\{ \sin(ka') + (kb')\cos(ka) \right\} \right] \cdot \left\{ \cos(kX)\cos(\omega t) + \sin(kX)\sin(\omega t) \right\}\] \[(4)\]
Dan momen pitching total pada platform berbentuk persamaan berikut:
\[M_{y} = 2\rho g H \cdot \{K_{K} + K_{P}\} \cdot \{sin(kX)cos(\omega t) - cos(kX)sin(\omega t)\}\] (5)
dimana:
\[\begin{split} K_K &= A_K \left\{ C_{m,x}^K \left( h - \frac{1}{k} + \frac{e^{-kh}}{k} \right) \cos(ka) + a \cdot e^{-kh} \cdot \sin(ka) \right\} \\ K_P &= A_P \cdot e^{-kE} \left[ C_{m,z}^P \left\{ a' \cdot \cos(ka') - \frac{\sin(ka')}{k} - a \cdot (kb') \sin(ka) \right\} \right. \\ &+ C_{m,x}^P \cdot \left( kb' \left( \frac{l}{2} \right) \cos(ka) \right] \end{split}\]
3. Aspek Dinamis TLP
3.1 Gava dan momen hidrostatis
Efek gaya dan momen pengembali hidrostatis (gaya apung) akan muncul bila platform ditenggelamkan dalam air. Perhitungan gaya dan momen hidrostatis pada platform dilakukan dengan cara membagi platform menjadi kolom dan pontonnya, sehingga nilai totalnya diperoleh dengan menjumlahkannya untuk semua elemen penyusun platform tersebut (McIver, 1978). Dalam bentuk matrik, kekakuan hidrostatik platform adalah:
\[\begin{bmatrix} K_h \end{bmatrix} = \begin{bmatrix} 0 & 0 & 0 \\ 0 & 4\rho g A_1 & 0 \\ 0 & 0 & \rho g \left( A_1 H^2 + V \overline{KB} \right) \end{bmatrix}\] (6)
3.2 Gaya inersia hidrodinamis
Pergerakan platform akan menyebabkan partikel air disekelilingnya dipercepat sehingga menimbulkan gaya inersia hidrodinamis. Besar gaya ini proporsional dengan percepatan yang ditimbulkannya dan koefisien proporsionalitasnya dikenal sebagai massa tambah (added mass). Gaya inersia dari massa tambah yang terjadi akibat percepatan struktur ini arahnya akan berlawanan dengan arah percepatannya.
Dalam perhitungan massa tambah ini percepatan yang diperhitungkan hanyalah komponen percepatan yang tegak lurus terhadap sumbu silinder dari tiap-tiap elemen platform. Sementara itu, koefisien massa tambah silinder yang dipercepat secara aksial, efek permukaan bebas dan interaksi antar member yang berdekatan diabaikan.
Dalam bentuk matrik, besar massa tambah platform TLP adalah:
\[[M_{A}] = \begin{bmatrix} 4\rho C_{as(K)} A_{1} h_{1} & 0 & 2\rho C_{as(K)} A_{1} h_{1}^{2} \\ +2\rho C_{as(P)} A_{2} e_{2} & 0 \\ 0 & 4\rho C_{aH(P)} A_{2} e_{2} & 0 \\ 2\rho C_{as(K)} A_{1} h_{1}^{2} & 0 & \left(\frac{4}{3}\rho A_{1} h_{1}^{3} + \frac{2}{3}\rho A_{2} e_{2}^{3}\right) \end{bmatrix}\]
Sementara itu massa strukturnya sendiri (platform), dengan acuan gerak titik keel (K), dalam bentuk matrik adalah:
\[\begin{bmatrix} M_S \end{bmatrix} = \begin{bmatrix} m & 0 & m\overline{KG} \\ 0 & m & 0 \\ m\overline{KG} & 0 & I_K \end{bmatrix}\] (8)
dimana : \(I_K = I_G + m\overline{KG}^2\) adalah momen inersia platform terhadap titik K.
3.3 Redaman platform TLP
Frekuensi alami tanpa-redaman dari suatu struktur dinyatakan dengan:
\[\omega_n^2 = \frac{k}{m} \tag{9}\]
Jika didefinisikan suatu besaran tak berdimensi yang disebut faktor redaman viskos (μ) yaitu :
\[\mu = \frac{c}{c_{cr}} \tag{10}\] dengan koefisien redaman kritis, \(c_{cr} = 2 m \omega_n\) maka redaman viskos dari struktur (c) menjadi :
\[c = 2 m \omega_n \mu \tag{11}\]
Faktor redaman viskos untuk platform pada penelitian ini sebesar 3% untuk ketiga arah gerak yang ditinjau (surge, heave dan pitch).
3.4 Solusi nonlinier masalah dinamis
Pendekatan dasar dari setiap solusi nonlinier adalah berupa solusi yang terdiri dari rangkaian solusi bertahap (incremental solutions). Dalam masalah nonlinier statis, maka besar beban akan dikenakan secara bertahap. Sedang untuk masalah nonlinier dinamis transien, maka pentahapan beban adalah berjalan terhadap waktu.
Solusi dalam tiap tahap diprediksi (dihitung) berdasarkan kondisi pada saat itu (current state) dari kekakuan dan pertambahan bebannya. Tergantung pada jenis nonlinieritasnya, maka pada setiap tahap akan terbentuk suatu ketidakseimbangan gaya (unbalance force) pada tiap iterasi pada saat perilaku nonlinieritas teriadi. Untuk itu diperlukan suatu solusi iteratif untuk menyeimbangkan gaya tersebut. Iterasi akan terus berlangsung sampai mencapai suatu kriteria konvergensi tertentu. Pada saat konvergensi telah tercapai, berarti solusi untuk tahap tersebut telah didapat. Selanjutnya proses solusi akan diteruskan untuk tahap berikutnya dengan menggunakan nilai awal dari solusi sebelumnya itu.
4. Model Elemen Hingga TLP
Dalam studi kasus penelitian ini digunakan model TLP dengan geometri dan dimensi seperti Gambar 3. TLP dimodelkan dalam bentuk dua dimensi dan analisis geraknya dilakukan sebagai gerak bidang (plane motion) yang meliputi gerak translasional arah surge dan heave serta gerak rotasional pitch. TLP dimodelkan menjadi dua bagian besar yaitu bagian platformnya sebagai suatu benda kaku (rigid body) dan bagian tethernya sebagai elemen balok (beam). Model analitis dan model elemen hingga TLP ditunjukkan Gambar 4 dan 5.
Model elemen hingga dari struktur TLP dalam program MSC/N4W secara garis besar tersusun dari elemen balok (beam), elemen massa dan elemen pegas (spring). Bentuk geometri dari model yang tersusun dari elemen-elemen tersebut di atas seperti dalam Gambar 5.
Sementara itu beban gelombang pada platform untuk ketiga arah gerak (surge, heave dan pitch) masingmasing dimodelkan sebagai gaya dan momen dalam fungsi waktu yang bekerja pada simpul (nodal load) dimana ada massa terkumpul dari platform.
Untuk tujuan studi ini dilakukan tiga macam analisis yaitu analisis Nonlinier Statis, Modus Getar dan analisis Nonlinier Dinamis (Nonlinear transient Response). Faktor nonlinieritas yang ada tergolong sebagai nonlinieritas geometrik yaitu yang timbul akibat adanya faktor gaya tarik awal (pretension), berat-sendiri dari tether dan faktor deformasi besar (large displasement). Sedangkan nonlinieritas material tidak dipertimbangkan.
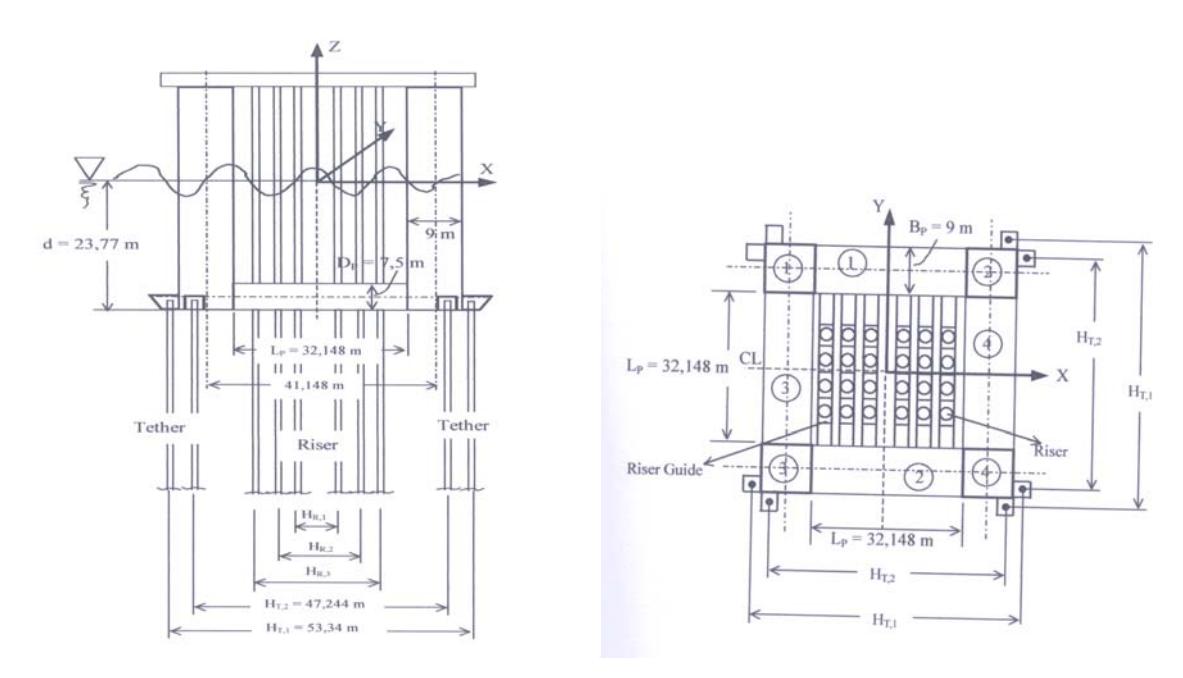
Gambar 3. Geometri dan dimensi model TLP
Gambar 4. Model analitis TLP Gambar 5. Model Elemen Hingga TLP
Matrik kekakuan elastis dan matrik massa konsisten untuk elemen tether sebagai elemen balok-kolom bidang (dua dimensi) adalah sebagai berikut:
\[[k_E] = \begin{bmatrix} C_1 & 0 & 0 & -C_1 & 0 & 0 \\ 0 & 12C_2 & 6C_2L & 0 & -12C_2 & 6C_2L \\ 0 & 6C_2L & 4C_2L^2 & 0 & -6C_2L & 2C_2L^2 \\ -C_1 & 0 & 0 & C_1 & 0 & 0 \\ 0 & -12C_2 & -6C_2L & 0 & 12C_2 & -6C_2L \\ 0 & 6C_2L & 2C_2L^2 & 0 & -6C_2L & 4C_2L^2 \end{bmatrix}\]
dimana, \(C_1 = \frac{AE}{L}\) dan \(C_2 = \frac{EI}{L^3}\) dengan A adalah luas penampang elemen, E modulus Young elemen, L menyatakan panjang elemen dan I adalah momen inersia penampang elemen tether.
\[[m] = \frac{\rho AL}{420} \begin{bmatrix} 140 & 0 & 0 & 70 & 0 & 0 \\ 0 & 156 & 22L & 0 & 54 & -13L \\ 0 & 22L & 4L^2 & 0 & 13L & -3L^2 \\ 70 & 0 & 0 & 140 & 0 & 0 \\ 0 & 54 & 13L & 0 & 156 & -22L \\ 0 & -13L & -3L^2 & 0 & -22L & 4L^2 \end{bmatrix}\]
dimana p adalah massa jenis bahan tether.
Dalam studi ini kekakuan total tether dipertimbangkan dari kontribusi komponen kekakuan elastis dan komponen kekakuan geometriknya. Komponen kekakuan geometrik tether tersebut berasal dari adanya gaya tarik awal (pretension), gaya berat-sendiri dari tether dan deformasi besar (large displacement) dari tether. Di dalam terori deformasi besar, persamaan kesetimbangan harus diformulasikan pada kondisi konfigurasi vang terdeformasi.
Kekakuan total elemen balok-kolom terdiri dari dua komponen yaitu kekakuan elastis, \(k_{\rm E}\) dan kekakuan geometrik, \(k_G\).
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
5. Hasil dan Pembahasan
5.1 Verifikasi model
(12)
(13)
Verifikasi model elemen hingga dilakukan untuk memastikan bahwa model yang dibuat sudah tepat dalam merepresentasikan kondisi struktur (TLP) yang sebenarnya. Verifikasi dilakukan dengan jalan membandingkan hasil MEH dengan hasil perhitungan analitis yang sudah dilakukan dalam Penelitian III (Prastianto, 2002). Faktor yang dibandingkan adalah kurva offset hull vs. beban statis horisontalnya dan besaran frekuensi alaminya untuk ketiga mode gerak (surge, heave dan pitch).
Perbandingan besar offset hull akibat gaya gelombang statis antara hasil model elemen hingga dan perhitungan analitis diberikan dalam Gambar 6.a. Hasil MEH menunjukkan besar offset yang lebih kecil. Hal ini memperlihatkan bahwa kekakuan tether bertambah. Bertambahnya kekakuan tether ini akibat timbulnya kekakuan geometrik yang berasal dari efek deformasi besar dan berat-sendiri dari tether vang ikut dipertimbangkan dalam analisis. Dengan demikian besar offset hull akan berkurang dengan cukup signifikan.
Kurva Offset vs. Setdown dari hull akibat gaya gelombang statis arah surge (tanpa gaya arus pada tether) dapat dilihat pada Gambar 6.b. Terlihat pula bahwa hubungan antara offset dan setdown tidak lagi linier karena adanya faktor nonlinier geometrik di atas.
Verifikasi kedua adalah dengan melihat besaran properti dinamis TLP vaitu frekuensi alaminya. Hal ini diperlukan selain untuk uji model juga untuk mengetahui rentang frekuensi alami dari struktur TLP yang mana pada tahap berikutnya, sangat penting untuk acuan dalam menentukan frekuensi gaya dinamis pada saat analisis respon dinamis struktur dilakukan. Tabel 1. menunjukkan nilai frekuensi alami TLP untuk ketiga arah gerak antara hasil MEH dan perhitungan analitis. Terlihat bahwa secara keseluruhan perbedaan antara hasil MEH dengan analitis cukup kecil.
Dengan demikian, melalui verifikasi yang kedua ini bisa dibuktikan bahwa model elemen hingga yang dibuat sudah tepat, terutama untuk membuktikan bahwa pretension sudah masuk menjadi kondisi awal dari TLP sebelum analisis respon dinamisnya dilakukan. Karena adanya pretension aksial dalam struktur akan menaikkan frekuensi alaminya, terutama sangat berpengaruh terhadap frekuensi rendahnya (Przemieniecki, 1968).
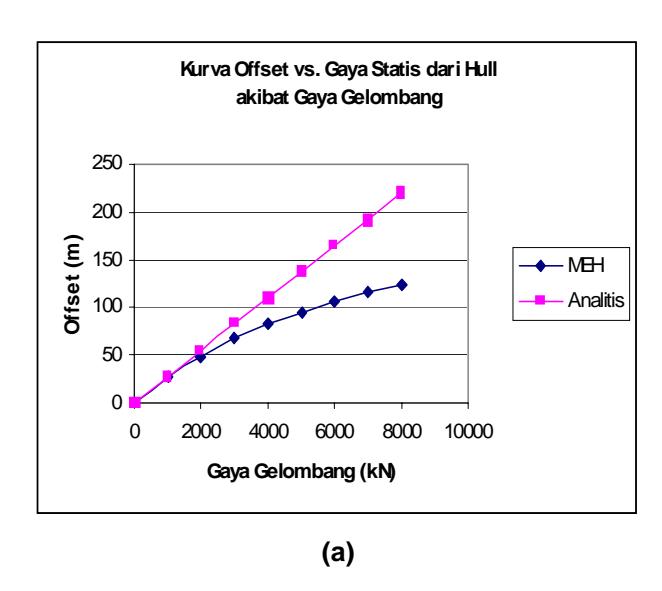
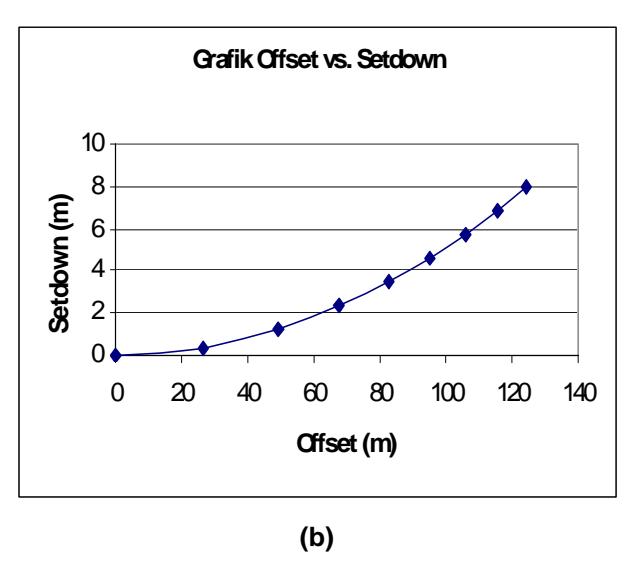
Gambar 6. (a). Kurva besar offset hull vs. gaya statis antara hasil Metode Elemen Hingga (MEH) dan analitis (b). Kurva besar offset vs. setdown dari hull hasil Metode Elemen Hingga (MEH)
Tabel 1. Perbandingan frekuensi alami TLP antara hasil MEH dengan hasil analitis
| Frekuensi Alami (Hz) | |||
|---|---|---|---|
| Arah Gerak | MEH | Analitis | Perbedaan (%) |
| Surge | 0.005327 | 0.005252 | 1.428 |
| Heave | 0.317382 | 0.3175 | 0.037 |
| Pitch | 0.301189 | 0.2944 | 2.306 |
5.2 Respon perpindahan TLP dalam domain waktu akibat beban gelombang pada hull
Dengan mempertimbangkan rentang frekuensi alami TLP, maka sebagai studi kasus digunakan gelombang reguler dengan frekuensi 0,1 Hz (periode 10 detik). Sehingga persamaan beban gelombang untuk ketiga arah yang ditinjau (surge, heave dan pitch) berturutturut adalah –2.384,948 Sin (ωt), –1.141,295 Cos (ωt) dan –40.757,565 Sin (ωt).
Faktor kekakuan geometris tether, selain akan menambah kekakuan TLP, maka setiap beban dalam arah masing-masing juga akan menimbulkan respon perpindahan kopel dalam arah yang lainnya. Dalam hasil respon perpindahan kopel dari hull dalam riwayat waktu ini didapati suatu fenomena penting yang bisa diamati yaitu bahwa respon perpindahan kopel dari hull tersebut (dalam arah tertentu) memungkinkan memiliki frekuensi yang mendekati frekuensi alami (natural frequency) dari TLP. Jika hal ini terjadi, maka akan terjadinya suatu fenomena yang disebut ringing yaitu suatu osilasi resonansi yang terjadi pada frekuensi alami TLP untuk mode gerak heave dan pitch. Dalam tahap analisis, maka kondisi ini perlu diketahui
karena jika terjadi bisa menimbulkan respon yang makin membesar yang bisa membahayakan keselamatan struktur.
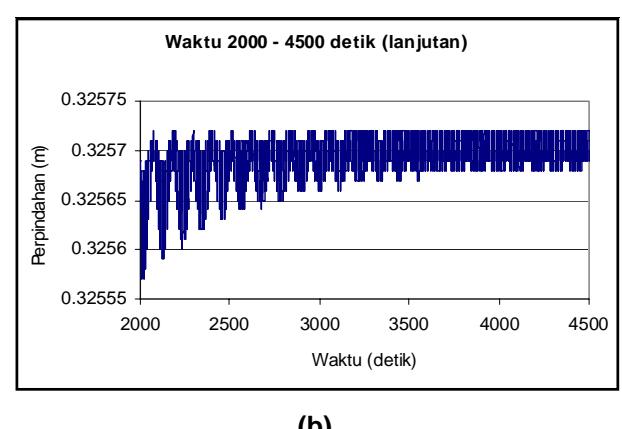
Gambar 7. (a). Grafik perpindahan hull arah heave akibat gaya gelombang surge (b). Grafik respon perpindahan hull arah heave dalam kondisi menuju stasioner
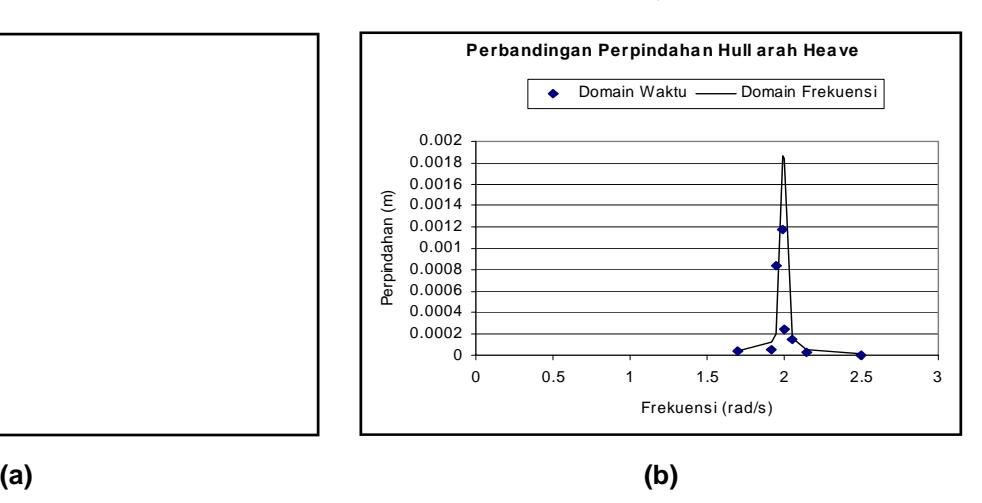
Gambar 8. (a). Grafik perpindahan Hull arah Pitch akibat gaya gelombang Heave (b). Grafik perbandingan respon perpindahan Hull arah Heave akibat gaya gelombang Heave antara domain waktu dan frekuensi
Secara keseluruhan, respon perpindahan hull terdiri dari dua komponen yaitu respon getaran bebas dan respon getaran paksa. Di antara semua hasil respon perpindahan tersebut, beberapa respon kopel yang paling menarik untuk diamati antara lain respon perpindahan arah heave akibat gaya gelombang surge dan respon perpindahan arah pitch akibat gaya gelombang heave.
Untuk respon perpindahan arah heave akibat gaya gelombang surge (Gambar 7), setelah respon perpindahan heave mulai menuju stasioner, maka hanya akan berosilasi tidak lebih dari posisi 0,32572 m yaitu pada posisi awal kesetimbangan statisnya akibat adanya pretension. Respon getaran bebas perpindahan arah heave dari hull akibat eksitasi gaya surge memiliki frekuensi dua kali lebih tinggi (yaitu 0,01 Hz) dari respon getaran bebas perpindahan arah surge-nya. Dalam 500 detik terjadi 5 gelombang sehingga periodenya 100 detik.
Sedangkan untuk respon perpindahan arah pitch akibat gaya gelombang heave (Gambar 8.a) menunjukkan bahwa secara keseluruhan respon sudut pitch yang terjadi sangat kecil. Namun demikian responnya menunjukkan kecenderungan naik sampai mencapai kondisi stasionernya yaitu setelah kurang lebih 3.500 detik. Periode responnya sebesar ± 3,5 detik yaitu pada frekuensi 0,286 Hz yaitu hampir mendekati frekuensi alami gerak pitch (0,3012 Hz). Pada respon ini ada indikasi kemungkinan terjadinya ringing. Namun demikian karena besar dari respon sudut pitch-nya sangat kecil dan tren respon berikutnya belum terlihat, maka dalam studi ini belum bisa disimpulkan tentang terjadinya ringing. Untuk memastikannya masih perlu dibuktikan lebih lanjut yaitu diantaranya dengan menghitung responnya dengan memvariasikan parameter frekuensi gaya eksitasinya atau variasi besar
Grafik hasil perbandingan menunjukkan hasil yang cukup baik. Hasil domain waktu menunjukkan harga yang sedikit lebih kecil. Hal ini disebabkan oleh adanya tambahan berupa faktor kekakuan nonlinier geometrik yang ikut dipertimbangkan dalam analisis domain waktunya yaitu akibat berat-sendiri dan perpindahan besar dari tether.
6. Kesimpulan
Melalui studi ini telah dihitung respon statik dan frekuensi alami TLP sebagai sarana validasi model elemen hingga TLP yang sudah dibuat. Selanjutnya telah dihitung pula respon dinamis nonlinier untuk gerak surge, heave dan pitch pada kondisi tanpa riser dari suatu model TLP full-scale di perairan berkedalaman ± 975 m dalam domain waktu. Analisis mencakup kekakuan geometrik nonlinier akibat pretension, beratsendiri dan deformasi besar (large displacement) dari tether.
Dari perhitungan dan analisis yang telah dilakukan, diperoleh beberapa kesimpulan sebagai berikut :
- Dengan memasukkan faktor nonlinier akibat pretension, berat-sendiri dan deformasi besar tether, didapat pengurangan respon perpindahan yang cukup signifikan, sehingga analisis lebih realistis.
- Validasi model melalui komparasi dengan hasil analitis menunjukkan hasil yang baik. Dalam kurva beban statis vs. defleksi, efek nonlinier geometrik terlihat cukup realistis. Dan perbedaan frekuensi alami TLP untuk gerak Surge, Heave dan Pitch antara hasil MEH dan analitis didapat berturutturut adalah 1.4%, 0.04% dan 2.3 %.
- Dengan mempertimbangkan faktor nonlinieritas geometrik akibat deformasi besar, dalam hasil analisis respon riwayat waktu akan dapat diamati kopel perpindahan Hull TLP untuk semua arah gerak yang ditinjau (surge, heave dan pitch).
- Respon kopel ini memungkinkan diperkirakan terjadi tidaknya fenomena ringing yaitu suatu osilasi resonansi pada frekuensi alami untuk gerak heave dan pitch.
Untuk melengkapi atau memperbaiki hasil studi ini dikemudian hari, penulis dapat memberikan saransaran berikut :
• Untuk mencapai hasil yang lebih baik, perhitungan beban gelombang secara numerik bisa dilakukan dengan Computational Fluid Dynamic (CFD) Soft
- ware. Dengan cara ini diharapkan massa-tambah yang didapat bisa lebih akurat, karena bagian platform TLP direpresentasikan secara utuh (tidak ponton dan kolomnya saja).
- Beban gelombang pada hull untuk waktu t tertentu, perlu dihitung sebagai fungsi dari perpindahan surge dan waktu t itu sendiri dan sarat (draft) TLP lebih baik dipertimbangkan sebagai fungsi dari dua variabel tersebut.
- Dalam menghitung beban hidrodinamis, perlu dipertimbangkan faktor kecepatan relatif antara kecepatan partikel air akibat gelombang dan arus dengan kecepatan gerak struktur.