
1. Pendahuluan
Penelitian mengenai model matematika untuk melakukan analisis hidrodinamika gelombang masih terus dilakukan. Salah satu persamaan yang banyak mendapat perhatian dari peneliti (1) (2) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (15), adalah persamaan Boussinesq.
Persamaan Boussinesq mempunyai bentuk dasar yang sama dengan persamaan gelombang Airy, dimana persamaan gelombang Airy diturunkan dari persamaan Euler dengan sejumlah penyederhanaan. Persamaan gelombang Airy sendiri mempunyai sejumlah keterbatasan (Hutahaean, 2005), oleh karena itu diharapkan akan diperoleh model yang lebih baik apabila dilakukan pemodelan dengan langsung menggunakan persamaan Euler. Dalam penelitian baik secara analitik maupun numeris, didapatkan dua buah hal yang harus diperbaiki pada persamaan Euler, yaitu persamaan ini memberikan distribusi kecepatan horisontal pada sepanjang kedalaman yang hampir
seragam atau kecepatan horisontal pada semua titik pada kedalaman hampir sama. Hal kedua yang juga merupakan kelemahan adalah panjang gelombang yang dihasilkan adalah terlalu besar dibandingkan dengan panjang gelombang dari teori gelombang linier, terlebih lagi bila dibandingkan dengan teori gelombang Stoke orke ke 5.
Pada penelitian ini dihasilkan suatu koefisien pada gaya penggerak arah horisontal, sehingga diperoleh distribusi kecepatan yang mendekati teori gelombang linier, demikian juga dengan panjang gelombangnya.
Koefisien tersebut dikerjakan pada persamaan gelombang Airy dan dihasilkan panjang gelombang yang sama dengan panjang gelombang dari teori gelombang linier.
2. Persamaan Euler
Persamaan Euler adalah persamaan Navier-Stoke dengan mengabaikan viskositas air. Persamaan ini
Catatan : Usulan makalah dikirimkan pada 6 Juni 2006 dan dinilai oleh peer reviewer pada tanggal 17 Juli 2006 - 25 Agustus 2006. Revisi penulisan dilakukan antara tanggal 28 Agustus 2006 hingga 4 Oktober 2006.
1. Staf Pengajar PST Kelautan-ITB
terdiri dari 3 buah persamaan, yaitu arah horisontal (arah x dan y) dan arah vertikal (arah z), yaitu (Dean, and Dalrymple) sebagai berikut
\[\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} = -\frac{1}{\rho} \frac{\partial p}{\partial x}\] (2.1a)
\[\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + w \frac{\partial v}{\partial z} = -\frac{1}{\rho} \frac{\partial p}{\partial y}\] (2.1b)
\[\frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z} = -\frac{1}{\rho} \frac{\partial p}{\partial y} - g \quad (2.1c)\]
dimana:
u = kecepatan arus arah horisontal, arah x
kecepatan arus arah horisontal, arah y
= kecepatan arus arah vertikal, arah z
= rapat masa air
Integrasi Persamaan (2.1c) dari z = z sampai \(z = \eta\), dihasilkan
\[\frac{1}{\rho} (p_{\eta} - p_{z}) = -\int_{z}^{\eta} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz\]\[-\frac{1}{2} (w_{\eta}^{2} - w_{z}^{2}) - g (\eta - z)\]
Dengan mengambil tekanan atmosfir sebagai tekanan acuan, maka \(p_n = 0\). indeks z pada \(p_z\) ditulis sebagai p, dimana p = p(x, y, z).
\[\frac{1}{\rho} p = \int_{z}^{\eta} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz + \frac{1}{2} \left( w_{\eta}^{2} - w_{z}^{2} \right) - g \left( \eta - z \right)\] (2.2)
Persamaan (2.2) diturunkan terhadap x,
\[\frac{1}{\rho} \frac{\partial p}{\partial x} = \frac{\partial}{\partial x} \int_{z}^{\eta} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz + \frac{1}{2} \frac{\partial}{\partial x} \left( w_{\eta}^{2} - w_{z}^{2} \right) + g \frac{\partial \eta}{\partial x}\] (2.3a)
Persamaan (2.2) diturunkan terhadap y,
\[\frac{1}{\rho} \frac{\partial p}{\partial y} = \frac{\partial}{\partial y} \int_{z}^{\eta} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz\] \[+ \frac{1}{2} \frac{\partial}{\partial x} \left( w_{\eta}^{2} - w_{z}^{2} \right) + g \frac{\partial \eta}{\partial y} \tag{2.3b}\]
Sustitusi Persamaan (2.3a) ke Persamaan (2.1a) dan Persamaan (2.3b) ke Persamaan (2.1b) diperoleh
\[\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + w \frac{\partial v}{\partial z} = -\frac{1}{\rho} \frac{\partial p}{\partial y} \qquad (2.1b) \qquad \frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} = -\frac{1}{\rho} \frac{\partial p}{\partial y} - g \qquad (2.1c) \qquad \left(\frac{\partial}{\partial x} \int_{z}^{\eta} \left(\frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + v \frac{\partial w}{\partial y}\right) dz + \frac{1}{2} \left(w_{\eta}^{2} - w_{z}^{2}\right) - g \left(\eta - z\right) \right) \qquad (2.4a)\] dimana: \[u = \text{ kecepatan arus arah horisontal, arah x}\] \[v = \text{ kecepatan arus arah horisontal, arah x}\] \[v = \text{ kecepatan arus arah horisontal, arah y}\] \[w = \text{ kecepatan arus arah vertikal, arah z}\] \[\rho = \text{ rapat masa air}\] \[\ln tegrasi \text{ Persamaan (2.1c) dari } z = z \text{ sampai } z = \eta, \qquad \left(\frac{\partial}{\partial y} \int_{z}^{\eta} \left(\frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + v \frac{\partial w}{\partial y}\right) dz + \frac{1}{2} \frac{\partial}{\partial y} \left(w_{\eta}^{2} - w_{z}^{2}\right) + g \frac{\partial \eta}{\partial y} \right) \qquad (2.4b)\]
u, v dan w adalah suatu fungsi yang periodik pada ruang dan waktu dan berupa kurva yang smooth serta kontinu, sehingga turunan fungsi tersebut baik terhadap ruang maupun waktu adalah bilangan yang kecil. Perkalian fungsi (u, v dan w) dengan turunannya akan menjadi bilangan yang lebih kecil lagi. Integrasi pada Persamaan (2.4a) dan (2.4b), mungkin menghasilkan bilangan yang besar, tetapi juga merupakan fungsi yang smooth dan kontinu, sehingga turunan hasil integrasi tersebut juga merupakan bilangan yang kecil. Elevasi muka air \(\eta\), juga merupakan fungsi yang smooth dan kontinu terhadap ruang dan waktu, dimana
\[\frac{\partial \eta}{\partial x}\] dan \(\frac{\partial \eta}{\partial y}\) juga merupakan bilangan yang kecil.
Tetapi karena ada faktor pengali g, maka \(g\frac{\partial \eta}{\partial x}\) dan \(g\frac{\partial \eta}{\partial y}\)
Gambar 2.1. Fluktuasi muka air pada persamaan Euler
akan jauh lebih besar dari suku lainnya pada Persamaan (2.4a) dan (2.4b) atau dengan kata lain
tekanan hidrostatis \[\left(g \frac{\partial \eta}{\partial x} \text{ dan } g \frac{\partial \eta}{\partial y}\right)\] adalah gaya
penggerak yang dominan pada kedua persamaan tersebut.
Kedua gaya hidrostatis tersebut bukan merupakan fungsi kedalaman. Semua titik di bawah permukaan mendapatkan gaya hidrostatis yang sama. Dari kedua hal tersebut yaitu tekanan hidrostatis adalah gaya yang dominan dibandingkan dengan gaya hidrodinamis, dan semua titik di bawah permukaan mengalami gaya hidrostatis yang sama, maka kecepatan horisontal (u dan v) akan mempunyai distribusi yang hampir seragam pada sepanjang kedalaman, tidak peduli berapa besar kedalamannya.
Sementara itu hal yang terjadi di alam adalah pada titik-titik dengan posisi vertikal yang berbeda mempunyai kecepatan horisontal yang berbeda. Semakin dalam posisi suatu titik semakin kecil kecepatannya, dimana pada posisi kedalaman tertentu akan menjadi nol. Hal ini juga ditunjukkan oleh gelombang linier.
Jadi secara analitik, terlihat bahwa pada persamaan Euler terdapat suatu kekurangan, yaitu tidak dapat menghasilkan distribusi kecepatan yang baik, hal ini juga akan ditunjukkan pada hasil analisis numerik pada bagian berikut.
3. Analisis Numeris
Persamaan kontinuitas dan persamaan Euler pada bagian ini akan diselesaikan secara numeris. Mengingat paper ini tidak bermaksud membahas metoda numeriknya, maka pembahasan hanya dimaksudkan untuk sekedar memberikan gambaran mengenai metoda numeris yang digunakan.
a. Persamaan kontinuitas
\[\frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} + \frac{\partial w}{\partial z} = 0\]
Integrasi terhadap kedalaman menghasilkan
\[\int_{a}^{\eta} \partial w = -\int_{a}^{\eta} \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) dz\]
\[w_{\eta} - w_{-h} = -\int_{-h}^{\eta} \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) dz\]
Syarat batas kinematik pada permukaan dan dasar perairan (Dean, and Dalrymple),
\[w_{\eta} = \frac{\partial \eta}{\partial t} + u_{\eta} \frac{\partial \eta}{\partial x} + v_{\eta} \frac{\partial \eta}{\partial y}\]\[w_{-h} = -u_{-h} \frac{\partial h}{\partial x} - v_{-h} \frac{\partial h}{\partial y}\]
Dengan menggunakan ke 2 syarat batas kinematik tersebut, diperoleh persamaan muka air yaitu.
\[\frac{\partial \eta}{\partial t} = -\int_{-h}^{\eta} \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) dz - u_{-h} \frac{\partial h}{\partial x} - v_{-h} \frac{\partial h}{\partial y} - u_{\eta} \frac{\partial \eta}{\partial x} - v_{\eta} \frac{\partial \eta}{\partial y}\] (3.1a)
Diferensial ruang \(\partial/\partial x\) dan \(\partial/\partial y\) diselesaikan dengan metoda selisih hingga, sedangkan integrasi diselesaikan secara numeris, yaitu dengan menggunakan metoda Newton – Cates (Hutahaean, 2005). Mengingat pada batas integrasi terdapat bilangan \(\eta\), dimana pada saat \(t = t + \partial t\) harga \(\eta\) adalah bilangan yang tidak diketahui, demikian juga dengan \(u^{t+\partial t}\) dan \(v^{t+\partial t}\), maka Persamaan (3.1a) bersama-sama dengan persamaan momentum disesaikan dengan metoda prediktor-korektor (Hutahaean, 2005).
Setelah diperoleh \(u^{t+\delta t}\), \(v^{t+\delta t}\) dan \(w_{\eta}\), kecepatan arus arah vertikal pada setiap posisi w=w (x, y, z) dihitung dengan mengintegrasikan persamaan kontinuitas dari \(z \to \eta\).
\[\int_{z}^{\eta} \partial w = -\int_{z}^{\eta} \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) dz\] \[w_{z} = w_{\eta} + \int_{z}^{\eta} \left( \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} \right) dz\] (3.1b)
Persamaan (3.1b), Persamaan (3.1a) dan persamaan momentum diselesaikan secara prediktor–korektor.
Kecepatan horisontal u dan v dihitung dengan menggunakan Persamaan (2.1a) dan (2.1b). Tekanan p = p (x, y, z) dihitung dengan mengintegrasikan persamaan momentum arah z dari \(z = z \rightarrow z = \eta\), seperti pada Persamaan (2.2) dimana integrasi dilakukan secara numeris.
Pada Gambar (2.2), hasil dari penyelesaian persamaan Euler secara numeris, terlihat bahwa kecepatan hampir seragam pada seluruh kedalaman. Dibandingkan dengan hasil teori gelombang linier (Gambar 2.3), terlihat terdapat dua perbedaan yang menyolok yaitu distribusi kecepatan dan panjang gelombang, dimana hasil numeris memberikan panjang gelombang yang lebih besar. Panjang gelombang dari teori gelombang linier sendiri, dibandingkan dengan teori gelombang Stoke orde 5, adalah lebih besar. Jadi dapat disimpulkan bahwa panjang gelombang hasil penyelesaian persamaan Euler adalah terlalu panjang.
Gambar 2.2. Kecepatan horisontal (u sebagai fungsi x) hasil numeris, pada kedalaman z = 5, 10, 15 m, untuk kedalaman perairan 30 m
Gambar 2.3. Distribusi kecepatan horisontal (u sebagai fungsi x) hasil teori gelombang linier, pada kedalaman z = 5, 10, 15 m, untuk kedalaman perairan 30 m
Ditinjau dari distribusi kecepatan horisontal yang hampir seragam, hal ini adalah menunjukkan karakteristik gelombang panjang, dimana h/L << 1 (h = kedalaman perairan, L = panjang gelombang), dimana teori gelombang linier bila dikerjakan pada perairan dangkal juga akan menghasilkan distribusi kecepatan yang hampir seragam.
Dari tinjauan analitik, maupun numerik terbukti bahwa gelombang persamaan Euler adalah merupakan persamaan gelombang panjang. Untuk dapat digunakan pada analisis gelombang pendek, perlu dilakukan suatu koreksi agar diperoleh distribusi kecepatan dan panjang gelombang yang sesuai dimana dalam hal ini dilakukan penyesuaian terhadap teori gelombang linier diperairan dalam. Hal ini mengingat teori gelombang linier memberikan hasil yang baik pada perairan dalam.
4. Pengembangan
Dari hasil gelombang linier, terlihat bahwa semakin jauh posisi suatu titik tinjau dari permukaan, semakin kecil kecepatannya, sedangkan pengaruh karakteristik gelombang adalah semakin besar perioda gelombang semakin besar pengaruhnya pada bagian di bawah
permukaan air. Dari kedua hal tersebut maka gaya penggerak air, semakin jauh posisinya dari muka air akan semakin kecil, sedangkan semakin besar perioda gelombang semakin gaya penggeraknya pada bagian yang lebih dalam. Sebagai gaya penggerak air pada arah horisontal adalah \(\partial p/\partial x\) dan \(\partial p/\partial y\), Untuk memasukkan pengaruh kedalaman dan perioda gelombang terhadap arus, maka pada gaya penggerak tersebut merupakan fungsi dari posisi (kedalaman) dan perioda gelombang. Mengenai fenomena fisiknya, perlu dilakukan suatu penelitian tersendiri. Pada penelitian ini dilakukan dengan cara coba-coba, yaitu dengan mengalikan gaya penggerak horisontal dengan statu koefisien yang merupakan fungsi dari kedalaman dan perioda gelombang, yaitu sebagai berikut.
\[\alpha = \left( 1 - \tanh \left( \beta k_0 |z| \right) \right)\] \[k_0 = \frac{\sigma^2}{g}, \ \sigma = \frac{2\pi}{T}\] (3.2)
T = periode gelombang
\(\beta\) = konstanta yang diperoleh dari proses kalibrasi terhadap teori gelombang linier, diperoleh \(\beta\) = 0.64
Pada persamaan koefisien tersebut terlihat bahwa semakin jauh posisi suatu titik terhadap muka air harga koefisien semakin kecil, dimana pada suatu kedalaman tertentu tanh \((k_o/z/)\) akan mencapai harga konstan 1, sedangkan harga \(\alpha=0\) atau kecepatan arus pada kedalaman tersebut menjadi 0. Sedangkan semakin besar perioda gelombang harga koefisien semakin besar. Untuk gelombang pasang surut dengan perioda gelombang yang sangat besar harga \(k_o=0\) dan \(\alpha=1\), sehingga persamaan kembali ke persamaan gelombang panjang dengan distribusi kecepatan seragam. Dengan menggunakan koefisien tersebut, maka persamaan momentum arah x dan arah y menjadi:
\[\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} = -\frac{\alpha}{p} \frac{\partial p}{\partial x}\]\[\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + w \frac{\partial v}{\partial z} = -\frac{\alpha}{p} \frac{\partial p}{\partial y}\]
sedangkan pada persamaan momentum arah z tidak ada perubahan.
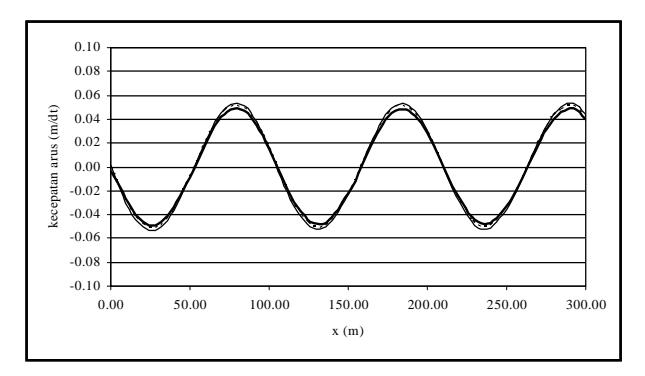
Dengan menggunakan persamaan momentum yang baru tersebut, diperoleh hasil seperti pada Gambar 2.4. Dibandingkan dengan hasil dari teori gelombang linier, maka hasil tersebut cukup dekat. Adapun akibat lain dari penggunaan koefisien tersebut adalah panjang gelombang menjadi pendek dan mendekati teori gelombang linier.
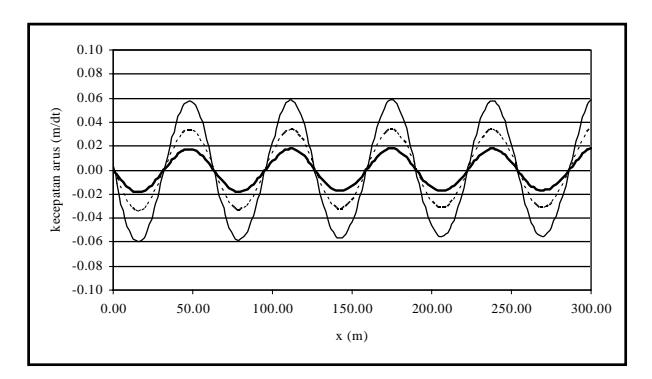
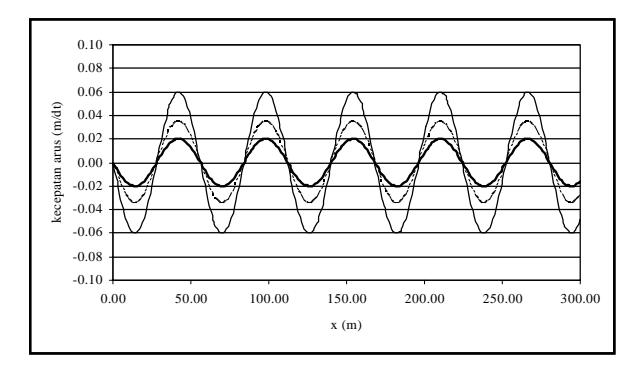
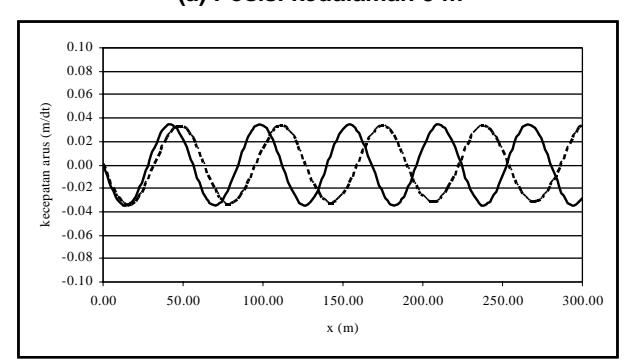
Gambar 2.4. Distribusi vertikal kecepatan horisontal (u sebagai fungsi x) hasil numeris dengan persamaan momentum yang telah dikoreksi, pada kedalaman z = 5, 10, 15 m, untuk kedalaman perairan 30 m
(a) Posisi kedalaman 5 m
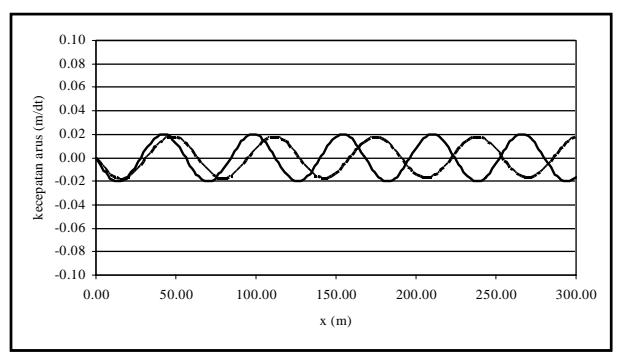
(b) Posisi kedalaman 10 m
(c) Posisi kedalaman 15 m
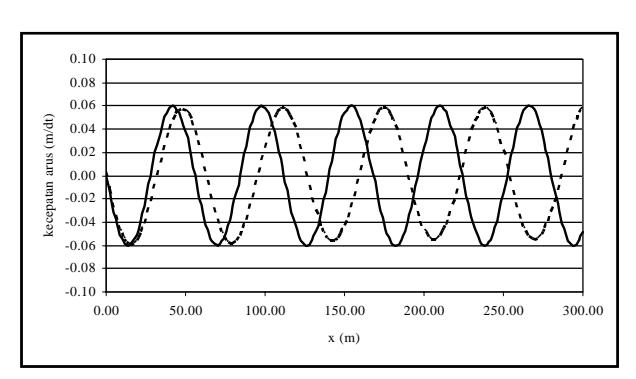
Gambar 2.5. Perbandingan antara teori gelombang linier dengan persamaan yang diperbaiki
Pada Gambar (2.5) disajikan perbandingan antara hasil teori gelombang linier dengan hasil persamaan yang diperbaiki. Terlihat bahwa besar kecepatan pada posisi kedalaman 5 m, 10 m, dan 15 m di bawah permukaan dari kedua persamaan tersebut adalah sama, tetapi panjang gelombang hasil numeris masih lebih panjang, walaupun banyak berkurang dibandingkan dengan hasil dari persamaan original. Pada bagian berikut akan ditunjukkan bahwa pengerjaan koefisien yang sama pada persamaan gelombang Airy memberikan panjang gelombang yang sama dengan panjang gelombang teori gelombang linier.
5. Koefisien Momentum pada Persamaan Gelombang Airy
Persamaan momentum pada persamaan gelombang Airy, diperoleh dengan mengintegrasikan persamaan Euler terhadap kedalaman (Dean, and Dalrymple). Dengan menggunakan koefisien koreksi pada persamaan Euler, maka persamaan momentum dari gelombang Airy menjadi sebagai berikut
\[\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + (\gamma) g \frac{\partial \eta}{\partial x} = 0\] (5.1)
\[\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + (\gamma) g \frac{\partial \eta}{\partial y} = 0\]
\[\frac{1}{H} \int_{-h}^{\eta} \left( 1 - \tanh\left(0.64 k_o |z| \right) \right) dz \tag{5.2}\]
\[\gamma = \frac{1}{H} \int_{0}^{h+\eta} \left(1 - \tanh\left(0.64 k_{o} r\right)\right) dz\] (5.3)
dimana : r = |z|
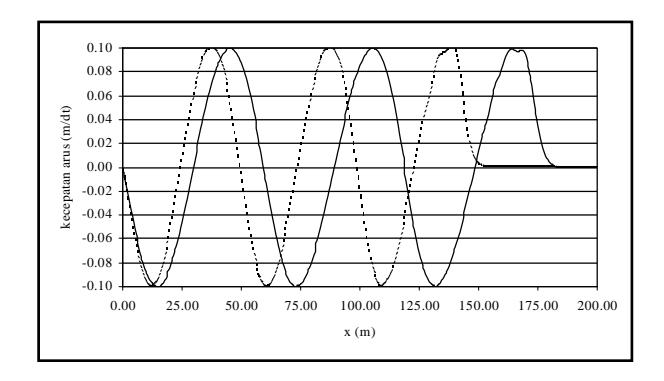
Gambar 2.6. Perbandingan antara persamaan gelombang Airy original dengan gelombang Airy yang diperbaiki
Hasil analisis dengan persamaan momentum yang lain ini disajikan pada Gambar (2.6) dan (2.7). Pada gambar (2.6) diperlihatkan perbandingan antara hasil dari persamaan original dengan hasil persamaan yang baru, terlihat bahwa persamaan yang baru memberikan panjang gelombang yang lebih kecil dari panjang gelombang persamaan original, Sedangkan pada Gambar (2.7) disajikan perbandingan antara hasil persamaan baru dengan hasil teori gelombang linier dan terlihat keduanya mempunyai panjang gelombang yang sama.
6. Analisis dan Kesimpulan
Pada penelitian ini didapatkan bahwa dengan proses integrasi kedalaman yang dilakukan yaitu \(\mathring{J}_{\alpha}\)
memberikan hasil bahwa kecepatan arus arah horizontal mempunyai distribusi yang hampir seragam. Tetapi bila pada suku tekanan pada persamaan momentum dikalikan dengan koefsien seperti pada Persamaan (3.2), maka dihasilkan distribusi kecepatan yang sama dengan yang dihasilkan oleh teori gelombang linier. Hal yang sama dilakukan pada persamaan gelombang Airy, dihasilkan panjang gelombang yang sama dengan panjang gelombang teori gelombang linier.
Dari kedua hal tersebut dapat diambil suatu kesimpulan bahwa \(\int_{-d}^{d}\) pada persamaan momentum arah z menimbulkan tekanan hidrostatis sebesar \(\rho\) g \(\eta\), sedangkan yang sebenarnya terjadi, \(\eta\) adalah berubah terus-menerus dengan tekanan yang diberikan tidak sebesar \(\rho\) g \(\eta\).
Dari hasil penelitian ini juga diperkirakan untuk menghitung tekanan dengan mengintegrasikan persamaan momentum arah z, batas atas integrasi tidaklah \(\eta\) melainkan \(\alpha\) \(\eta\), dimana \(\alpha\) merupakan suatu fungsi karakteristik gelombang dan kedalaman z, makin besar \(\alpha\) haruslah lebih kecil.
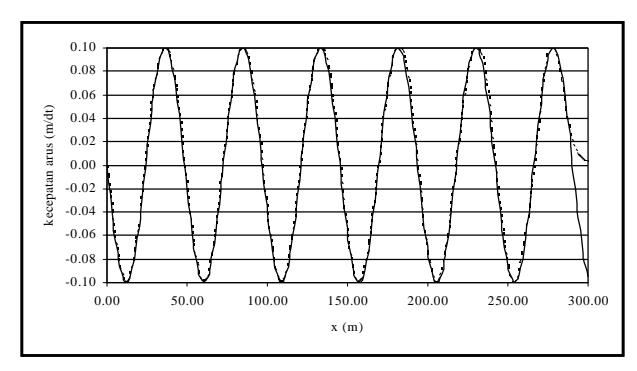
Gambar 2.7. Perbandingan antara persamaan gelombang linier dengan gelombang Airy yang diperbaiki