
1. Latar Belakang
Persamaan gelombang Airy, walaupun dikenal sebagai persamaan gelombang panjang dapat digunakan juga untuk memodelkan gelombang pendek, walaupun dengan tinggi gelombang yang sangat kecil (Syawaluddin, H., dkk., 2005).
Persamaan kontinuitas pada persamaan gelombang panjang Airy diperoleh dari pengerjaan hukum kekekalan masa. Walaupun persamaan tersebut diturunkan dari hukum kekekalan masa, tetapi terdapat peristiwa transportasi energi pada persamaan ini, yaitu terjadinya perubahan energi kinetik menjadi energi potensial. Perubahan dari energi potensial dinyatakan pada perubahan elevasi muka air. Jadi persamaan kontinuitas selain mewakili hukum kekekalan masa, juga harus mewakili hukum kekekalan energi.
Dengan persamaan kontinuitas yang bersifat seperti ini maka diharapkan dapat digunakan untuk memodelkan gelombang untuk tinggi gelombang yang besar, sesuai dengan keadaan di alam.
2. Perumusan Persamaan
2.1 Bentuk umum
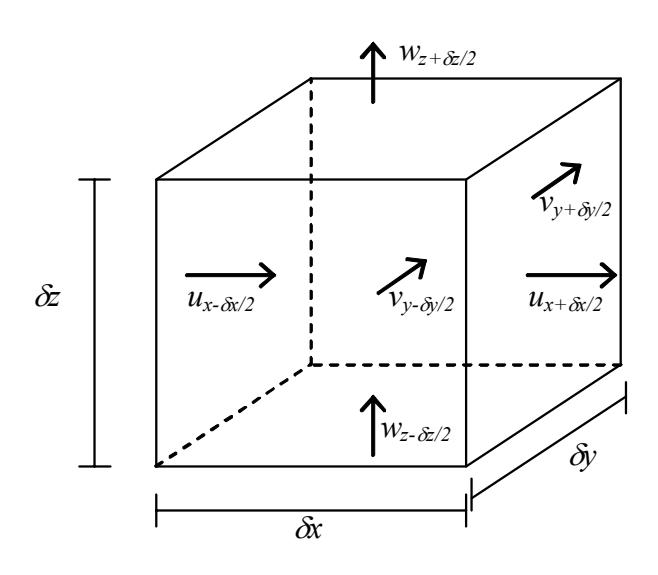
Gambar 2.1. Persamaan kekekalan energi
Catatan : Usulan makalah dikirimkan pada 15 Desember 2006 dan dinilai oleh peer reviewer pada tanggal 13 Pebruari 2007 - 13 Maret 2007. Revisi penulisan dilakukan antara tanggal 6 Maret 2007 hingga 16 Maret 2007.
1. Staf Pengajar KK Kelautan, Fakultas Teknik Sipil dan Lingkungan-ITB.
Energi kinetik pada satu satuan masa air pada aliran
air adalah \[E_{kx} = \rho \frac{u^2}{2g}\], \(E_{ky} = \rho \frac{v^2}{2g}\), \(E_{kz} = \rho \frac{w^2}{2g}\)
dimana \(\rho\) adalah rapat masa air, u, v dan w adalah kecepatan arus pada arah x, y dan z. Pada ruang tinjauan pada Gambar 2.1, terdapat input-output energi kinetik pada selang waktu \(\delta t\), yaitu:
\[\begin{split} \text{IO} &= \rho \; \text{dy} \; \text{dz} \; \text{dt} \; \left( u_{x-\delta x/2} \; E_{x-\delta x/2}^{k x} - u_{x+\delta x/2} \; E_{x+\delta x/2}^{k x} \right) + \\ & \rho \; \text{dx} \; \text{dz} \; \text{dt} \; \left( v_{y-\delta y/2} \; E_{y-\delta y/2}^{k y} - v_{y+\delta y/2} \; E_{y+\delta y/2}^{k y} \right) + \\ & \rho \; \text{dz} \; \text{dz} \; \text{dt} \; \left( w_{z-\delta z/2} \; E_{z-\delta z/2}^{k z} - w_{z+\delta z/2} \; E_{z+\delta z/2}^{k z} \right) \end{split}\]
Perubahan energi kinetik pada sistim adalah
\[\Delta E = \rho \, \delta x \, \delta y \, \delta z \, \left( \delta E_{kx} + \delta E_{ky} + \delta E_{kz} \right)\]
Berdasarkan hukum kekekalan, maka \(IO = \Delta E\)
Dengan membagi ruas kiri dan kanan persamaan kekekalan dengan \(\rho\) \(\delta x\) \(\delta y\) \(\delta z\) dan \(\delta t\) serta dengan mengambil \(\delta x \delta y \delta z\) dan \(\delta t\) mendekati nol, maka diperoleh persamaan kekekalan energi adalah
\[\frac{\partial E_{kx}}{\partial t} + \frac{\partial E_{ky}}{\partial t} + \frac{\partial E_{kx}}{\partial t} + \frac{\partial uE_{kx}}{\partial x} + \frac{\partial vE_{ky}}{\partial y} + \frac{\partial wE_{kz}}{\partial z} = 0\] \[\tag{1}\]
Persamaan (1) adalah persamaan kekekalan energi dalam bentuk umum.
2.2 Bentuk terintegrasi terhadap kedalaman
Analisis hidrodinamik akan lebih mudah bila dilakukan dengan analisis terintegrasi terhadap kedalaman, terutama untuk analisis pada perairan dangkal. Pada metoda ini digunakan kecepatan ratarata kedalaman dimana kecepatan vertikal (w) tereliminir sehingga hanya ada dua kecepatan vaitu kecepatan horizontal ara x dan y yaitu \(\bar{u}\) dan v.
Sebagai contoh dari persamaan yang terintegrasi terhadap kedalaman adalah persamaan gelombang panjang dari Airy (Dean, Robert G., and Dalrymple). Agar persamaan kekekalan energi dapat diaplikasikan pada analisis hidrodinamika yang terintegrasi terhadap kedalaman, maka diperlukan bentuk persamaan kekekalan energi yang juga terintegrasi terhadap kedalaman yang akan dirumuskan pada bagian berikut. Persamaan (1) diintegrasikan terhadap kedalaman, n = fluktuasi muka air terhadap muka air diam
\[\int_{-h}^{\eta} \left( \frac{\partial E_{kx}}{\partial t} + \frac{\partial E_{ky}}{\partial t} + \frac{\partial E_{ky}}{\partial t} + \frac{\partial E_{kx}}{\partial t} + \frac{\partial u E_{kx}}{\partial x} + \frac{\partial v E_{ky}}{\partial y} + \frac{\partial w E_{kz}}{\partial z} \right) dz = 0\]
Gambar 2.2. Sket muka air akibat gelombang
Aturan Leibniz (Dean, Robert G., and Dalrymple),
\[\int_{\alpha}^{\beta} \frac{\partial f}{\partial x} dz = \frac{\partial}{\partial x} \int_{\alpha}^{\beta} f dz - f_{\beta} \frac{\partial \beta}{\partial x} + f_{\alpha} \frac{\partial \alpha}{\partial x}\] (2)
\[\int_{-h}^{\eta} \frac{\partial E_{kx}}{\partial t} = \frac{\partial}{\partial t} \int_{-h}^{\eta} E_{kx} dz - E_{kx}^{\eta} \frac{\partial \eta}{\partial t} + E_{kx}^{-h} \frac{\partial (-h)}{\partial t}\](3)
Berdasarkan persamaan Euler, persamaan pada permukaan adalah
\[\left(\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z}\right)_{z=\eta} = -\frac{1}{\rho} \frac{\partial p_{\eta}}{\partial x}\]
Svarat batas dinamik adalah bahwa tekanan pada permukaan adalah sama pada semua permukaan yaitu bekerja tekanan atmosfir. Fluktuasi muka air memberikan perbedaan tekanan atmosfir yang sangat kecil, sehingga pada seluruh permukaan mempunyai tekanan atmosfir yang sama yaitu \(p_n = p_{atm}\), sehingga \(\partial p_n/\partial x = 0\). Dengan demikian persamaan Euler pada permukaan menjadi
\[\left(\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z}\right)_{z=\eta} = 0\]
Perhitungan dengan persamaan ini akan menghasilkan kecepatan permukaan \(u_n\) yang sangat kecil, hampir mendekati nol. Oleh karena itu energi kinetik pada permukaan \((E_{kx}^{\eta})\) dikalikan dengan \(\partial_{\eta}/\partial t\).
\[\frac{\partial \eta}{\partial t}\], \(\left(E_{kx}^{\eta} \frac{\partial \eta}{\partial t}\right)\)
pada Persamaan (3) adalah bilangan yang sangat kecil yang dapat diabaikan. Selanjutnya, pada analisis ini kedalaman adalah suatu harga yang konstan terhadap waktu, sehingga
\[\frac{\partial \left(-h\right)}{\partial t} = 0.\]
Dengan demikian Persamaan (3) menjadi
\[\int_{-h}^{\eta} \frac{\partial E_{kx}}{\partial t} = \frac{\partial}{\partial t} \int_{-h}^{\eta} E_{kx} dz = \frac{1}{2g} \frac{\partial}{\partial t} \int_{-h}^{\eta} u^2 dz\]
Sesuai dengan formulasi persamaan gelombang panjang dari Airy (Dean, Robert G., and Dalrymple), didefinisikan \[\int_{-h}^{\eta} u^2 dz = \alpha (\eta + h) \overline{u}^2\]
dimana \(\bar{u}\) adalah kecepatan rata-rata kedalaman pada arah x, sedangkan \(\alpha\) adalah suatu koefisien yang berharga 0.5 - 1, dalam hal ini digunakan \(\alpha = 1\).
\[\int_{-h}^{\eta} \frac{\partial E_{kx}}{\partial t} = \frac{1}{2g} \frac{\partial}{\partial t} (\eta + h) \overline{u}^{2}\] \[\int_{-h}^{\eta} \frac{\partial E_{kx}}{\partial t} = \frac{\partial}{\partial t} (\eta + h) \overline{E}_{kx} = (\eta + h) \frac{\partial \overline{E}_{kx}}{\partial t} + \overline{E}_{kx} \frac{\partial \eta}{\partial t}\] (4a)
dimana \(\overline{E}\) adalah energi kinetik pada kecepatan ratarata kedalaman.
Dengan cara yang sama akan diperoleh
\[\int_{h}^{\eta} \frac{\partial E_{ky}}{\partial t} = (\eta + h) \frac{\partial E_{ky}}{\partial t} + E_{ky} \frac{\partial \eta}{\partial t}\] (4b)
Selanjutnya, akan diselesaikan \(\int_{1}^{\pi} \frac{\partial E_{kz}}{\partial t} dz\)
\[\int_{-h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{\partial}{\partial t} \int_{-h}^{\eta} E_{kz} dz - E_{kz}^{\eta} \frac{\partial \eta}{\partial t}\]
Syarat batas kinematik
\[w_{\eta} = \frac{\partial \eta}{\partial t} + u_{\eta} \frac{\partial \eta}{\partial x} + v_{\eta} \frac{\partial \eta}{\partial y}\]
Dengan menggunakan anggapan \(u_{\eta}\) dan \(v_{\eta}\) adalah bilangan yang sangat kecil (seperti telah dibahas pada bagian terdahulu), maka
\[u_{\eta} \frac{\partial \eta}{\partial x} \operatorname{dan} v_{\eta} \frac{\partial \eta}{\partial y} \operatorname{adalah}\] bilangan yang sangat kecil yang dapat diabaikan, sehingga syarat batas kinematik permukaan menjadi
\[w_{\eta} = \frac{\partial \eta}{\partial t}\] \[\int_{-h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{\partial}{\partial t} \int_{-h}^{\eta} E_{kz} dz - E_{kz}^{n} \frac{\partial \eta}{\partial t}\] (5)
dengan \(E_{kz}^n = \frac{W_{\eta}^2}{2\alpha}\) dimana seperti pada persamaan
(5) \[w_{\eta} = \frac{\partial \eta}{\partial t}\], maka
\[\int_{h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{\partial}{\partial t} \int_{h}^{\eta} E_{kz} dz - \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\]
Selanjutnya didefinisikan
\[\int_{-h}^{\eta} w^2 dz = \frac{w_{\eta}^2 + w_{-h}^2}{2} (\eta + h)\]
dimana untuk perairan dangkal pendekatan ini masih cukup baik.
\[\int_{-h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{1}{2g} \frac{\partial}{\partial t} \int_{-h}^{\eta} w^{2} dz - \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\] \[\int_{-h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{\partial}{\partial t} \frac{(\eta + h)}{2} \left( E_{kz}^{\eta} + E_{kz}^{-h} \right) - \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\] \[\int_{-h}^{\eta} \frac{\partial E_{kz}}{\partial t} dz = \frac{(\eta + h)}{2} \frac{\partial E_{kz}^{\eta}}{\partial t} + \left( \frac{\eta + h}{2} \right) \frac{\partial E_{kz}^{-h}}{\partial t} + \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\] \[\frac{1}{2} \left( E_{kz}^{\eta} + E_{kz}^{-h} \right) \frac{\partial \eta}{\partial t} - \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\]
Selanjutnya pada bagian berikut diselesaikan
\[\int_{-h}^{\eta} \frac{\partial u E_{kx}}{\partial x} dz \, \operatorname{dan} \int_{-h}^{\eta} \frac{\partial v E_{ky}}{\partial y} dz\] \[\int_{-h}^{\eta} \frac{\partial u E_{kx}}{\partial x} dz = \frac{\partial}{\partial x} \int_{-h}^{\eta} u E_{kx} dz - u_{\eta} E_{kx}^{\eta} \frac{\partial \eta}{\partial x} - u_{-h} E_{kx}^{-h} \frac{\partial \eta}{\partial x}\]
Dengan \(u_n\) bilangan yang sangat kecil, maka
\[u_{\eta} E_{kx}^{\eta} \frac{\partial \eta}{\partial x} = \frac{u_{\eta}^{3}}{2g} \frac{\partial \eta}{\partial x} \approx 0\]
Didefinisikan
\[\int_{-h}^{\eta} u^{3} dz = \beta (\eta + h) \overline{u}^{3}, \text{ dimana } \beta \text{ adalah suatu konstanta}.\]
\[\int_{-h}^{\eta} \frac{\partial u E_{kx}}{\partial x} dz = \beta \frac{\partial}{\partial x} (\eta + h) \overline{u} \overline{E}_{kx} - u_{-h} E_{kx}^{-h} \frac{\partial h}{\partial x}\] (7a)
Dengan cara yang sama akan diperoleh
\[\int_{-h}^{\eta} \frac{\partial v E_{ky}}{\partial y} dz = \beta \frac{\partial}{\partial y} (\eta + h) \overline{v} \overline{E}_{ky} - v_{-h} E_{ky}^{-h} \frac{\partial h}{\partial y}\] (7b)
Selanjutnya \[\int_{-h}^{\eta} \frac{\partial wE_{kz}}{\partial z} dz = \int_{-h}^{\eta} \partial wE_{kz}\]
\[\int_{-h}^{\eta} \partial w E_{kz} = \frac{w_{\eta}^{3}}{2g} - \frac{w_{-h}^{3}}{2g}\] \[\int_{-h}^{\eta} \partial w E_{kz} = \frac{1}{2g} \left(\frac{\partial \eta}{\partial t}\right)^{3} - \frac{1}{2g} w_{-h}^{3}\] (7c)
Dari Persamaan-persamaan (4a), (4b), (6), (7a), (7b) dan (7c), maka
\[\int_{-b}^{\eta} \left( \frac{\partial E_{kx}}{\partial t} + \frac{\partial E_{ky}}{\partial t} + \frac{\partial E_{kx}}{\partial t} + \frac{\partial u E_{kx}}{\partial x} + \frac{\partial v E_{ky}}{\partial y} + \frac{\partial w E_{kz}}{\partial z} \right) dz = 0\]
menjadi
\[(\eta + h) \frac{\partial \overline{E}_{kx}}{\partial t} + \overline{E}_{kx} \frac{\partial \eta}{\partial t} + (\eta + h) \frac{\partial \overline{E}_{ky}}{\partial t} + \overline{E}_{ky} \frac{\partial \eta}{\partial t}\] \[\frac{\eta + h}{2} \left( \frac{\partial E_{kz}^{\eta}}{\partial t} + \frac{\partial E_{kz}^{-h}}{\partial t} \right) + \frac{1}{2} \left( E_{kz}^{\eta} + E_{kz}^{-h} \right) \frac{\partial \eta}{\partial t} - \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3}\] \[+ \beta \frac{\partial}{\partial x} \left( \eta + h \right) \overline{u} \overline{E}_{kx} + \beta \frac{\partial}{\partial y} \left( \eta + h \right) \overline{v} \overline{E}_{ky} - u_{-h} E_{kx}^{-h} \frac{\partial h}{\partial x}\] \[- v_{-h} E_{kz}^{-h} \frac{\partial h}{\partial y} + \frac{1}{2g} \left( \frac{\partial \eta}{\partial t} \right)^{3} - \frac{1}{2g} w_{-h}^{3} = 0\]
Didefinisikan kedalaman total \(H=\eta+h\) dan persamaan dibagi dengan H, serta \(\bar{u}\), \(\bar{v}\), \(\bar{E}_{kx}\) dan \(\bar{E}_{f}\), ditulis sebagai u, v, \(E_{kx}\) dan \(E_{ky}\), persamaan menjadi
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Penelitian menunjukkan bahwa persamaan akan menjadi lebih baik bila semua suku dibagi dengan \(\beta\) dan diambil harga \(\beta = 1/3\).
\[\frac{3}{H} \left( E_{kx} + E_{ky} + \frac{1}{2} E_{kz}^{3} + \frac{1}{2} E_{kz}^{-h} \right) \frac{\partial \eta}{\partial t} + 3 \frac{\partial E_{kx}}{\partial t} + 3 \frac{\partial E_{ky}}{\partial t} + \left( \frac{3}{2} \frac{\partial E_{kz}^{\eta}}{\partial t} + \frac{3}{2} \frac{\partial E_{kz}^{-h}}{\partial t} + \frac{1}{H} \frac{\partial u H E_{kx}}{\partial x} + \frac{1}{H} \frac{\partial v H E_{ky}}{\partial y} \right) \frac{1}{H} \left( 3 u_{-h} E_{kx}^{-h} \frac{\partial h}{\partial x} + 3 v_{-h} E_{ky}^{-h} \frac{\partial h}{\partial y} \frac{1}{2g} w_{-h}^{3} \right) = 0\]
Persamaan (8) adalah persamaan kekekalan energi yang terintegrasi terhadap kedalaman.
dengan \[w_{\eta} = \frac{\partial \eta}{\partial t}\] maka
\[\frac{\partial E_{kz}^{\eta}}{\partial t} = \frac{1}{2g} \frac{\partial}{\partial t} w_{\eta}^{2} = \frac{1}{g} w_{\eta} \frac{\partial w_{\eta}}{\partial t} = \frac{1}{g} \frac{\partial \eta}{\partial t} \frac{\partial^{2} \eta}{\partial t^{2}}\]
Syarat batas kinematik dasar perairan
\[W_{-h} = -\left(u_{-h} \frac{\partial h}{\partial x} + v_{-h} \frac{\partial h}{\partial y}\right)\]
Pada perairan dangkal, dapat dilakukan pendekatan \(u_{-h}\) = u dan \(v_{-h}\) = v. Pada perairan yang datar atau landai dimana
\[\frac{\partial h}{\partial x}\], \(\frac{\partial h}{\partial y} \approx 0\)
maka \(w_{-h} \approx 0\), sehingga suku yang mengandung \(w_{-h}\) ataupun
\[\frac{\partial h}{\partial x}\] atau \(\frac{\partial h}{\partial y}\) dapat diabaikan.
3. Penggunaan Persamaan Kekekalan Energi
Dengan anggapan \(E_{kz}^{\eta}\) dan \(E_{kz}^{-\eta}\), \(u_{-h}\), \(v_{-h}\) serta \(w_{-h}\), adalah bilangan yang sangat kecil, maka Persamaan (8) menjadi
\[\frac{3}{H} \left( E_{kx} + E_{ky} \right) \frac{\partial \eta}{\partial t} + 3 \frac{\partial E_{kx}}{\partial t} + 3 \frac{\partial E_{ky}}{\partial t} + \frac{1}{H} \frac{\partial uHE_{kx}}{\partial x} + \frac{1}{H} \frac{\partial vHE_{ky}}{\partial y} = 0\]
Dengan mengerjakan diferensial parsial pada
\[\frac{\partial uHE_{kx}}{\partial x} \operatorname{dan} \frac{\partial vHE_{ky}}{\partial y}, \text{ maka}\] \[\frac{3}{H} \left( E_{kx} + E_{ky} \right) \frac{\partial \eta}{\partial t} + 3 \frac{\partial E_{kx}}{\partial t} + 3 \frac{\partial E_{ky}}{\partial t} + \cdots\] \[\frac{E_{kx}}{H} \frac{\partial uH}{\partial x} + \frac{E_{ky}}{H} \frac{\partial vH}{\partial y}\] \[+ u \frac{\partial E_{kx}}{\partial x} + v \frac{\partial E_{ky}}{\partial y} = 0\] (9)
Persamaan (9) akan digunakan untuk analisis hidrodinamika gelombang pendek, dengan mensuperposisikan dengan persamaan gelombang panjang dari Airy.
Persamaan gelombang panjang dari Airy adalah (Dean, Robert G., and Dalrymple),
\[\frac{\partial \eta}{\partial t} + \frac{\partial (uH)}{\partial x} + \frac{\partial (vH)}{\partial y} = 0\] (10a)
\[\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + g \frac{\partial \eta}{\partial x} = 0\] (10b)
\[\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial v} + g \frac{\partial \eta}{\partial v} = 0\] (10c)
Keterbatasan persamaan ini adalah bahwa untuk gelombang pendek persamaan hanya dapat digunakan pada amplitudo gelombang yang sangat kecil, A < 0.1 m (Syawaluddin, H., dkk., 2005).
Persamaan kontinuitas, Persamaan (10a), diturunkan berdasarkan hukum kekekalan masa saja. Sementara itu fluktuasi muka air η adalah merupakan perubahan energi potensial. Oleh karena itu pada saat muka air naik (\(\partial \eta / \partial \tau > 0\)) diperlukan suplai energi, sedangkan pada saat air turun terjadi pelepasan energi. Pada Persamaan (10a), tidak terlihat adanya suplai energi maupun tempat pelepasan energi. \(\partial uH/\partial x\) dan \(\partial uH/\partial v\) hanvalah sumber masa air saia. Oleh karena itu dengan mensuperposisikan Persamaan (9) dengan Persamaan (10a), akan diperoleh persamaan yang dapat mensuplai masa dan energi. Persamaan (9) dijumlahkan dengan Persamaan (10a) diperoleh
\[\left(1 + \frac{3E_{kx} + 3E_{ky}}{H}\right) \frac{\partial \eta}{\partial t} + \left(1 + \frac{E_{kx}}{H}\right) \frac{\partial uH}{\partial x} + \left(1 + \frac{E_{ky}}{H}\right) \frac{\partial vH}{\partial y} + \frac{\partial E_{kx}}{\partial t} + \frac{\partial E_{ky}}{\partial t} + \frac{\partial E_{kx}}{\partial x} + \frac{\partial E_{ky}}{\partial y} = 0\] \[+ u \frac{\partial E_{kx}}{\partial x} + v \frac{\partial E_{ky}}{\partial y} = 0\] (11)
Dengan menggunakan persamaan kontinuitas yang baru Persamaan (11), sedangkan persamaan momentum tetap seperti Persamaan (10b) dan (10c) dikembangkan model numeris.
4. Metoda Numeris
Metoda numeris yang digunakan untuk diskritisasi ruang adalah metoda selisih hingga berbasis pada polinomial Lagrange (Svawaluddin, H., 2006), Sedangkan diferensial waktu diselesaikan dengan metoda integrasi atau dapat disebut juga dengan metoda prediktor-korektor (Syawaluddin, H., dkk., 2005).
Persamaan kontinuitas, Persamaan (11) dapat ditulis dalam bentuk
\[\frac{\partial \eta}{\partial t} = P(t) \frac{3}{k} \frac{\partial E_{kx}}{\partial t} - \frac{3}{k} \frac{\partial E_{ky}}{\partial t}\](12a) \[P(t) = -\frac{1}{c} \left( \left( 1 + \frac{E_{kx}}{H} \right) \frac{\partial uH}{\partial x} + \left( 1 + \frac{E_{ky}}{H} \frac{\partial vH}{\partial y} \right) + \frac{\partial E_{kx}}{\partial x} + v \frac{\partial E_{ky}}{\partial y} \right)\] \[k = I + \left( \frac{3E_{kx}}{H} + \frac{3E_{ky}}{H} \right)\] \[\frac{\partial u}{\partial t} = Q(t)\] (12b)
\[\frac{\partial v}{\partial t} = R(t) \tag{12c}\]
\[Q(t) = -\left(u\frac{\partial u}{\partial x} + v\frac{\partial u}{\partial y} + g\frac{\partial \eta}{\partial x}\right)\]
\[R(t) = -\left(u\frac{\partial v}{\partial x} + v\frac{\partial v}{\partial y} + g\frac{\partial \eta}{\partial y}\right)\]
Selanjutnya Persamaan (12a), (12b) dan (12c) diintegrasikan terhadap waktu, diperoleh
\[\eta^{t2} = \eta^{tI} + \int_{tI}^{t2} P(t) dt - \frac{3}{k} \left( E_{kx}^{t2} - E_{kx}^{tI} \right) - \frac{3}{k} \left( E_{ky}^{t2} - E_{ky}^{tI} \right)\] \[u^{t2} = u^{tI} + \int_{tI}^{t2} Q(t) dt\] \[v^{t2} = v^{tI} + \int_{tI}^{t2} R(t) dt\] \[\int_{tI}^{t2} P(t) dt + \int_{tI}^{t2} Q(t) dt + \int_{tI}^{t2} R(t) dt\]
dapat diselesaikan secara numerik dengan mendekati P (t), Q (t) dan R (t) dengan polinomial Lagrange [Syawaluddin, H., dkk., 2005]. Untuk integrasi dari t<sub>1</sub> = \(t - \delta t\) sampai \(t_2 = t + \delta t\), dimana terdapat 3 titik integrasi yaitu \(t - \delta t\), \(t dan t + \delta t\), maka
\[\int_{t-\delta t}^{t+\delta t} P(t) dt = \delta t \left( c_1 P^{t-\delta t} + c_2 P^t + c_3 P^{t+\delta t} \right)\]
dimana \(c_1 = 1/3\), \(c_2 = 4/3\) dan \(c_3 = 1/3\). Begitu juga
\[\int_{t+\delta t}^{t+\delta t} Q(t) dt \quad \text{dan} \quad \int_{t-\delta t}^{t+\delta t} R(t) dt\]
Pada saat t=t, dimana \(\eta^{t+\delta t}\), \(u^{t+\delta t}\) dan \(v^{t+\delta t}\) tidak diketahui, maka \(P^{t+\delta t}\), \(Q^{t+\delta t}\) dan \(R^{t+\delta t}\) juga belum diketahui. Oleh karena itu pada tahap awal dilakukan
\[P^{t+\delta t} = P^t + \frac{\partial P}{\partial t} \delta t\]
\[Q^{t+\delta t} = Q^t + \frac{\partial Q}{\partial t} \delta t\]
\[R^{t+\delta t} = R^t + \frac{\partial R}{\partial t} \delta t\]
Dengan harga-harga hasil prediksi tersebut dapat dihitung harga \(\eta^{t+\delta t}\), \(u^{t+\delta t}\) dan \(v^{t+\delta t}\) prediksi. Karena itu tahap ini dapat disebut dengan tahap prediksi.
Dengan harga \((\eta, u, v)^{t+\delta t}\) yang baru tersebut dihitung lagi harga (P, Q, R) t+ 8t yang baru dan dengan menyelesaikan integrasi diperoleh \((\eta, u, v)^{t+\delta t}\) yang lebih baru lagi dan dilakukan pemeriksaan konvergensi yaitu
\[\left| \boldsymbol{\eta}_{old}^{t+\delta t} - \boldsymbol{\eta}_{new}^{t+\delta t} \right| = \epsilon\] begitu juga pada u dan v.
Dalam hal syarat konvergensi terpenuhi
\[\eta_{new}^{t+\delta t}\], \(u_{new}^{t+\delta t}\) dan \(v_{new}^{t+\delta t}\)
adalah hasil yang dicari, bila belum konvergen, maka dengan harga (η, u, v) t+ δt yang baru dilakukan perhitungan (η, u, v) t+ δt yang lebih baru lagi, karena itu tahap ini disebut dengan tahap korektor.
5. Hasil Model
5.1 Panjang gelombang
Pada Gambar (4.1) disajikan perbandingan antara panjang gelombang dari teori gelombang linier, panjang gelombang model dan panjang gelombang dari persamaan gelombang Airy. Hal ini dikarenakan penggunaan tekanan hidrodinamis gelombang panjang
\[\left(g\frac{\partial \eta}{\partial x} \text{ dan } g\frac{\partial \eta}{\partial y}\right)\] yang dianggap merata pada seluruh kedalaman. Apabila tekanan tersebut dikalikan dengan suatu bilangan yang lebih kecil dari satu, maka akan diperoleh panjang gelombang yang lebih pendek, semakin kecil bilangan pengali tersebut, maka akan semakin kecil panjang gelombangnya. (Syawaluddin, H., 2006).
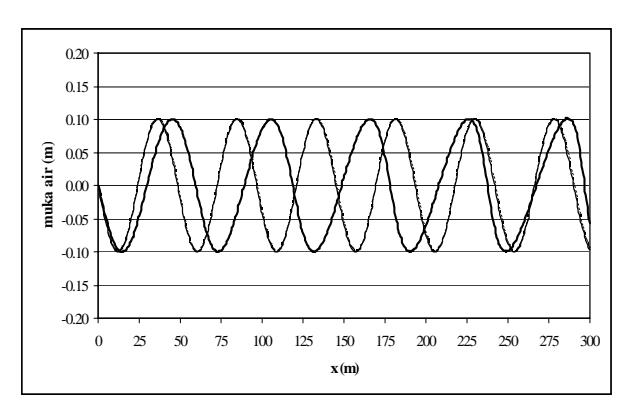
Gambar 4.1. Perbandingan panjang gelombang
5.2 Tinggi gelombang
Salah satu tujuan dari pengembangan model adalah agar diperoleh persamaan yang dapat mensimulasikan gelombang pendek dengan tinggi gelombang yang besar. Tinggi gelombang terbesar untuk suatu periode gelombang pada perairan dalam diberikan oleh persamaan Pierson-Moskowitz (Sarpkava T. and Iseacson, Micheal, 1981), vaitu \(T^2 / 2A = 19.66\), dimana 2A = tinggi gelombang. Jadi untuk periode gelombang 6 detik, tinggi gelombang terbesarnya \((2A)_{max} = 0.81\) m. Pada Gambar (4.2) ditunjukkan bahwa model dapat mensimulasikan gelombang tersebut dengan baik.
5.3 Shoaling
Pengujian shoaling dilakukan pada perairan dengan kemiringan dasar perairan 0.02, dengan kedalaman mula-mula 10 m. Gelombang yang digunakan adalah gelombang dengan perioda 6 detik, dengan tinggi gelombang mula-mula 0.2 m. Pada Gambar (4.3) disajikan perbandingan antara hasil model dengan hasil shoaling dari teori gelombang linier, terlihat bahwa hasil model lebih tinggi dari hasil teori gelombang linier.
Hal ini dikarenakan penggunaan tekanan gelombang
\[\left(g\frac{\partial \eta}{\partial x} \operatorname{dan} g \frac{\partial \eta}{\partial y}\right)\] yang bekerja sama besar pada seluruh kedalaman, sehingga energi gelombang pada persamaan yang digunakan menjadi terlalu besar. Oleh karena itu ketika gelombang (dari model) memasuki perairan yang lebih dangkal terjadi pemampatan energi yang besar baik akibat berkurangnya kedalaman maupun akibat pemendekan gelombang sehingga dihasilkan pembesaran tinggi gelombang yang lebih besar dari yang seharusnya.
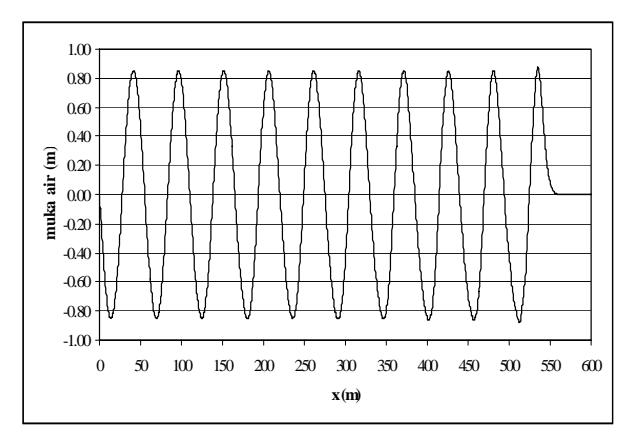
Gambar 4.2. Performance model pada tinggi gelombang 0.85 m, periode 6 detik, kedalaman perairan 30 m
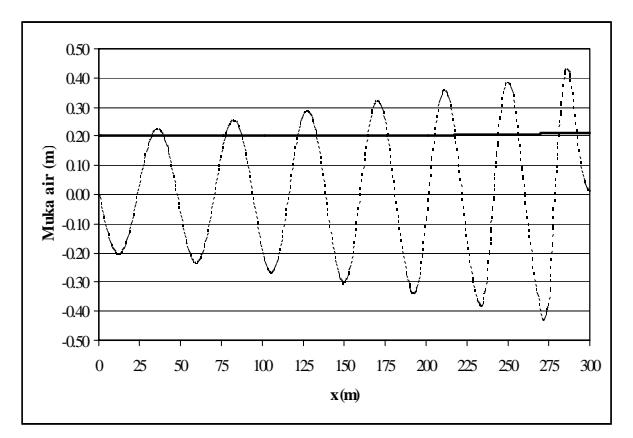
Gambar 4.3. Perbandingan shoaling antara teori gelombang linier dan model
Tekanan pada persamaan momentum diperoleh dengan mengintegrasikan persamaan Euler arah z
\[\frac{1}{\rho} p = \int_{-h}^{\eta} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz + \int_{-h}^{\eta} \partial w w + \int_{-h}^{\eta} g dz\]
Analisis numerik penyelesaian persamaan Euler (Syawaluddin, H., 2006), memberikan hasil bahwa distribusi kecepatan horizontal terhadap kedalaman adalah seragam. Hal ini dikarenakan tekanan
hidrodinamis yang disebabkan oleh \(\eta\) hasil \(\int g dz\)
bekerja sama besar pada seluruh kedalaman.
Tekanan hidrodinamis dari teori gelombang linier (Dean, Robert G., and Dalrymple) adalah \(p_{hyd} = g\eta\)\(\cosh k (h + z) / \cosh kh\). Terlihat bahwa tekanan hidrodinamik \(g\eta\) adalah berubah terhadap kedalaman. Oleh karena itu pada model yang dikembangkan hanya menggunakan tekanan hidrodinamik gn yang dianggap bekerja pada seluruh kedalaman. Karena itu
panjang gelombang dari model menjadi terlalu panjang dan shoaling yang dihasilkan menjadi terlalu besar karena kelebihan energi.
5.4 Refraksi-difraksi
mengamati kemampuan model mensimulasikan fenomena refraksi-difraksi, model dikerjakan pada suatu kawasan perairan dengan batimetri berpola seperti tanjung (Gambar 4.4). Gelombang yang digunakan adalah gelombang dengan perioda 6 detik dengan tinggi gelombang mula-mula 1.2 m.
Telah diketahui bahwa pada batimetri seperti ini gelombang akan terefraksi ke arah pusat tanjung, sehingga akibat refraksi yang konvergen ini disertai dengan shoaling, pada pusat tanjung akan terjadi pembesaran gelombang. Kondisi gelombang pada detik ke 24, terlihat bahwa tinggi gelombang pada pusat tanjung jauh lebih besar dari yang lainnya. Pada Gambar (4.6) diperlihatkan kontur tinggi gelombang terbesar pada daerah yang telah dilewati gelombang. Gambar-gambar tersebut menunjukkan terjadinya refraksi konvergen atau pemusatan energi gelombang pada pusat tanjung.
6. Kesimpulan dan Saran
Berdasarkan hasil model numeris yang dikembangkan, maka dapat disimpulkan bahwa pada pengembangan persamaan hidrodinamika sebaiknya dikerjakan juga persamaan kekekalan energi. Hal ini terbukti bahwa pengerjaan hukum kekekalan energi pada persamaan gelombang panjang dari Airy menjadikan persamaan dapat memodelkan gelombang pendek dengan baik. Contoh lain dari penggunaan hukum kekekalan energi pada pengembangan model hidrodinamika adalah teori gelombang linier, dimana pada formulasinya dikerjakan persamaan kekekalan energi dari Bernoulli (Dean, Robert G., and Dalrymple).
Panjang gelombang yang dihasilkan oleh gelombang lebih panjang dari panjang gelombang dari teori gelombang linier, terlebih lagi terhadap panjang gelombang teori gelombang Stoke. Shoaling yang dihasilkan lebih besar dari pada shoaling dari teori gelombang linier. Kedua hal tersebut dikarenakan penggunaan tekanan gelombang panjang yang bekerja pada seluruh kedelaman. Oleh karena itu untuk mengembangkan model yang lebih baik lagi perlu digunakan tekanan hidrodinamis yang lebih tepat, dimana yang berpotensi digunakan adalah tekanan vang dirumuskan dari persamaan Euler secara lengkap atau dari persamaan Bernoulli.
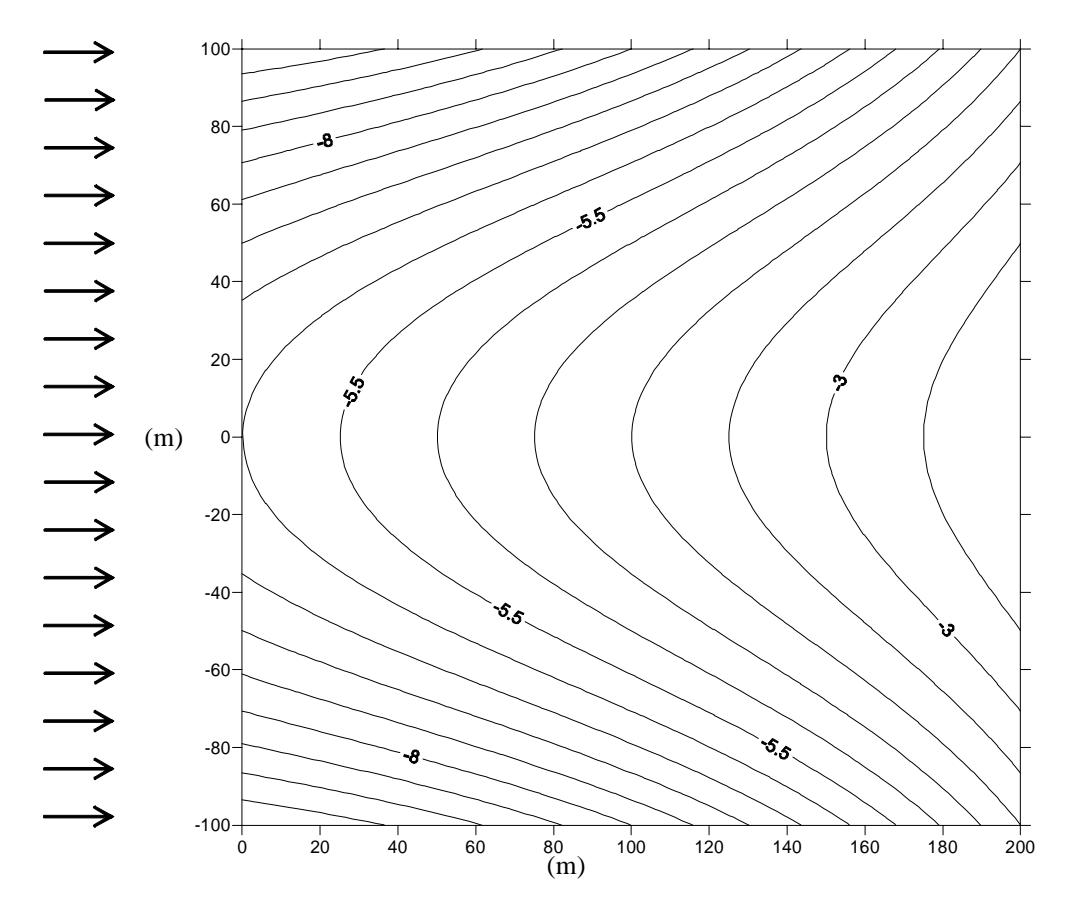
Gambar 4.4. Batimetri tanjung
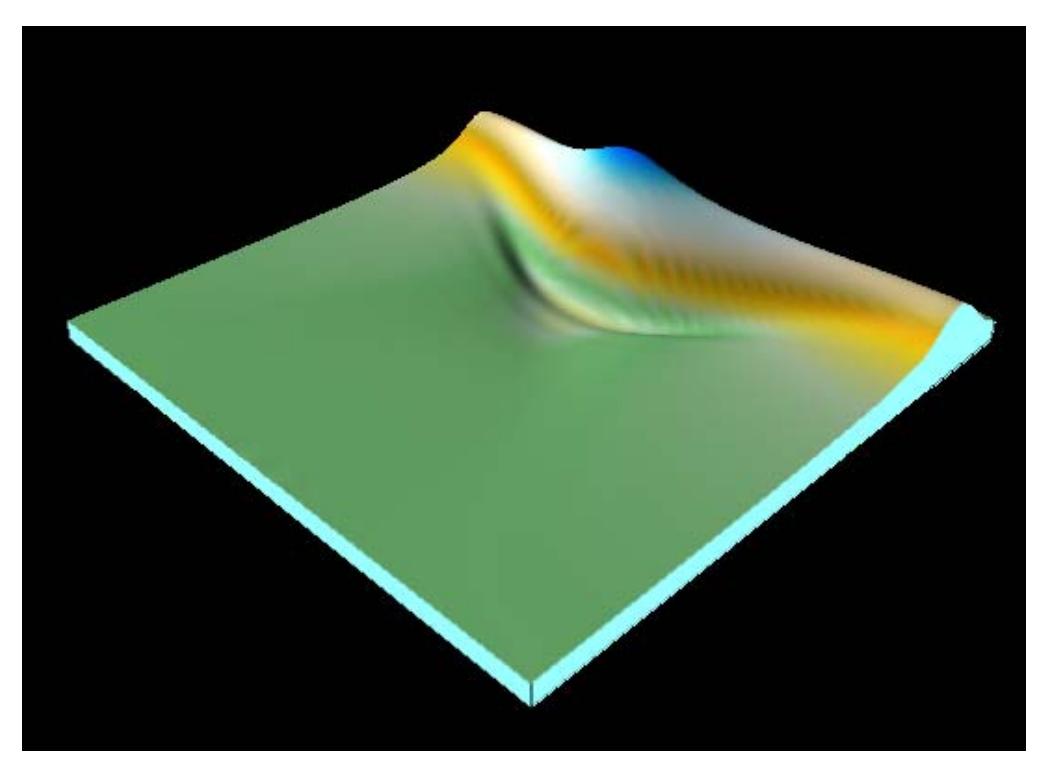
Gambar 4.5. Kondisi gelombang pada detik ke 24
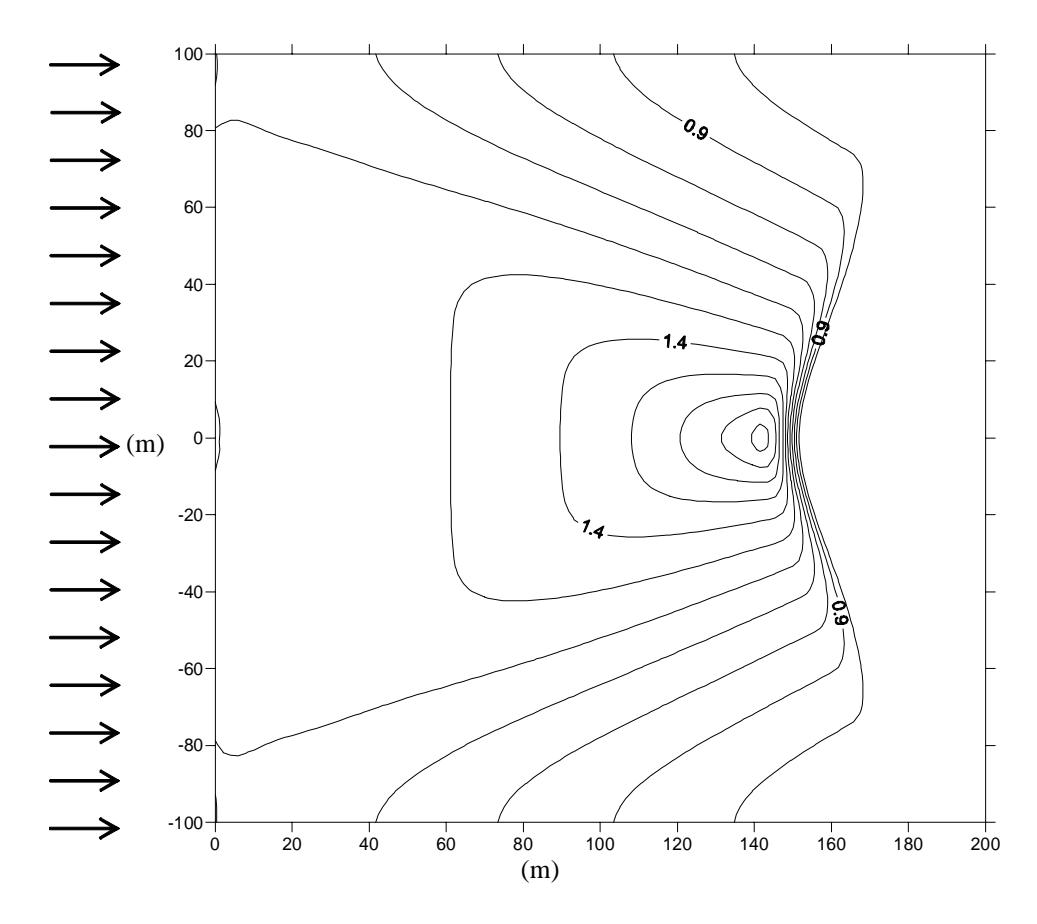
Gambar 4.6. Kontur tinggi gelombang terbesar setelah detik ke 24