
Abstrak
Makalah membahas penerapan perpindahan campuran Euler-Lagrange dalam analisis nonlinier geometri sistem struktur, dalam mana perpindahan dan deformasi diamati dari konfigurasi referensi yang dipilih, yaitu konfigurasi yang pernah dilalui oleh sistem selama proses pembebanan. Perpindahan yang diukur dari konfigurasi awal ke konfigurasi referensi dinamakan perpindahan Euler, dan perpindahan yang diukur dari konfigurasi referensi ke konfigurasi akhir dinamakan perpindahan Lagrange. Nonlinieritas geometri sistem struktur terjadi dalam kasus di mana perpindahan terutama mencakup perpindahan badan kaku, dalam mana pemilihan konfigurasi referensi menjadi suatu langkah penting. Deformasi yang sama dapat diamati berlainan seturut dengan pilihan konfigurasi referensi. Analisis sitem kontinu didekati dengan langkah inkremental berturutan dalam mana beban total dibagi atas beberapa beban inkremental. Proses kemudian dilinierisasi dan matriks kekakuan global inkremental digunakan pada setiap langkah iterasi. Perpindahan campuran yang diusulkan dituangkan dalam program paket komputer yang dituliskan dalam bahasa Fortran. Program diterapkan dalam analisis beberapa sistem struktur, dalam mana perpindahan Lagrange konvensional tidak cukup untuk memodelkan perpindahan dalam analisis.
Kata – kata Kunci: Perpindahan finitesimal, nonlinier geometri, metoda elemen hingga, analisis inkremental berturutan.
1. Introduction
In the analysis of solid structural systems, engineering mechanics is applied using a referential configuration from which displacement and deformation as well as reaction forces are observed. One may choose initial configuration as referential configuration; in this case, Lagrangian description is applied. Current configuration may also be chosen as referential configuration; in this case, Eulerian description is applied. Eulerian and Lagrangian descriptions are described in several references (Fung, 1965; Malvern, 1969).
In analysis of infinitesimal displacement, the choice of referential configuration is of no concern, since for this case, the two descriptions produce practically the same
results. But this is not the case in finitesimal displacement. The same displacement field produces different deformations if observed from initial or current configuration.
As an example, consider a prismatic bar with L = 100cm in initial length. If the bar is stretched so as to obtain 101cm in final length, then the strain according to Eulerian description becomes ɛ = (101-100)/101 = 0.0099, and according to Lagrangian description becomes ɛ = (101-100)/101 = 0.0100, and the two values are practically identical. But if the bar is stretched so as to obtain 150cm in final length, then the strain according to Eulerian description becomes ɛ = (150-100)/150 = 0.3333; and according to Lagrangian description becomes ɛ = (150-100)/100 = 0.500. The two descriptions result in quite different values of
Vol. 24 No. 2 Agustus 2017 109
strain for the same deformation. This example clearly demonstrates that in case of finite displacement, it should be clearly stated from which both displacement and deformation are viewed.
2. Decomposition of Displacement Field
In addition to what has been described previously, it should be explained several additional informations. First, in Lagrangian approach, the material and the node (in finite element model) undergo the same displacement. Another words, the node and the pertaining material always be connected at all loading stages. However, one may be confronted with the problems that the node and pertaining material may undergo different displacement during loading progress. Example for this case, among others, are steel raw material slipping into the mold in hot-rolled process; cable slips around pulley; slip between interface of two bodies; and so forth.
Figure 1 depicts a structural system consisting a pulley resting on a cable. The loading causess slip of pulley along the periphery of pulley, and then the cable and the pulley together undergo additional vertical and horizontal displacements. The slip between the pulley and the cable (point 1 and 1') may be represented as Eulerian displacement, and the additional displacement as Lagrangian displacement.
As another example, Figure 2 depicts a structural system consisting of soft layer resting on hard layer and a rigid bar is indented upon the soft layer. Loading in this case causes uniform vertical displacements in nodes on upper boundary of soft layer. If the interface between beam and soft layer is frictionless, there will exist slip between the two bodies. Portion 1-2-3-4 of soft layer will undergo to location 1-2-3'-4'. The lower face of beam connects with different soft layer materials from time to time. This slip may be best modeled by
Through these examples, a necessity to decompose displacement into Eulerian and Lagrangian components, arises. Generally, a configuration once occupied by structural materials may be chosen as referential configuration. The decomposition of the displacement into Eulerian and Lagrangian portions is described in the following chapter.
3. Eulerian – Lagrangian Description
The decomposition of displacement is desribed by showing displacement model in Figure 3. A typical material point in the structural system at time t occupies initial configuration V' at location \(\widetilde{X}\). After loading, the material point eventually occupies current configuration v' at location \(\widetilde{X}\). A configuration, which may be occupied by structural system at a using Eulerian displacement.
particular time within loading process is chosen as referential configuration and denoted by \(v^r\). The displacement of a typical material point initially occupied location at \(\widetilde{\chi}\), is denoted by \(\widetilde{q}\) and this displacement decomposed into Eulerian displacement \(\widetilde{w}\) and Lagrangian displacement \(\widetilde{u}\),
\[\widetilde{q} = \widetilde{x} - \widetilde{X} = (\widetilde{x} - \widetilde{x}^r) + (\widetilde{x}^r - \widetilde{X}) = \widetilde{u} + \widetilde{w}\] (1)
Deformation may be observed by inspecting elongation experienced by a typical line segment dSthat mapped into ds, such that
\[(ds)^{2} - (dS)^{2} = 2d\widetilde{x} \cdot L \cdot d\widetilde{x}\] (2)
following Euler description, and
\[(ds)^{2} - (dS)^{2} = 2d\widetilde{X} \cdot E \cdot d\widetilde{X}\] (3)
according to Lagrange description. The entity E is Green strain tensor given by
Figure 1. Cable and pulley
Figure 2. Rigid beam indented on soft layer
Figure 3. Mixed Eulerian and Lagrangian displacement
\[E_{ij} = \frac{1}{2} \left[ \frac{\partial x_k}{\partial X_i} \frac{\partial x_k}{\partial X_j} - \delta_{ij} \right]\] (4)
and L is Almansi strain tensor given by
\[L_{ij} = \frac{1}{2} \left[ \delta_{ij} - \frac{\partial X_k}{\partial x_i} \frac{\partial X_k}{\partial x_j} \right]\] (5)
in which Einstein summation rule applies, i.e., summation is to be carried out for repeated index. The Green strain tensor gives Piola-Kirchoff stress tensor, while Almansi strain tensor gives Cauchy stress tensor (Gantmacher, 1975, Hariandja, 1985, Malvern, 1969). The displacement gradient may be expressed in term of Jacobian
\[\frac{\partial x_i}{\partial X_j} = J_{ij} = \frac{\partial x_i}{\partial x_k^r} \frac{\partial x_k^r}{\partial X_j} = \hat{J}_{ik} \bar{J}_{kj}\] (6)
in which \(\hat{J}_{ik}\) is Lagrangian Jacobian and \(\bar{J}_{kj}\) is Eulerian Jacobian given by
\[\hat{J}_{ik} = \frac{\partial x_i}{\partial x_k^r}; \quad \bar{J}_{kj} = \frac{\partial x_k^r}{\partial X_j}\] (7)
Since the formulations are arranged in terms of referential parameter \(\tilde{x}^r\), then partial derivatives with respect to \(\tilde{x}\) need to be transformed into partial derivatives with respect to \(\tilde{x}^r\). First, it is written that
\[\frac{\partial \cdot}{\partial x_i^r} = \frac{\partial X_k}{\partial x_i^r} \frac{\partial \cdot}{\partial X_k} = m_{ki} \frac{\partial \cdot}{\partial X_k}\] (8)
which, upon inversion gives
\[\frac{\partial \cdot}{\partial X_i} = \overline{m}_{ik} \frac{\partial \cdot}{\partial x_i^r} \tag{9}\] in which \(\overline{m}_{ik}\) is the element of inverted matrix of the matrix formed by \(m_{ki}\). Further, partial derivatives with respect to \(\widetilde{x}^r\) may be inverted to partial derivatives with respect to parametric coordinates \(\widetilde{\xi}\) by writing
\[\frac{\partial \cdot}{\partial \xi_i} = \frac{\partial \cdot}{\partial x_k^r} \frac{\partial x_k^r}{\partial \xi_i} = n_{ki} \frac{\partial \cdot}{\partial x_k^r}\] (10)
which, upon inversion gives
\[\frac{\partial \cdot}{\partial x_i^r} = \overline{n}_{ik} \frac{\partial \cdot}{\partial \xi_k} \tag{11}\] in which \(\overline{n}_{ik}\) is the element of inverted matrix of the matrix formed by \(n_{ki}\). Therefore, the following may be obtained.
\[\frac{\partial \cdot}{\partial X_{i}} = \overline{m}_{ik} \frac{\partial \cdot}{\partial x_{k}^{r}} = \overline{m}_{ik} \overline{n}_{kj} \frac{\partial \cdot}{\partial \xi_{i}} = \overline{r}_{ij} \frac{\partial \cdot}{\partial \xi_{i}}; \quad \overline{r}_{ij} = \overline{m}_{ik} \overline{n}_{kj}\] (12)
4. Incrementation and Linearization Technique
It may be observed from the form of Equations 4 and 5 that the governing equilibrium equation is quadratic in terms of displacement components. Therefore, the problem would be geometrically nonlinear. The governing equilibrium equation may be expanded in terms of displacement components and the expression may be approximated by retaining linear terms. In this case, successive iteration scheme is applied.
The following is incrementation process of terms. First, at time t, the displacement is decomposed in Eulerian and Lagrangian displacement
\[\widetilde{q}^{t} = \widetilde{x}^{t} - \widetilde{X}^{t} = (\widetilde{x}^{t} - \widetilde{x}^{r}) + (\widetilde{x}^{r} - \widetilde{X}^{t}) = \widetilde{u}^{t} + \widetilde{w}^{t}\] (13)
Strain component is given by
\[E_{ij}^{t} = \frac{1}{2} \left[ J_{ki}^{t} J_{kj}^{t} - \delta_{ij} \right] \tag{14}\]
For time \(t + \Delta t\), displacement is given by
\[\widetilde{q}^{t+\Delta t} = \widetilde{q}^t + \widetilde{q} = \widetilde{q}^t + \widetilde{u} + \widetilde{w} \tag{15}\] in which \(\widetilde{q}\) is incremental displacement consisting Lagrangian incremental displacement \(\widetilde{u}\) and Eulerian incremental displacement \(\widetilde{w}\). Correspondingly, total Jacobian components are incremented
\[J_{ij}^{t+\Delta t} = J_{ij}^t + \Delta J_{ij} \tag{16}\] in which incremental Jacobian components are given by
\[\Delta J_{ij} = \hat{J}_{im}^t \Delta \bar{J}_{mj} + \Delta \hat{J}_{im} \bar{J}_{mj}^t \tag{17}\] which may further be written in terms of Lagrangian and Eulerian incremental Jacobians. Strain components may also be incremented by writing
\[E_{ij}^{t+\Delta h} = E_{ij}^{t} + \Delta E_{ij} = \frac{1}{2} (J_{kl}^{t} J_{kj}^{t} - \delta_{ij}) + \Delta E_{ij}\] (18)
which results in
\[\Delta E_{ij} = \frac{1}{2} (J_{k}^{i} J_{kj} + J_{kl} J_{kj}^{i}) \tag{19}\]
Equation 19 may be written in matrix form
\[\{\Delta E\} = [B_1]\{\Delta J\}; \quad \{\Delta J\} = [B_2]\{\Delta \widetilde{J}\}; \quad \{\Delta \widetilde{J}\} = [B_3]\{\widetilde{u}\}\] (20)
in which \(\{\widetilde{u}\}\) is incremental displacement vector containing Eulerian and Lagrangian incremental displacements. Therefore, the following relationship is established.
\[\{\Delta E\} = [B]\{\widetilde{u}\}; \quad [B] = [B_1][B_2][B_3]\] (21)
In the following, equilibrium equation is written in incremental form. First, at time t, the equilibrium
condition reads
\[[K'][Q'] = \{P'\} \tag{22}\] in which
\[[K^t] = \frac{1}{2} \iiint_{V} [E^t]^T [C] [E^t] dv\] (23)
At time \(t + \Delta t\),
\[\left[K^{t+\Delta t}\right]\left[Q^{t+\Delta t}\right] = \left\{P^{t+\Delta t}\right\} \tag{24}\] which may be expanded in the following form,
\[[K^{t+\Delta t}][Q^t] + \{\Delta Q\} = \{P^t\} + \{\Delta P\}\] \[(25)\] which, in view of equilibrium condition in Equation 22, provides linearized form
\[\left[K^{t+\Delta t}\right]\left\{\Delta Q\right\} = \left\{\Delta P\right\} \tag{26}\] where
\[\left[K^{r+\Delta t}\right] = \iiint_{V} \left[B\right]^{T} \left[C\right] \left[B\right] dv \tag{27}\]
In the formulation of global element stiffness, the following relationship may be used,
\[dv = dx_1 dx_2 dx_3 = \overline{m} dx_1^r dx_2^r dx_3^r = \overline{r} d\xi_1 d\xi_2 d\xi_3\] (28)
In the following chapter, incremental matrix stiffness of several types of elements, in this case, four node isoparametric membrane and bar elements, are developed.
5. Finite Element Formulation
Due to the limitation on the space, only two types of elements are developed, i.e., four node isoparametric membrane and bar elements, considered in turn in the following.
5.1 Four node isoparametric membrane
A four node isoparametric membrane element is depicted in Figure 4. Each node contains four degrees of freedom, i.e., Eulerian and Lagrangian displacement components in \(\widetilde{x}^r\) coordinate. Therefore, the element has 16 degrees of freedom, arranged in the form
\[\begin{aligned} &\{\widetilde{u}^t\} = \left\{ u_{11}^t \ w_{11}^t \ u_{21}^t \ w_{21}^t \dots u_{14}^t \ w_{14}^t \ u_{24}^t \ w_{24}^t \right\} \\ &\{\widetilde{u}\} = \left\{ u_{11} \ w_{11} \ u_{21} \ w_{21} \dots u_{14} \ w_{14} \ u_{24} \ w_{24} \right\} \end{aligned} \tag{29}\] and displacement and nodal coordinates are interpolated by using shape functions,
\[\{u(\xi_1, \xi_2)\} = \sum_{i=1}^4 N_i(\xi_1, \xi_2) u_i\] (30)
\[\left\{x^{r}(\xi_{1}, \xi_{2})\right\} = \sum_{i=1}^{4} N_{i}(\xi_{1}, \xi_{2})x_{i}^{r}\] (31)
First, Lagrangian and Eulerian Jacobian components are obtained by applying Equation 7,
\[\hat{J}_{ij}^{t} = \delta_{ij} + \overline{n}_{jk} \partial \hat{u}_{i}^{t} / \partial \xi_{k}; \quad \overline{J}_{ij}^{t} = \delta_{ij} + \overline{r}_{jk} \partial \hat{u}_{i}^{t} / \partial \xi_{k}\] (32)
Figure 4. Four node isoparametric membrane element
The \([B_1]\) matrix then may be written in the form
\[[B_1] = \begin{bmatrix} J_{11}^t & 0 & J_{21}^t & 0 \\ 0 & J_{12}^t & 0 & J_{22}^t \\ J_{12}^t / 2 & J_{11}^t / 2 & J_{22}^t / 2 & J_{21}^t / 2 \end{bmatrix}\](33)
\([B_2]\) matrix in the form
\[[B_{2}] = \begin{bmatrix} \overline{J}_{11}^{t} & \hat{J}_{11}^{t} & 0 & 0 & \overline{J}_{21}^{t} & \hat{J}_{21}^{t} & 0 & 0\\ \overline{J}_{12}^{t} & 0 & 0 & \hat{J}_{11}^{t} & \overline{J}_{22}^{t} & 0 & 0 & \hat{J}_{21}^{t}\\ 0 & \hat{J}_{12}^{t} & \overline{J}_{11}^{t} & 0 & 0 & \hat{J}_{22}^{t} & \overline{J}_{21}^{t} & 0\\ 0 & 0 & \overline{J}_{12}^{t} & \hat{J}_{12}^{t} & 0 & 0 & \overline{J}_{22}^{t} & \hat{J}_{22}^{t} \end{bmatrix}\] \[(34)\] and \([B_3]\) matrix in the form
\[\text{[rumus tidak dapat ditampilkan dengan baik — lihat PDF asli]}\] in which
\[N_{i}(\xi_{1}, \xi_{2}) = \frac{1}{4} (1 + \overline{\xi}_{1i} \xi_{1}) (1 + \overline{\xi}_{2i} \xi_{2}); \quad i = 1,4\] (36)
in which
\[a_{i} = \overline{m}_{11} \partial N_{i} / \partial \xi_{1} + \overline{m}_{12} \partial N_{i} / \partial \xi_{2}\] \[b_{i} = \overline{r}_{11} \partial N_{i} / \partial \xi_{1} + \overline{r}_{12} \partial N_{i} / \partial \xi_{2}\] \[c_{i} = \overline{m}_{21} \partial N_{i} / \partial \xi_{1} + \overline{m}_{22} \partial N_{i} / \partial \xi_{2}\] \[d_{i} = \overline{r}_{21} \partial N_{i} / \partial \xi_{1} + \overline{r}_{22} \partial N_{i} / \partial \xi_{2}\] (37)
for node i. Therefore, [B] matrix may be constructed by inserting Equations 33, 34 and 35 in Equation 21. The result reads
\[[B] = \begin{bmatrix} \dots \dots p_{11i} & p_{12i} & p_{13i} & p_{14i} & \dots \\ \dots p_{21i} & p_{22i} & p_{23i} & p_{24i} & \dots \\ \dots p_{31i} & p_{32i} & p_{33i} & p_{34i} & \dots \end{bmatrix}\] (38)
in which
\[\begin{split} p_{11i} &= a_i (J_{11}^t \bar{J}_{21}^t) + c_i (J_{21}^t \bar{J}_{21}^t); \quad p_{12i} &= b_i (J_{11}^t \hat{J}_{11}^t + J_{21}^t \hat{J}_{12}^t); \\ p_{13i} &= a_i (J_{12}^t \bar{J}_{21}^t) + c_i (J_{21}^t \bar{J}_{21}^t); \quad p_{14i} &= b_i (J_{11}^t \hat{J}_{21}^t + J_{21}^t \hat{J}_{22}^t); \\ p_{21i} &= a_i (J_{12}^t \bar{J}_{12}^t) + c_i (J_{22}^t \bar{J}_{12}^t); \quad p_{22i} &= d_i (J_{12}^t \hat{J}_{11}^t + J_{22}^t \hat{J}_{12}^t); \\ p_{23i} &= a_i (J_{12}^t \bar{J}_{22}^t) + c_i (J_{22}^t \bar{J}_{12}^t); \quad p_{24i} &= d_i (J_{12}^t \hat{J}_{21}^t + J_{22}^t \hat{J}_{12}^t); \\ p_{31i} &= \frac{a_i}{2} (J_{12}^t \bar{J}_{11}^t + J_{11}^t \bar{J}_{12}^t) + \frac{c_i}{2} (J_{22}^t \bar{J}_{11}^t + J_{21}^t \bar{J}_{12}^t); \\ p_{32i} &= \frac{b_i}{2} (J_{12}^t \hat{J}_{11}^t + J_{22}^t \hat{J}_{12}^t) + \frac{d_i}{2} (J_{22}^t \hat{J}_{11}^t + J_{21}^t \bar{J}_{12}^t); \\ p_{33i} &= \frac{a_i}{2} (J_{12}^t \bar{J}_{21}^t + J_{11}^t \bar{J}_{22}^t) + \frac{c_i}{2} (J_{22}^t \bar{J}_{21}^t + J_{21}^t \bar{J}_{12}^t); \\ p_{34i} &= \frac{b_i}{2} (J_{12}^t \hat{J}_{21}^t + J_{21}^t \bar{J}_{22}^t) + \frac{d_i}{2} (J_{11}^t \hat{J}_{21}^t + J_{21}^t \bar{J}_{22}^t) \end{aligned}\] for node i. For flat plane membrane, stress-strain relationship is controlled by constitutive equation
\[[C] = \frac{Et}{(1-v^2)} \begin{bmatrix} 1 & v & 0 \\ v & 1 & 0 \\ 0 & 0 & (1-v)/2 \end{bmatrix}\] (40)
The obtained matrices may be inserted in Equation 27 to construct element stiffness matrix. The element stiffness matrix is computed by using Gauss numerical integration technique.
5.2 Bar element
Bar element is depicted in Figure 5. The element has two nodes and each node has two degrees of freedom arranged in the form
\[\begin{aligned} &\{\widetilde{u}^t\} = \left\{ u_{11}^t \ w_{11}^t \ u_{21}^t \ w_{21}^t \right\} \\ &\{\widetilde{u}\} = \left\{ u_{11} \ w_{11} \ u_{21} \ w_{21} \right\} \end{aligned} \tag{41}\]
\[1 \longrightarrow 2 \longrightarrow 2\] \[L, EA\]
Figure 5. Bar element
The displacement is found by interpolating nodal displacement vector with shape functions,
\[\{u(\xi_1)\} = \sum_{i=1}^4 N_i(\xi_1) u_i \tag{42}\] in which
\[N_i(\xi_1) = \frac{1}{4}(1 + \overline{\xi}_{1i}\xi_1); \quad i = 1,2; \quad \xi_1 = 2x_1^r / L\] (43)
and \[\overline{n}_{11} = 2/L\]; \(\overline{r}_{11} = 1 - \partial \overline{u} / \partial x_1^r = 1 - (L/2) \partial \overline{u} / \partial \xi_1\), (44)
and Jacobian components may be computed and used to construct element stiffness matrix. The result is
\[[k] = \frac{J_{11}^{t} J_{11}^{t} EA}{L} \begin{bmatrix} \overline{J}_{11}^{t} \overline{J}_{11}^{t} & \hat{J}_{11}^{t} \overline{J}_{11}^{t} & -\overline{J}_{11}^{t} \overline{J}_{11}^{t} & -\hat{J}_{11}^{t} \overline{J}_{11}^{t} \\ \hat{J}_{11}^{t} \overline{J}_{11}^{t} & \hat{J}_{11}^{t} \hat{J}_{11}^{t} & -\hat{J}_{11}^{t} \overline{J}_{11}^{t} & -\hat{J}_{11}^{t} \overline{J}_{11}^{t} \\ -\overline{J}_{11}^{t} \overline{J}_{11}^{t} & -\hat{J}_{11}^{t} \overline{J}_{11}^{t} & \overline{J}_{11}^{t} \overline{J}_{11}^{t} & \hat{J}_{11}^{t} \overline{J}_{11}^{t} \\ -\hat{J}_{11}^{t} \overline{J}_{11}^{t} & -\hat{J}_{11}^{t} \hat{J}_{11}^{t} & \hat{J}_{11}^{t} \overline{J}_{11}^{t} & \hat{J}_{11}^{t} \hat{J}_{11}^{t} \end{bmatrix}\] \[(45)\]
6. Case Study
In this case, three examples are carried out as application of the proposed method. The first example consists of snap-through phenomenon of a simple shallow space truss. The second example consists of a bar subjected to a pair of rollers at left quarter point location. The last case is a problem of half space soft layer resting on hard layer with a rigid beam indented on soft layer surface. Special computer package program written in Fortran code is developed for each case.
6.1 Snap-through problem
A space truss shown in Figure 6(a) is subjected to vertical load. The ratio between truss height H and half span L is set to a small value such that within certain loading level, the truss experiences snap-through. The problem is analyzed using a bar 5 to remedy the truss stiffness so as to eliminate deteriorating stiffness matrix. The result is then extracted by the response of that single bar to obtain final load-displacement curve for crown node 6 as shown in Figure 6(b).
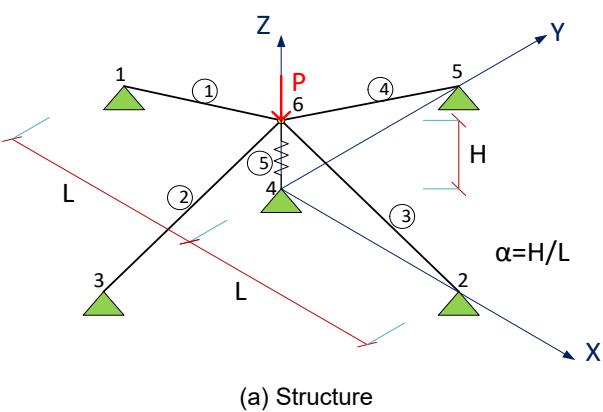
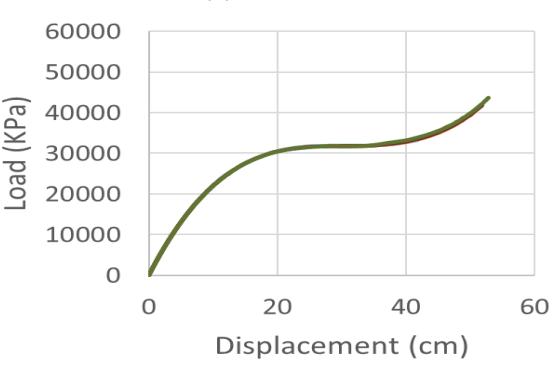
(b) Load - displacement curve
Figure 6. Snap - through problem
6.2 A bar subjected to a pair of rollers
A bar, restrained at the two ends, is connected to a pair of rollers at quarter point location as shown in Figure 7. The bar is divided into four equal length of segments. The system is modeled using bar element. In this example, two cases are considered, i.e., stick case and slip case between rollers and bar. In stick case, material
point initially connected to a node will undergo the same displacement with the node. In this case, Lagrangian displacement may be used. In slip case, different material points will be mapped onto node 2, while the node remains at constant location. According to the nature of nodal displacements, Eulerian displacement is used for node 2 and Lagrangian displacements for nodes 3 and 4. Total prescribed displacement exerted on node 2 is 50 cm, divided into 5 equal incremental steps, i.e., 20, 40, 60, 80, and 100% of maximum prescribed displacement. Relation between Lagrangian displacement at node 2 is plotted against longitudinal stress at node 2, the result is shown in Figure 8. In case of slip, Eulerian displacement and force at node 2 of element 1 is plotted with the result being shown in Figure 8. The plotted curve demonstrates geometrical nonlinearity of the system. It is demonstrated that slip between rollers and bar reduces the intensity of axial force.
6.3 Rigid bar indented on half-space soft layer
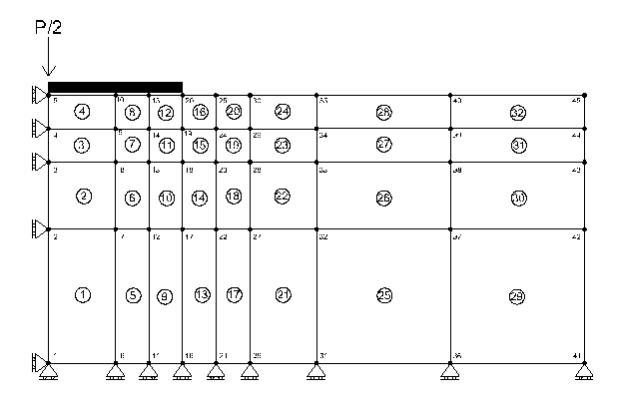
The last example consists of a rigid bar indented on half-space soft layer resting on hard layer. Due to symmetry, only half of the system is considered, taking 100 cm in thickness and 200 cm in width to be represented by a discrete model. Discrete model with 32 four node isoparametric membrane elements shown in Figure 9(a) is used to represent real structure. Upon indenting of rigid bar, node 5, 10, 15 and 20 undergo uniform vertical negative displacements. In this example, two cases are considered, i.e., stick and slip case. In stick case, material points and embedded nodes undergo equal displacement, hence Lagrangian displacement is used. In slip case, node 10, 15 and 20 will be associated with different material points of soft layer along loading stage.. These movements may be modeled by using horizontal Eulerian displacements, and the vertical movement of node 5, 10, 15 and 20 by Lagrangian displacements.
A computer package program is written to analyze this problem. The external force on bar exerts total indentation on the soft layer. The total indentation is 5 cm which is divided into five incremental steps, 0.2, 0.4, 0.6, 0.8 and 1.0 times total indentation. The result is utilized to plot curve between vertical displacement and vertical stress component at node 20. The results are performed for two cases, stick condition and slip condition between bar and soft layer. The two results are also compared to elastic linear case. The curves are depicted in Figure 9(b). The curves manifest geometrical nonlinearity of the system, and the comparison indicates that the slippage between bar and soft layer reduces the intensity of stress at soft layer around bar edge.

displacement cases. Figure 7. Structural model of structure, case 2
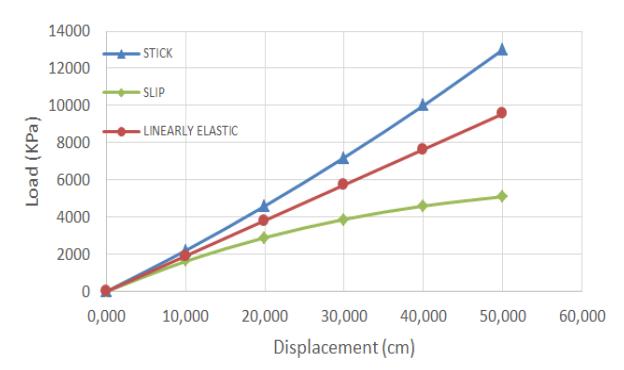
Figure 8. Displacement - force curve, case 2

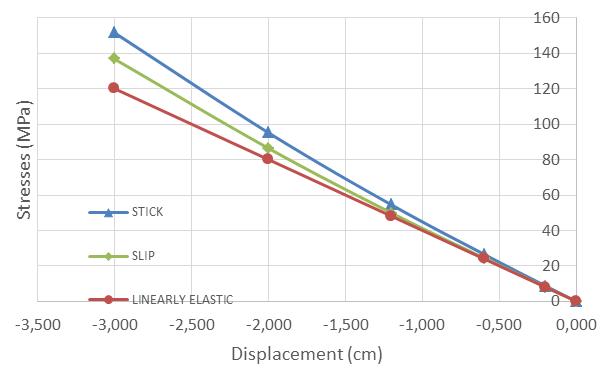
(b) Displacement - stress curve
Figure 9. Rigid bar indented on half - space soft layer
7. Conclusions
The paper has already presented the development and the formulation of the mixed Eulerian - Lagrangian displacement. Several conclusions are drawn as follows.
- 1. The use of the new concept of displacement provides some tools for modeling and analyzing structures in which displacement may not properly be modeled by conventional Lagrangian displacement. Specifically, slip between contacting bodies.
- 2. The three example cases exhibit the novelty of the use of mixed displacement, in the case of finitesimal
8. Acknowledgements
The paper was first proposed as a portion of writer's doctoral dissertation at University of Illinois at Urbana-Champaign, Illinois, USA under the guidance of Prof. Robert B. Haber and Prof. Jamshid Ghabouzzi, for which the writer extends his sincere appreciation. Keen typing of the paper and the preparing of the drawings were conducted by Mr. Ichsan Permana Putra, for whom the writer also conveys his appreciation.