
1. Pendahuluan
Telah banyak usaha yang dilakukan untuk mengurangi risiko kerusakan bangunan akibat gempa bumi. Salah satu metode yang sudah dikenal selama ini adalah memasang isolasi antara bangunan atas dan bangunan bawah (pondasi) untuk meredam energi gempa sehingga membatasi beban gempa yang merambat ke bangunan diatasnya. Masalahnya untuk kondisi Indonesia adalah sistem isolasi yang dikenal dewasa ini menggunakan teknologi canggih dan masih sangat terbatas penggunaannya. Sistem isolasi yang ada pada umumnya dipergunakan pada bangunan gedung berlantai banyak. Teknologi tersebut boleh dikatakan praktis belum diterapkan pada bangunan di Indonesia, Di pihak lain jutaan manusia mendambakan untuk mendapatkan perlindungan yang aman terhadap dampak yang ditimbulkan oleh gempa bumi.
Berdasarkan hal tersebut di atas, permasalahan yang masih harus dijawab adalah bagaimana merancang suatu bangunan gedung sehingga benar-benar mampu menahan beban gempa sampai pada taraf yang aman. Penelitian ini mengkaji karakteristik sistem isolasi bola pejal dari baja yang diprediksi dapat diandalkan untuk meredam energi gempa secara signifikan, tetapi dapat diterapkan dengan teknologi yang sederhana pada bangunan rumah.
2. Sistem Kontrol Bangunan Terhadap Gempa
Sistem kontrol respons bangunan terhadap gempa secara garis besar dikenal tiga kategori utama vaitu 1) sistem pengontrolan pasif, 2) sistem pengontrolan semi aktif dan 3) sistem pengontrolan aktif.
Sistem kontrol pasif mereduksi respons bangunan dengan perangkat pasif. Sistem kontrol semi aktif mereduksi respons bangunan dengan cara merubah sifat struktur bangunan seperti redaman (damping) dan kekakuan dengan menggunakan tenaga yang kecil untuk merubah sifat struktur tersebut. Sistem kontrol aktif mereduksi respons bangunan dengan gava pengontrol yang dihasilkan oleh tenaga yang ekivalen dengan gaya untuk menahan gaya inersia bangunan. Sistem isolasi tergolong kedalam sistem kontrol pasif.
Saito, et al. (2005) memaparkan beberapa tipe isolasi seismik (sistem kontrol pasif) yang sudah dikenal dewasa ini yaitu Natural Rubber Bearing, Hight Damping Rubber Bearing, Lead Rubber Bearing, Elastic Sliding Bearing, Curved Plane Sliding Bearing, Plane Sliding Bearing, Plane Roller Bearing, Rail Roller Bearing. Hasil test menunjukkan bahwa untuk jenis rubber bearing, dapat mengalami simpangan bolak-balik antara ±100 sampai ±300 mm, untuk gaya geser 300 sampai 400 kN, jenis sliding
bearing antara +100 sampai +300mm untuk gava geser 20 sampai 160 kN, dan jenis roller bearing, hingga +100 mm untuk gava geser kurang dari 20 kN.
3. Perilaku Isolasi Dasar (Base Isolation) pada Bangunan
Beberapa hasil observasi perilaku isolasi dasar yang dilakukan oleh para ahli gempa di Jepang telah dipublikasikan. Hasil observasi tersebut sebagai akibat dari gempa "The Tokachi-Oki Earthquake in 2003" vang melanda kawasan Utara Jepang pada 26 September 2003, Magnitude 8.0 skala JMA, kedalaman focal sekitar 42 km. Hasilnya sebagai berikut: Kajima, et al. (2004) mengobservasi bangunan konstruksi beton tulang berlantai 9 dengan satu lantai basement di kota Kushiro. Takenaka, et al. (2004) mengobservasi bangunan kantor dari beton tulang berlantai 3 di kota Kushiro. Sakai, et al. (2004) mengobservasi bangunan rumah sakit dari konstruksi beton tulang berlantai 3. Todo dan Seki (2004) mengobservasi bangunan perbankan beton bertulang berlantai 7 dengan basement. Pada masing-masing bangunan tersebut dipasang kombinasi beberapa rubber bearings, lead dampers dan steel dampers. Dari hasil observasi tersebut dicatat nilai tertinggi percepatan maksimum permukaan tanah 280 cm/detik² dan displacement maksimum pada tumpuan isolasi sekitar 30 cm, terjadi pada bangunan kantor yang diobservasi oleh Takenaka. Nilai reduksi terbesar percepatan terdapat pada hasil observasi Kajima dengan reduksi >50% percepatan basement.
Dari catatan di atas belum dilaporkan penggunaan isolasi pada bangunan rumah tinggal. Narayan C.K., Kumar S.A. and Maharajan S. (2003) mengatakan bahwa sistem rolling termasuk roller silinder dan bola pada umumnya diaplikasikan pada mesin-mesin. Karena sifat bola yang dapat menggelinding dengan bebas ke semua arah, karakteristik ini dapat dimanfaatkan untuk mereduksi beban gempa secara efektif.
4. Pemodelan Sistem Isolasi Seismik
Suatu sistem yang bergetar akibat pengaruh gaya luar, dapat digambarkan dalam bentuk yang diidealisir seperti berikut:
Gambar 1. (a) Struktur diidealisir, (b) Model matematis (Paz, 1996)
Persamaan matematik untuk sistem ini sebagai berikut:
\[F_t = m.a + c.v + k.x \tag{1}\]
dimana Ft = gaya, m = massa, a = percepatan, c = koefisien redaman, v = kecepatan, k = konstanta pegas dan x = perpindahan.
Massa pada penelitian ini tidak disokong oleh kolom pemikul tetapi menyatu dengan dudukannya yaitu rumah bola (Gambar 2). Dengan demikian tidak terdapat gaya pemulih (gaya pegas) maupun gaya redaman dalam sistem. Massa mengikuti gerakan dudukannya, sesuai Hukum Newton sebagai berikut:
\[F_t = m.a \tag{2}\]
Sasaran perencanaan tahan gempa adalah bagaimana mereduksi gaya inersia (m.a) tersebut, salah satunya adalah mereduksi percepatan massa dengan memasang sistem isolasi. Sistem isolasi dengan tumpuan gelinding di modelkan seperti Gambar 2.
Jika tidak ada friksi dalam sistem (kontak antara massa, bola dan meja getar licin sempurna), massa akan tetap diam ditempatnya sewaktu meja bergetar (energi getaran secara teoritis diredam 100%). Jadi gaya penggerak massa hanyalah akibat friksi tersebut, yang akan diukur pada penelitian ini. Sasaran yang ingin dicapai adalah rasio as/am yang rendah.
5. Cara Pengujian
5.1 Peralatan uji
Gambar 2. Model isolasi tumpuan gelinding. as dan am adalah percepatan massa dan meja getar. xs dan xm perpindahannya (Bontong, et al., 2009).
Meja getar menyimulasikan gerakan siklis permukaan (gerakan maju-mundur), digerakkan oleh motor AC 220 V single phase, 1400 cpm (cycles per minute). Frekuensi diukur dengan tachometer digital: DEKO TC 2234 L, kapasitas 5 s/d. 99.999 cpm ketelitian 0,05%.
Massa model dibuat dari beton berukuran 40x40x3,5 cm dengan massa 12,5 kg, sebanyak 6 buah. Dudukan massa dari pelat besi ukuran 40x40 cm, pada keempat sudutnya dipasang rumah bola. Rumah bola dibuat dua variasi yaitu berbentuk 1/2 bola dan berbentuk silinder belah. Untuk mengarahkan gerakan massa dalam satu arah, digunakan rel yang dipasang di atas meja getar, sejajar dengan arah gerakan meja getar.
Gerakan massa relatif terhadap lantai direkam pada kertas skala milimeter yang dirakit pada sepasang kaki penahan yang berdiri bebas di atas lantai (Lihat Gambar 3). Hasil rekaman menampilkan kurva perpindahan massa terhadap waktu. Lamanya waktu perekaman dicatat dengan menggunakan stop watch. Friksi dalam sistem isolasi diukur dengan proving ring terkalibrasi.
Keterangan gambar:
- 1. Meja getar
- 2. Unit motor penggerak
- 3. Pencatat perpindahan massa (ball point dan kertas skala dalam gulungan rol)
- 4. Roda meja getar
- 5. bola isolator, sekaligus pendukung massa, diameter 1 1/8 inci (28,58 mm)
- 6. Puli pengatur frekuensi m= massa model didukung oleh 4 bola baja.
- E= eksentrisitas poros pemutar (amplitudo meja = e), nilai e divariasikan.
Gambar 3. Alat uji model. (a) Skets tampak samping, (b) Skets tampak depan, (c) Foto alat (d) rumah bola berbentuk ½ bola, (e) Rumah bola berbentuk tabung (silinder) bela (Bontong, et al., 2009)
5.2 Rancangan parameter input
Massa dibuat 4 variasi yaitu 12.5 kg, 25 kg, 50 kg dan 75 kg. Frekuensi getaran meja dibuat dua variasi yaitu 151 cpm (15.8 rad/s) dan 240 cpm (25.2 rad/s). Amplitudo gerakan maju mundur meja getar dibuat 3 variasi berturut-turut 5, 10 dan 20 mm.
5.3 Parameter output
Rekaman pada kertas skala menampilkan kurva respons perpindahan massa vs waktu. Frekuensi getaran massa didapat dengan menghitung jumlah siklus yang terekam dibagi dengan lamanya waktu perekaman.
5.4 Prediksi dengan program simulink
Getaran massa dapat diprediksi dengan program simulink yang ada pada Mathlab. Dari Persamaan (2), dapat ditulis persamaan respons gerakan massa untuk beban friksi harmonik:
\[mx_s\]" = \(f_r.sinw.t = \mu.N.sinw.t\) (3)
dimana \(f_r\) = gaya friksi, \(\mu\) = koefisien friksi system dan N = gaya normal. Persamaan ini dapat ditulis dalam bentuk:
\[A_{m.}sinw.t(\mu.g/A_{m}) = x_{s}\] (4)
Dimana \(A_m\) = amplitudo meja getar. Diagram blok simulink untuk solusi Persamaan (4) sebagai berikut:
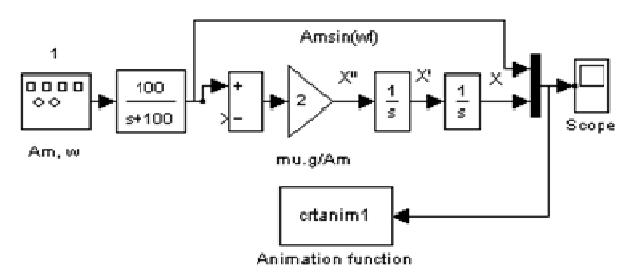
Gambar 4. Diagram blok simulink (Matlab Version 6.5 Release 13)
\(A_m\) dan w diinput pada signal generator (blok 1); \(\mu\).g/ A<sub>m</sub>. dimasukkan pada Gain (blok 2). Output program simulink menampilkan kurva perpindahan massa vs waktu.
6. Analisis Data dan Pembahasan
6.1 Friksi dalam sistem
Tabel 1. Hasil pengukuran friksi
| Massa (kg) | Gaya friksi (N) | ||||
|---|---|---|---|---|---|
| Rumah bola silinder belah | Rumah bola 1/2 bola | ||||
| 12.5 | 1.15 | 13.7 | |||
| 25 | 2.19 | 25.4 | |||
| 50 | 4.54 | 44.8 | |||
| 75 | 6.73 | 65.6 | |||
| Tangen sudut friksi | 0.009 | 0.083 | |||
Sumber: Bontong, et al., 2009
6.2 Hasil pengukuran dan analisis respons massa
Rekaman respons massa diperlihatkan penggalan contohnya pada Gambar 5. Dari rekaman tersebut jumlah siklus selama waktu pengamatan dihitung. Amplitudo dibaca pada kurva berdasarkan skala gambar. Untuk contoh ini, amplitudo = ½ dari 0,6 mm = 0,3 mm (simpangan maksimum terhadap garis netral).
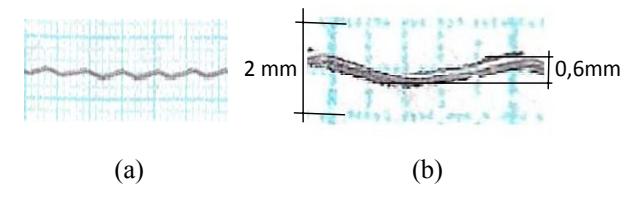
Gambar 5. Menentukan amplitudo (a) Contoh rekaman perpindahan terhadap waktu. (b). Menentukan amplitudo berdasarkan skala gambar (Bontong, et al., 2009)
Dimisalkan percepatan meja getar \(a_m\) dan percepatan massa \(a_s\), amplitudo meja getar \(A_m\) dan amplitudo massa \(A_s\). Hasilnya sebagai berikut:
Tabel 2. Respons untuk rumah bola berbentuk silinder belah pada frekuensi meja getar +151 cpm (+15.8 rad/s
| Meja getar | Respor | is massa | Perce | patan | Ratio | Reduksi | ||
|---|---|---|---|---|---|---|---|---|
| Massa (kg) | Am | W (wad/a) | As | W (vod/s) | a m | \(a_s\) | \(a_s/a_m\) | Percepatan |
| (mm) | (rad/s) | (mm) | (rad/s) | gals | gals | % | % | |
| 12.5 | 5 | 15.79 | 0.4 | 15.83 | 125 | 10.0 | 8.0% | 92.0% |
| 10 | 15.84 | 0.4 | 15.86 | 251 | 10.0 | 4.0% | 96.0% | |
| 20 | 15.84 | 0.5 | 15.89 | 502 | 12.6 | 2.5% | 97.5% | |
| 25 | 5 | 15.89 | 0.4 | 15.94 | 126 | 10.2 | 8.1% | 91.9% |
| 10 | 15.84 | 0.4 | 15.84 | 251 | 10.0 | 4.0% | 96.0% | |
| 20 | 15.81 | 0.5 | 15.94 | 500 | 12.7 | 2.5% | 97.5% | |
| 50 | 5 | 15.87 | 0.4 | 15.70 | 126 | 9.9 | 7.8% | 92.2% |
| 10 | 15.84 | 0.4 | 15.90 | 251 | 10.1 | 4.0% | 96.0% | |
| 20 | 15.77 | 0.5 | 15.88 | 497 | 12.6 | 2.5% | 97.5% | |
| 75 | 5 | 15.95 | 0.4 | 15.95 | 127 | 10.2 | 8.0% | 92.0% |
| 10 | 15.89 | 0.4 | 15.89 | 252 | 10.1 | 4.0% | 96.0% | |
| 20 | 15.77 | 0.4 | 15.83 | 497 | 10.0 | 2.0% | 98.0% | |
Tabel 3. Respons untuk rumah bola berbentuk silinder belah pada frekuensi meja getar +240 cpm (+ 25.2 rad/s)
| Meja getar | Respo | Respons massa | Percepatan | Reduksi | ||||
|---|---|---|---|---|---|---|---|---|
| Massa (kg) | \(\mathbf{A}_{\mathbf{m}}\) | w | \(A_s\) | w (rad/s) | \(a_m\) | \(a_s\) | \(a_s/a_m\) | Percepatan |
| (mm) | (rad/s) | (mm) | w (radis) | gals | gals | % | % | |
| 12.5 | 5 | 25.19 | 0.2 | 25.18 | 317 | 12.7 | 4.0% | 96.0% |
| 10 | 25.15 | 0.2 | 25.24 | 633 | 12.7 | 2.0% | 98.0% | |
| 20 | 25.19 | 0.2 | 25.24 | 1269 | 12.7 | 1.0% | 99.0% | |
| 25 | 5 | 25.17 | 0.2 | 25.14 | 317 | 12.6 | 4.0% | 96.0% |
| 10 | 25.19 | 0.2 | 25.14 | 634 | 12.6 | 2.0% | 98.0% | |
| 20 | 25.19 | 0.2 | 25.23 | 1269 | 12.7 | 1.0% | 99.0% | |
| 50 | 5 | 25.17 | 0.2 | 25.19 | 317 | 12.7 | 4.0% | 96.0% |
| 10 | 25.16 | 0.2 | 25.16 | 633 | 12.7 | 2.0% | 98.0% | |
| 20 | 25.15 | 0.2 | 25.36 | 1265 | 12.9 | 1.0% | 99.0% | |
| 75 | 5 | 25.21 | 0.2 | 25.24 | 318 | 12.7 | 4.0% | 96.0% |
| 10 | 25.16 | 0.3 | 25.07 | 633 | 15.7 | 2.5% | 97.5% | |
| 20 | 25.20 | 0.3 | 25.26 | 1270 | 19.1 | 1.5% | 98.5% | |
Sumber: Bontong, et al., 2009
Tabel 4. Respons untuk rumah bola berbentuk 1/2 bola pada frekuensi meja getar+ 151 cpm (+ 15.8 rad/s)
| M | Meja getar | Respons massa | Percepatan | Ratio | Reduksi | |||
|---|---|---|---|---|---|---|---|---|
| Massa (kg) | \(\mathbf{A}_{\mathbf{m}}\) | w | \(A_s\) | w | \(a_m\) | \(a_s\) | \(a_m/a_s\) | Percepatan |
| ( 0) | (mm) | (rad/s) | (mm) | (rad/s) | gals | gals | % | % |
| 12.5 | 5 | 15.85 | 3.5 | 15.94 | 126 | 88.9 | 70.7% | 29.3% |
| 10 | 15.79 | 4.0 | 15.77 | 249 | 99.4 | 39.9% | 60.1% | |
| 20 | 15.83 | 3.0 | 15.80 | 501 | 74.9 | 14.9% | 85.1% | |
| 25 | 5 | 15.84 | 3.0 | 15.84 | 126 | 75.3 | 60.0% | 40.0% |
| 10 | 15.79 | 4.0 | 15.87 | 249 | 100.7 | 40.4% | 59.6% | |
| 20 | 15.81 | 3.5 | 15.89 | 500 | 88.4 | 17.7% | 82.3% | |
| 50 | 5 | 15.85 | 3.0 | 15.88 | 126 | 75.6 | 60.2% | 39.8% |
| 10 | 15.87 | 3.5 | 15.80 | 252 | 87.4 | 34.7% | 65.3% | |
| 20 | 15.83 | 4.0 | 15.87 | 501 | 100.8 | 20.1% | 79.9% | |
| 75 | 5 | 15.85 | 3.5 | 15.87 | 126 | 88.1 | 70.1% | 29.9% |
| 10 | 15.85 | 3.5 | 15.82 | 251 | 87.6 | 34.9% | 65.1% | |
| 20 | 15.81 | 3.5 | 15.83 | 500 | 87.7 | 17.5% | 82.5% | |
Tabel 5. Respons untuk rumah bola berbentuk 1/2 bola pada frekuensi meja getar +240 cpm (+ 25.2 rad/s)
| M | Meja getar | Respor | Respons massa | patan | Ratio | Reduksi | ||
|---|---|---|---|---|---|---|---|---|
| Massa (kg) | \(\mathbf{A}_{\mathbf{m}}\) | w | \(A_s\) | w | \(a_m\) | \(a_s\) | \(a_s/a_m\) | Percepatan |
| (mm) | (rad/s) | (mm) | (rad/s) | gals | gals | % | % | |
| 12.5 | 5 | 25.14 | 1.5 | 25.16 | 316 | 95.0 | 30.0% | 70.0% |
| 10 | 25.16 | 1.5 | 25.13 | 633 | 94.7 | 15.0% | 85.0% | |
| 20 | 25.16 | 1.5 | 25.19 | 1266 | 95.2 | 7.5% | 92.5% | |
| 25 | 5 | 25.20 | 1.5 | 25.16 | 317 | 94.9 | 29.9% | 70.1% |
| 10 | 25.13 | 1.5 | 25.13 | 632 | 94.7 | 15.0% | 85.0% | |
| 20 | 25.15 | 1.5 | 25.20 | 1265 | 95.2 | 7.5% | 92.5% | |
| 50 | 5 | 25.15 | 1.5 | 25.22 | 316 | 95.4 | 30.2% | 69.8% |
| 10 | 25.19 | 1.5 | 25.17 | 634 | 95.1 | 15.0% | 85.0% | |
| 20 | 25.13 | 1.5 | 25.17 | 1263 | 95.0 | 7.5% | 92.5% | |
| 75 | 5 | 25.19 | 1.5 | 25.20 | 317 | 95.2 | 30.0% | 70.0% |
| 10 | 25.17 | 1.5 | 25.13 | 634 | 94.7 | 15.0% | 85.0% | |
| 20 | 25.14 | 1.5 | 25.17 | 1264 | 95.0 | 7.5% | 92.5% | |
Sumber: Bontong, et al., 2009
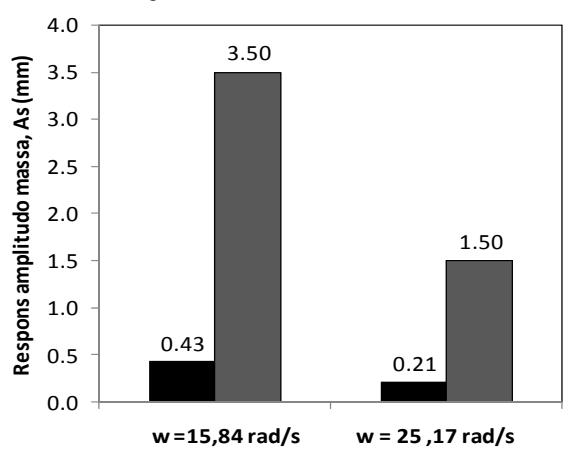
Gambar 5. Hubungan antara frekuensi, bentuk rumah bola dengan respons amplitudo massa (Bontong, et al., 2009)
Rumah 1/2 hola
■ Rumah tabung belah
6.3 Pembahasan hasil
Tabel 2 sampai Tabel 5 menunjukkan bahwa untuk setiap tipe rumah bola dan frekuensi meja getar, dengan perlakuan variasi amplitudo meja getar 5, 10 dan 20 mm dan variasi massa 12,5, 25, 50 dan 75 kg, menimbulkan respons amplitudo massa \(A_s\) pada nilai vang dapat dikatakan konstan. Dengan kata lain respons amplitudo massa tidak dipengaruhi oleh perubahan amplitudo meja getar maupun perubahan besarnya massa, tetapi dipengaruhi oleh tipe rumah bola dan frekuensi meia getar. Demikian pula respons frekuensi massa ω<sub>s</sub> konstan dan sama dengan frekuensi meja getar \(\omega_m\). \((\omega_s = \omega_m = \omega)\).
Gambar 6 menunjukkan bahwa semakin tinggi frekuensi getaran ω, semakin rendah respons amplitudo massa A<sub>s</sub> untuk masing-masing tipe rumah bola. Nilai A<sub>s</sub> untuk rumah bola berbentuk silinder belah jauh lebih kecil dibandingkan dengan rumah bola berbentuk ½ bola, dengan rasio 1:8 untuk frekuensi 15,84 rad/s dan 1:7 untuk frekuensi 25,17 rad/s. Hal ini seirama dengan ratio gaya friksi antara kedua tipe rumah bola sebesar rata-rata 1:10.8
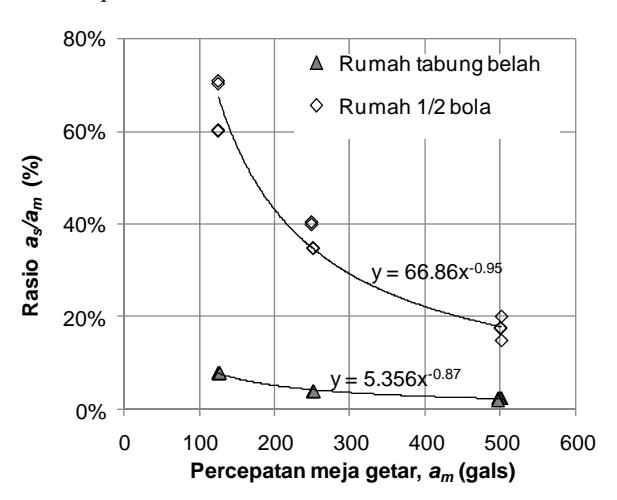
Gambar 6. Hubungan antara percepatan meja getar am dengan rasio as/am untuk frekuensi rata-rata 15.8 Rad/s (Bontong, et al., 2009)
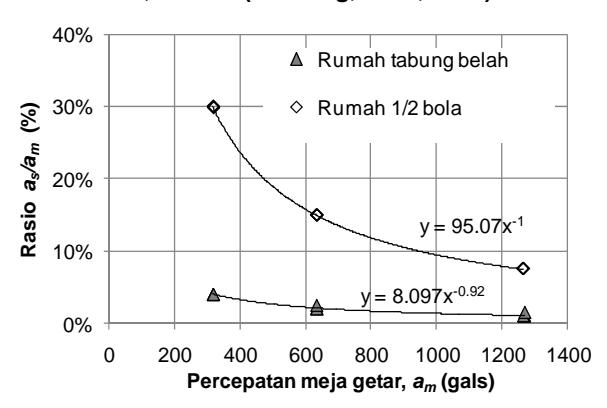
Gambar 7. Hubungan antara percepatan meja getar am dengan rasio as/am untuk frekuensi rata-rata 25.2 Rad/s (Bontong, et al., 2009)
Pada Gambar 7 dan 8, parameter y adalah rasio percepatan massa dengan percepatan meja getar (y = as/am). Nilai y = 1 bila tidak ada isolasi, dan bernilai nol bila sistem isolasi dapat meredam 100% pengaruh getaran meja. Semakin besar percepatan meja getar semakin kecil y, yang berarti semakin besar reduksi percepatan meja yang diteruskan ke massa, (semakin efektif kinerja isolasi). Trend hubungan tersebut didekati dengan persamaan pangkat:
y = p.xqdimana p dan q adalah konstanta.
Pada Tabel 2 dan 3 (rumah silinder belah) dapat dilihat bahwa percepatan meja dapat diredam sebesar 92% sampai 99% sedangkan untuk rumah bola berbentuk ½ bola (Tabel 4 dan 5) dapat diredam sekitar 30% sampai 92 %.
Tabel 2 sampai dengan Tabel 5 di atas, menunjukkan bahwa respons percepatan massa as boleh dikatakan tidak tergantung kepada amplitudo Am maupun percepatan meja getar am, tetapi tergantung kepada ω. Nilai rata-rata as diperlihatkan pada Gambar 9, dimana rumah bola berbentuk silinder belah menghasilkan respons percepatan massa jauh lebih kecil dibandingkan dengan rumah bola berbentuk ½ bola, dengan perbandingan 1 : 8,2 pada frekuensi ω =15,8 rad/s, dan 1:7 untuk frekuensi ω =25,2 rad/s. (Gambar 9)
Respons Massa yang diprediksi dengan Program Simulink berdasarkan gaya friksi dalam system (lihat Tabel 1), salah satu hasilnya diperlihatkan pada Gambar 10.
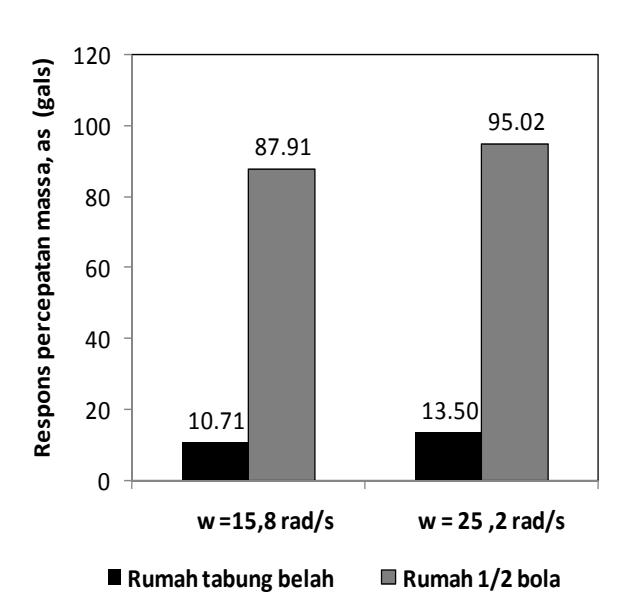
Gambar 8. Hubungan antara frekuensi ω dengan respon rata-rata percepatan massa as (Bontong, et al., 2009)
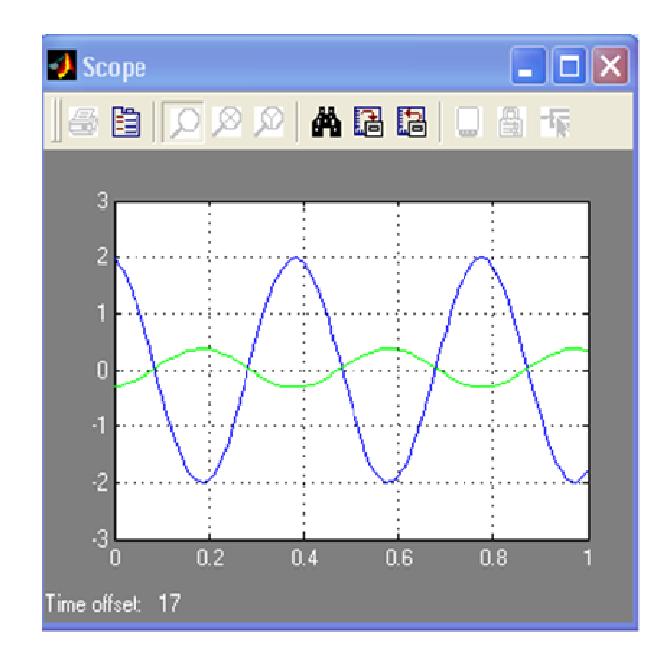
Gambar 9. Simulasi respons amplitudo massa As vs waktu pada frekuensi 15,8 rad/s, Am 2 cm, rumah bola berbentuk ½ bola (Bontong, et al., 2009)
Perbandingan antara respons amplitudo massa ratarata hasil pengujian dengan hasil silumasi program Simulink (diambil beberapa contoh) pada tabel berikut:
Tabel 6. Respons amplitudo massa hasil pengujian dan hasil simulasi untuk Rumah ½ Bola
| Gaya | w Friksi Meja Getar, (rad/s) (N) | Amplitudo | Respons Amplitudo Massa, As (mm) | ||
|---|---|---|---|---|---|
| Am (mm) | Rataan hasil uji | Simulasi Mathlab | |||
| 65.5 | 15.80 | 20 | 3.5 | 3.5 | |
| 65.5 | 15.80 | 5 | 3.3 | 3.5 | |
| 65.5 | 25.20 | 20 | 1.5 | 1.5 | |
Sumber: Bontong, et al., 2009
Tabel 7. Respons amplitudo massa hasil pengujian dan hasil simulasi untuk rumah berbentuk silinder belah
| Gaya Friksi | w | Amplitudo Meja Getar, Am (mm) | Respons Amplitudo Massa, As (mm) | ||
|---|---|---|---|---|---|
| (N) | (rad/s) | Rataan hasil uji | Simulasi Mathlab | ||
| 6.7 | 15.80 | 5 | 0.43 | 0.4 | |
| 6.7 | 25.20 | 5 | 0.21 | 0.2 | |
Sumber: Bontong, et al., 2009
Pada Tabel 6 dan 7 dapat dilihat bahwa respons amplitudo massa hasil pengujian maupun hasil prediksi simulasi program Simulink menunjukkan nilai yang secara praktis dapat dikatakan sama. Dengan demikian hasil yang didapatkan untuk rentang parameter yang digunakan dalam pengukuran dipandang cukup akurat.
6.4 Diskusi
Bola isolator dalam rumah berbentuk ½ bola ternyata tidak berotasi dalam rumahnya saat digeser, tetapi bergeser (bertranslasi) di atas permukaan. Hal ini disebabkan luas bidang kontak antara permukaan bola isolator dengan permukaan rumah ½ bola jauh lebih besar dibandingkan dengan luas bidang kontak antara bola isolator dengan lantai. Jadi hambatan friksi untuk berotasi dalam rumah ½ bola lebih besar daripada hambatan friksi untuk bergeser di atas lantai. Untuk rumah ½ bola, sifat bola yang bebas menggelinding ke semua arah tidak dapat dimanfaatkan karena ternyata hanya bergeser di atas permukaan (berfungsi sebagai slider saja).
Bolah isolator dalam rumah berbentuk silinder belah bebas menggelinding baik terhadap rumah bola mapupun di atas lantai. Hal ini mengakibatkan rumah bola berbentuk silinder belah jauh lebih efektif meredam pengaruh getaran dibandingkan dengan yang berbentuk ½ bola.
7. Kesimpulan
- 1. Respons amplitudo massa As pada setiap frekuensi ω dan tipe rumah bola secara praktis dapat dikatakan konstan dalam rentang variasi amplitudo meja getar Am dari 5 sampai dengan 20 mm dan massa m dari 12,5 sampai dengan 75 kg.
- 2. Semakin tinggi frekuensi ω semakin tinggi pula respons percepatan massa as, tetapi sebaliknya semakin rendah respons amplitudo massa As
- 3. Semakin tinggi percepatan meja getar am, semakin besar persentase redaman percepatan yang diteruskan ke massa. Dalam rentang parameter input yang diaplikasikan, untuk rumah bola berbentuk tabung belah, redaman percepatan mulai dari 92% (pada am terendah) sampai dengan 99 % (am tertinggi), sedangkan untuk rumah bola berbentuk ½ bola, mulai dari 35% (pada am terrendah) sampai dengan 92 % (am tertinggi).
- 4. Rumah bola berbentuk silinder belah jauh lebih efektif meredam pengaruh getaran dibandingkan dengan rumah bola berbentuk ½ bola. Hal ini sangat nyata pada perbandingan respons percepatan massa as yaitu untuk frekuensi ω = 15.8 rad/s, perbandingannya adalah 1:8 dan pada ω = 25.2 rad/ s, 1:7.
7.1 Saran
- 1. Penelitian pada tahun pertama ini difokuskan pada respons dinamik isolasi bola dalam gerakan satu arah. Penelitian perlu dilanjutkan untuk mengamati respons sistem dalam kedua arah salib sumbu sistem massa model.
- 2. Bola isolasi bergerak bebas dalam rumah bola dan memiliki kesetimbangan netral di atas permukaan mendatar sehingga posisi bola pasca getaran mudah bergeser dari posisi semula. Untuk mengembalikan ke posisi semula, direncanakan memasang pegas pengembali yang perlu diteliti kinerjanya.
- 3. Untuk mengetahui kekuatanan tekan bola yang berfungsi ganda sebagai isolator dan sekaligus pendukung massa, perlu dilakukan uji tekan pada beberapa variasi diameter bola.
Ucapan Terima Kasih
Tim peneliti mengucapkan terima kasih yang sebesarbesarnya kepada Direktorat Penelitian dan Pengabdian Kepada Masyarakat, Direktorat Jenderal Pendidikan Tinggi, Departemen Pendidikan Nasional, yang telah mendanai penelitian ini, berdasarkan kontrak Nomor: 2237/H28/PL/2009, Tanggal 25 April 2009, dan pihak -pihak lain yang membantu terselenggaranya penelitian ini.