
1. Pendahuluan
Penyelesaian persamaan vibrasi dengan metoda integrasi telah lama dikenal, yaitu antara lain metoda Wilson-q dan Newmark-b, (Bathe, 1982). Penyelesaian diferensial waktu orde satu dengan metoda integrasi juga telah banyak digunakan, yaitu dikerjakan pada penyelesaian persamaan gelombang nonlinier dari Boussinesq, Liu (1999), (Meftah, 2004). (Hutahaean, 2005, 2007a, 2007b, 2008) menyelesaikan persamaan gelombang panjang Airy dengan metoda integrasi dengan menggunakan integrasi numeris dari Newton-Cote.
Pada penelitian ini dikerjakan integrasi numeris dari Newton-Cote pada persamaan vibrasi vang merupakan diferensial waktu orde 2.
2. Polinomial Lagrange
Pendekatan fungsi f(x) dengan polinomial Lagrange adalah, Arden (1970),
\[f(x) = \sum_{i=1}^{n} L_i(x) f_i\] (1)
dimana
polinomial Lagrange pada titik i \(L_i(x) =\)harga fungsi pada titik i
= jumlah titik polinomial
Bentuk umum polinomial Lagrange adalah, Arden (1970),
\[L_{i}(x) = \frac{(x-x_{1})(x-x_{2})(x-x_{3})....(x-x_{n})}{(x_{i}-x_{1})(x_{i}-x_{2})(x_{i}-x_{3})....(x_{i}-x_{n})}\]
\[L_i(x) = \prod_{j=1}^n \frac{\left(x - x_j\right)}{\left(x_i - x_j\right)}, \ j \neq i\]
Apabila pada suatu domain \(0 \le x \le L\) didekati dengan 3 titik polinomial Gambar 1, maka bentuk pendekatannya adalah
Gambar 1. Pendekatan dengan 3 titik polinomial
\[f(x) = L_1(x) f_1 + L_2(x) f_2 + L_3(x) f_3\]
dimana:
\[L_{1}(x) = \frac{(x - x_{2})(x - x_{3})}{(x_{1} - x_{2})(x_{1} - x_{3})}\]
\[L_2(x) = \frac{(x - x_1)(x - x_3)}{(x_2 - x_1)(x_2 - x_3)}\]
\[L_3(x) = \frac{(x - x_1)(x - x_2)}{(x_3 - x_1)(x_3 - x_2)}\] pada \[x = x_1\], \(L_1(x_1) = 1\), \(L_2(x_1) = 0\), \(L_3(x_1) = 0\), maka \[f(x_1) = L_1(x_1) f_1 + L_2(x_1) f_2 + L_3(x_1) f_3 = f_1\] pada \[x = x_2\], \(L_1(x_2) = 1\), \(L_2(x_2) = 0\), \(L_3(x_2) = 0\), maka \[f(x_2) = L_1(x_2) f_1 + L_2(x_2) f_2 + L_3(x_2) f_3 = f_2\] pada \(x = x_3\), \(L_1(x_3) = 1\), \(L_2(x_3) = 0\), \(L_3(x_3) = 0\), maka \[f(x_3) = L_1(x_3) f_1 + L_2(x_3) f_2 + L_3(x_3) f_3 = f_3\]
Jadi pendekatan fungsi dengan polinomial Lagrange adalah exact pada titik-titik polinomial dimana
\[f(x_1) = f_1\], \(f(x_2) = f_2\), \(f(x_3) = f_3\)
Pendekatan fungsi f(x) dengan polinomial Lagrange dapat saja dilakukan pendekatan langsung yaitu pada seluruh domain langsung digunakan n titik polinomial. Tetapi pendekatan seperti ini akan terbentuk polinomial dengan pangkat tinggi pada x yaitu \(x^{n-1}\), dimana semakin besar n, akan semakin besar derajat polinomialnya dan sering terjadi malah mengurangi ketelitian.
Metoda pendekatan yang termudah adalah dengan membagi-bagi daerah perhitungan dalam sejumlah sub -domain, selanjutnya pendekatan polinomial dilakukan pada masing-masing sub-domain.
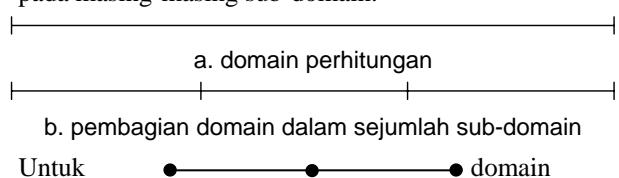
c. pendekatan dilakukan pada sub-domain dengan sejumlah titikpolinomial
Gambar 2. Pendekatan polinomial dengan subdomain
yang dibagi dalam 3 sub domain dan pada sub domain digunakan 3 titik polinomial,

Pada sub-domain (1)
\[f(x) = L_{1}(x) f_{1} + L_{2}(x) f_{2} + L_{3}(x) f_{3}\] \[L_{1}(x) = \frac{(x - x_{2})(x - x_{3})}{(x_{1} - x_{2})(x_{1} - x_{3})}\] \[L_{2}(x) = \frac{(x - x_{1})(x - x_{3})}{(x_{2} - x_{1})(x_{2} - x_{3})}\] \[L_{3}(x) = \frac{(x - x_{1})(x - x_{2})}{(x_{3} - x_{1})(x_{3} - x_{2})}\]
Pada sub-domain (2)
\[f(x) = L_{I}(x) f_{3} + L_{2}(x) f_{4} + L_{3}(x) f_{5}\] \[L_{I}(x) = \frac{(x - x_{4})(x - x_{5})}{(x_{3} - x_{4})(x_{3} - x_{5})}\]
\[L_{2}(x) = \frac{(x - x_{3})(x - x_{5})}{(x_{4} - x_{3})(x_{4} - x_{5})}\]\[L_{3}(x) = \frac{(x - x_{3})(x - x_{4})}{(x_{5} - x_{3})(x_{5} - x_{4})}\]
Pada sub-domain (3)
\[f(x) = L_1(x)f_5 + L_2(x)f_6 + L_3(x)f_7\] \[L_1(x) = \frac{(x - x_6)(x - x_7)}{(x_5 - x_6)(x_5 - x_7)}\] \[L_2(x) = \frac{(x - x_5)(x - x_7)}{(x_6 - x_5)(x_6 - x_7)}\]
\[L_3(x) = \frac{(x - x_5)(x - x_6)}{(x_7 - x_5)(x_7 - x_6)}\]
Untuk selanjutnya, yang dimaksudkan pendekatan polinomial Lagrange adalah pendekatan pada sub-domain.
3. Integrasi Numeris dengan Metoda Newton-Cote
Dengan menggunakan polinomial Lagrange dapat dengan mudah dilakukan integrasi suatu fungsi, yaitu
\[f(x) = \sum_{i=1}^{n} L_{i}(x) f_{i}\] \[\int_{a}^{b} f(x) dx = \sum_{i=1}^{n} \int_{a} L_{i}(x) f_{i} dx\] (2)
Untuk pendekatan 3 titik polinomial
\[\int_{a}^{b} f(x)dx = \int_{a}^{b} L_{1}(x)dx f_{1} + \int_{a}^{b} L_{2}(x)dx f_{2} + \int_{a}^{b} L_{3}(x)dx f_{3}\] (3)
mengingat \(L_i\) (x) adalah suatu polinomial, maka integrasi dapat dengan mudah dilakukan.
3.1 Koefisien integrasi
Pada Persamaan (3) terlihat bahwa dengan interval integrasi yang konstan, maka didapat hasil integrasi \(L_i\)(x) yang konstan juga. Jadi untuk harga a dan b yang tetap, maka bila
\[\int_{a}^{b} L_{1}(x)dx = c_{1}, \quad \int_{a}^{b} L_{2}(x) dx = c_{2} dan \int_{a}^{b} L_{3}(x)dx = c_{3}\]
maka
\[\int_{a}^{b} L_{I}(x) dx = c_{1} f_{1} + c_{2} f_{2} + c_{3} f_{3}\]
c<sub>1</sub>, c<sub>2</sub> dan c<sub>3</sub> disebut dengan koefisien integrasi.
Telah diketahui bahwa suatu fungsi f(x) pada domain \(a \le x \le b\) untuk setiap harga a dan b, dapat ditransformasikan menjadi suatu fungsi \(g(\xi)\) pada domain \(-1 \le \xi \le 1\). Jadi bila didapatkan harga-harga koefisien integrasi pada domain \(\xi\), maka integrasi akan dapat dilakukan dengan menggunakan koefisien integrasi tersebut tanpa harus melakukan integrasi polinomial Lagrange lagi, dimana metoda integrasi ini disebut dengan.metoda Newton-Cote.
Untuk x yang konstan, fungsi transformasi dari x ke \(\xi\) dapat digunakan persamaan transformasi yang sederhana, vaitu
\[x = p + q\]
Pada = -1, \(x = a\); dan pada = 1, \(x = b\), sehingga diperoleh dua persamaan yaitu \(a = -p + q\)
\[b = p + q\]
Dari ke 2 persamaan tersebut diperoleh \(q = \frac{a+b}{2}\)
\(dan p = \frac{b-a}{2}\) sehingga persamaan transformasi menjadi
\[x = \frac{b-a}{2} + \frac{a+b}{2}\]
\[\frac{dx}{d\xi} = \frac{b-a}{2}\]
\[dx = \frac{b-a}{2} d\]
Dengan persamaan transformasi tersebut, maka
\[\int_{a}^{b} f(x) \, dx = \int_{-1}^{1} g(\xi) \frac{b - a}{2} \, d\xi\] dengan \[g(\xi) = \sum_{i=1}^{n} L_i(\xi) g_i\], dimana \(g_i = f_i\)
Integrasi menjadi, \[\int_{a}^{b} f(x) dx =\]
\[\frac{b-a}{2} \int_{-1}^{1} \sum_{i=1}^{n} L_{i}(\xi) g_{i} d\xi = \frac{b-a}{2} \sum_{i=1}^{n} \left( \int_{-1}^{1} L_{i}(\xi) f_{i} d\xi \right)\]
\[\int_{a}^{b} f(x) \, dx =\]
\[\frac{b-a}{2} \left( \left( \int_{-1}^{1} L_1(\xi) d\xi \right) f_1 + \left( \int_{-1}^{1} L_2(\xi) d\xi \right) f_2 - \dots + \left( \int_{-1}^{1} L_n(\xi) d\xi \right) f_n \right)\]
\[\int_{a}^{b} f(x) dx = \frac{b - a}{2} (c_1 f_1 + c_2 f_2 + \dots + c_n f_n) = \frac{b - a}{2} \sum_{i=1}^{n} c_i f_i\] (4)
dimana \[c_i = \int_{-1}^{1} L_i(\xi) d\xi\] yang berharga konstan mengingat integrasi selalu dilakukan pada domain \(-1 \le \xi \le 1\). Jadi bila diperoleh harga-harga \(c_i\), integrasi akan dapat dilakukan setiap saat dengan menggunakan Persamaan (4) tanpa harus mengintegrasikan polynomial Lagrange lagi.
Pada bagian berikut akan dihitung koefisien integrasi untuk sejumlah konfigurasi titik integrasi dengan mengintegrasikan polynomial Lagrange.
Integrasi dengan 3 titik polinomial
Pada skema ini interval garis a-b dibagi dalam 2 interval, yaitu seperti terlihat pada Gambar (3). Untuk pendekatan dengan 3 titik polinomial, maka
\[\int_{a}^{b} f(x) dx = \frac{b - a}{2} \left( \int_{-1}^{1} L_{1}(\xi) d\xi f_{1} + \int_{-1}^{1} L_{2}(\xi) d\xi f_{2} + \int_{-1}^{1} L_{3}(\xi) d\xi f_{3} \right)\]
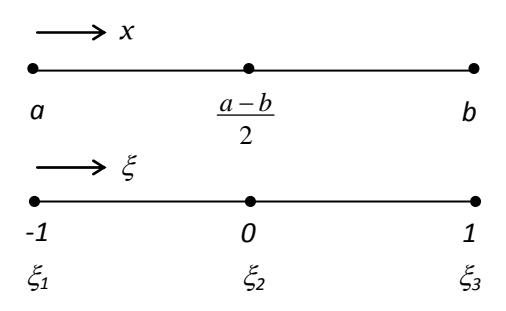
Gambar 3. Integrasi dengan 3 titik polinomial
Dengan 3 titik polinomial atau titik integrasi tersebut dimana \(\xi_1 = -1\), \(\xi_2 = 0\), \(\xi_3 = 1\), polinomial Lagrange
\[L_{1}(\xi) = \frac{(\xi - \xi_{2})(\xi - \xi_{3})}{(\xi_{1} - \xi_{2})(\xi_{1} - \xi_{3})} = -\frac{1}{2}\xi(\xi - 1)\] \[L_{2}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{3})}{(\xi_{2} - \xi_{1})(\xi_{2} - \xi_{3})} = (1 - \xi^{2})\] \[L_{3}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{2})}{(\xi_{3} - \xi_{1})(\xi_{3} - \xi_{2})} = \frac{1}{2}\xi(\xi + 1)\]
Dengan demikian diperoleh koefisien integrasi yaitu
\[c_{1} = \int_{-1}^{1} L_{1}(\xi) d\xi = \int_{-1}^{1} -\frac{1}{2} \xi(\xi - 1) d\xi = \frac{1}{3}\] \[c_{2} = \int_{-1}^{1} L_{2}(\xi) d\xi = \int_{-1}^{1} (1 - \xi^{2}) d\xi = \frac{4}{3}\] \[c_{3} = \int_{-1}^{1} L_{3}(\xi) d\xi = \int_{-1}^{1} \frac{1}{2} \xi(\xi + 1) d\xi = \frac{1}{3}\]
Integrasi dengan 4 titik polinomial
Pada skema ini interval garis a - b dibagi dalam 3 interval, yaitu
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Gambar 4. Integrasi dengan 4 titik polinomial
Dengan 4 titik polinomial ini, maka polinomial Lagrange berbentuk
\[L_{1}(\xi) = \frac{(\xi - \xi_{2})(\xi - \xi_{3})(\xi - \xi_{4})}{(\xi_{1} - \xi_{2})(\xi_{1} - \xi_{3})(\xi_{1} - \xi_{4})}\] \[L_{2}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{3})(\xi - \xi_{4})}{(\xi_{2} - \xi_{1})(\xi_{2} - \xi_{3})(\xi_{2} - \xi_{4})}\] \[L_{3}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{2})(\xi - \xi_{4})}{(\xi_{3} - \xi_{1})(\xi_{3} - \xi_{2})(\xi_{3} - \xi_{4})}\] \[L_{4}(\xi) = \frac{(\xi - \xi_{1})(\xi - \xi_{2})(\xi - \xi_{3})}{(\xi_{4} - \xi_{1})(\xi_{4} - \xi_{2})(\xi - \xi_{3})}\]
Dengan memasukkan harga-harga ξ<sub>1</sub> s/d ξ<sub>4</sub> seperti pada Gambar (4) dan dengan mengintegrasikan dari -I dan ke I, maka diperoleh
\[c_{1} = \int_{-I}^{I} L_{I}(\xi) d\xi = 0.25 \; ; \; c_{2} = \int_{-I}^{I} L_{2}(\xi) d\xi = 0.75\]\[c_{3} = \int_{-I}^{I} L_{3}(\xi) d\xi = 0.75 \; ; \; c_{4} = \int_{-I}^{I} L_{4}(\xi) d\xi = 0.25\]
Koefisien integrasi, untuk berbagai titik integrasi dengan persamaan integrasi
\[\int_{a}^{b} f(x) dx = \frac{b - a}{2} \sum_{i=1}^{n} c_{i} f_{i}, \text{ adalah seperti pada tabel}\]
berikut.
Tabel 1. Koefisien integrasi ci pada persamaan
\[\int_{a}^{b} f(x) \ dx = \frac{b-a}{2} \sum_{i=1}^{n} C_{i} \ f_{i}\] \[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\]
Contoh: akan dihitung \(\int_{0}^{\pi/2} \sin x dx\)
a. dengan 3 titik integrasi
dalam hal ini \[f(x) = \sin x\], \(a = 0\) dan \(b = \frac{\pi}{2}\)
\[x_1 = 0\] ; \(f_1 = 0\) \[x_2 = \frac{\pi}{4}\] ; \(f_2 = \frac{1}{2}\sqrt{2}\)
\[x_3 = \frac{\pi}{2}\] ; \(f_3 = 1\)
\[\int_{0}^{\pi/2} \sin x dx = \frac{\pi}{2} - 0 \left( \frac{1}{3} x 0 + \frac{4}{3} x \frac{1}{2} \sqrt{2} + \frac{1}{3} x 1 \right) = 1.00228\] Dimana basil eksak
Dimana hasil eksak \(\int_{0}^{\frac{\pi}{2}} \sin x dx = 1\)
b.dengan 4 titik integrasi
\[x_1 = 0\]; \(f_1 = 0\)
\(x_2 = \frac{\pi}{6}\); \(f_2 = 0.5\)
\(x_3 = \frac{\pi}{3}\); \(f_3 = 0.866025\)
\(x_4 = \frac{\pi}{2}\); \(f_4 = 1.0\)
\[\int_{0}^{\pi/2} \sin x dx = \frac{\pi}{2} - 0\] \[(0.25x0 + 0.75x0.5)\]
\[+0.75 \times 0.866025 + 0.25 \times 1 = 1.001005\]
Dari kedua hasil perhitungan tersebut terlihat bahwa semakin banyak titik integrasi, semakin baik ketelitian. Hal ini dikarenakan semakin banyak titik integrasi semakin kecil dx.
4. Penyelesaian Persamaan Vibrasi
Persamaan vibrasi untuk satu derajad kebebasan. Bathe (1982), adalah,
\[m\frac{d^2u}{dt^2} + c\frac{du}{dt} + k u = f(t)\] (5)
= simpangan (Gambar 5)
= koefisien redaman (damping)
= koefisien kekakuan
f(t) = gaya luar yang bekerja pada system
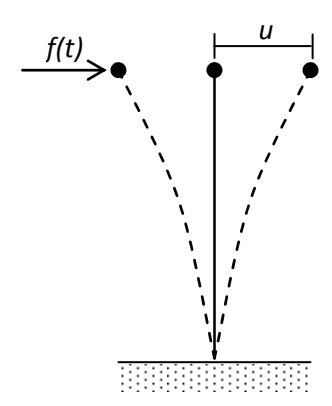
Gambar 5. Sistem SDOF
Persamaan tersebut akan diselesaikan dengan metoda integrasi dari Newton-Cote, dengan 4 titik integrasi. Persamaan (5) dapat ditulis dalam bentuk lain, yaitu
\[m\frac{d}{dt}\left(\frac{du}{dt}\right) + c\frac{du}{dt} + ku = f(t)\]
Persamaan terakhir, dikalikan diintegrasikan dari t-2 t ke t+ t,
Suku ke 1 dan ke 2 ruas kiri persamaan diselesaikan secara analitik, sedangkan suku ke 3 diselesaikan secara numeris.
\[m\int_{t-2\delta t}^{t+\delta t} d\left(\frac{du}{dt}\right) + c\int_{t-2\delta t}^{t+\delta t} du + k\int_{t-2\delta t}^{t+\delta t} u dt = \int_{t-2\delta t}^{t+\delta t} f(t) dt\]
Dalam hal ini \(a = t - 2\delta t\), \(b = t + \delta t\),
\[\frac{b-a}{2} = \frac{(t+\delta t)-(t-2\delta t)}{2} = \frac{3\delta t}{2}\] \[m\left(\left(\frac{du}{dt}\right)^{t+\delta t} - \left(\frac{du}{dt}\right)^{t-2\delta t}\right) + c\left(u^{t+\delta t} - u^{t-2\delta t}\right) + \frac{3\delta t}{2}\] \[k_{ef} = \frac{3m}{2} + \delta t c + \frac{0.75\delta t^{2}k}{2}\] \[f_{ef} = -a_{1}u^{t} - a_{2}u^{t-\delta t} + \delta t m\left(\frac{du}{dt}\right)^{t-2\delta t} + \delta t \int_{t-2\delta t}^{t+\delta t} f(t)dt\] \[\left(0.25u^{t-2\delta t} + 0.75u^{t-\delta t} + 0.75u^{t}\right)\] (8)
\[+0.25 u^{t+\delta t} = k \int_{t+\delta t}^{t+\delta t} f(t) dt\] (6)
\(\left(\frac{du}{dt}\right)^{t+\delta}\) diselesaikan dengan metoda selisih hingga dengan skema diferensial ke belakang,
\[\left(\frac{du}{dt}\right)^{t+\delta t} = \frac{u^{t-\delta t} - 4u^t + 3u^{t+\delta t}}{2\delta t}\]
Substitusi persamaan untuk \(\left(\frac{du}{dt}\right)^{t+\alpha}\)
ke Persamaan (6) dan \[\left(\frac{du}{dt}\right)^{t-2\delta t}\]
dipindahkan ke ruas kanan
\[m\left(\frac{u^{t-\delta t} - 4u^{t} + 3u^{t+\delta t}}{2\delta t}\right) + c\left(u^{t+\delta t} - u^{t-2\delta t}\right) + \frac{3\delta t}{2}k\] \[\left(0.25 u^{t-2\delta t} + 0.75 u^{t-\delta t} + 0.75 u^{t}\right) + \int_{t-2\delta t}^{t+\delta t} f(t) dt\]
Persamaan dikalikan dengan t dan dikelompokkan suku-suku yang mengandung u dengan referens waktu yang sama.
\[\left(\frac{3m}{2} + \delta t c + \frac{0.75\delta^{2}k}{2}\right) u^{t+\delta} + \left(-2m + \frac{2.25\delta^{2}k}{2}\right) u^{t}\] \[+ \left(\frac{m}{2} + \frac{2.25\delta^{2}k}{2}\right) u^{t-\delta}\] \[+ \left(-\delta t c + \frac{0.75\delta^{2}k}{2}\right) u^{t-2\delta} = t m\] \[\left(\frac{du}{dt}\right)^{t-2\delta} + \delta t \int_{t-2\delta}^{t+\delta} f(t) dt\]
Persamaan terakhir dapat ditulis ringkas
\[k_{ef} = \frac{3m}{2} + \delta t c + \frac{0.75 \delta t^{2} k}{2}\] \[f_{ef} = -a_{1}u^{t} - a_{2}u^{t-\delta t} + \delta t m \left(\frac{du}{dt}\right)^{t-2\delta t} + \delta t \int_{t-2\delta t}^{t+\delta t} f(t)dt\] (7)
(8)
\[a_{I} = -2m + \frac{2.25 \delta t^{2} k}{2}\] (9)
\[a_2 = \frac{m}{2} + \frac{2.25 \, \delta t^2 \, k}{2} \tag{10}\]
\[a_3 = \left(-\delta t c + \frac{0.75\delta t^2 k}{2}\right) \tag{11}\]
\[\left(\frac{du}{dt}\right)^{t-2\delta t} = \frac{u^{t-\delta t} - u^{t-3\delta t}}{2 \, \delta t}\]
\[\int_{t-2\,\delta t}^{t+\delta t} f(t)\,dt\]
tergantung dari bentuknya. Dalam hal f(t) merupakan fungsi yang diketahui bentuknya, maka misal f(t) = Asin \(\omega t\), maka dapat diselesaikan secara analitik. Sedangkan bila f(t) berupa data series, maka integrasi dilakukan secara numerik.
Contoh:
Model dieksekusi dengan data:
m = 2.0, c = 11.5, k = 30.0, \[f(t) = 2.0 \sin\left(\frac{2\pi}{2.1}t\right)\]
Perhitungan dilakukan dengan \(\delta t = 0.07\) dt. Hasil eksekusi adalah disajikan pada gambar grafik simpangan u terhadap waktu t, seperti pada Gambar (4.2).
5. Kesimpulan
- 1. Seperti terlihat pada Gambar 6. eksekusi model pada jangka waktu 10x perioda eksitasi solusi model adalah stabil.
- 2. Adapun ketelitian dari metoda ini adalah ditentukan oleh ketelitian dari metoda integrasi dari Newton-Cote, dimana pada contoh integrasi fungsi sinusoidal metoda memberikan hasil yang baik. Hutahaean, (2005, 2007a, 2007b, 2008), menggunakan metoda integrasi dari Newton-Cote pada pemodelan transformasi gelombang, yang juga memberikan hasil yang baik.
- 3. Ketelitian berikutnya adalah ditentukan oleh metoda selisih hingga yang digunakan, dimana pada penelitian ini digunakan ketelitian metoda selisih hingga dengan tingkat ketelitian \(O(d)^2\) baik pada skema central-difference maupun pada backward-difference.
- 4. Secara umum metoda yang dikembangkan cukup mempunyai prospek yang baik, baik untuk diteliti lebih lanjut maupun untuk diaplikasikan pada suatu analisis vibrasi.