
1. Latar Belakang
Metoda integrasi numeris sudah cukup banyak yang dikembangkan, mulai metoda trapezoidal sampai dengan Gaussian-quadrature. Dari semua metoda yang ada yang paling mudah pemakaiannya dan memberikan hasil yang cukup baik adalah metoda Gaussian-quadrature.
Pada paper ini dikembangkan alternatif metoda integrasi tanpa bermaksud meneliti kelebihan ataupun kekurangan metoda Gaussian-quadrature. Metoda integrasi yang dikembangkan adalah berdasarkan fakta bahwa suatu fungsi dapat dinyatakan dalam bentuk lain yang lebih sederhana yaitu dengan polinomial Lagrange. Mengingat bentuk polinomial Lagrange adalah tetap pada suatu jumlah titik polinomial, maka bila polinomial tersebut dikerjakan pada sistim koordinat kurvilinier dengan domain yang tetap \(-1 < \xi\)< 1, maka integrasi polinomial tersebut akan menghasilkan harga yang tetap, yang selanjutnya akan disebut dengan koefisien integrasi.
2. Polinomial Lagrange
Pada pasangan data \((f_i, x_i)\), i = 1, n, f dapat didekati dengan polinomial Lagrange. Adapun bentuk pendekatan tersebut adalah [Burden, Douglas, 1985]
\[f(x) = \sum_{i=1}^{n} L_i(x) f_i\] (2.1)
dimana : \(L_i(x)\) adalah polinomial Lagrange dengan
\[L_{i}(x) = \frac{(x - x_{1})(x - x_{2})(x - x_{3}).....(x - x_{n})}{(x_{i} - x_{1})(x_{i} - x_{2})(x_{i} - x_{3}).....(x_{i} - x_{n})}\]
\[L_{i}(x) = \prod_{\substack{i=1 \ \text{Dengan}}}^{n} \frac{\left(x - x_{j}\right)}{\left(x_{i} - x_{j}\right)}\] (2.2)
\[\prod_{\substack{i=1\\i\neq i\\i\neq i}}^{n} \frac{(x-x_{i})}{(x_{i}-x_{j})} = \frac{(x-x_{i})(x-x_{2})....(x-x_{j})....(x-x_{n})}{(x_{i}-x_{i})(x_{i}-x_{2})....(x_{i}-x_{j})....(x_{i}-x_{n})}\]
1. Staf Pengaiar Departemen Teknik Sipil FTSP-ITB.
2. Staf Pengajar Departemen Teknik Sipil FTSP-ITB.
2. Staf Pengajar Departemen Teknik Sipil FTSP-ITB.
2. Staf Pengajar Departemen Matematika FMIPA-ITB.
fungsi F(x), dimana integrasi secara analitik tidak dimungkinkan maka dapat dilakukan langkah berikut. Berdasarkan fungsi F(x) yang diketahui dapat dibuat pasangan data \(\{F_i, x_i\}\), i = 1, n, pada \(a \le x_i \le b\), dimana a dan b adalah batas-batas integrasi. Langkah berikutnya adalah mendekati F(x) dengan polinomial Lagrange menggunakan data set \(\{F_i, x_i\}\).
\[F(x) = f(x) = \sum_{i=1}^{n} L_i(x_i) F_i\] Sedangkan integrasi menjadi (2.3)
\[\int_{a}^{b} F(x) dx = \int_{a}^{b} f(x) dx = \int_{a}^{b} \sum_{i=1}^{n} L_{i}(x) F_{i} dx\] (2.4)\nintegrasi pada Persamaan (2.4) dapat dengan mudah diselesaikan mengingat \(L_i(x)\) berbentuk polinomial. Pada sistim koordinat \(\xi\), polinomial Lagrange berbentuk
\[F(\xi) = \sum_{i=1}^{n} L_{i} (\xi) F(\xi_{i})\] (2.5)
sedangkan integrasinya menjadi
\[\int_{-1}^{1} F(\xi) d\xi = \sum_{i=1}^{n} L_{i} (\xi) F(\xi_{l}), \text{ atau}\] \[\int_{-1}^{1} F(\xi) d\xi = \int_{-1}^{1} L_{l}(\xi) d\xi F(\xi_{l}) \int_{-1}^{1} L_{2}(\xi) d\xi F(\xi_{l}) + \int_{-1}^{1} L_{3}(\xi) d\xi F(\xi_{3})\] \[+ \int_{-1}^{1} L_{n}(\xi) d\xi F(\xi_{n})\]
3. Pembentukan Koefisien Integrasi
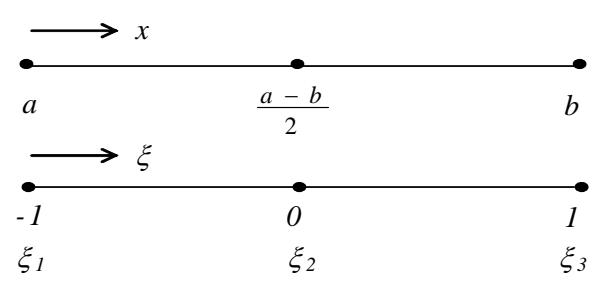
Meskipun integrasi polinomial dapat dengan mudah dilakukan, penggunaan Persamaan (2.4) untuk menghitung integrasi suatu fungsi masih kurang praktis, karena setiap kali harus membentuk polinomial Lagrange dan mengintegrasi-kannya. Bila segmen garis \(a \le x_i \le b\), ditransformasikan ke sistem koordinat kurvilinier \((\xi)\), dengan interval \(-1 \le \xi \le 1\), maka fungsi transformasi adalah
\[x(\xi) = \frac{b-a}{2} \xi + \frac{b+a}{2}\] \[dx = \frac{b-a}{2} d\xi\] (3.1)
Selanjutnya fungsi F(x), didekati dengan polinomial
Lagrange dalam system koordinat \(\xi\), yaitu
\[F(x) = \sum_{i=1}^{n} L_{i}(\xi) F_{i}\] (3.2)
Integrasi F(x) menjadi
\[\int_{a}^{b} F(x) dx = \frac{b - a}{2} \int_{-1}^{1} \sum_{i=1}^{n} L_{i}(\xi) F_{i} d\xi\] (3.3)
Integrasi \(\int_{1}^{1} L_{i}(\xi) d\xi\) dapat dengan mudah
diselesaikan dan mempunyai harga yang tetap, misal \(C_i\), maka Persamaan (3.3) menjadi
\[\int_{a}^{b} F(x) dx = \frac{b - a}{2} \sum_{i=1}^{n} C_{i} F_{i}\] (3.4)
dimana:
\[C_i = \int_{-1}^{1} L_i(\xi) d\xi\]
Untuk menambah ketelitian, dapat saja interval (a, b) dibagi-bagi lagi dalam sejumlah sub interval, hal ini mengingat bahwa
\[\int_{a}^{b} F(x) dx = \int_{a}^{a_{1}} F(x) dx + \int_{a_{1}}^{a_{2}} F(x) dx \dots + \int_{a_{m}}^{b} F(x) dx\]
dimana \(a < a_1 < a_2 < \dots < a_m < b\), atau penjelasan dengan sket
\[a\] \(a_1\) \(a_2\) \(a_3\) \(a_m\) \(b\)
Integrasi numeris dikerjakan pada masing-masing segmen, yaitu
\[\int_{a}^{b} F(x)dx = \frac{a_{1} - a}{2} \sum_{i=1}^{n} L_{i}(\xi)F_{i} + \frac{a_{2} - a_{1}}{2} \sum_{i=1}^{n} L_{i}(\xi)F_{i} + \dots + \frac{b - a_{m}}{2} \sum_{i=1}^{n} L_{i}(\xi)F_{i}\] \[\longrightarrow x\] \[\downarrow \qquad \qquad \downarrow \qquad \qquad \downarrow\] \[a \qquad \qquad b\] \[\longrightarrow \xi\] \[\downarrow \qquad \qquad \downarrow\] \[-1 \qquad \qquad \downarrow\]
Gambar 3.1. Transformasi sistem koordinat x ke sistem koordinat \(\xi\)
Jumlah titik polinomial pada suatu segmen ataupun sub-segmen dapat digunakan 2, 3, 4 ...... n titik polinomial, dimana semakin banyak titik polinomial, akan semakin kecil kesalahannya. Tetapi pada umumnya cukup digunakan polinomial Lagrange dengan 3 - 5 titik polinomial. Perhitungan koefisien integrasi dengan 3, 4 dan 5 titik polinomial akan dijelaskan pada bagian berikut.
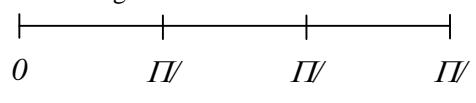
a. Integrasi dengan 3 titik polinomial
Pada skema ini interval garis a - b dibagi dalam 2 interval, yaitu seperti terlihat pada gambar berikut
Gambar 3.2. Integrasi dengan 3 titik polinomial
Dengan 3 titik polinomial atau titik integrasi tersebut, polinomial Lagrange akan berbentuk
\[L_{I}(\xi) = \frac{(\xi - \xi_{2})(\xi - \xi_{3})}{(\xi_{1} - \xi_{2})(\xi_{1} - \xi_{3})} = -\xi (\xi - 1)\](3.6)
Dengan memasukkan harga \(\xi_1 = -1\), \(\xi_2 = 0\), dan \(\xi_3 = 1\), Persamaan (3.6) menjadi
\[L_{2}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{3})}{(\xi_{2} - \xi_{1})(\xi_{2} - \xi_{3})} = (1 - \xi^{2})\](3.7)
\[L_{2}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{2})}{(\xi_{3} - \xi_{1})(\xi_{3} - \xi_{2})} = \xi (\xi + 1)\] (3.8)
Dengan demikian diperoleh koefisien integrasi yaitu
\[C_I = \int_{-I}^{I} L_I(\xi) d\xi = \int_{-I}^{I} -\frac{1}{2} \xi(\xi-1) d\xi = \frac{1}{3}\]
\[C_2 = \int_{-1}^{1} L_2(\xi) d\xi = \int_{-1}^{1} (1 - \xi^2) d\xi = \frac{4}{3}\]
\[C_3 = \int_{-1}^{1} L_3(\xi) d\xi = \int_{-1}^{1} \frac{1}{2} \xi(\xi+1) d\xi = \frac{1}{3}\]
Contoh (1) aplikasi integrasi dengan 3 titik polinomial pada fungsi sinusoidal \[\int_{0}^{\frac{\pi}{2}} \sin x \, dx\]
Penyelesaian: \[x = 0\] \(F_1 = 0\); \(x = \frac{\pi}{4}\) \(F_2 = \frac{1}{2}\sqrt{2}\)
; \(x = \frac{\pi}{2}\) \(F_3 = 1\)
\[\int_{0}^{\frac{\pi}{2}} \sin x \, dx = \frac{\frac{\pi}{2} - 0}{2} (C_1 F_1 + C_2 F_2 + C_3 F_3) = \frac{\pi}{4}\]
\[\left(\frac{1}{3}0 + \frac{3}{4} \frac{1}{2}\sqrt{2} + \frac{1}{3}1\right) = 1.002280 \text{ Hasil eksak dari sin } x\]
\[\int_{0}^{\frac{\pi}{2}} dx = 1, \text{ terlihat hasil numeris}\]
sangat dekat dengan hasil eksak, dengan kesalahan |1 - 1.00280|100% = 0.28%. Bila (b-a) terlalu besar, maka dapat dibagi lagi dalam sejumlah sub segmen, dan selanjutnya integrasi dilakukan dalam masingmasing sub-segmen yaitu, misal untuk pembagian dalam 2 sub-segmen, integrasi menjadi
\[\int_{a}^{b} F(x) dx = \int_{a}^{\frac{b-a}{2}} F(x) dx + \int_{\frac{b-a}{2}}^{b} F(x) dx =\] \[\frac{b-a}{4} \sum_{i=1}^{3} C_{i} F_{i} + \frac{b-a}{4} \sum_{i=1}^{3} C_{i} F_{i}\]
b. Integrasi dengan 4 titik polinomial
Pada skema ini interval garis a - b dibagi dalam 3 interval, yaitu
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Gambar 3.3. Integrasi dengan 4 titik polinomial
Dengan 4 titik polinomial ini, maka polinomial Lagrange berbentuk
\[L_{1}(\xi) = \frac{(\xi - \xi_{2})(\xi - \xi_{3})(\xi - \xi_{4})}{(\xi_{1} - \xi_{2})(\xi_{1} - \xi_{3})(\xi_{1} - \xi_{4})}\](3.9a)
\[L_{2}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{3})(\xi - \xi_{4})}{(\xi_{2} - \xi_{1})(\xi_{2} - \xi_{3})(\xi_{2} - \xi_{4})}\](3.9b)
\[L_{3}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{2})(\xi - \xi_{4})}{(\xi_{3} - \xi_{1})(\xi_{3} - \xi_{2})(\xi_{3} - \xi_{4})}\](3.9c)
L4 \[(\xi) = \frac{(\xi - \xi_1)(\xi - \xi_2)(\xi - \xi_3)}{(\xi_4 - \xi_1)(\xi_4 - \xi_2)(\xi_4 - \xi_3)}\] (3.9d)
Dengan memasukkan harga-harga \(\xi_l\) s/d \(\xi_4\) seperti pada Gambar (3.3) dan dengan mengintegrasikan dari -l dan ke l, maka diperoleh
\[C_{1} = \int_{-I}^{I} L_{I}(\xi) d\xi = 0.25; C_{2} = \int_{-I}^{I} L_{2}(\xi) d\xi = 0.75\] \[C_{3} = \int_{-I}^{I} L_{3}(\xi) d\xi = 0.75; C_{4} = \int_{-I}^{I} L_{2}(\xi) d\xi = 0.25\]
Contoh (2) integrasi fungsi sinusoidal sin x dx, dengan 4 titik integrasi
\[x = 0 F_1 = \sin 0 = 0.000000 ; x = \frac{\pi}{6} F_2 = \sin \frac{\pi}{6}\]
= 0.500000
\[x = F_3 = \sin = \frac{\pi}{3} = 0.866025\]; \(x = \frac{\pi}{2} = \sin = \frac{\pi}{2}\)
\[= 1.000000\]
\[\int_{1}^{1} F(x) dx = \frac{\pi}{4} (C_1 F_1 + C_2 F_2 + C_3 F_3 + C_4 F_4)\]
\[=\frac{\pi}{4} (0.25\ 0.000000+0.75\ 0.500000+0.75\ 0.866025+0.25\ 1.000000)\]
= 1.001005 Kesalahan terhadap hasil eksak adalah |1 - 1.001005|100% = 0.1005%.
4. Integrasi Bidang
Berdasarkan [Burden, Douglas, 1985], suatu fungsi bidang F(x, y) dapat didekati dengan perkalian polinomial Lagrange, yaitu
Pada titik \[\sum_{i=1}^{n} \sum_{j=1}^{n} (x_2, y_3)\] pada Gambar (4.1), \(F(x, y) = \sum_{i=1}^{n} \sum_{j=1}^{n} L_i(x) L_j(y) F(x_i, y_j)\) (4.1) m a k a poinomial Lagrange-nya adalah \(L_{2.3}(x, y) = L_2(x) L_3(y)\)
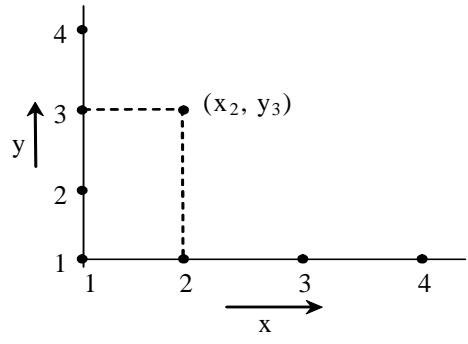
Gambar 4.1. Polinomial Lagrange pada bidang
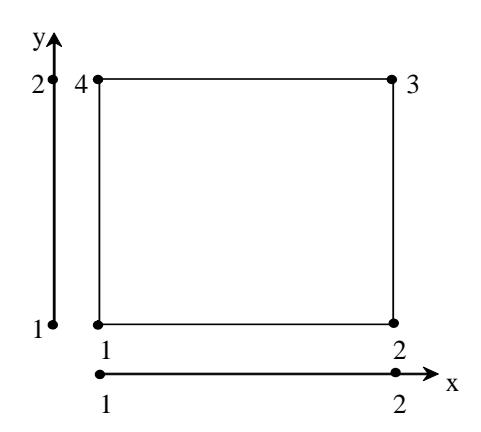
Gambar 4.2. Polinomial Lagrange pada bidang segi-empat
Dengan demikian untuk bidang segi empat seperti fungsi pada Gambar (4.2), maka
\[\begin{split} L_1\left(x,\,y\right) &= L_1\left(x\right)\,L_1\left(y\right)\,;\,L_2\left(x,\,y\right) = L_2\left(x\right)\,L_1\left(y\right)\\ L_3\left(x,\,y\right) &= L_2\left(x\right)\,L_2\left(y\right)\,;\,L_4\left(x,\,y\right) = L_1\left(x\right)\,L_2\left(y\right) \end{split}\]
Sebagaimana halnya dengan domain satu dimensi, maka pada domain dua dimensi ini juga akan lebih mudah bila digunakan sistem koordinat kurvilinier \((\varepsilon, \eta)\).
Bila digunakan polinomial Lagrange dengan 3 titik polinomial, baik pada arah \(\xi\) maupun \(\eta\), akan didapat polinomial Lagrange dengan titik-titik polinomial
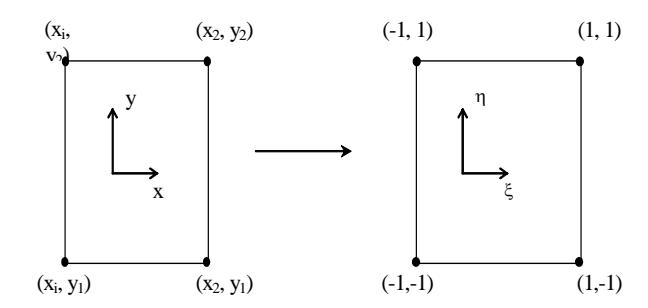
Gambar 4.3 Transformasi dari bidang (x,y) ke bidang ξ,η)
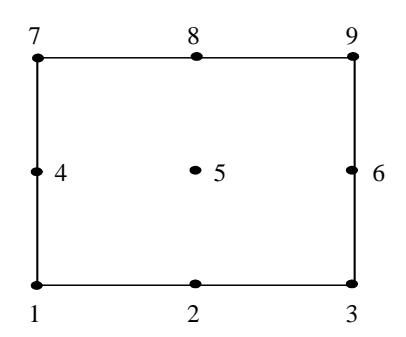
Gambar 4.4 Titik-titik polinomial untuk polinomial Lagrange 3 titik
sebagai berikut (Gambar 4.4)
Pada arah horizontal, arah \(\xi\), terdapat 3 polinomial L \((\xi) \text{ dan para arah } \eta \text{ juga terdapat 3} \text{ buah } L\) \(L_{1}(\xi) = \frac{1}{2} \xi (\xi - 1) \frac{(\eta)}{y \text{ a i t u}}, L_{1}(\eta) = \frac{1}{2} \eta (\eta - 1)\) \(L_{2}(\xi) = (1 - \xi^{2})\) \(L_{2}(\eta) = (1 - \eta^{2})\) \(L_{3}(\xi) = (1 - \xi^{2})\) \(L_{4}(\xi, \eta) F_{1} d\xi d\eta\) \(= \frac{x_{2} - x_{1}}{2} \frac{y_{2} - y_{1}}{2} \sum_{i=1}^{9} C_{i} F_{i}\)\(L_{3}(\xi) = \frac{1}{2} \quad \xi(\xi+1)\) \(L_{3}(\eta) = \frac{1}{2} \quad \eta(\eta+1)\)dimana dx = \(\frac{x_{2} - x_{1}}{2}\) d\xi dan dy = \(\frac{y_{2} - y_{1}}{2}\) d\xi. (3.8), dan (3.9) maka
\[\int_{x_{I}}^{x_{I}} \int_{y_{I}}^{y_{I}} F9x \, dx \, dy = \frac{x_{2} - x_{I}}{2} \frac{y_{2} - y_{I}}{2} \int_{-I}^{I} \int_{-I}^{I} \sum_{i=I}^{9} L_{i} (\xi, \eta) F_{i} \, d\xi \, d\eta\] \[= \frac{x_{2} - x_{I}}{2} \frac{y_{2} - y_{I}}{2} \sum_{i=I}^{9} C_{i} F_{i}\] \[\dim dx = \frac{x_{2} - x_{I}}{2} \, d\xi \, dan \, dy = \frac{y_{2} - y_{I}}{2} \, d\eta.\] (4.2)
Dengan demikian polinomial Lagrange pada titik-titik polinomial seperti terlihat pada Gambar 4.4 adalah
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Dengan menggunakan koefisien-koefisien integrasi tersebut maka integrasi pada domain bidang dapat dengan mudah diselesaikan, yaitu sebagai berikut
Dengan cara yang sama, dapat \(\frac{\pi}{2}\)diturunkan koefisien integrasi untuk \(\int_{0}^{\frac{\pi}{2}} \int_{0}^{\frac{\pi}{2}}\) sehingga pada bidang integrasi akan terdapat 16 <sup>n n</sup> t i t i k
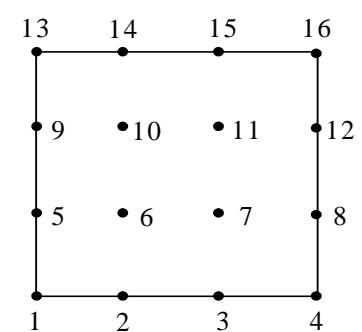
Gambar 4.5. Bidang integrasi dengan 16 titik polinomial
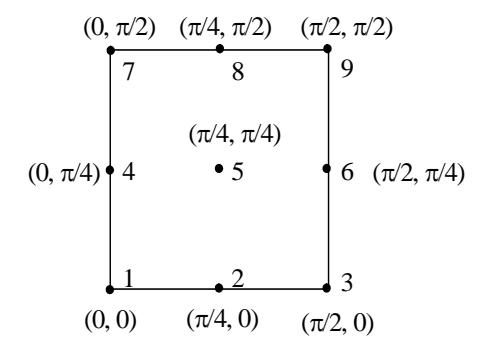
Gambar 4.6. Koordinat 9 titik polinomial
polinomial seperti terlihat pada Gambar (4.5).
\[\int_{0}^{\frac{\pi}{2}} \int_{0}^{\frac{\pi}{2}} \sin x \sin y \, dy \, dx = \frac{\frac{\pi}{2} - 0}{2} \frac{\frac{\pi}{2} - 0}{2} \int_{-1}^{1} \int_{-1}^{1} L_{i}(\xi, \eta) \, d\eta \, d\xi = \frac{\pi^{2}}{16} \sum_{i=1}^{9} C_{i} F_{i}\]
Selanjutnya dengan mengintegrasikan masing-masing suku pada polinomial Lagrange akan diperoleh harga koefisien integrasi sebagai berikut
\[\begin{split} C_1 &= 0.0625 \; ; \, C_2 = 0.1875 \; ; \, C_3 = 0.1875 \; ; \, C_4 = 0.0625 \\ C_5 &= 0.1875 \; ; \, C_6 = 0.5625 \; ; \, C_7 = 0.5625 \; ; \, C_8 = 0.1875 \\ C_9 &= 0.1875 \; ; \, C_{10} = 0.5625 \; ; \, C_{11} = 0.5625 \; ; \, C_{12} = 0.1875 \\ \int \int \limits_{0}^{\frac{\pi}{2}} \int \limits_{0}^{\frac{\pi}{2}} \sin x \sin y \, dy \, dx = \frac{\pi^2}{16} \sum \limits_{i=1}^{16} C_i \, F_i \quad C_{13} = 0.0625 \; ; \, C_{14} \\ &= 0.1875 \; ; \, C_{15} = 0.1875 \; ; \qquad C_{16} = 0.0625 \end{split}\]
Contoh (4): integrasi fungsi sinusoidal sin x sin y dx
Tabel 4.1. Perhitungan contoh (4) dengan 9 titik polinomial
| Titik | X | y | sin xi | sin yi | \(F_i\) | \(C_i\) | \(C_i\) \(F_i\) |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0.000000 | 0.000000 | 0.000000 | 0.111111 | 0.000000 |
| 2 | \(\pi/4\) | 0 | 0.000000 | 0.707107 | 0.000000 | 0.444444 | 0.000000 |
| 3 | \(\pi/2\) | 0 | 0.000000 | 1.000000 | 0.000000 | 0.111111 | 0.000000 |
| 4 | 0 | \(\pi/4\) | 0.707107 | 0.000000 | 0.000000 | 0.444444 | 0.000000 |
| 5 | \(\pi/4\) | \(\pi/4\) | 0.707107 | 0.707107 | 0.500000 | 1.777778 | 0.888889 |
| _ | \(\pi/4\) | 0.505405 | 1.000000 | 0.707107 | 0.444444 | 0.314270 | |
| 7 | \(\pi/2\) | 0.000000 | 0.000000 | 0.111111 | 0.000000 | ||
| 8 | \(\pi/4\) | 1.000000 | 0.707107 | 0.707107 | 0.444444 | 0.314270 | |
| 9 | \(\pi/2\) | 1.000000 | 1.000000 | 1.000000 | 0.111111 | 0.111111 | |
| 1.004565 |
Catatan : \(F_i = \sin x_i \sin y_i\)
dy, dengan 9 dan 16 titik integrasi
a. Perhitungan dengan 9 titik polinomial
\[\frac{\partial u}{\partial t} = F(u)\] dimana \(F_i = \sin x_i \sin y_i\). Dengan hasil eksak 1.0, maka kesalahan (5.1)
metoda numeris adalah |1.004565-1| 100%=0.4565%. Selanjutnya hasil perhitungan dapat dilihat pada Tabel 4.1.
\[\frac{\partial u}{\partial t}\Big|_{t} = F(u^{t})\] b. Perhitungan dengan 16 titik integrasi
\[\left. \frac{\partial u}{\partial t} \right|_{t+\delta t} = \mathrm{F}\left(\mathbf{u}^{t+\delta t}\right)\] Adapun hasil perhitungan disajikan pada Tabel 4.2 di bawah
Dengan hasil eksak 1.0, maka kesalahan metoda numeris adalah |1.002011 - 1| 100% = 0.2011%.
5. Penggunaan pada Penyelesaian Persamaan Differensial Waktu Orde 1 Nonlinier
Persamaan differensial waktu nonlinier orde 1, dapat ditulis dengan bentuk umum sebagai berikut.
Tabel 4.2. Perhitungan contoh (4) dengan 16 titik polinomial
| Titik | X | y | sin xi | sin yi | \(\mathbf{F_{i}}\) | \(C_{i}\) | \(C_i F_i\) |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0.000000 | 0.000000 | 0.000000 | 0.062500 | 0.000000 |
| 2 | \(\pi/6\) | 0 | 0.500000 | 0.000000 | 0.000000 | 0.187500 | 0.000000 |
| 3 | \(\pi/3\) | 0 | 0.866025 | 0.000000 | 0.000000 | 0.187500 | 0.000000 |
| 4 | \(\pi/2\) | 0 | 1.000000 | 0.000000 | 0.000000 | 0.062500 | 0.000000 |
| 5 | 0 | π/6 | 0.000000 | 0.500000 | 0.000000 | 0.187500 | 0.000000 |
| 6 | \(\pi/6\) | \(\pi/6\) | 0.500000 | 0.500000 | 0.250000 | 0.562500 | 0.140625 |
| 7 | \(\pi/3\) | \(\pi/6\) | 0.866025 | 0.500000 | 0.433013 | 0.562500 | 0.243570 |
| 8 | \(\pi/2\) | \(\pi/6\) | 1.000000 | 0.500000 | 0.500000 | 0.187500 | 0.093750 |
| 9 | 0 | \(\pi/3\) | 0.000000 | 0.866025 | 0.000000 | 0.187500 | 0.000000 |
| 10 | π/6 | \(\pi/3\) | 0.500000 | 0.866025 | 0.433013 | 0.562500 | 0.243570 |
| 11 | π/3 | \(\pi/3\) | 0.866025 | 0.866025 | 0.750000 | 0.562500 | 0.421875 |
| 12 | \(\pi/2\) | \(\pi/3\) | 1.000000 | 0.866025 | 0.866025 | 0.187500 | 0.162380 |
| 13 | 0 | π/2 | 0.000000 | 1.000000 | 0.000000 | 0.062500 | 0.000000 |
| 14 | Ü | 0.500000 | 1.000000 | 0.500000 | 0.187500 | 0.093750 | |
| 15 | π/6 | π/2 | 0.866025 | 1.000000 | 0.866025 | 0.187500 | 0.162380 |
| 16 | π/3 | \(\pi/2\) | 1.000000 | 1.000000 | 1.000000 | 0.062500 | 0.062500 |
| \(\pi/2\) | \(\pi/2\) | ||||||
| 1.002011 |
Catatan : \(F_i = \sin x_i \sin y_i\)
\[\frac{\partial u}{\partial t} = F(u^t)\] Penyelesaian secara (5.2a)
explicit adalah dengan mengerjakan Persamaan (5.1) pada saat t = t. Jadi \(u^{t+\delta t}\) hanya ditentukan oleh kondisi \(F(u^t)\) saja. \(u^{t+\delta t}\)
\[\frac{u^{t+\delta t} - u^{t-\delta t}}{2 \delta t} \quad F(u^t) \quad \text{Penyelesaian secara implisit adalah dengan mengerjakan}\] \[\mathbf{Persamaan} \ (\mathbf{5.1}) \ \text{pada saat} \ t = t + \delta t.\]
\[u_{pred}^{t+\delta t}\]
\[\frac{\partial u}{\partial t} = F(u^{t+\delta t}) \quad \text{Dalam hal ini harga } u^{t+\delta t} \qquad (5.2b)\] ditentukan oleh \(F(u^{t+\delta t})\).
Jadi baik metoda explisit maupun metoda implisit terdapat suatu kekurangan, dimana seharusnya harga \(\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\)
a. Prediktor
\(\partial u/\partial \tau\) dapat dinyatakan dengan skema forward maupun central difference. Dengan diperoleh harga . Bila diselesaikan dengan central difference, maka Persamaan (5.2a) menjadi
b. Korektor
Dengan harga \(u^{t+\delta t} =\) (hasil langkah prediktor), dikerjakan skema implisit yaitu
\[\int_{t_0}^{t+\delta t} du = \int_{t_0}^{t+\delta t} F(u) dt\] \[u^{t+\delta t} = + \int_{t_0}^{t+\delta t} F(u) dt \quad \text{backward difference,} \atop t_0 \text{ maka Persamaan} \quad (5.4)\]
(5.2b) menjadi \[\int_{F}^{ha} F(u)\]
Dengan menggunakan skema backward difference pada \(\partial u/\partial \tau\), maka akan diperoleh harga Selanjutnya harga \(u^{t+\delta t}\) adalah
\[u^{t+\delta t} = u^{t_0} + \int_{t_0}^{t} F(u) dt^{t+\delta t} = 0.5\] (5.5)
(5.2c)
Dengan harga \(u^{t+\delta t}\) yang baru tersebut, diulang langkah korektor, yait u dengan \(t-2\delta t\) \(t-\delta t\) t
Gambar 5.1. Integrasi dengan 3 titik polinomial
mengerjakan Persamaan (5.2b) dan (5.2c) lagi. Langkah ini diulang-ulang sampai diperoleh harga \(\mathbf{u}^{t+\delta t}\) yang konvergen, dimana
\[u_{pred}^{t+\delta} = u^{t-2\delta} + \delta t \left( \frac{1}{3} F^{t-2\delta} + \frac{4}{3} F^{t-\delta} + \frac{1}{3} F^t \right)\] (5.6)
harga \[\delta t\] diperoleh dari \(\frac{b-a}{2} = \frac{t-(t-2\delta t)}{2} = \delta t\)
\(\begin{array}{ll} \text{dimana} & \epsilon & \text{adalah} \\ \text{bilangan yang sangat kecil.} \end{array}\)
\[u^{t+\delta t} = u_{pred}^{t+\delta t}\]
Metoda prediktor korektor ini, dapat juga dikerjakan dengan cara integrasi yaitu sebagai berikut. Persamaan (5.1) dapat juga ditulis dalam bentuk lain yaitu:
Gambar 5.2. Integrasi dengan 4 titik polinomial (5.3)
Persamaan (5.3) ini dapat diselesaikan dengan metoda integrasi yaitu
\[u^{t+\delta t} = \frac{3}{2} u^{t-2\delta t} + \delta t (0.25 F^{t-2\delta t} + 0.75 F^{t-\delta t} + 0.75 F^{t} + 0.25 F^{t+\delta t})\] (5.7)
harga \[\delta t \frac{3}{2}\] diperoleh dari = \(\delta t \frac{b-a}{2} = \frac{t+\delta t - (t-2\delta t)}{2}\)\[= \frac{3}{2} \delta t\]
Pada Persamaan (5.4) tersebut tidak dapat diselesaikan karena \(\left|u_{old}^{t+\delta t}+u_{new}^{t+\delta t}\right| \leq \varepsilon.\)harga u<sup>t+δt</sup> tidak diketahui. Untuk mengatasi hal tersebut, maka metoda prediktor-korektor, sebagai dikerjakan berikut:
a. Prediktor
Sebagai langkah prediktor adalah \[\frac{\partial \eta}{\partial t} + \frac{\partial (uH)}{\partial x} = 0\] (5.8a)
Integrasi (5.5) \(\frac{\partial u}{\partial t} + u \quad \frac{\partial u}{\partial x} + g \quad \frac{\partial \eta}{\partial x} = 0 \quad \text{diseles aik an in tegras i}\)dengan polinomial Lagrange 3 titik, yaitu berdasarkan Gambar 5.1, dimana \(t_0 = t -\)
Dengan diketahuinya \(u^{t-2\delta t}\), \(u^{t-\delta t}\) dan \(u^t\) dari perhitungan Dengan diketahuinya \(u^{t-2a}\), \(u^{t-3a}\) dan \(u^t\) dari perhitungan sebelumnya, maka dapat dihitung \(F^{t-2\delta t} = F(u^{t-2\delta t})\), \(F^{t-\delta t}\) \(\frac{d \eta}{\partial t} = -\frac{\partial (uH)}{\partial x}\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H)\) \(\frac{d \eta}{\partial t} = F(u, H\)
b. Korektor
Dengan diketahuinya harga
\[\frac{\partial u}{\partial t} = G(u, \eta) \quad \text{maka dapat dihitung } F^{t+\delta i} = (5.9b)\] \[\text{dimana } G(u, \eta) = -u \quad \frac{\partial u}{\partial x} - g \quad \frac{\partial \eta}{\partial x} \quad \text{Persamaan}\] \[\text{diselesaikan secara}\]
Gambar 5.3. Variabel pada persamaan gelombang Airy dengan skema 4 titik.
\[\int_{t-2\delta t}^{t+\delta t} \partial n = \int_{t-2\delta t}^{t} F(u, H) dt + \delta t F^{t} \quad \text{Denggunakan}\]
\[\eta^{t+\delta t} = \eta^{t-2\delta t} + \delta t \left( \frac{1}{3} F^{t-2\delta t} + \frac{4}{3} F^{t-\delta t} + \frac{1}{3} F^{t} \right) + \delta t F^{t}\]
koefisien
\[\mathbf{F}^{t-2\delta t} = -\frac{\partial \left(uH\right)^{t-2\delta t}}{\partial x}; \mathbf{F}^{t-\delta t} = -\frac{\partial \left(uH\right)^{t-\delta t}}{\partial x}; \mathbf{F}^{t} = -\frac{\partial \left(uH\right)^{t}}{\partial x}\]
integrasi dari bab terdahulu, maka penyelesaiaan numeris dari Persamaan (5.6) adalah \(\partial_{(uH)}\)sebagai berikut
\[\int_{t-2\delta t}^{t+\delta t} \partial u = \int_{t-2\delta t}^{t} G(u, \eta) dt + \delta t G^{t}\]
y a n g \[G^{t-2\delta t} = \left(-u\frac{\partial u}{\partial x} - g\frac{\partial \eta}{\partial x}\right)^{t-2\delta t}; G^{t-\delta t} = \left(-u\frac{\partial u}{\partial x} - g\frac{\partial \eta}{\partial x}\right)^{t-\delta t}; G^{t} = \left(-u\frac{\partial u}{\partial x} - g\frac{\partial \eta}{\partial x}\right)^{t-\delta t}; G^{t} = \left(-u\frac{\partial u}{\partial x} - g\frac{\partial \eta}{\partial x}\right)^{t} \text{ diulang perhitungan korektor}\] Persamaan 5.7, sampai dicapai
konvergensi dimana:
Sebagai contoh pemakaian akan diselesaikan persamaan gelombang Airy satu dimensi, yaitu [Dean, Dalrymple]:
\[\eta^{t+\delta t} = \eta^{t-2\delta t} + \frac{3}{2} \delta t \left( 0.25 F^{t-2\delta t} + 0.75 F^{t-\delta t} + 0.75 F^{t} + 0.25 F^{t+\delta t} \right)\]
\[F^{t+\delta t} = -\frac{\partial (uH)^{t+\delta t}}{\partial t}\] a. Persamaan kontinuitas
b. Persamaan momentum
\[\mathbf{u}^{t+\delta t} = \mathbf{u}^{t-2\delta t} + \frac{3}{2} \delta t \left( 0.25 G^{-2\delta} + 0.75 G^{-\delta} + 0.75 G + 0.25 G^{+\delta} \right)\] \[\operatorname{dimana} G^{t+\delta t} = \left( -u \frac{\partial u}{\partial x} - g \frac{\partial \eta}{\partial x} \right)^{t-2\delta t}\] \[\eta =\] \[\operatorname{fluktuasi}\] \[\operatorname{muka air}\]
u = kecepatan arus pada arah x
h = kedalaman perairan
g = percepatan gravitasi
\(H = h + \eta\)
Persamaan kontinuitas dapat ditulis
Sedangkan persamaan momentum dapat ditulis dalam bentuk
a. Prediktor
a.1. Persamaan kontinuitas
dimana
(u, H)<sup>t-2δt</sup>, (u, H)<sup>t-δt</sup>, dan (u, H)<sup>t</sup>, diperoleh dari perhitungan sebelumnya. Sedangkan pada penelitian ini dihitung dengan menggunakan metoda selisih hingga.
a.2. Persamaan momentum
Gambar 5.3. Kanal untuk eksekusi model
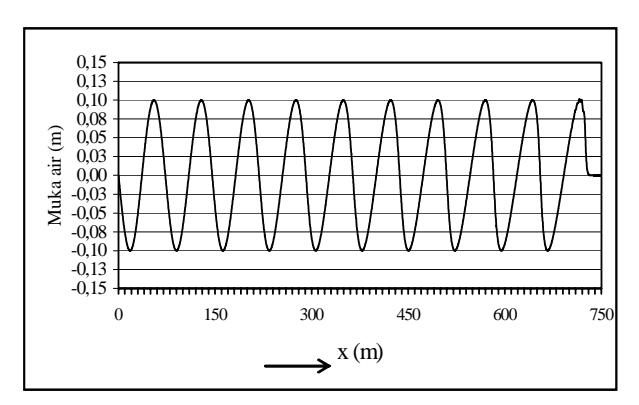
Gambar 5.4. Gelombang sinusiodal pada kanal, hasil simulasi
dimana
\(u^{t-2\delta t}\), \(\eta^{t-2\delta t}\), \(u^{t-\delta t}\), \(\eta^{t-\delta t}\), \(u^t dan \, \eta^t\) diperoleh dari hasil perhitungan sebelumnya. Sedangkan \(\partial u/\partial x\) dan \(\partial \eta/\partial x\) pada penelitian ini dihitung dengan metoda selisih hingga.
b. Korektor
b.1. Persamaan kontinuitas
dimana \(u^{t-\delta t}\) dan \(\eta^{t-\delta t}\) diperoleh dari perhitungan tahap prediktor.
\[\int_{-1}^{1} f(\xi) d\xi = \sum_{i=1}^{n} w_i f(\xi_i^*)\] b.2. Persamaan momentum
sedangkan \(u^{t+\delta t}\) dan \(\eta^{t+\delta t}\) diperoleh dari perhitungan pada tahap prediktor.
Sebagai contoh perhitungan, model dikerjakan pada perhitungan gelombang pada kanal (Gambar 5.3). Perioda gelombang 6 detik, amplitudo 0.1 m, sedangkan kedalaman kanal h = 15.0 m. Berdasarkan kajian Le Mehaute [Mei, Méhauté, 1966], persamaan gelombang Airy ini untuk gelombang pendek hanya dapat digunakan untuk tinggi gelombang yang sangat kecil. Pada perhitungan ini F (u, H) = \(-\partial(uH)/\partial x\) dan \(G(u, \eta) = -u \partial u/\partial x - g \partial \eta/\partial x\) dihitung dengan menggunakan metoda selisih hingga. Hasil perhitungan disajikan pada Gambar 5.4.
Seperti terlihat pada Gambar 5.4, model memberikan solusi yang stabil, hal ini terlihat pada kurva gelombang yang stabil pada eksekusi 9 x perioda gelombang, sering terjadi ketidak stabilan kurva terjadi setelah eksekusi 3 atau 4 kali perioda gelombang. Hal
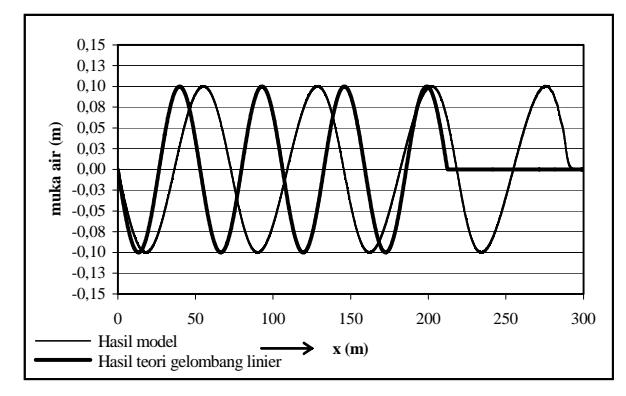
Gambar 5.5. Perbandingan antara teori gelombang linier dengan model

Gambar 6.1. Posisi titik integrasi terhadap titik waktu (φ) perhitungan
ini dapat terjadi akibat metoda numeris (penyelesaian diferensial waktu) yang kurang baik. Selain itu perhitungan gelombang pendek dengan persamaan gelombang Airy adalah jauh lebih sulit daripada
perhitungan gelombang panjang, \[\mathbf{u}^{t+\delta t} = \mathbf{u}^t + \frac{\delta t}{12} \left( 23 \, G^t - 16 \, G^{t+\delta t} + 5 \, G^{t+2\delta t} \right)\] \[\eta^{t+\delta t} = \eta^t + \frac{\delta t}{12} \left( 23 \, F^t - 16 \, F^{t+\delta t} + 5 \, F^{t+2\delta t} \right)\] m i s a 1 gelombang pasang surut dengan perioda 24 jam atau 86400 detik. \[\mathbf{u}^{t+\delta t} = \mathbf{u}^t + \frac{\delta t}{24} \left( 9 \, G^{t+\delta t} + 19 \, G^t - 5 \, G^{t+\delta t} + G^{t+2\delta t} \right)\] S o 1 u s i
Solusi \[\frac{1}{24} \left( 9G^{t+\delta t} + 19G^{t} - 5G^{t+\delta t} + G^{t+\delta t} \right)\] \[\eta^{t+\delta t} = \eta^{t} + \frac{\delta t}{24} \left( 9F^{t+\delta t} + 19F^{t} - 5F^{t+\delta t} + F^{t+2\delta t} \right)\] analitik
berdasarkan teori gelombang linier dapat ditulis dalam bentuk sinusoidal : \(\eta(x, t) = A \sin(kx - \sigma t)\)
dimana:
\[A = \int_{t+\delta t}^{t+\delta t} - u^{t} = \int_{t}^{t+\delta t} \frac{\partial u}{\partial t} dt = \int_{t}^{t+\delta t} f(u) dt\] a m p l i t u d o
gelombang; \[k = \int_{t}^{t+\delta t} f(u) dt\] bilangan
\(\sigma = 2\pi / T = \text{frekuensi sudut}\); T = perioda gelombang
Untuk gelombang dengan perioda 6 detik, dan pada kedalaman perairan 15.0 m, mempunyai panjang gelombang 53 m berdasarkan teori geombang linier. Terlihat pada Gambar 5.5., bahwa gelombang yang dihasilkan model lebih panjang dari teori gelombang linier. Berdasarkan [Hutahaean, dkk., 2005], panjang gelombang dari teori gelombang linier memang masih perlu dilakukan koreksi.
6. Diskusi
Seperti telah disebutkan bahwa metoda yang dikembangkan adalah serupa dengan metoda Gaussian-quadrature yang berbentuk [Burden, Douglas, 1985]
dimana \(w_i\) disebut dengan koefisien bobot, sedangkan \(\xi_i^*\) adalah titik integrasi. Berdasarkan [Frank, 1986], titik integrasi pada metoda Gaussian-quadrature adalah seperti disajikan pada Tabel 6.1. Seperti terlihat pada Tabel 6.1. tersebut, koordinat titik integrasi bukan berupa bilangan yang sederhana, demikian juga dengan intervalnya. Sehingga untuk penggunaannya pada integrasi waktu sulit untuk mengkaitkannya
Tabel 6.1. Titik integrasi pada metoda Gaussian-quadrature
| \[\int_{-1}^{1} f(\xi) d\xi = \sum_{i=1}^{n} w_i f(\xi_i^*)\] | ||
|---|---|---|
| \[\boldsymbol{\xi}_1^*\] | \(w_i\) | |
| 0.0000000000000000 | n = 1 | 2.000000000000000 |
| + 0.577350269189626 | n = 2 | 1.000000000000000 |
| 0.000000000000000000000000000000000000 | n = 3 | 0.88888888888889 0.5555555555556 |
| ± 0.339981043584856 ± 0.861136311594053 | n = 4 | 0.652145154862546 0.347854845137454 |
| 0.00000000000000000000000000000000000 | n = 5 | 0.56888888888888 0.478628670499366 0.236926885056189 |
| ± 0.238619186083197 ± 0.661209389466265 ± 0.932469514203152 | n = 6 | 0.467913934572691 0.360761573048139 0.171324492379170 |
dengan posisi t1, t2, t3 ….. dst. seperti terlihat pada Gambar 6.1., maka terlihat bahwa titik integrasi tidak tepat berada pada titik waktu perhitungan.
Oleh karena itu bila digunakan metoda Gaussianquadrature, perlu dilakukan interpolasi untuk menghitung harga-harga f (ξ1*),f (ξ2*),f (ξ3*)….. dst. Hal ini selain menambah proses perhitungan juga akan mengurangi ketelitian. Metoda prediktor-korektor yang dikembangkan mirip dengan metoda prediktorkorektor dari Adams – Bashforth – Moulton yang digunakan oleh Y.S Li, dkk [Li, Liu, Yu, Lai, 1999] serta Nwogu [Nwogu, 1993] dalam menyelesaikan persamaan Boussinesq. Adapun bentuk persamaan dari Adams – Bashforth – Moulton tersebut adalah [Burden, Douglas, 1985], [Li, Liu, Yu, Lai, 1999], dan [Nwogu, 1993].
Prediktor :
Korektor :
Perbedaan dengan metoda yang dikembangkan adalah pada harga koefisien integrasi. Metoda Adams – Bashforth – Moulton ini juga diturunkan berdasarkan metoda integrasi, yaitu
Selanjutnya penyelesaian diselesaikan
metoda backward-difference dari Newton, dan diperoleh koefisien-koefisien integrasi. Untuk penjelasan lebih rinci, dapat dilihat pada ref [Burden, Douglas, 1985]. Mengenai metoda yang mana yang lebih baik, diluar lingkup penelitian ini. Maksud dari paper ini hanyalah mengemukakan alternatif metoda penyelesaian persamaan diferensial waktu nonlinier.
7. Kesimpulan
Dari penelitian yang telah dilakukan, dapat diambil kesimpulan bahwa
- a. Metoda integrasi numeris yang dikembangkan memberikan hasil yang cukup baik, sangat dekat dengan hasil eksak, dengan kesalahan 0.0002% - 0.5%.
- b. Semakin banyak titik polinomial atau titik integrasi yang digunakan diperoleh hasil integrasi yang semakin baik.
- c. Persamaan differensial waktu dapat diselesaikan dengan metoda integrasi, dimana integrasi waktu dapat dilakukan secara numeris.
Integrasi Numeris dengan Menggunakan Polinomial Lagrange