
1. Pendahuluan
Perencanaan bangunan pantai yang terdapat di perairan pantai memerlukan informasi kondisi gelombang dengan baik, dimana gelombang dalam perjalanannya menuju perairan pantai mengalami perubahan akibat sejumlah fenomena yaitu antara lain, shoaling, wave setdown, wave setup, dispersi dan breaking. Penelitian ini bertujuan untuk mendapatkan suatu model gelombang yang dapat memodelkan berbagai fenomena transformasi gelombang tersebut. Pengembangan model dilakukan dengan memperbaiki persamaan kontinuitas dan tekanan hidrodinamik pada persamaan momentum dari Euler.
Persamaan kontinuitas yang selama ini sudah dikenal dan digunakan dalam setiap analisis hidrodinamika dirumuskan berdasarkan anggapan bahwa tidak terdapat percepatan lokal atau percepatan terhadap waktu pada selang waktu dt yang sangat kecil, sangat kecil pengaruhnya. Sementara itu pada perumusan persamaan momentum untuk fluida yang sama diperhitungkan percepatan lokal. Sehingga terdapat perbedaan tingkat ketelitian antara persamaan kontinuitas dengan persamaan momentum. Persamaan
momentum tersebut sebenarnya mengandung persamaan kontinuitas, yang tidak boleh dihilangkan, Hutahaean (2011). Agar unsur persamaan kontinuitas yang terdapat pada persamaan momentum mempunyai tingkat ketelitian yang sama, maka diperlukan suatu persamaan kontinuitas dimana diperhitungkan percepatan lokal.
Hutahaean (2008b) mengembangkan persamaan kontinuitas untuk fluida berakselerasi, dimana persamaan tersebut disebut dengan persamaan keseimbangan momentum mengingat bentuknya berupa keseimbangan antara percepatan pada arah sumbu-x, pada arah sumbu-y dan pada arah sumbu-z. Tetapi pada penelitian tersebut penerapan persamaan keseimbangan momentum pada persamaan momentum masih coba-coba saja tanpa prosedur perumusan yang jelas. Pada penelitian ini implementasi persamaan keseimbangan momentum pada persamaan momentum dirumuskan secara sistematis.
Tekanan hidrodinamik pada persamaan Euler dirumuskan dengan mengintegrasikan persamaan kontinuitas untuk fuida beraselerasi terhadap kedalaman. Dengan menggunakan tekanan
hidrodinamik seperti ini, maka interaksi antara persamaan momentum dengan persamaan kontinuitas menjadi lebih baik.
2. Persamaan Kontinuitas
Perumusan persamaan kontinuitas untuk fluida tidak berakselerasi atau berakselerasi kecil sudah banyak ditulis pada berbagai buku hidrodinamika maupun mekanika fluida. Untuk suatu keperluan, perumusan persamaan tersebut ditulis lagi.
Untuk merumuskan persamaan kontinuitas digunakan ruang tinjauan yang berukuran sangat kecil seperti terlihat pada Gambar 1 yang terletak pada suatu medan aliran dengan kecepatan aliran adalah u = u(x, y, z, t) untuk kecepatan arah horisontal-x, v = v(x, y, z, t) untuk kecepatan arah horisontal-y dan kecepatan arah vertikal-z w = w(x, y, z, t). Perumusan persamaan kontinuitas dilakukan dengan anggapan volume control-volume tetap dan air adalah fluida yang tak mampat dimana rapat masa \(\rho\) konstan. Pada control-volume tersebut terdapat input dan output air, yang dalam selang waktu \(\delta t\) terdapat masa air yang masuk sebanyak,
\[I = \rho u \delta y \delta z \delta t + \rho v \delta x \delta z \delta t + \rho w \delta x \delta y \delta t \tag{1}\]
sedangkan air yang keluar adalah,
\[O = (\rho u + \delta \rho u) \delta y \delta z \delta t + (\rho v + \delta \rho v) \delta x \delta z \delta t + (\rho w + \delta \rho w) \delta x \delta y \delta t\] (2)
Dengan adanya input-output tersebut, maka terdapat masa air yang tertinggal pada control-volume sebesar,
\[\delta m = I - O \tag{3}\]
Dengan volume ruang yang tetap maka \(\delta m = \delta \rho \delta x \delta y \delta\) z. Persamaan input-output menjadi,
\[\delta\rho\delta x\delta y\delta z = \rho u\delta y\delta z\delta t + \rho v\delta x\delta z\delta t + \rho w\delta x\delta y\delta t\]\[-(\rho u + \delta\rho u)\delta y\delta z\delta t + (\rho v + \delta\rho v)\delta x\delta z\delta t + (\rho w + \delta\rho w)\delta x\delta y\delta t\](4)
Dengan menjumlahkan suku yang sama,
\[\delta\rho\delta x \delta y \delta z = -\delta(\rho u)\delta y \delta z \delta t - \delta(\rho v)\delta x \delta z \delta t - \delta(\rho w)\delta x \delta y \delta t\] (5)
Persamaan dibagi dengan δxδyδzδt dan ruas kanan persamaan dipindahkan kekiri,
\[\frac{\delta \rho}{\delta t} + \frac{\delta(\rho u)}{\delta x} + \frac{\delta(\rho v)}{\delta v} + \frac{\delta(\rho w)}{\delta z} = 0 \tag{6}\]
Untuk fluida tak mampat, dimana rapat masa \(\rho\) konstan, maka
\[\frac{\delta u}{\delta x} + \frac{\delta v}{\delta y} + \frac{\delta w}{\delta z} = 0 \tag{7}\]
Pada limit \(\delta x\), \(\delta y\), \(\delta z\), \(\rightarrow 0\)
\[\frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} + \frac{\partial w}{\partial z} = 0 \tag{8}\]
Persamaan ini disebut dengan persamaan kekekalan masa atau lebih dikenal dengan persamaan kontinuitas. Yang perlu mendapat perhatian disini adalah pendefinisian dari \(\delta u/\delta x\), \(\delta v/\delta y\) dan \(\delta w/\delta z\) dimana ketiga suku tersebut dianggap konstan dalam selang waktu \(\delta t\) yang kecil atau percepatan lokal diabaikan. Dengan pengabaian tersebut maka terdapat ketidak setaraan antara persamaan kontinuitas dengan persamaan momentum, dimana untuk ruang tinjau yang sama pada perumusan persamaan momentum terdapat percepatan lokal.
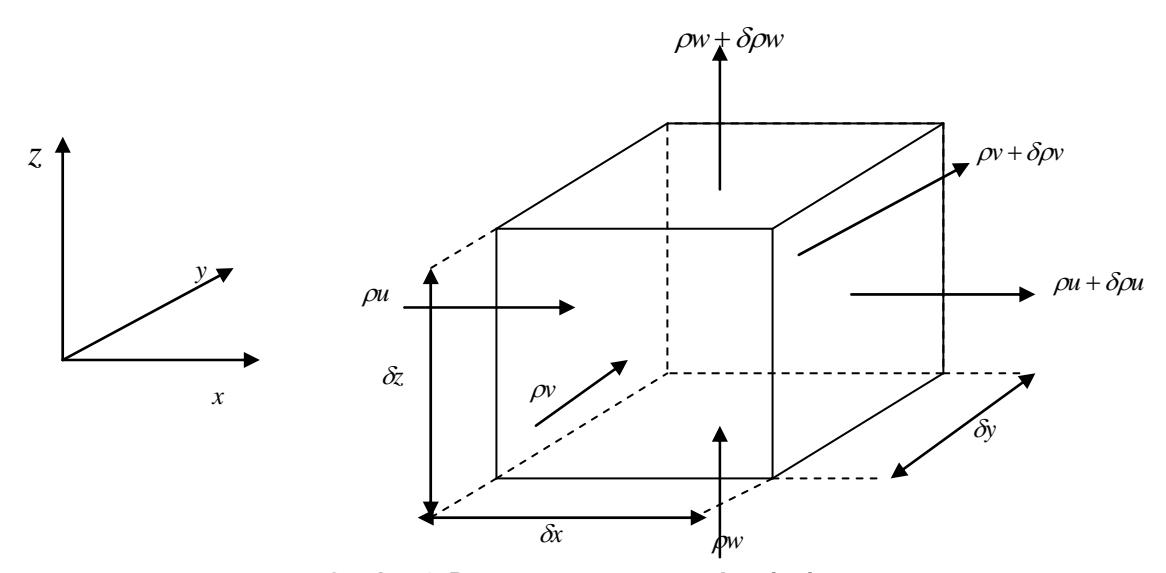
Gambar 1. Perumusan persamaan kontinuitas
3. Persamaan Kontinuitas untuk Fluida Beraselerasi
a. Tinjauan percepatan total
Agar terdapat kesetaraan antara persamaan kontinuitas dengan persamaan momentum, maka persamaan kontinuitas akan dirumuskan dengan menggunakan cara yang sama seperti pada perumusan percepatan pada persaman momentum. Persamaan percepatan pada persamaan momentum arah-x adalah
\[a_{x} = \frac{Du}{Dt} = \frac{\partial u}{\partial t} + \left( u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} \right)\](9)
\[\frac{Du}{Dt}\] = percepatan total, \(\frac{\partial u}{\partial t}\) = percepatan lokal dan
\[\left(u\frac{\partial u}{\partial x} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z}\right) = \text{percepatan konvektif. Persamaan}\]
ini dirumuskan dengan menggunakan deret Taylor orde n yaitu.
\[u(x + \delta x, y + \delta y, z + \delta z, t + \delta t) = u(x, y, z, t) + \delta x \frac{\partial u}{\partial x} + \delta y \frac{\partial u}{\partial y} + \delta z \frac{\partial u}{\partial z} + \delta t \frac{\partial u}{\partial t} + \frac{\delta x^2}{2} \frac{\partial^2 u}{\partial x^2} + \frac{\delta y^2}{2} \frac{\partial^2 u}{\partial y^2} + \frac{\delta z^2}{2} \frac{\partial^2 u}{\partial z^2} + \frac{\delta t^2}{2} \frac{\partial^2 u}{\partial t^2} + \delta x \delta y \frac{\partial^2 u}{\partial x \partial y} + \delta x \delta z \frac{\partial^2 u}{\partial x \partial z} + \delta y \delta z \frac{\partial^2 u}{\partial y \partial z} + \delta t \delta x \frac{\partial^2 u}{\partial t \partial x} + \delta t \delta y \frac{\partial^2 u}{\partial t \partial z} + \delta t \delta z \frac{\partial^2 u}{\partial t \partial z}\] \[(10)\]
Suku pertama pada ruas kanan persamaan dipindahkan kekiri, persamaan dibagi dengan δt serta dengan mengambil
\[\frac{\sin \lim_{\delta t} \lim_{\delta t} \int_{\delta t} \frac{\sin u}{\delta t} du}{\delta t} = v ; \frac{\partial z}{\partial t} = w\] (11)
dan suku-suku yang masih mengandung unsur δx atau δy atau δz ataupun δt akan mendekati nol juga atau sama dengan nol. Sedangkan
\[\frac{u(x+\delta x, y+\delta y, z+\delta z, t+\delta t) - u(x, y, t)}{\delta t} = \frac{Du}{Dt}\] (12)
b. Perumusan δu/δx, δv/δv dan δw/δz dengan memperhitungkan percepatan lokal
\(\delta u/\delta x\), \(\delta v/\delta y\) dan \(\delta w/\delta z\) dengan memperhitungkan percepatan lokal (δu/δt, δv/δt dan δ \(w/\delta t\))
akan digunakan juga deret Taylor. Sebagai ilustrasi \(\delta u/\delta x\)dikeriakan perumusan menggunakan Persamaan (10). Suku ke 1 ruas kanan Persamaan (10) dipindahkan kekiri,
\[\delta u = \delta x \frac{\partial u}{\partial x} + \delta y \frac{\partial u}{\partial y} + \delta z \frac{\partial u}{\partial z} + \delta t \frac{\partial u}{\partial t}\] \[+ \frac{\delta x^2}{2} \frac{\partial^2 u}{\partial x^2} + \frac{\delta y^2}{2} \frac{\partial^2 u}{\partial y^2} + \frac{\delta z^2}{2} \frac{\partial^2 u}{\partial z^2} + \frac{\delta t^2}{2} \frac{\partial^2 u}{\partial t^2}\] \[+ \delta x \delta y \frac{\partial^2 u}{\partial x \partial y} + \delta x \delta z \frac{\partial^2 u}{\partial x \partial z} + \delta y \delta z \frac{\partial^2 u}{\partial y \partial z}\] \[+ \delta t \delta x \frac{\partial^2 u}{\partial t \partial x} + \delta t \delta y \frac{\partial^2 u}{\partial t \partial y} + \delta t \delta z \frac{\partial^2 u}{\partial t \partial z}\](13)
dimana didefinisikan \(\delta u = u(x+\delta x,y+\delta y,z+\delta z,t+\delta t)-u\)(x,y,z,t). Terlihat bahwa pada δu terdapat pengaruh percepatan lokal. Unsur 8t pada ruas kanan persamaan dikeluarkan, dan persamaan dibagi dengan
\[\frac{\delta u}{\delta x} = \left(\frac{\delta x}{\delta t} \frac{\partial u}{\partial x} + \frac{\delta y}{\delta t} \frac{\partial u}{\partial y} + \frac{\delta z}{\delta t} \frac{\partial u}{\partial z} + \frac{\partial u}{\partial t}\right) \frac{\delta t}{\delta x} + \left(\frac{\delta x^2}{2\delta t} \frac{\partial^2 u}{\partial x^2} + \frac{\delta y^2}{2\delta t} \frac{\partial^2 u}{\partial y^2} + \frac{\delta z^2}{2\delta t} \frac{\partial^2 u}{\partial z^2} + \frac{\delta t}{2} \frac{\partial^2 u}{\partial t^2}\right) \frac{\delta t}{\delta x} + \left(\frac{\delta x}{\delta t} \delta y \frac{\partial^2 u}{\partial x \partial y} + \frac{\delta x}{\delta t} \delta z \frac{\partial^2 u}{\partial x \partial z} + \frac{\delta y}{\delta t} \delta z \frac{\partial^2 u}{\partial y \partial z}\right) \frac{\delta t}{\delta x} + \left(\delta x \frac{\partial^2 u}{\partial t \partial x} + \delta y \frac{\partial^2 u}{\partial t \partial y} + \delta z \frac{\partial^2 u}{\partial t \partial z}\right) \frac{\delta t}{\delta x} \tag{14}\]
Dengan cara yang sama akan diperoleh,
\[\frac{\delta v}{\delta y} = \left(\frac{\delta x}{\delta t} \frac{\partial v}{\partial x} + \frac{\delta y}{\delta t} \frac{\partial v}{\partial y} + \frac{\delta z}{\delta t} \frac{\partial v}{\partial z} + \frac{\partial v}{\partial t}\right) \frac{\delta t}{\delta y} + \left(\frac{\delta x^2}{2\delta t} \frac{\partial^2 v}{\partial x^2} + \frac{\delta y^2}{2\delta t} \frac{\partial^2 v}{\partial y^2} + \frac{\delta z^2}{2\delta t} \frac{\partial^2 v}{\partial z^2} + \frac{\delta t}{2} \frac{\partial^2 v}{\partial t^2}\right) \frac{\delta t}{\delta y} + \left(\frac{\delta x}{\delta t} \delta y \frac{\partial^2 v}{\partial x \partial y} + \frac{\delta x}{\delta t} \delta z \frac{\partial^2 v}{\partial x \partial z} + \frac{\delta y}{\delta t} \delta z \frac{\partial^2 v}{\partial y \partial z}\right) \frac{\delta t}{\delta y} + \left(\delta x \frac{\partial^2 v}{\partial t \partial x} + \delta y \frac{\partial^2 v}{\partial t \partial y} + \delta z \frac{\partial^2 v}{\partial t \partial z}\right) \frac{\delta t}{\delta y} \tag{15}\]
\[\frac{\delta w}{\delta z} = \left(\frac{\delta x}{\delta t} \frac{\partial w}{\partial x} + \frac{\delta y}{\delta t} \frac{\partial w}{\partial y} + \frac{\delta z}{\delta t} \frac{\partial w}{\partial z} + \frac{\partial w}{\partial t}\right) \frac{\delta t}{\delta z} + \left(\frac{\delta x^2}{2\delta t} \frac{\partial^2 w}{\partial x^2} + \frac{\delta y^2}{2\delta t} \frac{\partial^2 w}{\partial y^2} + \frac{\delta z^2}{2\delta t} \frac{\partial^2 w}{\partial z^2} + \frac{\delta t}{2} \frac{\partial^2 w}{\partial t^2}\right) \frac{\delta t}{\delta z}\]
\[+\left(\frac{\delta x}{\delta t}\delta y\frac{\partial^{2} w}{\partial x\partial y} + \frac{\delta x}{\delta t}\delta z\frac{\partial^{2} w}{\partial x\partial z} + \frac{\delta y}{\delta t}\delta z\frac{\partial^{2} w}{\partial y\partial z}\right)\frac{\delta t}{\delta z} + \left(\delta x\frac{\partial^{2} w}{\partial t\partial x} + \delta y\frac{\partial^{2} w}{\partial t\partial y} + \delta z\frac{\partial^{2} w}{\partial t\partial z}\right)\frac{\delta t}{\delta z}\](16)
Substitusi persamaan-persamaan untuk \(\delta u/\delta x\), \(\delta v/\delta y\) dan \(\delta w/\delta z\) ke Persamaan (7) dan dengan mengambil
\[\lim \delta x, \delta y, \delta z \text{ dan } \delta t \rightarrow 0, \quad \frac{\delta x}{\delta t} = u, \quad \frac{\delta y}{\delta t} = v, \quad \frac{\delta z}{\delta t} = w\] dan suku yang masih mengandung unsur \(\delta x\), \(\delta y\) \(\delta z\) akan hilang (menjadi 0) sehingga persamaan kekekalan masa (Persamaan (7)) menjadi,
\[\left(\frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z}\right) \frac{1}{u} + \left(\frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + w \frac{\partial v}{\partial z}\right) \frac{1}{v} + \left(\frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z}\right) \frac{1}{w} = 0\] (17)
Sesuai dengan bentuknya, Persamaan (17) ini oleh Hutahaean (2008b) disebut dengan persamaan keseimbangan momentum, meskipun sebenarnya juga merupakan persamaan kekekalan masa untuk fluida berakselerasi.
Persamaan (17) dapat ditulis dalam bentuk persamaan kontinuitas untuk fluida tidak berakselerasi,
\[\frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} + \frac{\partial w}{\partial z} = -\left(\frac{\partial u}{\partial t} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z}\right)\frac{1}{u}\]\[-\left(\frac{\partial v}{\partial t} + u\frac{\partial v}{\partial x} + w\frac{\partial v}{\partial z}\right)\frac{1}{v} - \left(\frac{\partial w}{\partial t} + u\frac{\partial w}{\partial x} + v\frac{\partial w}{\partial y}\right)\frac{1}{w}\]
Pada Persamaan (18) terlihat bahwa dengan memperhitungkan percepatan fluida, persamaan kontinuitas, Persamaan (8), tidak lagi nol. Apabila Persamaan (18) dikalikan dengan u dan diambil pada saat u = 0, maka persamaan menjadi \(\left(\frac{\partial u}{\partial t} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z}\right) = 0\)
dengan cara yang sama untuk v = 0 persamaan menjadi
\[\left(\frac{\partial v}{\partial t} + u\frac{\partial v}{\partial x} + w\frac{\partial v}{\partial z}\right) = 0 \text{ dan pada saat } w = 0 \text{ persamaan}\] \[\text{menjadi } \left(\frac{\partial w}{\partial t} + u\frac{\partial w}{\partial x} + v\frac{\partial w}{\partial y}\right) = 0\]
Jadi persamaan masih berlaku pada saat terdapat kecepatan berharga nol.
4. Tekanan Hidrodinamis pada Persamaan Euler
Persamaan momentum dari Euler adalah (Dear (1984)),
\[\frac{\partial u}{\partial t} + \left( u \frac{\partial u}{\partial x} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} \right) = -\frac{1}{\rho} \frac{\partial p}{\partial x}\](19)
\[\frac{\partial v}{\partial t} + \left( u \frac{\partial v}{\partial x} + v \frac{\partial v}{\partial y} + w \frac{\partial v}{\partial z} \right) = -\frac{1}{\rho} \frac{\partial p}{\partial y}\] (20)
\[\frac{\partial w}{\partial t} + \left( u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z} \right) = -\frac{1}{\rho} \frac{\partial p}{\partial z}\](21)
Dimana \(p=p_{hs}+p_{hd}\), \(p_{hs}\) = tekanan hidrostatis dan \(p_{hs}\) = tekanan hidrodinamis. Berdasarkan Dean (1984), \(p_{hs}\) = \(pg(\eta-z)\) dimana \(\eta=\eta(x,y,t)\) adalah persamaan muka air. Pengerjaan sifat turunan parsial pada percepatan konvektif pada ruas kiri persamaan momentum-x,
\[u\frac{\partial u}{\partial x} = \frac{\partial uu}{\partial x} - u\frac{\partial u}{\partial x} , \quad v\frac{\partial u}{\partial y} = \frac{\partial uv}{\partial y} - u\frac{\partial v}{\partial y} \quad dan\] \[w\frac{\partial u}{\partial z} = \frac{\partial uw}{\partial z} - u\frac{\partial w}{\partial z}\] (22)
Ketiga persamaan turunan parsial tersebut dijumlahkan,
\[u\frac{\partial u}{\partial x} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z} = \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} - u\left(\frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} + \frac{\partial w}{\partial z}\right)\](23)
Suku dalam kurung pada ruas kanan persamaan terakhir adalah persamaan kontinuitas yang dapat disubstitusi dengan Persamaan (18),
\[u\frac{\partial u}{\partial x} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z} = \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} + \frac{\partial u}{\partial z} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z} + v\frac{\partial u}{\partial z} + v\frac{\partial v}{\partial z} + v\frac{\partial v}{\partial z} + v\frac{\partial v}{\partial z} + v\frac{\partial v}{\partial z} + v\frac{\partial w}{\partial z} + v\frac{\partial w}{\partial z} + v\frac{\partial w}{\partial z} + v\frac{\partial w}{\partial z} + v\frac{\partial w}{\partial z}\] \[(24)\]
Substitusi sifat aliran tak berotasi pada ruas kanan persamaan, dimana
\[\frac{\partial u}{\partial y} = \frac{\partial v}{\partial x} + \frac{\partial u}{\partial z} = \frac{\partial w}{\partial x} \quad \text{dan } \frac{\partial v}{\partial z} = \frac{\partial w}{\partial y}\]
\[u\frac{\partial u}{\partial x} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z} = \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} + \frac{\partial u}{\partial t} + \frac{1}{2}\frac{\partial}{\partial x}(vv + ww) + \frac{u}{v}\left(\frac{\partial v}{\partial t} + \frac{1}{2}\frac{\partial}{\partial y}(uu + ww)\right) + \frac{u}{w}\left(\frac{\partial w}{\partial t} + \frac{1}{2}\frac{\partial}{\partial z}(uu + vv)\right)\] (25)
Substitusi persamaan terakhir kepersamaan momentum
\[\frac{\partial u}{\partial t} + \frac{1}{2} \left( \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} \right) + \frac{1}{4} \frac{\partial}{\partial x} (vv + ww) = - \frac{1}{2\rho} \frac{\partial p}{\partial x} - \frac{u}{2v} \left( \frac{\partial v}{\partial t} + \frac{1}{2} \frac{\partial}{\partial y} (vv + ww) \right) - \frac{u}{2w} \left( \frac{\partial w}{\partial t} + \frac{1}{2} \frac{\partial}{\partial z} (uu + vv) \right)\] (26)
Suku ke 2 dan ke 3 pada ruas kanan persamaan dapat disebut sebagai gaya penggerak hidrodinamik yang ditimbulkan oleh tekanan hidrodinamik akibat gerakan air, vaitu
\[-\frac{1}{2\rho}\frac{\partial p_{hd}}{\partial x} = -\frac{u}{2v}\left(\frac{\partial v}{\partial t} + \frac{1}{2}\frac{\partial}{\partial y}(vv + ww)\right)\]\[-\frac{u}{2w}\left(\frac{\partial w}{\partial t} + \frac{1}{2}\frac{\partial}{\partial z}(uu + vv)\right) \tag{27}\]
Sehingga persamaan momentum-x dapat ditulis menjadi,
\[\frac{\partial u}{\partial t} + \frac{1}{2} \left( \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} \right) + \frac{1}{4} \frac{\partial}{\partial x} (vv + ww) = -\frac{1}{2\rho} \frac{\partial p_{hs}}{\partial x} - \frac{1}{2\rho} \frac{\partial p_{hd}}{\partial x}\]
dimana berdasarkan Dean (1984), \(\frac{1}{2} \frac{\partial p_{hs}}{\partial x} = g \frac{\partial \eta}{\partial x}\)
persamaan momentum-x menjadi
\[\frac{\partial u}{\partial t} + \frac{1}{2} \left( \frac{\partial uu}{\partial x} + \frac{\partial uv}{\partial y} + \frac{\partial uw}{\partial z} \right) + \frac{1}{4} \frac{\partial}{\partial x} (vv + ww) =\] \[-\frac{g}{2} \frac{\partial \eta}{\partial x} - \frac{1}{2\rho} \frac{\partial p_{hd}}{\partial x} \tag{28}\]
Penyelesaian pesamaan gaya hidrodinamik seperti pada Persamaan (27), cukup sulit, sehingga perlu dicari persamaan pendekatan dari persamaan gaya hidrodinamik.
4.1 Perumusan persamaan tekanan hidrodinamik
Persamaan tekanan hidrodinamik akan dirumuskan dengan menggunakan persamaan kontinuitas fluida beraselerasi, yaitu Persamaan (18). Persamaan tersebut dintegrasikan terhadap kedalaman.
\[\frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} + \frac{\partial w}{\partial z} = -\left(\frac{\partial u}{\partial t} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z}\right)\frac{1}{u}\] \[-\left(\frac{\partial v}{\partial t} + u\frac{\partial v}{\partial x} + w\frac{\partial v}{\partial z}\right)\frac{1}{v} - \left(\frac{\partial w}{\partial t} + u\frac{\partial w}{\partial x} + v\frac{\partial w}{\partial y}\right)\frac{1}{w}\] (29)
\[\int_{z}^{\eta} \frac{\partial u}{\partial x} dz + \int_{z}^{\eta} \frac{\partial v}{\partial y} dz + w_{\eta} - w =\] \[- \int_{z}^{\eta} \frac{1}{u} \left( \frac{\partial u}{\partial t} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} \right) dz\] \[- \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + w \frac{\partial v}{\partial z} \right) dz\] \[- \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz\] \[(30)\]
Dimana w adalah kecepatan vertikal pada suatu posisi kedalaman z, wn adalah kecepatan vertikal pada permukaan air. Persamaan ini dapat ditulis menjadi persamaan untuk w dan diturunkan terhadap waktu t, serta ruas kiri dan ruas kanan persamaan ditambah dengan \[u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z}\] \[\frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z} = \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{\partial u}{\partial x} dz + \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{\partial v}{\partial y} + \frac{\partial w_{\eta}}{\partial t}\] \[+ \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{u} \left( \frac{\partial u}{\partial t} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} \right) dz\] \[+ \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + w \frac{\partial v}{\partial z} \right) dz\] \[+ \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz\] \[+ u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} + w \frac{\partial w}{\partial z}\] (31)
Persaman (31) adalah persamaan momentum-z, dimana ruas kiri persamaan adalah percepatan, sehingga ruas kanan persamaan seharusnya merupakan gaya penggerak, yaitu
\[-\frac{1}{\rho}\frac{\partial p}{\partial z} = \frac{\partial}{\partial t}\int_{z}^{\eta}\frac{\partial u}{\partial x}dz + \frac{\partial}{\partial t}\int_{z}^{\eta}\frac{\partial v}{\partial y}dz + \frac{\partial w_{\eta}}{\partial t}\] \[+\frac{\partial}{\partial t}\int_{z}^{\eta}\frac{1}{u}\left(\frac{\partial u}{\partial t} + v\frac{\partial u}{\partial y} + w\frac{\partial u}{\partial z}\right)dz\] \[+\frac{\partial}{\partial t}\int_{z}^{\eta}\frac{1}{v}\left(\frac{\partial v}{\partial t} + u\frac{\partial v}{\partial x} + w\frac{\partial v}{\partial z}\right)dz\] \[+\frac{\partial}{\partial t}\int_{z}^{\eta}\frac{1}{v}\left(\frac{\partial w}{\partial t} + u\frac{\partial w}{\partial x} + v\frac{\partial w}{\partial y}\right)dz\] \[+\left(u\frac{\partial w}{\partial x} + v\frac{\partial w}{\partial y} + w\frac{\partial w}{\partial z}\right)\] (32)
Mengingat persamaan diturunkan berdasarkan kecepatan air saja maka gaya penggerak pada persamaan tersebut adalah gaya penggerak hidrodinamis. Tekanan hidrodinamis dapat diperoleh dengan mengintegrasikan Persamaan (32) tersebut terhadap kedalaman, dan dengan mengerjakan syarat batas dinamik permukaan yaitu \(p_{\eta}=0\), serta dengan mengerjakan sifat fluida tak berotasi pada suku terakhir pada ruas kanan persamaan
\[\frac{p_{hd}}{\rho} = \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{\partial u}{\partial x} dz \right) dz + \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{\partial v}{\partial y} \right) dz + \frac{\partial w_{\eta}}{\partial t} (\eta - z) + \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{u} \left( \frac{\partial u}{\partial t} + v \frac{\partial u}{\partial y} + w \frac{\partial u}{\partial z} \right) dz \right) dz + \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial v}{\partial t} + u \frac{\partial v}{\partial x} + w \frac{\partial v}{\partial z} \right) dz \right) dz + \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{v} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz \right) dz + \int_{z}^{\eta} \left( \frac{\partial}{\partial t} \int_{z}^{\eta} \frac{1}{w} \left( \frac{\partial w}{\partial t} + u \frac{\partial w}{\partial x} + v \frac{\partial w}{\partial y} \right) dz \right) dz + \frac{1}{2} \left( \left( u_{\eta}^{2} + v_{\eta}^{2} + w_{\eta}^{2} \right) - \left( u^{2} + v^{2} + w^{2} \right) \right) \quad (33)\]
\(u_{\eta}\), \(v_{\eta}\) dan \(w_{\eta}\) adalah kecepatan partikel pada permukaan pada arah sumbu x, y dan z secara berurutan. Substitusi Persamaan (33) ke persamaan momentum—x (Persamaan (28)) dengan \(p = p_{hs} + p_{hd}\) dan dikerjakan pada \(z = \eta\),
\[\begin{split} &\frac{\partial u_{\eta}}{\partial t} + \frac{1}{4} \frac{\partial}{\partial x} \left( 2u_{\eta}^{2} + v_{\eta}^{2} + w_{\eta}^{2} \right) + \frac{1}{4} \frac{\partial u_{\eta} v_{\eta}}{\partial y} = -\frac{g}{2} \frac{\partial \eta}{\partial x} \\ &- \frac{1}{2} \frac{\partial w_{\eta}}{\partial t} \frac{\partial \eta}{\partial x} \end{split} \tag{34}\]
Dengan cara yang sama dapat diperoleh persamaan momentum- permukaan pada arah-y yaitu,
\[\frac{\partial v_{\eta}}{\partial t} + \frac{1}{4} \frac{\partial u_{\eta} v_{\eta}}{\partial x} + \frac{1}{4} \frac{\partial}{\partial y} \left( u_{\eta}^{2} + 2v_{\eta}^{2} + w_{\eta}^{2} \right) = -\frac{g}{2} \frac{\partial \eta}{\partial y} - \frac{1}{2} \frac{\partial w_{\eta}}{\partial t} \frac{\partial \eta}{\partial y}\] (35)
Persamaan momentum-c tidak diperlukan karena kecepatan vertikal \(w_{\eta}\) dapat dihitung dengan prosedur lain yang akan dibahas pada bagian lain.
5. Integrasi persamaan kontinuitas
Persamaan elevasi muka air η diperoleh dengan mengintegrasikan persamaan kontinuitas terhadap kedalaman, sebagaimana halnya perumusan persamaan gelombang panjang Airy. Persamaan kontinuitas yang digunakan adalah Persamaan (8) yaitu persamaan kontinuitas tanpa memperhitungkan percepatan lokal, hal ini mengingat integrasi Persamaan (18) terhadap kedalaman cukup sulit untuk dilakukan. Penggunaan persamaan kontinuitas Persamaan (8), berakibat bahwa pada pemodelan numeris harus digunakan pertambahan waktu \(\delta t\) yang sangat kecil untuk menjaga agar pada selang waktu tersebut pengaruh percepatan lokal sangat kecil sehingga dapat diabaikan. Integrasi persamaan kontinuitas terhadap kedalaman dengan menggunakan kecepatan rata-rata kedalaman. Sebagai kecepatan rata-rata kedalaman adalah kecepatan pada suatu posisi vertikal \(z = z_0\)
\[U = u(z_0) \; ; \; V = v(z_0)\] (36)
Berdasarkan Hutahaean (2008), untuk gelombang yang bergerak pada arah-\(\xi\)
\[\phi = Ge^{kh}\beta(z)\cos k\xi\sin \sigma t\] \[\beta(z) = \alpha e^{k(h+z)} + e^{-k(h+z)}\beta_1(z) = \alpha e^{k(h+z)} - e^{-k(h+z)}\] (38)
\[\alpha = \frac{1}{2} \left( \frac{1 + \frac{\partial h}{\partial \xi}}{1 - \frac{\partial h}{\partial \xi}} + \frac{1 - \frac{\partial h}{\partial \xi}}{1 + \frac{\partial h}{\partial \xi}} \right)\](39)
Dimana G = konstanta, k = bilangan gelombang.
\[\sigma = \frac{2\pi}{T}\] T = perioda gelombang, \(\frac{\partial h}{\partial \xi}\) = kemiringan
batimetri pada arah gelombang bergerak. Dengan menggunakan potensial aliran tersebut, maka kecepatan partikel pada arah horisontal adalah
\[u_{\xi} = -\frac{\partial \phi}{\partial \xi} = -\frac{\partial}{\partial \xi} \left( G e^{kh} \cos k \xi \right) \beta(z) \sin \sigma t \quad (40)\]
Didefinisikan kecepatan rata-rata kedalaman adalah
\[U_{\xi} = \frac{1}{\beta_u H} \int_{-h}^{\eta} u_{\xi} \ dz \tag{41}\]
dimana (lihat Gambar 2), h = kedalaman perairan terhadap muka air diam
η = elevasi muka air akibat gelombang terhadap muka air diam
\[H = h + \eta\]
Dimana β<sub>u</sub> disebut sebagai koefisien integrasi. Dengan menggunakan sebagai kecepatan rata-rata kedalaman adalah kecepatan pada posisi \(z = z_0\) maka
\[U_{\xi} = u_{\xi}(z_0) = -\frac{\partial}{\partial x} \left( G e^{kh} \cos k \xi \right) \beta(z_0) \sin \sigma t\] \[\frac{u_{\xi}}{U_{\xi}} = \frac{\beta(z)}{\beta(z_0)} \text{ atau } u_{\xi} = \frac{\beta(z)}{\beta(z_0)} U_{\xi}\]
\[\beta_{u} = \frac{1}{U_{\xi}H} \int_{-h}^{\eta} u dz = \frac{1}{U_{\xi}H} \int_{-h}^{\eta} \frac{\beta(z)}{\beta(z_{0})} dz\] \[\beta_{u} = \frac{\beta_{1}(\eta) - (\alpha - 1)}{kH\beta(z_{0})}\] (42)
Mengingat distribusi kecepatan pada arah sumbu vertikal-z adalah sama, baik untuk ug maupun untuk kecepatan horisontal pada arah sumbu- x dan sumbuy, Persamaan (42) ini berlaku juga untuk kecepatan horisontal pada arah x dan arah y yaitu u dan v.
Relasi antara kecepatan rata-rata kedalaman dengan kecepatan pada posisi z, dapat dihitung dengan persamaan \[u_{\xi}(z) = \frac{\beta(z)}{\beta(z_0)} U_{\xi}\] dimana persamaan
dimana persamaan ini juga berlaku untuk kecepatan horisontal pada arah- x dan arah-y,
\[u(z) = \frac{\beta(z)}{\beta(z_0)}U \qquad v(z) = \frac{\beta(z)}{\beta(z_0)}V \tag{43}\]
Persamaan (43) ini digunakan untuk menghitung kecepatan rata-rata kedalaman dari kecepatan permukaan \(u_{\eta}\) dan \(v_{\eta}\) yang dihitung dari persamaan momentum, Persamaan (34) dan (35).
Dengan menggunakan definisi kecepatan rata-rata kedalaman dan koefisien integrasi tersebut, persamaan kontinuitas diintegrasikan terhadap kedalaman. Integrasi dilakukan sebagaiman halnya integrasi persamaan kontinuitas pada gelombang panjang Airy dengan mengerjakan aturan Leibniz dan syarat batas kinematik permukaan dan dasar perairan dengan hasil integrasi adalah sebagai berikut.
\[\frac{\partial \eta}{\partial t} = -\frac{\partial \beta_u H U}{\partial x} - \frac{\partial \beta_v H V}{\partial y} \tag{44}\]
Sedangkan persamaan momentum-x dan momentum-v tetap berbentuk seperti pada Persamaan (34) dan (35).
6. Persamaan untuk menghitung kecepatan vertikal permukaan w<sub>n</sub>
Perhitungan \(w_{\eta}\) dan \(\frac{\partial w_{\eta}}{\partial x}\) dapat dilakukan dengan menghitung \(w_{\eta}\) dengan menggunakan syarat batas
nematik permukaan selanjutnya \(\frac{\partial w_{\eta}}{\partial x}\) dihitung secara
numeris. Tetapi akan lebih mudah bila dilakukan perhitungan dengan menggunakan potensial aliran gelombang nonlinier, Persamaan (37).
Gambar 2. Sketsa muka air akibat gelombang
Substitusi \(G = \frac{\sigma A}{F}\), dimana A adalah amplitudo
gelombang, sedangkan F dinyatakan pada Persamaan (45), pada persamaan potensial aliran,
\[\phi = \frac{\sigma A}{F} \beta(z) \cos k \xi \sin \sigma t\]
dimana berdasarkan Hutahaean (2010), integrasi persamaan syarat batas kinematik permukaan dengan ketelitian \(O(\delta^0)\) akan menghasilkan
\[F = k\beta(\eta) + \left(1 - \frac{\partial h/\partial \xi}{\partial h}\right) k\beta_1(\eta) \frac{\partial \eta}{\partial \xi}\] (45)
Dengan persamaan muka air \(\eta = A\cos k \xi \cos \sigma t\), persamaan potensial aliran dapat ditulis menjadi
\[\phi = -\frac{1}{F}\beta(z)\frac{\partial \eta}{\partial t} \tag{46}\]
Kecepatan vertikal w, \(w = -\frac{\partial \phi}{\partial z} = \frac{k}{F} \beta_1(z) \frac{\partial \eta}{\partial t}\)
\[w_{\eta} = \frac{k}{F} \beta_{1}(\eta) \frac{\partial \eta}{\partial t} \tag{47}\]
\[\frac{\partial w_{\eta}}{\partial t} = \frac{k^2}{F} \beta(\eta) \left( \frac{\partial \eta}{\partial t} \right)^2 + \frac{k}{F} \beta_1(\eta) \frac{\partial^2 \eta}{\partial t^2} - \frac{k}{F^2} \frac{\partial F}{\partial t} \beta_1(\eta) \frac{\partial \eta}{\partial t} \tag{48}\]
\(\partial \eta/\partial t\) pada Persaman (47) dan (48) adalah hasil perhitungan persamaan kontinuitas, dari Persamaan (44).
Persamaan kontinuitas, Persamaan (44) dan persaman momentum-x dan momentum-y, Persamaan (34) dan (35) diselesaikan secara numeris dengan menggunakan metoda selisih hingga untuk diferensial ruang dengan ukuran grid ±1/40 panjang gelombang, sedangkan diferensial waktu diselesaikan dengan metoda prediktor-korektor berbasis integrasi numeris dari Newton-Cote, Hutahaean (2007) dan (2008b), dengan langkah waktu 1/30 perioda gelombang
7. Hasil Model
Pada eksekusi model, model diberi input gelombang dengan profil gelombang sinusoidal progresif seperti yang diperlihatkan pada Gambar 3.
a. Pada perairan dalam
Model dikerjakan pada perairan dengan kedalaman konstan sebesar 20 m. Input gelombang yang
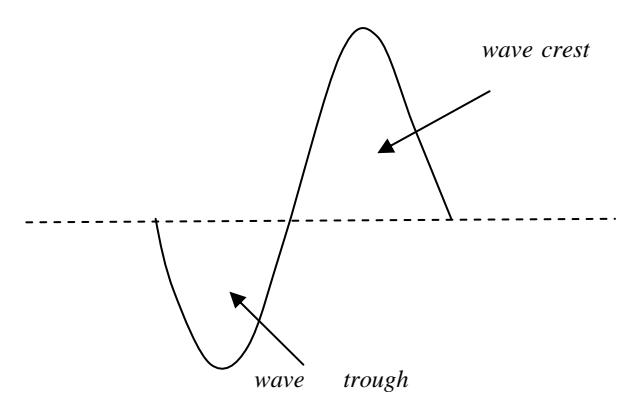
Gambar 3. Profil gelombang sinusoidal
digunakan adalah gelombang sinusoidal tunggal progresif dengan perioda 6 detik, amplitudo 0.80 m.
Seperti terlihat pada Gambar 4, mula-mula profil gelombang masih berbentuk sinusoidal dengan bagian trough dan crest masih seimbang. Tetapi setelah menempuh jarak 150 m, bagian trough mengalami pembesaran amplitudo, sedangkan bagian crest mengalami pengurangan amplitudo. Selanjutnya setelah menempuh jarak kurang lebih 250 m, baik bagian crest maupun bagian trough mengalami pengurangan amplitudo tetapi amplitudo lembah masih lebih besar. Fenomena dimana amplitudo lembah lebih besar dari amplitudo puncak menyebabkan penurunan elevasi muka air rata-rata, fenomena ini disebut dengan wave setdown. Pengurangan amplitudo crest dan trough dikarenakan peristiwa dispersi, dimana pelepasan energi gelombang akibat dispersi ini adalah munculnya gelombang-gelombang dibelakang gelombang utama. Jadi pada pengujian ini terdapat fenomena wave setdown dan dispersi.
profil gelombang mula-mula
profil gelombang setelah menempuh jarak 150m
Gambar 4. Hasil model pada kedalaman 20 m
b. Pada perairan dangkal
Pengujian berikutnya, model dikerjakan pada perairan dangkal dengan kedalaman konstan sebesar 5.0 m dengan input gelombang dengan perioda 6 detik dan amplitudo 0.80 m.
Seperti pada hasil sebelumnya, mula-mula gelombang berprofil sinusoidal sempurna, dimana terdapat keseimbangan antara amplitudo bagian trough dengan bagian crest, begitu juga dengan peristiwa dispersi terlihat terjadi pengurangan pada amplitudo bagian trough maupun bagian crest. Perbedaannya adalah pada kedalaman 5 m ini amplitudo bagian crest lebih besar daripada amplitudo bagian trough, hal ini menyebabkan elevasi muka air rata-rata mengalami kenaikan atau dikenal dengan peristiwa wave setup.
c. Pada perairan sangat dangkal
Pada bagian ini model dengan input gelombang yang sama dikerjakan pada perairan yang sangat dangkal dan konstan yaitu sedalam 2.0 m.
Pada kedalaman 2.0 m ini wave setup langsung terjadi pada eksekusi satu perioda gelombang walaupun masih berbentuk sinusoidal sempurna sedangkan pada bagian crest gelombang juga langsung mengalami pengurangan amplitudo, tidak lagi 0.80 m. Selain terjadi perisitiwa wave setup dan dispersi, terlihat bahwa bagian trough gelombang semakin menghilang dan setelah menempuh jarak 300.0 m profil gelombang menjadi berbentuk cnoidal yang hampir sempurna. Jadi pada perairan yang sangat dangkal, berdasarkan model ini gelombang sinusoidal berdeformasi menjadi gelombang cnoidal.
d. Pada kedalaman berubah
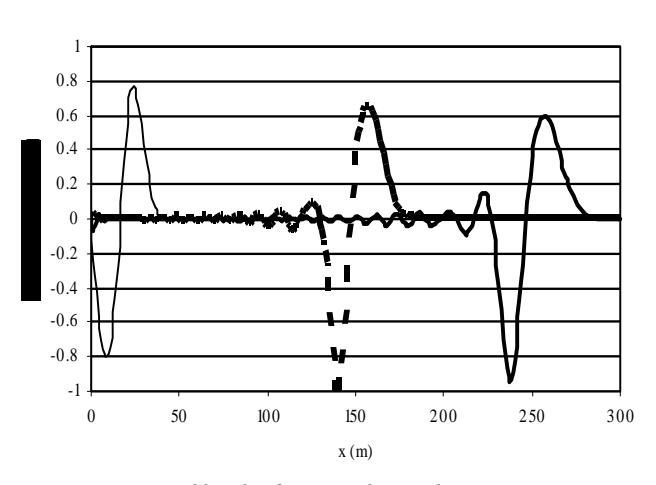
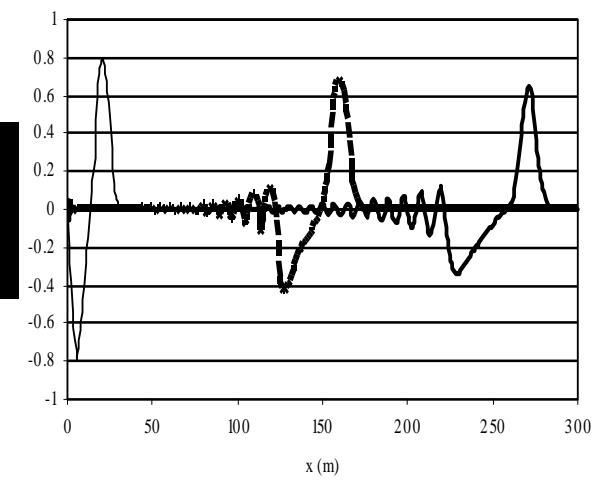
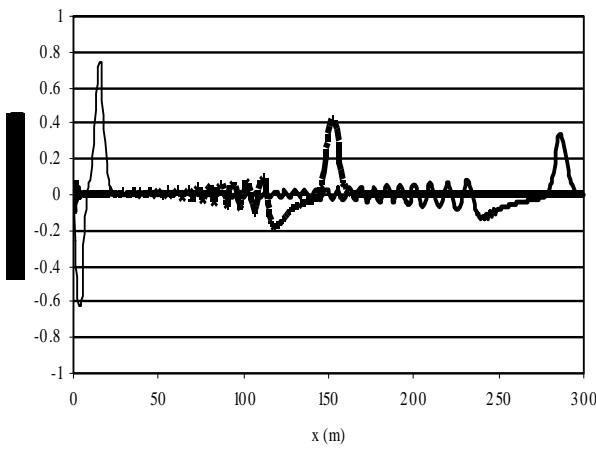
Pada bagian ini model dikerjakan pada kedalaman berubah, dimana kedalaman mula-mula adalah 5.0 m, pada jarak 150.0 m kedalaman menjadi 1.0 m selanjutnya adalah konstan sedalam 1.0 m, seperti disajikan pada Gambar 7. Input gelombang yang digunakan adalah gelombang sinusoidal dengan perioda 6 detik dan dengan amplitudo 0.60 m, hal ini dimaksudkan agar terlihat terjadinya shoaling.
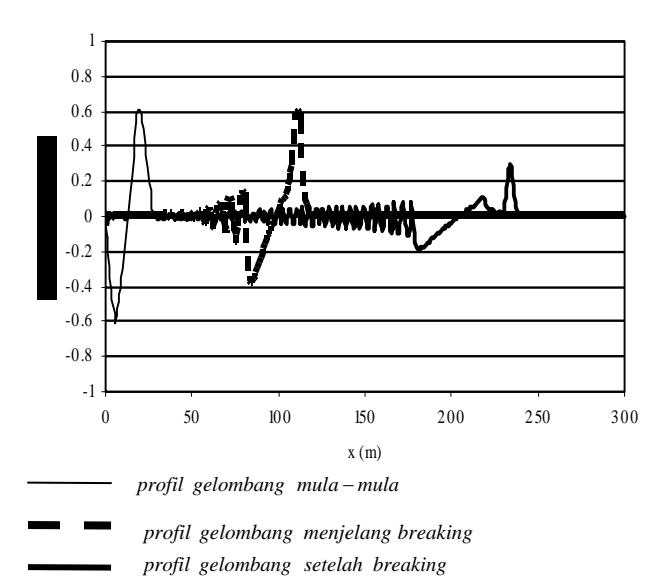
Hasil model seperti diperlihatkan pada Gambar (8), mula-mula profil gelombang berbentuk sinusoidal sempurna. Selanjutnya pada jarak kurang lebih 100 m, atau pada kedalaman 2.40 m, terlihat fenomena wave setup dan sedikit shoaling. Kecilnya shoaling ini dikarenakan digunakan gelombang pendek (perioda gelombang 6 detik) dan juga akibat peristiwa dispersi. Bila digunakan gelombang dengan perioda 9 detik, terjadinya shoaling terlihat dengan jelas. Pada jarak kurang lebih 250 m, dimana kedalaman perairan adalah konstan sebesar 1.0 m dimulai pada jarak 150
m, amplitudo bagian puncak berkurang sangat besar yaitu menjadi 0.30 m, dimana bagian trough memisah dengan bagian crest sehingga terbentuk profil gelombang cnoidal. Berkurangnya amplitudo gelombang ini menunjukkan terjadinya breaking pada jarak antara 100 m- 250 m.
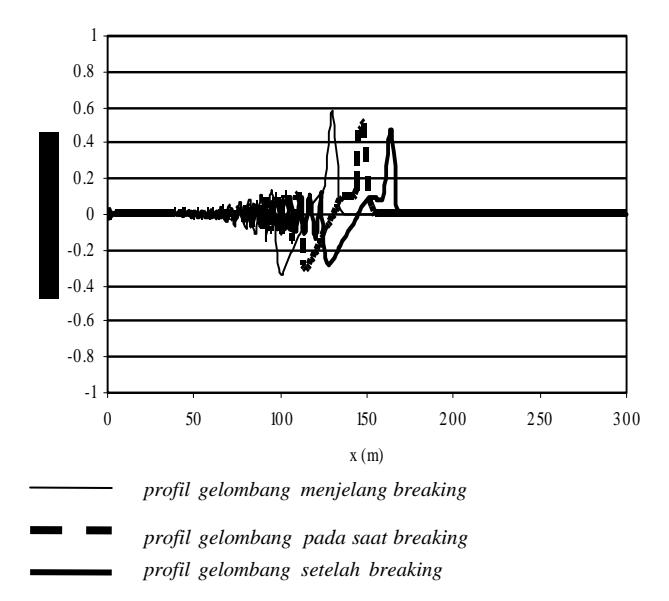
Pada Gambar (9) diperlihatkan profil gelombang pada jarak antara 125 m – 175 m. Pada gambar tersebut terlihat bahwa terjadi penurunan amplitudo crest gelombang secara terus menerus dengan pengurangan yang cukup besar. Dari hal ini dapat dikatakan bahwa breaking mulai terjadi pada kedalaman 1.7 m.
profil gelombang mula mula
profil gelombang setelah menempuh jarak 150m profil gelombang setelah menempuh jarak 250m
Gambar 5. Hasil model pada kedalaman 5 m
profil gelombang mula mula
profil gelombang setelah menempuh jarak 150m
profil gelombang setelah menempuh jarak 300m
Gambar 6. Hasil model pada kedalaman 2.0 m
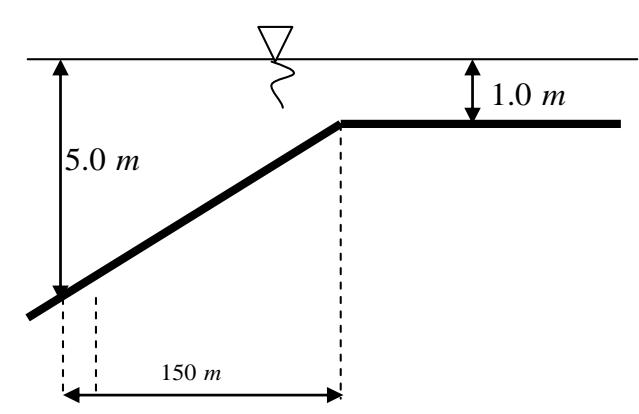
Gambar 7. Profil kedalaman untuk pemodelan breaking
Gambar 8. Hasil model pada kedalaman berubah
Gambar 9. Proses breaking pada model
Penelitian ini hanya bertujuan untuk mendapatkan sifat kualitatif dari persamaan yang diperoleh dan tidak dilakukan penelitian secara kuantitatif yaitu penelitian terhadap hasil laboratorium. Penelitian secara kuantitatif akan disajikan pada paper berikutnya.
8. Kesimpulan
- 1. Dari hasil pengujian model yang telah dilakukan, maka dapat disimpulkan bahwa pengerjaan persamaan kontinuitas fluida berakselerasi dapat memodelkan berbagai fenomena yang telah banyak dikenal yang terdapat pada gelombang progresif. Fenomena tersebut antara lain adalah
- a. Wave setdown, penurunan muka air rata-rata pada perairan dalam akibat gelombang.
- b. Wave setup, kenaikan muka air rata-rata pada perairan dangkal akibat gelombang, dimana perisitiwa wave setup ini pada perairan yang sangat dangkal menyebabkan gelombang sinusoidal berdeformasi menjadi gelombang cnoidal.
- c. Wave breaking, pada kedalaman tertentu gelombang akan mengalami pecah.
- 2. Dengan demikian model yang dikembangkan dapat mensimulasikan dinamika gelombang di perairan dangkal dengan baik, sehingga dapat digunakan untuk pemodelan gelombang didaerah surfzone untuk keperluan perencanaan bangunan pantai. Penelitian lebih lanjut yang perlu dilakukan adalah pengkajian hasil model terhadap hasil-hasil laboratorium.