
1. Latar Belakang
Masalah dinamik pada struktur jembatan adalah isu yang perlu diperhatikan pada saat proses perencanaan. Menurut Xia et al. (2018), permasalahan dinamik pada jembatan secara umum dapat dibagi menjadi dua kategori, yakni akibat (i) beban luar, termasuk di dalamnya adalah beban angin, beban gempa, beban
tumbukan dan (ii) akibat interaksi antara jembatan dan kendaraan. Beban dinamik seperti beban gempa biasanya dipertimbangkan dalam desain melalui analisis respons spektra. Sementara itu, beban dinamik akibat laju kendaraan biasanya dipertimbangkan dengan mengalikan hasil yang didapatkan dari analisis statis dengan suatu faktor perbesaran dinamis (dynamic magnification factor, DMF).
* Penulis Korespondensi: erwinlim@si.itb.ac.id
Khusus untuk perencanaan sebuah girder jembatan, seyogyanya, laju kendaraan, baik kendaraan bermotor ataupun kereta memegang peranan yang penting terhadap respons struktur yang didapatkan dari analisis. Banyak penelitian terdahulu menyebutkan bahwa semakin cepat laju kendaraan, maka repons dinamik jembatan juga akan meningkat (Cheung, dkk. 1999, Diana, dkk. 1989, Green dan Cebon, 1994). Respons struktur yang dimaksud bisa berupa gaya dalam maupun lendutan. Apabila permasalahan ini diselesaikan secara dinamis, maka seorang perencana harus menyelesaikan persamaan gerak (equation of motion) dinamis yang cukup kompleks. Sebagai contoh, persamaan gerak dinamis untuk kasus beban tunggal (single axle), p yang berjalan dengan suatu kecepatan tertentu, v di atas balok dua tumpuan (seperti diilustrasikan pada Gambar 1) diberikan oleh persamaan 1 (Yang, dkk. 2004, Chopra 2007, Paz dan Kim 2019):
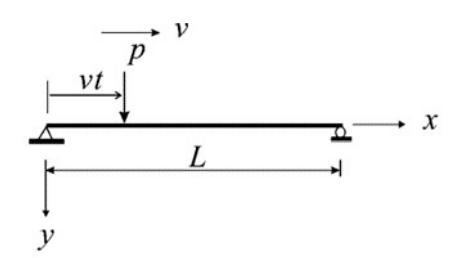
Gambar 1. Beban terpusat bergerak di atas dua tumpuan
\[m\ddot{u} + c_{\rho}\dot{u} + c_{i}I\dot{u}^{\dagger\dagger} + EIu^{\dagger\dagger} = p\delta(x - vt), \ 0 \le vt \le L\] (1)
dengan m adalah massa per satuan Panjang, \(c_e\) = koefisien redaman eksternal, \(c_i\) = koefisien redaman internal, L adalah panjang bentang, E = modulus elastisitas, dan d adalah Dirac delta function. Simbol prime (') dan dot (') masing-masing menunjukkan operasi penurunan terhadap koordinat x dan terhadap waktu t.
prakteknya, perencana biasanya menyelesaikan persamaan gerak di atas, namun mengalikan gaya dalam girder dengan faktor perbesaran momen (DMF). Faktor DMF ini biasanya bersifat empiris, merupakan fungsi dari panjang bentang, dan bukan merupakan fungsi dari kecepatan kendaraan sehingga dianggap tidak rasional (Yang dkk., 2004). Pada referensi lain, disebutkan bahwa faktor perbersaran ini berbanding linear terhadap variabel speed parameter (Yang dkk. 1995). Selain itu, sudah merupakan pengetahuan umum, bahwa untuk beban dengan kecepatan lambat (mendekati statis), faktor DMF ini menghasilkan koefisien yang cukup konservatif. Namun, akan menjadi hal yang menarik untuk dikaji, apakah faktor perbesaran dinamik ini bersifat konservatif atau tidak apabila dibandingkan dengan analisis dinamik beban bergerak, terutama untuk kasus kereta cepat, dimana kecepatan operasional dapat mencapai 350 km/jam.
Dalam penelitian ini, pertama-tama akan dilakukan analisis untuk girder kereta cepat dengan dua tumpuan sederhana yang dibebani dengan satu beban terpusat gandar (single axle). Dimensi girder standard (Dai et al. 2016) adalah sepanjang 32,6 m (Gambar 2a) dengan penampang box girder, dengan lebar girder di sisi atas adalah 12 m, lebar di sisi bawah adalah 5,5 m dan tinggi girder adalah 3,078 m. Pemodelan 3D dari girder dalam software ditunjukkan pada Gambar 2b.
Analisis ini, selain untuk memberikan gambaran sederhana mengenai efek kecepatan kendaraan, juga untuk memverifikasi hasil perhitungan software dengan solusi eksak/matematis yang tersedia. Dalam perbandingan, akan difokuskan pada dua respons girder yang utama, yakni perpindahan dan momen lentur di tengah bentang. Setelah itu, girder tersebut akan dianalisis untuk mendapatkan respons nya akibat rangkaian kereta (multi axle) berkecepatan tinggi (350 km/jam) dengan menggunakan software yang tersedia. Dari hasil respons struktur yang ada, kemudian

(a) Tampak samping dan penampang girder (Dai, et al. 2016)
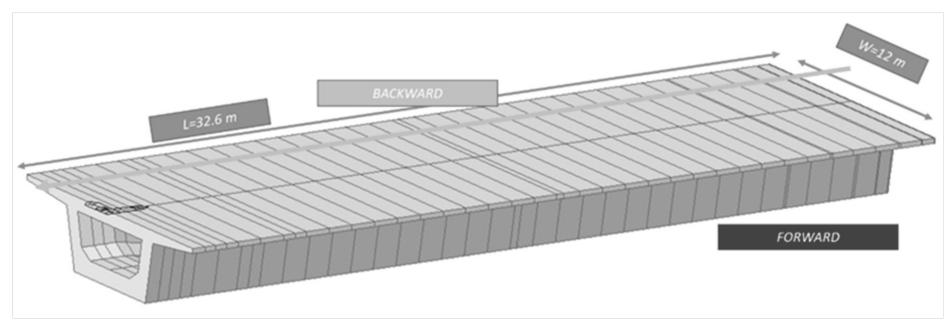
(b) Pemodelan software
Gambar 2. Dimensi dan pemodelan girder
dibandingkan hasil dari perhitungan dinamik dan hasil dari perhitungan statis yang dikalikan dengan DMF.
2. Dasar Teori
Persamaan gerak dinamis girder di atas dua tumpuan akibat beban terpusat p dengan kecepatan v yang diberikan pada Persamaan 1 di atas dapat diselesaikan dengan mengaplikasikan empat kondisi batas (boundary condition) dan dua inisial (initial condition). Kondisi batas yang diaplikasikan adalah di x = 0 dan x = L, untuk sebarang waktu t, lendutan (u) dan momen (EIu'') adalah nol atau ditulis secara matematis: u(0,t) = u(L,t) = EIu''(0,t) = EIu''(L,t) = 0. Sementara itu, dengan asumsi girder pada kondisi diam di saat awal (t=0), maka kondisi inisial dapat ditulis secara matematis sbb: u(x,0) = u(x,0) = 0. Menurut Yang et al. (2009), solusi untuk mendapatkan lendutan girder dari Persamaan 1 dapat ditulis sbb:
\[u(x,t) = \sum_{n=1}^{\infty} \frac{2pL^{2}/(E\ln^{4}\pi^{4})}{(1-S_{n}^{2})^{2} + (2\xi_{n}S_{n})^{2}} \times \left\{ (1-S_{n}^{2})\sin\Omega_{n} t - 2\xi_{n}S_{n}\cos\Omega_{n} t + e^{-\xi_{n}\omega_{n}t} \times \left[ 2\xi_{n}S_{n}\cos\omega_{dn} t + \frac{S_{n}}{\sqrt{1-\xi_{n}^{2}}} (2\xi_{n}^{2} + S_{n}^{2} - 1)\sin\omega_{dn} t \right] \right\}\] \[\times \sin\frac{n\pi x}{L}\] (2)
dengan \(\Omega_n\) adalah frekuensi eksitasi beban luar (\(\Omega_n = \frac{n\pi v}{L}\)); \(S_n\) adalah rasio frekuensi eksitasi beban luar terhadap frekuensi vibrasi girder mode ke-n (\(S_n = \Omega_n/\omega_n = n\pi v/(\omega_n L)\)); \(\omega_n\) adalah frekuensi girder (\(\omega_n = \frac{n^2\pi^2}{L^2}\sqrt{\frac{EI}{m}}\)); \(\omega_{\rm dn}\) adalah frekuensi teredam girder (\(\omega_{\rm dn} = \omega_n\sqrt{1-\xi_n^2}\)); \(\xi_n\) adalah koefisien redaman untuk mode ke-n.
Namun, redaman girder pada umumnya kecil dan dapat diabaikan sehingga Persamaan (2) dapat disederhanakan menjadi:
\[u(x,t) = \frac{2pL^3}{EI\pi^4} \sum_{n=1}^{\infty} \frac{1}{n^4} \sin \frac{n\pi x}{L} \left( \frac{Sin\Omega_n t - S_n \sin \omega_n t}{1 - S_n^2} \right)\](3)
Sementara itu, gaya dalam girder, misalnya momen lentur akibat beban p yang melaju tadi dapat ditulis sebagai M(x,t) = -EIu''(x,t) atau
\[M(x,t) = \frac{2pL}{\pi^2} \sum_{n=1}^{\infty} \frac{1}{n^2} \sin \frac{n\pi x}{L} \left( \frac{Sin\Omega_n t - S_n \sin \omega_n t}{1 - S_n^2} \right)\](4)
Keuntungan dari penyelesaian persamaan gerak dinamis adalah selain bisa didapatkan lendutan dan gaya dalam, juga bisa didapatkan percepatan pada plat lantai. Khusus untuk girder kereta, menurut EN 1990-A2, percepatan vertikal plat lantai dibatasi sebesar 3,5 m/s².
Pada proses perencanaan suatu girder, perencana pada umumnya diijinkan untuk melakukan analisis statis dengan menggambarkan garis pengaruh (influence line). Garis pengaruh ini dapat mensimulasikan respons struktur di satu titik tertentu akibat beban terpusat yang bergerak dari ujung ke ujung girder. Respons statis (gaya dalam dan perpindahan) ini kemudian dikalikan dengan faktor perbesaran dinamik (DMF). Persamaan 5a dan 5b adalah faktor DMF untuk kereta api dan disadur dari Eurocode EN 1991-2:2003, masing-masing untuk trek kereta yang dilakukan pemeliharaan secara rutin, dan secara biasa.
\[\phi_{EN_{-1}} = \frac{1,44}{\sqrt{L_{\phi}} - 0,2} + 0.82 \tag{5a}\]
\[\phi_{EN_{-2}} = \frac{2,16}{\sqrt{L_{\phi}} - 0,2} + 0,73 \tag{5b}\]
Sementara itu, China Code, TB 10621-2014 juga memperbolehkan penggunaan faktor DMF dalam desain girder jembatan seperti yang disajikan pada Persamaan 6.
\[\phi_{TB} = 1 + \left(\frac{1,44}{\sqrt{L_{\phi}} - 0.2} + 0.18\right) \tag{6}\]
Seiring dengan berkembangnya dunia komputasional, untuk mendapatkan hasil yang lebih akurat, banyak peneliti yang sudah mempertimbangkan interaksi antara girder dan kendaraan dalam analisisnya seperti dalam Yang dkk. (2004), Ngo-Tran dkk. (2008), Xia dkk. (2018), Slacher dan Adam (2015), Yang dan Yau (1997), dan Eshkevari dkk. (2020). Namun, analisis interaksi ini belum dibahas dalam penelitian ini.
3. Analisis Beban Terpusat (single axle)
Analisis dengan beban terpusat ini cukup sederhana dan tersedia solusi eksaknya sehingga mudah memverifikasi hasil output software. Efek dinamik dari laju kendaraan juga dapat teridentifikasi. Pertama-tama, box girder seperti pada Gambar 1 dimodelkan, kemudian
Tabel 1. Output analisis statis akibat beban gandar saja
| Momen lentur (kN.m) | Lendutan ∆ (mm) | ||
|---|---|---|---|
| 1 | 170 kN | 2677,5 | 0,79 |
| 2 | 190 kN | 2992,5 | 0,89 |
| 3 | 210 kN | 3307,5 | 0,95 |

Gambar 3. Contoh input dan output pemodelan akibat beban terpusat (beban p = 210 kN)
dilakukan simulasi untuk tiga beban terpusat yang mewakili beban gandar HSLM, yakni 170 kN, 190 kN, dan 210 kN dengan variasi kecepatan mulai dari 100 km/jam sampai dengan 550 km/jam. Diasumsikan bahwa terdapat dua lajur dan dua kereta berpapasan.
3.1 Analisis statis beban terpusat
Output dari hasil analisis statis untuk momen lentur dan lendutan di tengah bentang disajikan pada Tabel 1. Nilai ini dapat diverifikasi dengan mudah dengan solusi eksak, dimana momen lentur maksimum di tengah bentang adalah \(\frac{pL}{d}\), dengan p = 2 x beban gandar (dua kereta berpapasan).
3.2 Analisis dinamik
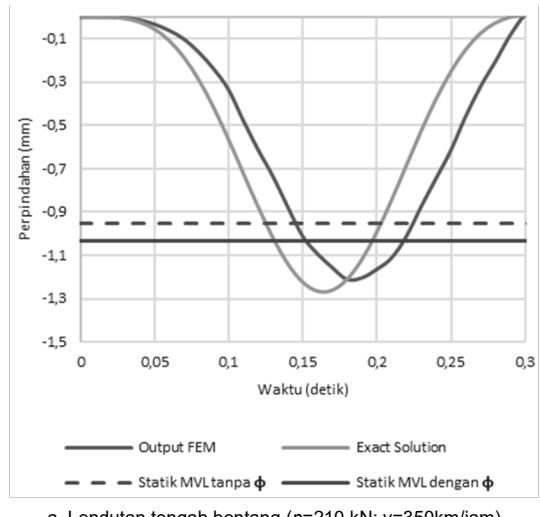
Selanjutnya, dilakukan analisis dinamik dimana beban terpusat p tersebut diberi kecepatan. Gambar 4 dan Gambar 5 berikut masing-masing menunjukkan respons struktur terhadap waktu apabila kecepatannya adalah 100 km/jam (merepresentasikan kendaraan biasa) dan 350 km/jam (merepresentasikan kendaraan cepat). Untuk masing-masing gambar tersebut, diplot respons struktur (perpindahan dan momen lentur di tengah bentang) antara hasil perhitungan software dan dari solusi eksak (Persamaan 3 dan 4). Dari Gambar 4 dan Gambar 5, dapat terlihat bahwa secara umum terdapat perbedaan respons struktur terhadap waktu antara hasil output software dan solusi eksak. Namun, nilai respons maksimum antara kedua hasil ini relatif sama. Gambar 4a dan Gambar 4b menunjukkan bahwa untuk kecepatan kereta relatif rendah (100 km/ jam), nilai momen maksimum dan lendutan yang dihasilkan dari kedua analisis (FEM dan eksak) relatif masih lebih kecil dibandingkan dengan hasil analisis statis moving load vang diperbesar dengan faktor Φ (DMF). Namun, ketika kecepatan kereta mencapai 350 km/jam, maka nilai momen maksimum yang didapatkan dari analisis dinamik cenderung lebih besar daripada nilai yang didapatkan dari hasil analisis statis moving load yang diperbesar dengan DMF (Gambar
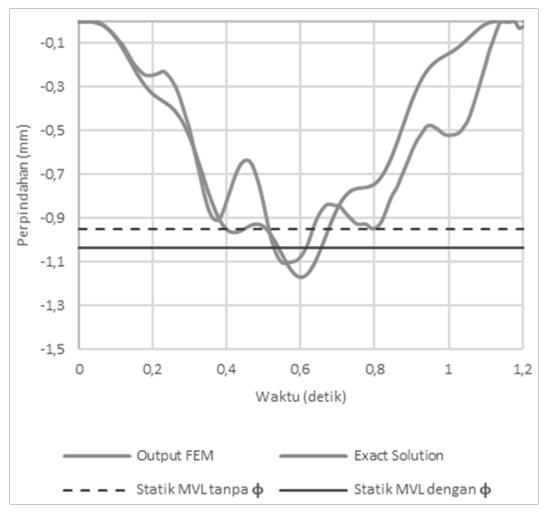
(a) Lendutan tengah bentang (p=210 kN; v=100km/jam)
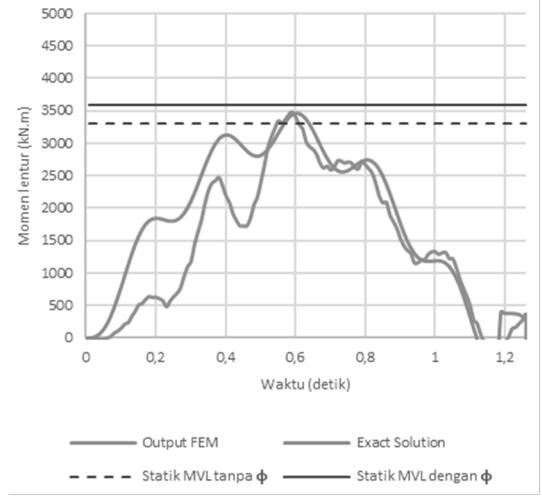
b. Momen tengah bentang (p=210 kN: v=100km/jam)
Gambar 4. Perbandingan respon statik, solusi persamaan tertutup dan output software untuk kecepatan v = 100 km/jam

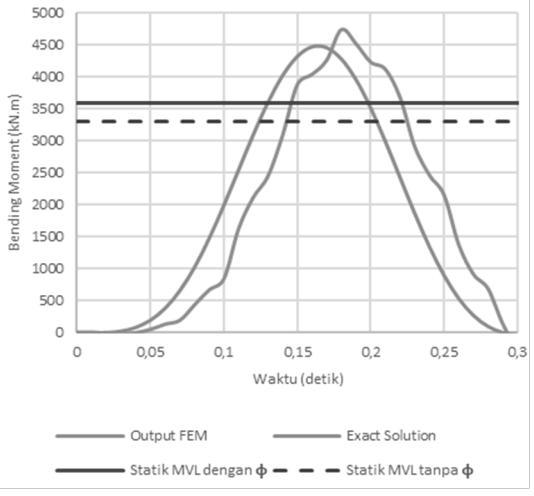
b. Momen tengah bentang (p=210 kN; v=350km/jam)
Gambar 5. Perbandingan respon statik, solusi persamaan tertutup dan output software untuk kecepatan v = 350 km/jam
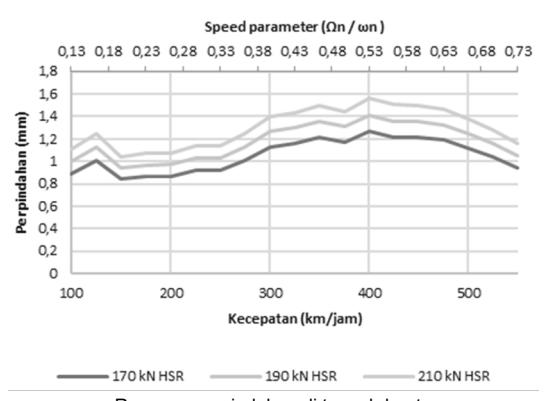
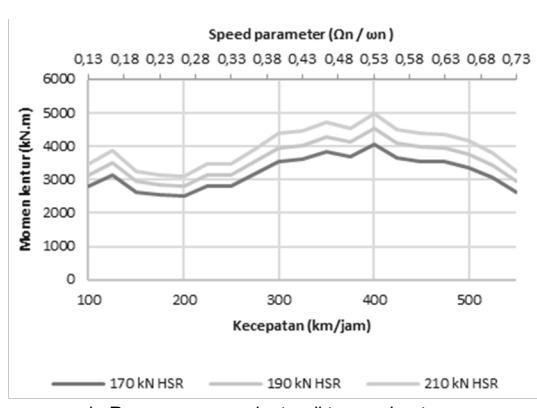
a. Respons perpindahan di tengah bentang
b. Respons momen lentur di tengan bentang
Gambar 6. Respons maksimum struktur berbagai kecepatan kereta
a. Lendutan tengah bentang
(b) Momen lentur tengah bentang
Gambar 7. Rasio hasil analisis dinamik terhadap statik untuk berbagai variasi kecepatan untuk beban 210 kN
Analisis dinamik kemudian dilakukan untuk masingmasing beban terpusat 170 kN, 190 kN, dan 210 kN dengan variasi kecepatan 100 km/jam sampai dengan 550 km/jam. Respons-respons maksimum untuk setiap laju kendaraan ini kemudian diplot pada Gambar 6. Gambar 6a menunjukkan respons lendutan girder di tengah dan Gambar 6b menunjukkan respons momen lentur girder di tengah bentang. Gambar 6 menunjukkan hasil yang jelas bahwa semakin besar bebannya, maka semakin besar pula lendutan dan momen lenturnya. Di sisi lain, analisis ini menunjukkan bahwa untuk kecepatan 100 km/jam s.d 400 km/jam, respons struktur akan semakin membesar seiring dengan semakin lajunya kecepatan kereta. Namun, respons ini akan mengecil setelah kecepatan kereta melampaui 400 km/jam atau speed parameter 0,53. Speed parameter didefinisikan sebagai perbandingan dari frekuensi beban (kereta) terhadap frekuensi getar alami dari struktur jembatan sbb:
\[S = \frac{\Omega_n}{\omega_n} = \frac{\pi v}{\omega_n L} \tag{7}\]
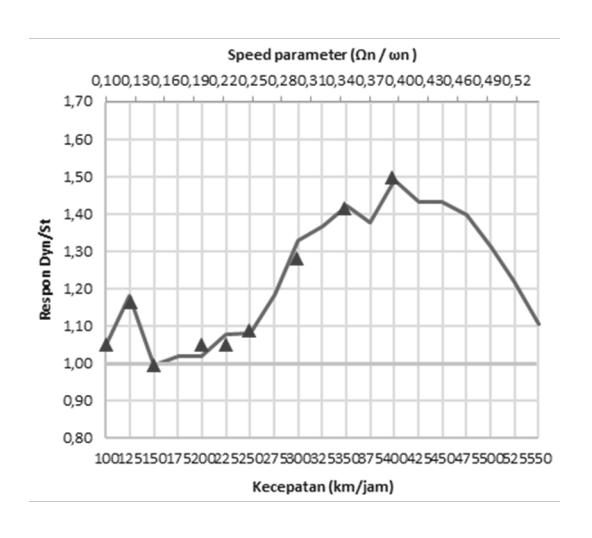
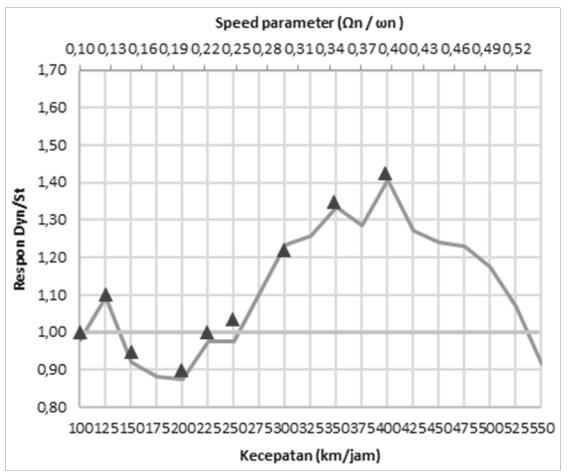
Rasio perbandingan antara hasil analisis dinamik terhadap dan statis (atau faktor perbesaran dinamis, DMF) dengan untuk beban terpusat sebesar 210 kN berbagai variasi kecepatan ditunjukkan pada Gambar 7. Baik Gambar 7a (lendutan di tengah bentang) maupun
Gambar 7b (momen lentur di tengah bentang) menunjukkan bahwa rasio DMF yang didapatkan dari software dan solusi eksak adalah sama. Selain itu, dapat juga terlihat suatu tendensi yakni angka DMF ini akan semakin membesar seiring dengan kenaikan laju kendaraan ke titik tertentu, dalam hal ini 400 km/jam dan akan menurun setelahnya. Nilai DMF ini bisa mencapai 1,35 ~ 1,4 pada kecepatan 350 km/jam dan meningkat ke nilai sebesar 1,4 ~ 1,5 pada kecepatan 400 km/jam. Obervasi serupa juga diperoleh Yang dkk. (2004).
Representasi lain dari rasio hasil analisis dinamik terhadap analisis statis ini untuk beban terpusat 170 kN, 190 kN, dan 210 kN dengan kecepatan konstan (350 km/jam) dapat dilihat pada Gambar 8.
4. Analisis Beban Kereta (multi axle)
Analisis selanjutnya dilakukan dengan memberikan beban kereta cepat pada box girder yang sama (Gambar 2). Dua analisis akan dilakukan, yakni analisis statis dan dinamis. Analisis statis menggunakan beban ZK sesuai TB10621-2014, sedangkan untuk analisis dinamik, menggunakan beban gandar kereta cepat tipe CR400AF dengan berbagai variasi kecepatan.
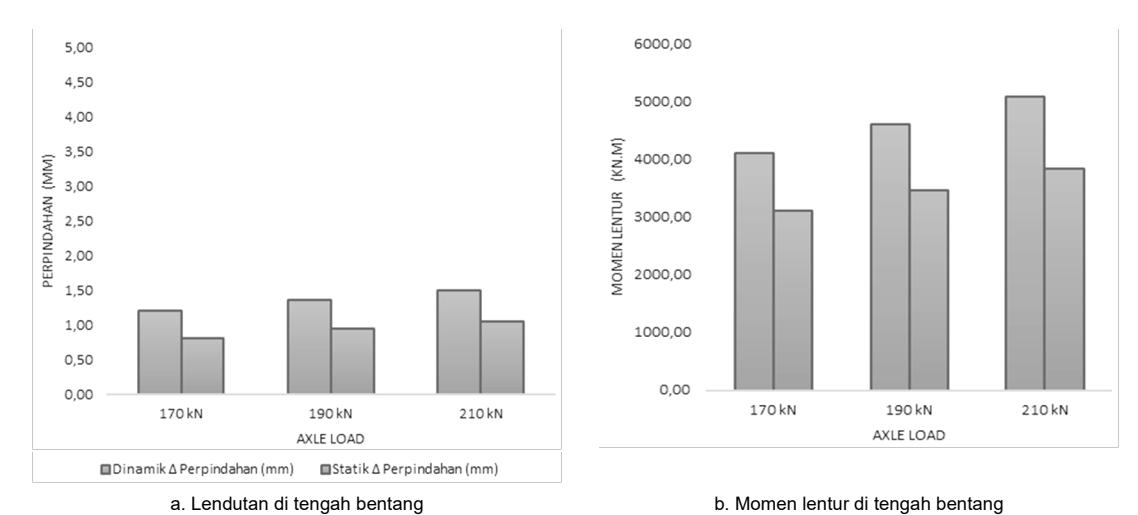
Gambar 8. Rasio hasil analisis dinamik terhadap statik untuk beban 170kN, 190 kN, dan 210 kN untuk kecepatan 350 km/jam
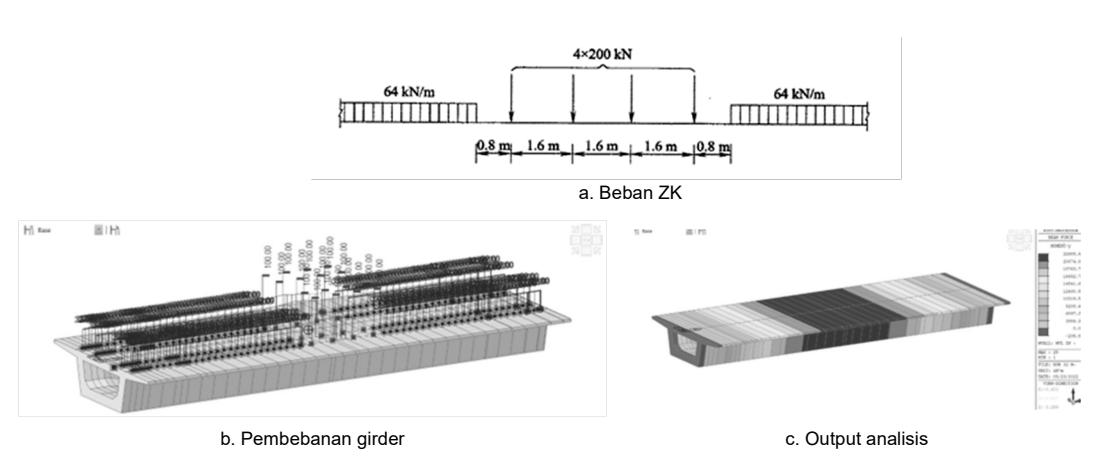
Gambar 9. Analisis statis dengan beban ZK
4.1 Analisis statis beban ZK
Beban ini merupakan persyaratan mengacu pada China Code dimana rangkaian kereta memiliki beban terpusat di tengah sebesar 200 kN yang berjumlah 4 gandar, lalu di depan dan belakang adalah beban merata sebsar 64 kN/m sesuai Gambar 9.
Dari hasil analisis statis, didapatkan bahwa momen lentur dan perpindahan vertikal maksimum di tengah
Gambar 10. Ilustrasi trainset CR400AF (rail.kychung.com)

Gambar 11. Skema beban gandar kereta cepat CR400AF
a. Lendutan tengah bentang b. Momen lentur tengah bentang
Gambar 12. Output analisis dinamik untuk beban CR400AF
bentang adalah sebesar 21442.1 kN/m dan 7,43 mm. Sedangkan putaran sudut di tumpuan mencapai 0,000661 rad
4.2 Analisis dinamik beban CR400AF
Pada analisis pembebanan dinamik digunakan satu rangkaian kereta CR400AF terdiri dari 8 gerbong dengan komposisi empat gerbong dengan penggerak dan empat gerbong tanpa penggerak (Gambar 10) dengan beban per gandar maksimal adalah 170 kN (Gambar 11). Kecepatan rangkaian kereta bervariasi mulai dari 100 km/jam sampai dengan 550 km/jam.
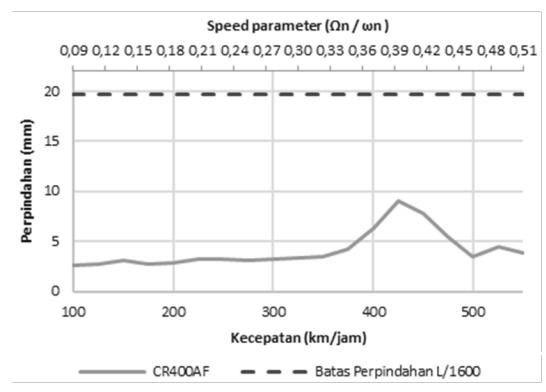
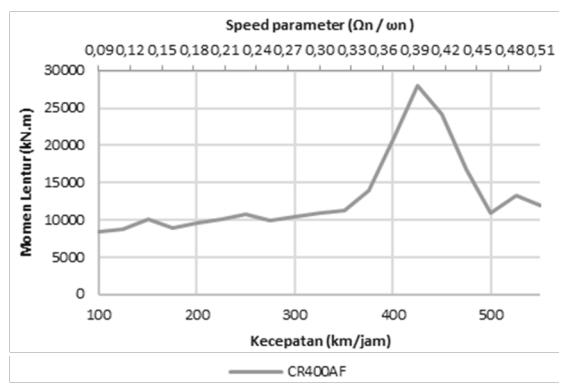
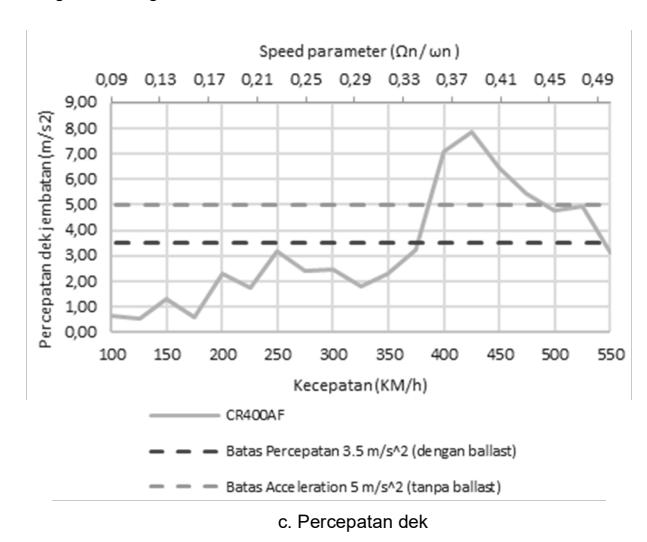
Hasil analisis dinamik ini kemudian disajikan pada Gambar 12 berikut. Analisis menunjukkan bahwa semua respons maksimum, baik lendutan (Gambar 12a), momen lentur (Gambar 12b), dan percepatan pada dek
(Gambar 12c) terjadi saat speed parameter 0,40 atau ekivalen dengan kecepatan 425 km/jam. Gambar 12a menunjukkan bahwa lendutan yang terjadi masih di bawah yang diizinkan, yakni L/1600 atau ekivalen dengan 20 mm. Sementara itu, Gambar 12c menunjukkan bahwa untuk kecepatan operasional 350 km/jam, percepatan yang terjadi di dek masih di bawah batas percepatan maksimm yang diizinkan, baik itu berupa trek ber-ballast atau tak ber-ballast.
4.3 Diskusi terhadap faktor perbesaran dinamis (DMF)
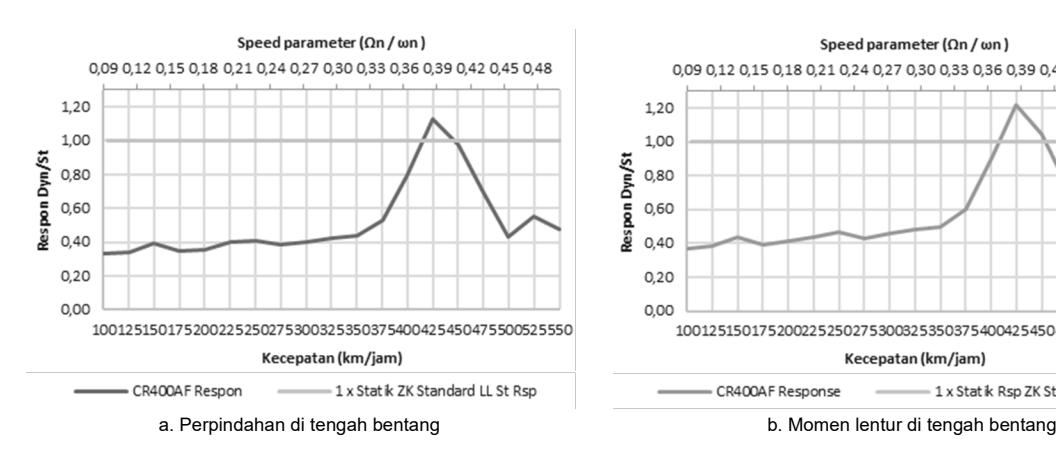
Seperti yang telah disampaikan sebelumnya, dalam proses desain, Code memperbolehkan analisis statis dengan mengalikan responsnya dengan suatu angka DMF. Untuk kasus yang ditinjau, nilai DMF menurut TB 10621-2014 adalah 1,086. Gambar 13 berikut
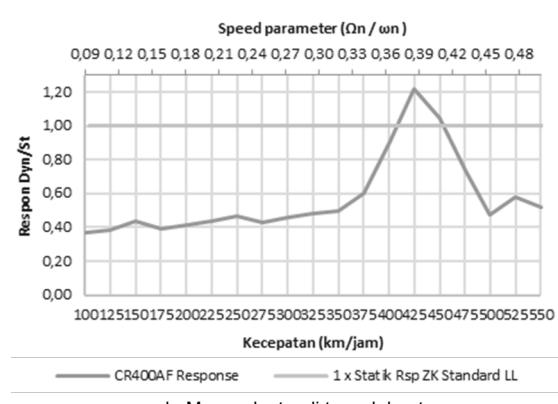
Gambar 13. Rasio respons dinamik terhadap statik untuk beban CR400AF
menunjukkan perbandingan respons analisis dinamik terhadap analisis statis yang didapatkan dari analisis di atas. Gambar 13a menunjukkan bahwa untuk kecepatan di bawah 400 km/jam, nilai DMF yang dipersyaratkan bersifat konservatif, sebab nilai DMF masih lebih besar daripada perbesaran dinamik aktual yang mungkin terjadi. Perbesaran respons dinamik struktur yang agak besar akan terjadi pada kecepatan sekitar 425 km/jam. Kecepatan ini sudah sangat tinggi dan di atas kecepatan operasional CR400AF yaitu 350 km/jam.
5. Kesimpulan
Berdasarkan hasil analisis statik dan dinamik, baik terhadap beban terpusat maupun beban kereta, yang telah dilakukan, maka dapat disimpulkan beberapa hal sebagai berikut:
- 1. Solusi eksak dan solusi metode elemen hingga untuk kasus beban terpusat yang berjalan (moving load) memberikan nilai absolut yang hampir sama, namun terdapat sedikit perbedaan untuk respons riwayat waktunya.
- 2. Respons struktur, baik perpindahaan maupun momen lentur maksimum di tengah bentang, akibat beban dinamik yang direpresentasikan dengan kecepatan beban berjalan cenderung lebih besar daripada respons struktur akibat beban statik. Rasio perbesaran ini dapat mencapai 40% - 50% untuk kecepatan 400km/jam.
- 3. Untuk kasus pembebanan dengan beban rangkaian kereta CR400AF yang berjalan, rasio respons dinamik terhadap respons statis (faktor perbesaran dinamis) dapat mencapai 1,25 pada kecepatan 425 km/jam.
- 4. Faktor perbesaran dinamis yang direkomendasikan oleh Code cenderung konservatif untuk beban kereta CR40AF dengan kecepatan operasional 350km/jam.